| |
|
| 管道喷涂机器人喷枪运动速度优化 |
潘玉龙1,2,王国磊1,朱丽3,陈雁1,陈恳1( ) ) |
2. 空军预警学院 黄陂士官学校, 武汉 430019
3. 成都飞机工业(集团)有限责任公司 制造工程部, 成都 610092); |
|
| Optimization of spray gun speed for pipe painting robots |
| Yulong PAN1,2,Guolei WAN1,Li ZHU3,Yan CHEN1,Ken CHEN1() |
1. Department of Precision Instruments and Mechanology, Tsinghua University, Beijing 100084, China
2. Huangpi Noncommissioned Officer School, Air Force Early Warning Academy, Wuhan 430019, China
3. Department of Manufacturing Engineering, Chengdu Aircraft Industrial (Group) Co., Ltd, Chengdu 610091, China |
| |
| 文章导读 |
|
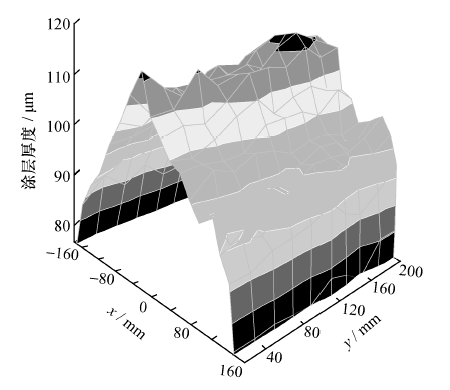
摘要为提高机器人喷涂时涂层厚度均匀性,首先根据机器人喷涂时涂层形状呈椭圆形的实际情况,选择双β分布喷枪模型对涂层厚度分布进行描述,在此基础上分析喷枪运动过程中涂层厚度累积机理。通过喷枪匀速运动条件下的圆形管道喷涂实验,研究管道内壁涂层厚度与涂料涂着效率变化规律之间的关系,提出机器人喷涂作业时喷枪运动速度优化方法,即保持喷枪运动速度与涂料涂着效率之间比值恒定。实验结果表明,该速度优化方法可有效提高涂层厚度均匀性。
|
| 关键词 :机器人,喷枪模型,涂层厚度均匀性,涂着效率,喷枪运动速度 |
Abstract:Paint coating thickness uniformity is investigated with a double beta spray gun model to investigate the coating thickness distribution assuming that the robot spraying coating shape is oval. Then, the coating mechanism is analyzed for the spray gun model. The relationship between the coating thickness variation and the coating transfer efficiency is studied experimentally with a uniform gun motion speed. An optimal spray gun motion speed is found with the best results found for a constant ratio of the spray gun speed to the paint transfer efficiency. The experimental results indicate that the speed optimization method effectively improves the coating thickness uniformity.
|
| Key words:robotspray gun modelcoating thickness uniformitycoating transfer efficiencyspray gun moving speed |
| 收稿日期: 2012-09-07 出版日期: 2015-04-16 |
|
| 基金资助:国家 “八六三” 高技术项目 (2009AA043701);清华大学摩擦学国家重点实验室项目 (SKLT09A03) |
| [1] | Seegmiller N, Franks R, Bailiff J. Precision Robotic Coating Application and Thickness Control Optimization for F-35 Final Finishes [R]. SAE 2009-01-3280. SAE 2009 Aero Tech Congress & Exhibition. Seattle, WA, USA, 2009. |
| [2] | 周光华, 谭延江. 新型雷达吸波涂料涂装技术研究[J]. 表面技术, 2011, 1(2): 68-70. ZHOU Guanghua, TAN Yanjiang. Study on painting technology of the novel radar absorbing coating[J]. Surface Technology, 2011, 1(2): 68-70. (in Chinese) |
| [3] | 张明. 浅谈机器人喷涂的膜厚控制[J]. 现代涂料与涂装, 2006, 9(6): 31-33. ZHANG Ming. Brief introduction of film thickness control during paint spraying by robot[J]. Modern Paint & Finishing, 2006, 9(6): 31-33. (in Chinese) |
| [4] | 王国磊, 陈恳, 陈雁, 等. 变参数下的空气喷枪涂层厚度分布建模[J]. 吉林大学学报: 工学版, 2012, 1(1): 188-192. WANG Guolei, CHEN Ken, CHEN Yan, et al.Film thickness distribution model with variable parameters for air spray gun[J]. Journal of Jilin University: Engineering and Technology Edition, 2012, 1(1): 188-192. (in Chinese) |
| [5] | CHEN Heping, XI Ning. Automated tool trajectory planning of industrial robots for painting composite surfaces[J]. Adv Manuf Technol, 2008, 35: 680-696. |
| [6] | 曾勇, 龚俊. 面向自然二次曲面的喷涂机器人喷枪轨迹优化[J]. 中国机械工程, 2011, 3(2): 282-290. ZENG Yong, GONG Jun. Trajectory optimization of spray painting robot for natural quadric surfaces[J]. China Mechanical Engineering, 2011, 3(2): 282-290. (in Chinese) |
| [7] | 陈伟, 赵德安, 梁震. 喷涂机器人的喷枪轨迹优化设计与实验[J]. 中国机械工程, 2011, 17(9): 2104-2108. CHEN Wei, ZHAO Dean, LIANG Zhen. Design of tool path planning of robotic spray painting and its experiments[J]. China Mechanical Engineering, 2011, 17(9): 2104-2108. (in Chinese) |
| [8] | Freund E, Rokossa D, Rossmann J. Process-oriented approach to an efficient off-line programming of industrial robots [C]∥Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society. Piscataway, NJ, USA: IEEE, 1998: 208-213. |
| [9] | Suh S H, Woo I K, Noh S K. Development of an automatic trajectory planning system (ATPS) for spray painting robots [C]∥Proceedings of IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 1991: 1948-1955. |
| [10] | Balkan T, Arikan M A S. Surface and process modeling and off line programming for robotic spray painting of curved surfaces[J]. Journal of Robotic Systems, 2000, 17(9): 479-494. |
| [11] | Balkan T, Arikan M A S. Modeling of paint flow rate flux for circular paint sprays by using experimental paint thickness distribution[J]. Mechanics Research Communications, 1999, 26(5): 609-617. |
| [12] | 张永贵, 黄玉美, 高峰, 等. 喷漆机器人空气喷枪的新模型[J]. 机械工程学报, 2006, 42(11): 226-233. ZHANG Yonggui, HUANG Yumei, GAO Feng, et al.New model for air spray gun of robotic spray painting[J]. Chinese Journal of Mechanical Engineering, 2006, 42(11): 226-233. (in Chinese) |