1.Key Laboratory of Advanced Transducers and Intelligent Control System, Ministry of Education, Taiyuan University of Technology, Taiyuan 030024, China 2.School of Information Engineering, Guangdong University of Technology, Guangdong 510006, China 3.Guangdong Key Laboratory of Photonics Information Technology, Guangdong 510006, China 4.No.30 Institute of China Electronic Technology Corporation, Chengdu 610041, China 5.Science and Technology on Communication Laboratory, Institute of Southwestern Communication, Chengdu 610041, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 61775158, 61805168, 61961136002, 61927811, U19A2076, 11904057), the National Cryptography Development Fund, China (Grant No. MMJJ20170127), the China Postdoctoral Science Foundation (Grant Nos. 2018M630283, 2019T120197), the Natural Science Foundation of Shanxi Province, China (Grant No. 201901D211116), and the Program for the Top Young Academic Leaders of High Learning Institutions of Shanxi Province, China
Received Date:23 February 2021
Accepted Date:23 March 2021
Available Online:07 June 2021
Published Online:05 August 2021
Abstract:Prediction of chaotic laser has a wide prospect of applications, such as retrieving lost data, providing assists for data analysis, testing data encryption security in cryptography based on chaotic synchronization of lasers. We propose and demonstrate a new method of using time delayed photonic reservoir computing (RC) to forecast the continuous dynamical evolution of chaotic laser from previous measurements. Specifically, the time delayed photonic RC based on semiconductor laser with optical injection and feedback structure is established as a prediction system. Chaotic laser, as input signal, is generated by semiconductor laser with external disturbance.The time delayed photonic RC used in this stage is a novel implementation, which consists of three parts: the input layer, the reservoir and the output layer. In the input layer, the chaos laser from the semiconductor with an optical feedback needs to preprocess and multiply by a mask signal. The reservoir is the master-slave configuration consisting of a response laser with the optical feedback and light injection. In the feedback loop, there are N virtual nodes at each interval θ with a delay time of τ (N = τ/θ). The reservoir performs the mapping of the input signal onto a high-dimensional state space. In the output layer, the output of the reservoir is a linear combination of the reservoir state and the output weight. The output weight is optimized by minimizing the mean-square error between target value and output value through using the ridge regression algorithm.The results demonstrate that time delayed photonic RC based on semiconductor laser can forecast the trajectory of chaotic laser in about 2 ns. Moreover, we also investigate the influence of critical parameters on prediction result, including the type of the mask, the quantity of the virtual nodes, the length of the training data, the input gain, the feedback strength, the injection strength, the ridge parameter and the leakage rate.The method used here in this work has many attractive advantages, such as simple configuration, low training cost and eminently suitable for hardware implementation. Although the prediction length is limited, the significant innovation using time delayed photonic RC based on semiconductor lasers as the prediction system of chaotic laser presents a new opportunity for further developing a technique for predicting chaotic laser. Keywords:reservoir computing/ prediction/ chaotic laser/ machine learning
其中的符号含义与(1)式和(2)式相同. 此外, χ(t)表示均值为0、方差为1的高斯白噪声, 用于模拟自发辐射噪声. β是自发辐射噪声的强度, 仿真中取β = 10–6. 通过调节反馈强度${k}_{\rm{f}}'$、反馈延迟τ′和偏置电流Ibias三个参数变量, 可以获得丰富的动态特性. 图2(a) 给出了当Ibias = 1.2Ith和τ' = 1 μs时, 通过扫描反馈强度${k}_{\rm{f}}'$得到的半导体激光器输出的分岔图. 图中, 对于较小的${k}_{\rm{f}}'$, 激光器稳定激射; 随着${k}_{\rm{f}}'$的增加, 出现了一系列的倍周期分岔和混沌效应. 本文选取${k}_{\rm{f}}'$ = 0.054时的混沌激光, 减去其均值后作为预测任务的输入信号, 采样频率为100 GHz. 图2(b) 给出了一段混沌激光时序及其预测值. 当PL < 2 ns (黑色虚线左侧)时, 目标信号和预测值是重叠的, 且NMSE (PL) < 0.1, 表明实现了良好的预测效果. 图 2 (a) 激光器输出强度的分岔图; (b) 混沌激光目标信号及其预测值 Figure2. (a) Bifurcation diagram of the output intensity of the laser; (b) chaotic laser target signal together with the predicted values.
