全文HTML
--> --> -->2011年, 电子科技大学张洪敏等[11]对载波调制激光雷达水下目标探测系统进行了仿真, 仿真表明载波调制激光雷达技术对深海目标探测结果有明显改善, 海水参数和调制参数对探测性能有较大影响. 2014年, Illig等[12]采用直接调制的方式, 获得了50 mW的442 nm调制激光, 调制频率50—550 MHz. 采用该激光源搭建水下目标探测系统, 采用光电倍增管作为探测器, 利用频域反射法获得了10.2个衰减长度的精确测量, 然后利用盲信号分离技术, 将探测距离提高到了14.7个衰减长度. 2016年, 太原理工大学张明涛等[13]采用混沌调制激光雷达进行水下测距, 在1.5 m长的水箱中实现了最大1.36 m的探测距离, 平均测距误差为2.3 cm. 2020年, 北京空间机电研究所的沈振民等对混沌脉冲激光雷达和相干双频脉冲激光雷达进行了理论分析, 分别在清水和浊水中测量了水箱中51 cm位置处的反射镜距离, 测距结果分别为54.5和59.0 cm[14]. 强度调制绿光激光是水下载波调制激光雷达的光源, 目前用于激光水下探测的啁啾强度调制光源多为几十毫瓦量级, 功率较低. 由于水对激光的衰减, 激光水下探测回波信号十分微弱, 给信号的采集和处理带来了难度.
本文采用马赫曾德尔电光调制器对单频1064 nm激光进行强度调制, 经过光纤功率放大器后倍频, 获得了2.56 W的强度调制绿光, 调制范围10 MHz—2.1 GHz. 调制频率为100 MHz时, 调制深度为0.91, 调制频率为300 MHz时频率误差约为1.2 Hz@5 min. 利用设计的激光器作为探测源, 高速硅探测器作为接收器, 搭建水下目标探测系统. 通过在3 m长的水箱中添加氢氧化镁(Mg(OH)2)粉末来改变水体的衰减系数, 采用PIN探测器实现了距离为4.3个衰减长度目标的探测, 测距误差约12 cm. 由激光雷达方程知, 传输距离的平方与回波信号的功率成反比, PIN探测器和光电倍增管的噪声等效功率分别约为20 pW/Hz1/2和0.01 pW/Hz1/2, 原则上采用光电倍增管作为探测器探测距离可以提高45倍.
2.1.相位测距原理
相位法测距是将调制信号加载到激光上, 通过测量发射激光的调制信号和回波激光的调制信号之间的相位差来获得测量目标的距离信息[15].发射激光的调制信号为




接收到的回波激光的调制信号为




接收端和发射端之间的相位偏移为


对于相位法测距, 最大测量距离即为测尺长度, 因此采用单一测尺测距, 测量长度会有很大的局限性. 如果需要增大测量距离, 只能降低调制频率, 为了提高测量精度, 需要增大调制频率. 单个调制频率相位测距, 测量长度和测量精度无法同时满足, 因此通常采用多测尺法进行测量[16-18]. 分散的多测尺法是根据测量距离选择一个较低的调制频率, 保证测尺的长度, 然后采用较高的调制频率提高测量精度. 根据低频调制可以确定高频调制的相位延时的完整波长数N. 随着测量频率的提高, 测尺长度减小, 测量精度提高, 因此可以采用一组低频到高频的调制频率作为探测信号, 既可以测量较远的距离, 也可以保证测量精度. 集中的测尺法是采用两个集中的高频调制进行探测, 频率之间的差值作为测尺, 较高的调制频率保证测量精度, 也可以被称为双频测距[19].
