| |
| 文章导读 |
|
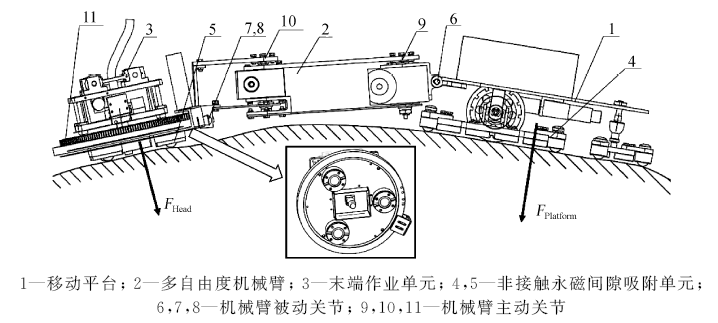
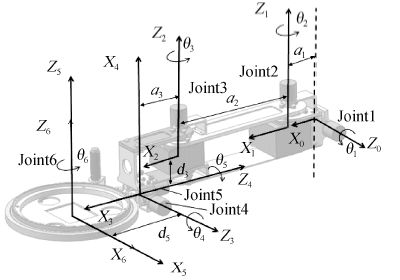
摘要为了解决水轮机叶片坑内修焊空间加工作业需求,研制了适用于复杂曲面的两端吸附式爬壁机器人,该机器人由永磁间隙吸附式移动平台、多自由度机械臂(包括3个主动关节和3个被动关节)和永磁间隙吸附式末端作业单元组成。针对给定末端路径,这种结构的机器人需基于局部平面假设来完成主动关节的轨迹生成。但经仿真分析,在1.5 m半径外球面上的简化造成的误差达到5 mm以上,不满足修焊工艺要求精度。为此,提出在机械臂加工运动过程中,通过Jacobi矩阵将末端作业单元在Descartes坐标系下的误差转换为关节角修正量以完成动态修正的算法。仿真实验表明,该算法可有效降低运动路径误差至1 mm以下。
|
| 关键词 :机器人,机械臂,复杂未知曲面,误差分析,修正 |
Abstract:A wall climbing robot with both ends using magnetic adsorption is developed for on-site hydraulic turbine blade repairs. The magnetic mobile platform has a multiple degrees of freedom (DOF) manipulator and an end operating unit. The manipulator has 3 active and 3 passive joints, so the trajectory planning method for a given working path assumes a local curve where the end effector of the manipulator works on a plane. However, simulations for a sphere with a 1.5 m curvature show that the path error due to this assumption is larger than 5 mm. A correction algorithm to reduce the error transforms the error from Cartesian space to the joint space through a Jacobian matrix. Simulations show that the error can be reduced to less than 1 mm by this algorithm.
|
| Key words:robotmanipulatorcomplicated unknown curveerror analysiscorrection |
| 收稿日期: 2013-10-10 出版日期: 2015-04-16 |
|
| 基金资助:国家 “八六三” 高技术项目(2007AA04Z258);国家自然科学基金项目(50875147) |
| [1] | 桂仲成, 陈强, 孙振国, 等. 爬壁机器人的轮式移动机构的转向功耗[J]. 清华大学学报: 自然科学版, 2008, 48(2): 161-164. GUI Zhongcheng, CHEN Qiang, SUN Zhenguo, et al.Turning power losses in the wheeled locomotion mechanism for a wall climbing robot[J]. J Tsinghua Univ: Sci and Tech, 2008, 48(2): 161-164. (in Chinese) |
| [2] | 徐佳, 孙振国, 陈强, 等. 水轮机叶片坑内修焊轮式移动机器人定位算法[J]. 清华大学学报: 自然科学版, 2008, 48(2): 171-165. XU Jia, SUN Zhenguo, CHEN Qiang, et al.Localization algorithm for wheeled mobile robot for on-site repair of hydraulic turbine blades[J]. J Tsinghua Univ: Sci and Tech, 2008, 48(2): 171-165. (in Chinese)〖WX)〗 |
| [3] | 马献德, 陈强, 孙振国, 等. 水轮机叶片坑内修复机器人姿态估计改进算法[J]. 清华大学学报: 自然科学版, 2011, 51(5): 697-701. MA Xiande, CHEN Qiang, SUN Zhenguo, et al.Improved pose estimation algorithm for an on-site turbine blade repair robot[J]. J Tsinghua Univ: Sci and Tech, 2011, 51(5): 697-701. (in Chinese) |
| [4] | 项康泰, 孙振国, 戴红军, 等. 水轮机叶片修焊机器人控制系统研究 [C]// 第15次全国焊接学术会议论文集. 西宁, 2010. XIANG Kangtai, SUN Zhenguo, DAI Hongjun, et al. Research of control system of turbine blade repairing robot [C]// Proc 15th National Welding Conf. Xining, China, 2010. (in Chinese) |
| [5] | Hazel B, Cote J, Laroche Y, et al.A portable, multiprocess, track-based robot for in situ work on hydropower equipment[J]. Journal of Field Robotics, 2012, 29(1): 69-101. |
| [6] | Lessard J, Bigras P, Liu Z, et al.Characterization, modeling and vibration control of a flexible joint for a robotic system[J]. Journal of Vibration and Control, 2014, 20(6): 943-960. |
| [7] | 桂仲成. 水轮机叶片坑内修复用爬壁机器人研究 [D]. 北京: 清华大学, 2006. GUI Zhongcheng. Study on Wall Climbing Robot for Hydraulic Turbine Blade On-Site Repair [D]. Beijing: Tsinghua University, 2006. (in Chinese) |
| [8] | 马献德. 水轮机叶片修复机器人自主定位研究 [D]. 北京: 清华大学, 2011. MA Xiande. Research on the Self Localization of Mobile Robot for Hydraulic Turbine Blade On-Site Repair [D]. Beijing: Tsinghua University, 2011. (in Chinese) |
| [9] | Peiper D L. The Kinematics of Manipulators under Computer Control [R]. Stanford, CA, USA: Stanford University, 1968. |
| [10] | Jazar R N. Theory of Applied Robotics: Kinematics, Dynamics, and Control[M]. Berlin, Germany: Springer, 2007. |
| [11] | Manocha D, Canny J F. Efficient inverse kinematics for general 6R manipulators[J]. IEEE Transactions on Robotics and Automation, 1994, 10(5): 648-657. |
| [12] | 孙立宁, 任子武, 王振华. 基于混合类电磁机制算法的机械臂逆运动学解[J]. 机械工程学报, 2012(17): 21-28. SUN Lining, REN Ziwu, WANG Zhenhua. Inverse kinematics solution for robot manipulator based on hybrid electromagnetism-like mechanism algorithm[J]. Journal of Mechanical Engineering, 2012(17): 21-28. (in Chinese) |
 ),张文增1,陈强1,2
),张文增1,陈强1,2