图3给出了系统参数与平均预测长度(PL)的关系曲线. 在每个参数值可调范围内, 计算10次实现的平均值, 其他参数保持表1中的参考值不变. 平均值的标准偏差在趋势图中用竖线表示. 图 3 (a) 在不同掩模类型和不同节点数的情况下, 预测长度(PL)随训练长度(Ts)变化的趋势图; (b) 在使用混沌掩模信号且节点数为800的情况下, 预测长度(PL)随输入增益(Gin)变化的趋势图; 虚线为拟合曲线 Figure3. (a) PL as a function of the length of the training data (Ts) under different type of masks and the number of nodes; (b) PL as a function of the input gain (Gin) under N = 800 with the chaos mask signal. The dotted lines represent the associated fitting curves.
图3(a) 为在不同类型掩模和不同节点数的情况下, 预测长度(PL)随训练长度(Ts)变化的趋势图, 包括三种情况: 混沌掩模信号且节点数为800(黑色正方形)、二值掩模信号且节点数为800 (红色圆圈)、混沌掩模信号且节点数为400 (蓝色三角形). 总的来看, 随着训练长度的增加, 预测能力逐渐增强然后趋于稳定, 这表明实现良好的预测性能需要充分的训练数据. 在这三种方案中, PL值分别达到1.0, 1.5和2.0 ns. 通过对比红色圆圈和黑色正方形的曲线, 由于使用混沌掩模信号, 储备池产生更复杂的动态响应来更好地执行预测任务[26]. 比较黑色正方形和蓝色三角形的曲线可以看出, 虚拟节点的增加同样可以优化系统预测性能. 考虑到系统运行时间与虚拟节点的数目成正比, 并且在节点数为800的基础上增加虚拟节点数目不能进一步增加预测长度(未示出). 所以本文选择了节点数为800的混沌掩模信号. 图3(b)给出了预测长度(PL)随输入增益(Gin)变化的趋势图. 随着输入增益的变化, 预测长度先增加后降低, 在Gin = 1.5时达到最大. 输入增益的作用是对输入信号进行缩放, 以适应储备池非线性的输入范围. 图4(a) 给出了反馈强度(kf)和注入强度(kinj)对预测长度(PL)影响的二维图. 不同的颜色对应不同的PL值, 红色区域的预测长度达到2 ns. 图4(b)和图4(c)为在(kinj, kf) = (0.06, 0.18)的情况下, 无调制信号和加载调制信号时R-laser的时序. 在没有调制信号的情况下, 储备池是以单周期状态运行; 当载入调制数据, 储备池表现为复杂的瞬态动力学. 如文献[8]所述, RC需要满足两个基本属性: 不同的输入映射到足够不同的储备池状态(差异性), 而相似的输入映射到足够相似的储备池状态(近似性). 储备池应在适当的动态范围内运行, 以满足差异和近似特性. 这种动态范围可以被描述为一个单一的周期状态, 接近激光动力学系统的中性稳定性(也称为边缘混沌)[26]. 图 4 (a)预测系统在不同反馈强度(kf)和注入强度(kinj)的参数空间中PL值的二维图; (b), (c) 在(kinj, kf) = (0.06, 0.18)的条件下, 无调制信号和有调制信号时R-laser的输出强度时序 Figure4. (a) Two-dimensional map of the PL values of prediction system in the parameter space of the different feedback strength (kf) and the injection strength (kinj); (b), (c) temporal traces of the R-laser under (kinj, kf) = (0.06, 0.18) without and with modulated input data.