2
2.2.相关运算原理
载波调制激光雷达技术是利用目标及水体散射对调制信号不同的响应将信号与散射噪声分离, 提高信噪比. 强度调制激光在水中传输时, 由目标直接反射的光子可以保持其强度调制信息, 而散射光子由于传输路径复杂, 不同距离的散射光相互叠加导致高频调制信号的消失. 通过测量回波信号的相位延时可以得到目标的距离, 而相位测量的精度直接决定测距精度. 相关运算法是利用相关函数进行数据分析的方法. 发射激光和接收激光的调制频率相同而具有相关性, 从而可以利用相关运算实现相位差的测量. 由于噪声信号与接收信号频率不同不具有相关性, 相关运算可以消除系统的随机噪声而提高信噪比[20].发射信号和接收信号的相关函数可以定义为[21]









 图 1 激光水下探测系统
图 1 激光水下探测系统Figure1. Experimental setup of underwater ranging.
将回波信号和参考信号做相关运算, 可以得到回波信号的延时时间, 进而得到目标的距离. 发射系统和接收系统是分离的, 间距约为6 cm, 而且视场重叠较小, 因此接收系统接收到的回波信号中后向散射信号较少, 目标信号的信噪比较高, 容易实现浑浊水体中目标的探测.
4.1.水的衰减系数测量
光在水中的衰减遵循比尔-朗伯定律, 将水箱中的目标放置在x1和x2处, 则回波的强度分别为


Mg(OH)2粉末难溶于水, 通过在水中添加Mg(OH)2粉末可以改变水的衰减系数, 从而可以在不同的水体中测量目标的距离. 把水箱入射窗口的内表面作为距离零点, 不同水的衰减系数测量结果如表1所示. 由于实验室的自来水使用频率不高, 在水箱中呈黄绿色, 样本1为实验室的自来水静置24 h以上的水体. 采用源恒通(WGZ-400AS)浊度计, 量程0—400 NTU, 精度0.1 NTU, 静置前测量三次的平均浊度为11.3 NTU, 静置后测量三次的平均浊度为11.2 NTU, 水体比较稳定. 在样本1水体中分别测量0, 0.5, 1.0和1.5 m处回波激光的功率, 以0 m处为基准计算不同距离水的衰减系数分别为0.98, 0.99和1.00 m–1, 平均衰减系数为0.99 m–1.
| 样本 | 目标距 离/m | 回波信号 强度/mW | 衰减系 数/m–1 | 平均衰减 系数/m–1 |
| 1 | 0 | 160 | — | 0.99 |
| 0.50 | 60 | 0.98 | ||
| 1.00 | 22 | 0.99 | ||
| 1.50 | 8 | 1.00 | ||
| 2 | 0 | 261 | — | 1.72 |
| 0.50 | 47 | 1.71 | ||
| 0.80 | 17 | 1.71 | ||
| 1.00 | 8 | 1.74 | ||
| 3 | 0 | 216 | — | 2.97 |
| 0.20 | 68 | 2.89 | ||
| 0.30 | 35 | 3.03 | ||
| 0.50 | 11 | 2.98 | ||
| 4 | 0 | 230 | — | 4.03 |
| 0.20 | 47 | 3.97 | ||
| 0.25 | 30 | 4.07 | ||
| 0.40 | 9 | 4.05 |
表1不同水体的衰减系数
Table1.Attenuation coefficient of different water.
在样本1中添加Mg(OH)2粉末, 打开水箱中的循环泵, 使Mg(OH)2粉末在水中充分扩散, 再次测量不同距离处水的衰减系数. 当添加Mg(OH)2颗粒较多, 水的衰减系数较大时, 目标距离较远的回波信号功率较低, 测量误差较大, 因此在较近的距离内测量回波激光的功率. 由于水箱中循环水泵的作用, 水中悬浮的Mg(OH)2颗粒充分均匀, 认为水箱中各处的衰减系数一致. 4个水体样本的平均衰减系数分别为0.99, 1.72, 2.97和4.03 m–1, 单位衰减长度对应的距离分别为1.01, 0.58, 0.34和0.25 m.
2
4.2.相位法水下目标距离测量
采用示波器采集调制信号和回波信号的波形, 同时对两个通道进行数据采集. 把水箱入射窗口的内表面作为距离零点, 水的衰减系数为0.99 m–1, 激光的调制频率为50 MHz时, 回波信号和参考信号的波形如图2(a)所示, 将回波信号和参考信号做相关运算, 结果如图2(b)所示, 峰值对应时间为–0.48 ns. 把目标移动到水中0.5 m的位置, 回波信号和参考信号的波形如图2(c)所示, 将回波信号和参考信号做相关运算, 结果如图2(d)所示, 峰值对应时间为4.158 ns. 水的折射率为1.333@532 nm, 调制频率为50 MHz, 在水中的测尺长度为2.251 m. 0.5 m的距离在一个测尺之内, 则两个位置之间的延时时间为4.638 ns, 距离为0.522 m, 测距误差为2.2 cm. 目标距离的标定为固定在水箱上精度为1 mm卷尺的测量结果, 因此测量误差为激光测距和卷尺测距之间的差值.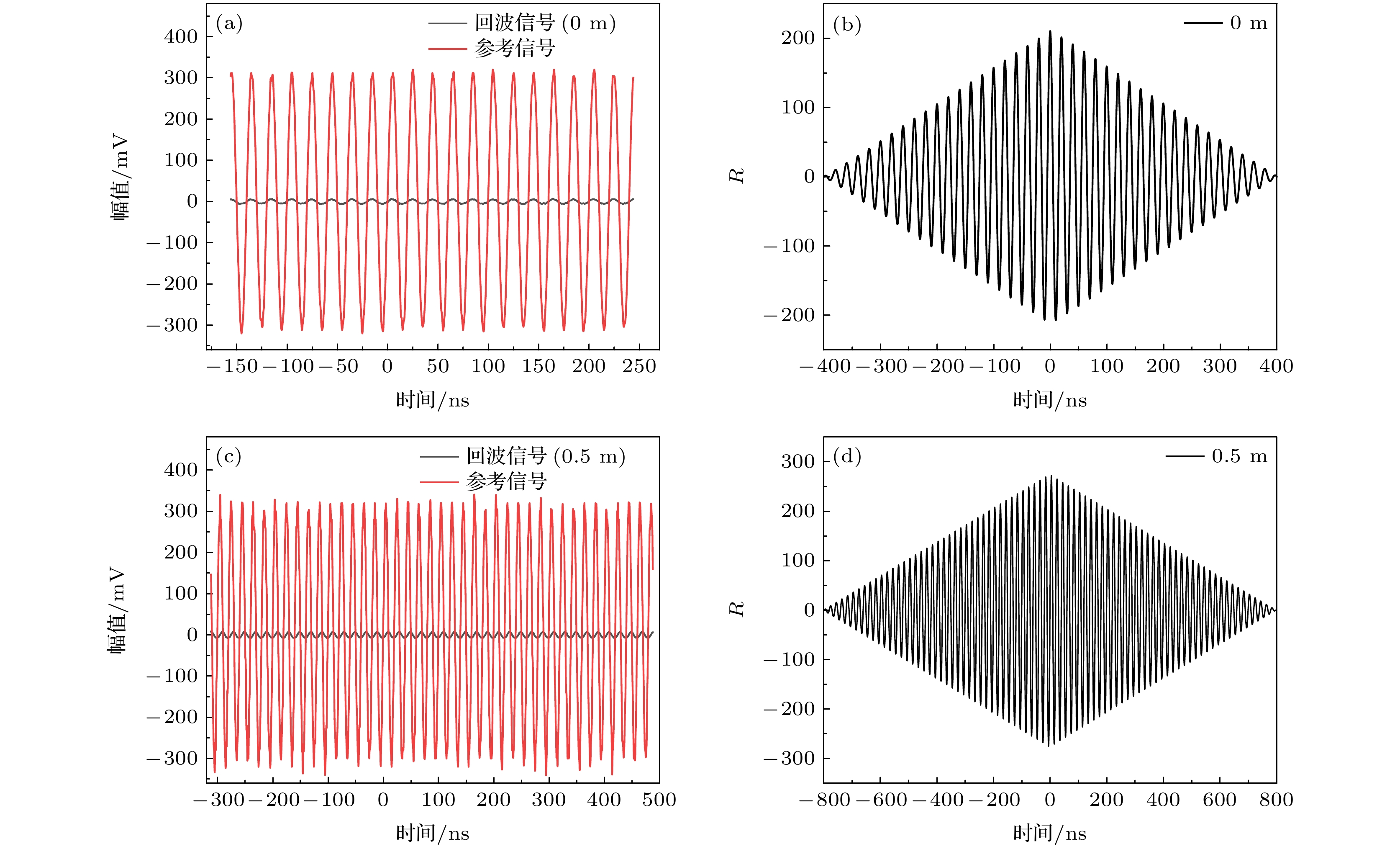 图 2 回波信号和参考信号的波形及相关运算结果 (a), (c) 0和0.5 m处的波形; (b), (d) 0和0.5 m处的相关结果