图5(a)为预测长度(PL)随泄漏率(δ)变化的趋势图. 在输出层, 每个记录的储备池状态Xt (t = 1, 2, 3, ···, T; T代表输入数据量)都包含上一时刻的储备池状态Xt –1[30], 计算公式为Xt = δXt –1 + (1 – δ)f (GinWinu(n)). 其中f (·)表示储备池的非线性映射, 泄漏率δ表示上一时刻的储备池状态与当前储备池状态的比值. 从图5(a)可以看出, PL的最高值在δ = 0.25时获取. 泄漏率越小, 储备池更新速度越快. 图5(b)为预测长度(PL)随岭参数(λ)变化的趋势图. 岭参数影响输出权值的训练结果, λ ≤ 10–6时系统性能稳定; 当λ > 10–6时, 系统性能逐渐变差. 岭回归算法通过放弃系统的无偏性来增大其数值稳定性, 提高了数据处理的精度和效率[29]. 图 5 (a) 预测长度(PL)随泄漏率(δ)变化的趋势图; (b) 预测长度(PL)随岭参数(λ)变化的趋势图; 虚线为拟合曲线 Figure5. (a) PL as a function of the leakage rate (δ); (b) PL as a function of the Ridge parameter (λ). The dotted lines represent the associated fitting curves.
 图 1 基于半导体激光器的时延储备池计算系统示意图
图 1 基于半导体激光器的时延储备池计算系统示意图








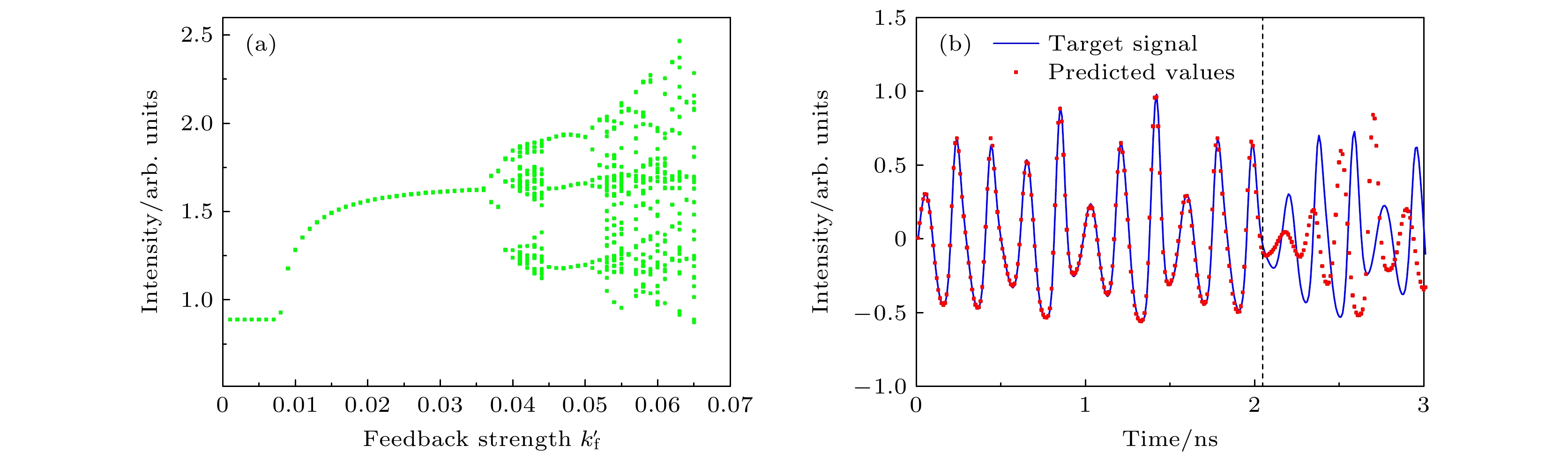 图 2 (a) 激光器输出强度的分岔图; (b) 混沌激光目标信号及其预测值
图 2 (a) 激光器输出强度的分岔图; (b) 混沌激光目标信号及其预测值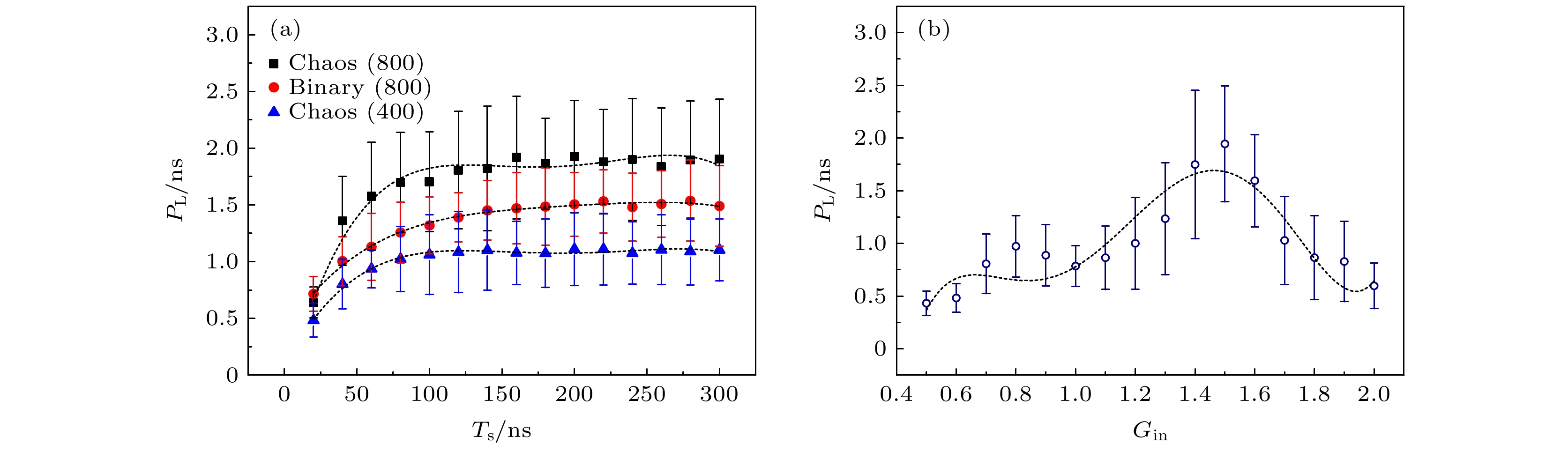 图 3 (a) 在不同掩模类型和不同节点数的情况下, 预测长度(PL)随训练长度(Ts)变化的趋势图; (b) 在使用混沌掩模信号且节点数为800的情况下, 预测长度(PL)随输入增益(Gin)变化的趋势图; 虚线为拟合曲线
图 3 (a) 在不同掩模类型和不同节点数的情况下, 预测长度(PL)随训练长度(Ts)变化的趋势图; (b) 在使用混沌掩模信号且节点数为800的情况下, 预测长度(PL)随输入增益(Gin)变化的趋势图; 虚线为拟合曲线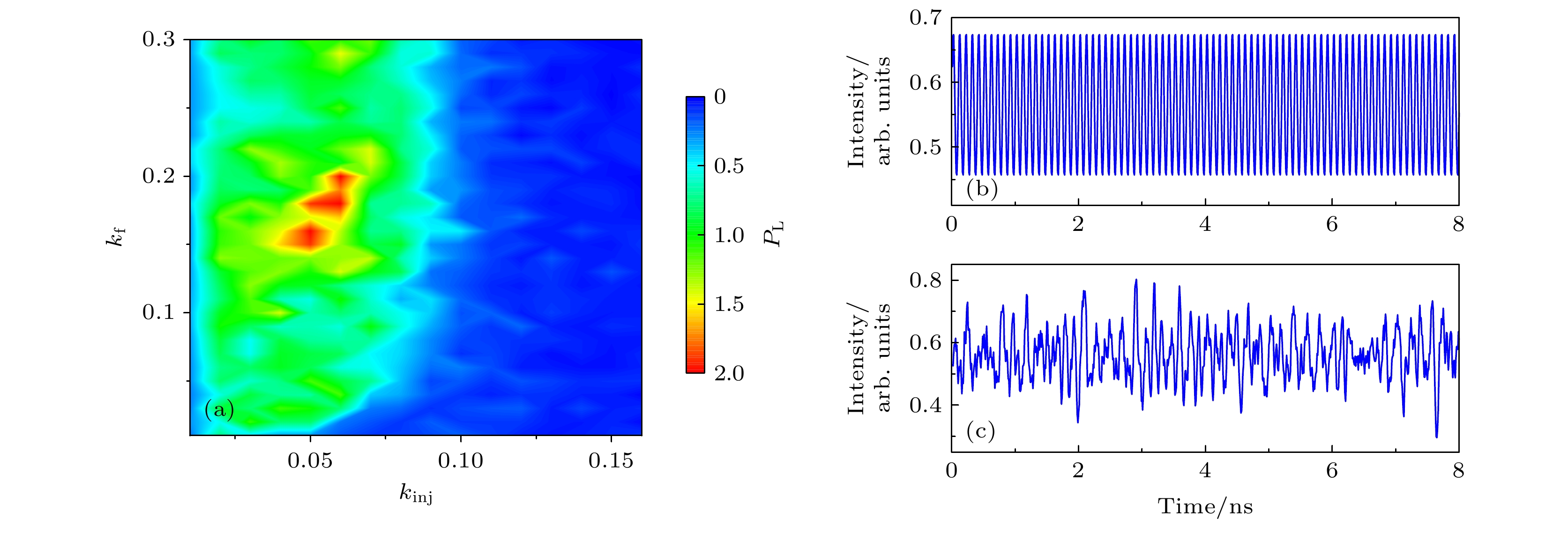 图 4 (a)预测系统在不同反馈强度(kf)和注入强度(kinj)的参数空间中PL值的二维图; (b), (c) 在(kinj, kf) = (0.06, 0.18)的条件下, 无调制信号和有调制信号时R-laser的输出强度时序
图 4 (a)预测系统在不同反馈强度(kf)和注入强度(kinj)的参数空间中PL值的二维图; (b), (c) 在(kinj, kf) = (0.06, 0.18)的条件下, 无调制信号和有调制信号时R-laser的输出强度时序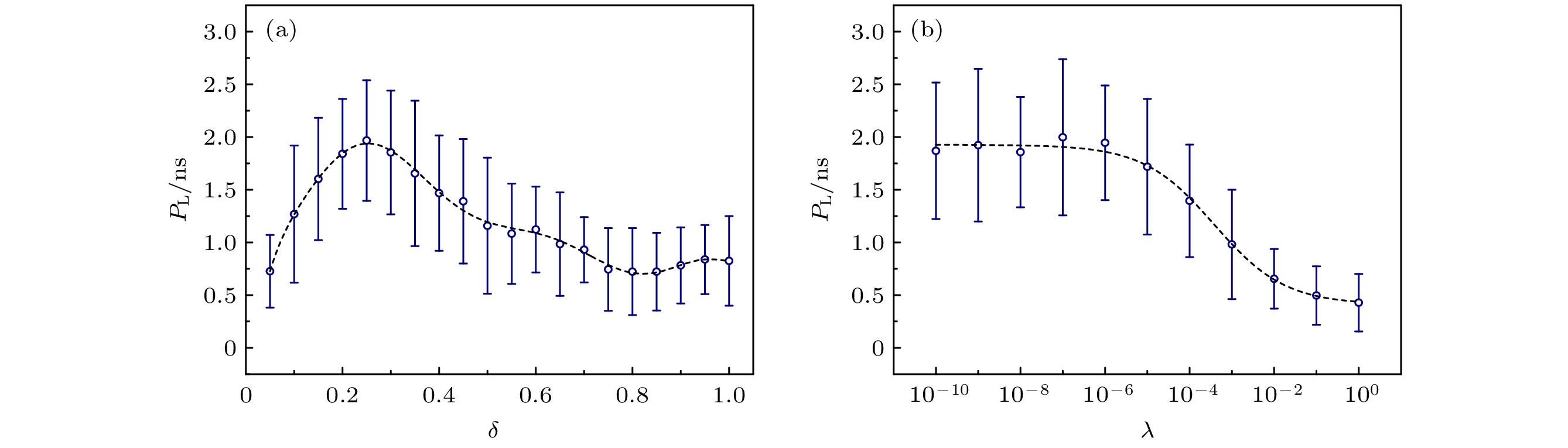 图 5 (a) 预测长度(PL)随泄漏率(δ)变化的趋势图; (b) 预测长度(PL)随岭参数(λ)变化的趋势图; 虚线为拟合曲线
图 5 (a) 预测长度(PL)随泄漏率(δ)变化的趋势图; (b) 预测长度(PL)随岭参数(λ)变化的趋势图; 虚线为拟合曲线