图 2 回波信号和参考信号的波形及相关运算结果 (a), (c) 0和0.5 m处的波形; (b), (d) 0和0.5 m处的相关结果Figure2. Waveform of echo signal and reference signal, results of correlation calculation: (a), (c) Waveform at 0 and 0.5 m; (b), (d) results of correlation calculation at 0 and 0.5 m.
水的衰减系数为0.99 m–1, 分别把目标放置在0.5, 1.0, 1.5, 2.0和2.5 m的位置, 采用相位法测距, 每个位置采集五组数据, 不同调制频率下的测距结果如图3所示. 调制频率分别为50, 100, 200, 300, 400和500 MHz, 在水中对应的测尺长度约为2.251, 1.125, 0.563, 0.375, 0.281和0.225 m. 调制频率为50 MHz的测尺基本可以覆盖水箱中的测量距离, 2.5 m位置处的测量结果需要补全一个测尺长度. 调制频率增大, 测尺减小, 测尺长度小于测量长度时可以根据调制频率为50 MHz的测距结果补全相应倍数的测尺长度. 图3(f)为不同距离不同调制频率的测距误差, 随着测量距离的增大, 测量误差增大, 最高达到了7.45 cm. 同一距离, 调制频率越高, 测距误差越小.
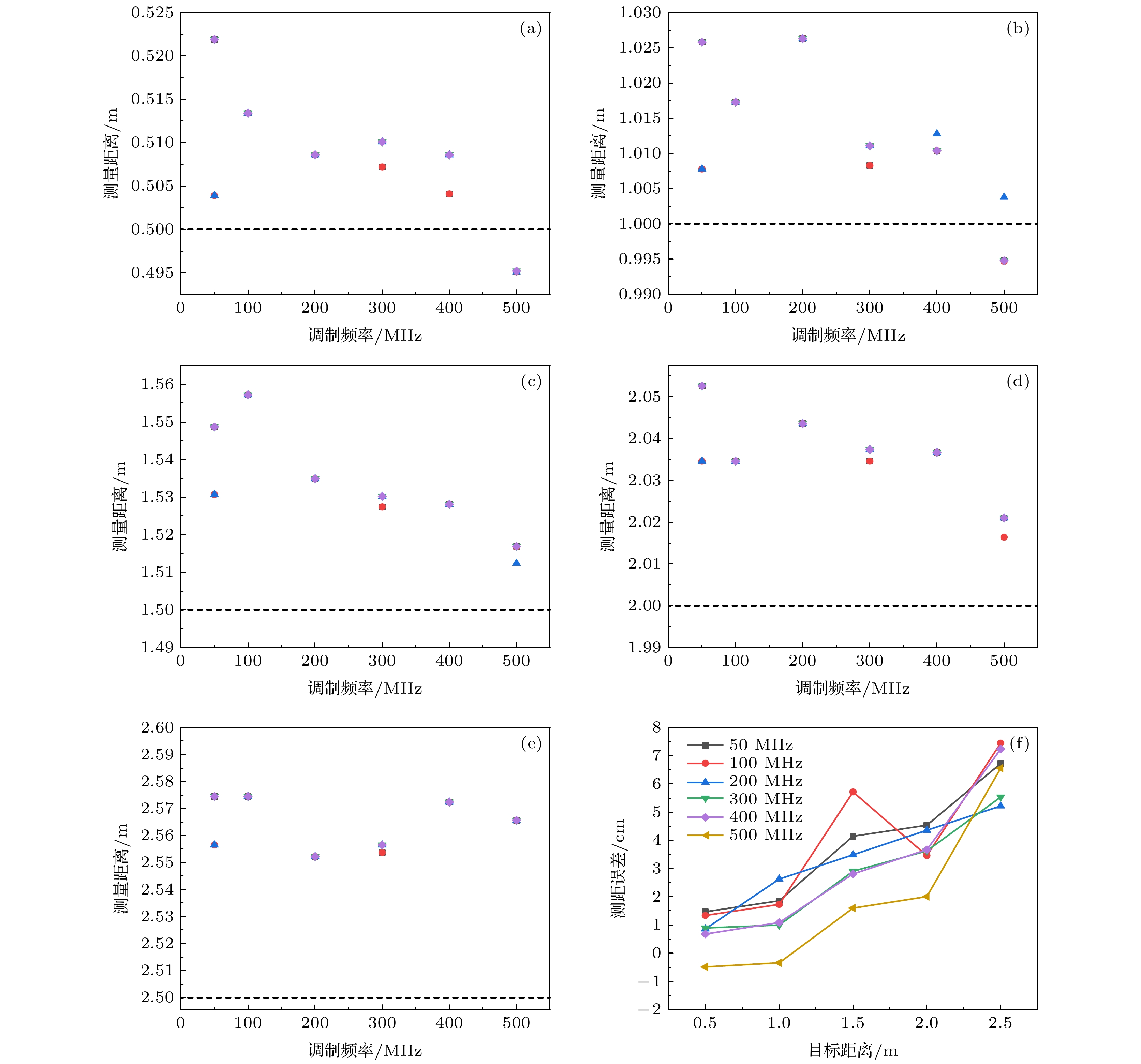 图 3 不同距离的测距结果及误差(c = 0.99 m–1) (a) 0.5 m; (b) 1.0 m; (c) 1.5 m; (d) 2.0 m; (e) 2.5 m; (f) 测距误差
图 3 不同距离的测距结果及误差(c = 0.99 m–1) (a) 0.5 m; (b) 1.0 m; (c) 1.5 m; (d) 2.0 m; (e) 2.5 m; (f) 测距误差Figure3. Ranging results and errors at different distances (c = 0.99 m–1): (a) 0.5 m; (b) 1.0 m; (c) 1.5 m; (d) 2.0 m; (e) 2.5 m; (f) ranging error.
水的衰减系数为1.72 m–1, 调制频率分别为50, 100, 200, 300, 400和500 MHz, 采用相位法测量不同位置的距离, 测距结果如图4(a)—(e)所示. 当测量距离较近时同一调制频率同一目标的多次测量结果一致性较好. 如图4(e)所示, 多次测量结果比较分散, 与图3(e)相比, 水的浑浊度提高, 测距结果波动增大; 与图4(a)—(d)相比, 测量距离增大, 测距结果波动增大. 图4(f)表明了不同距离不同调制频率的测距结果, 随着测量距离的增大, 测量误差也增大, 最高达到了约12 cm. 由于水的浑浊度增加, 测距误差整体增大. 目标距离为2.5 m时, 调制频率为500 MHz的测距误差明显小于低频调制时的测距误差, 调制频率越高, 测距精度越高.
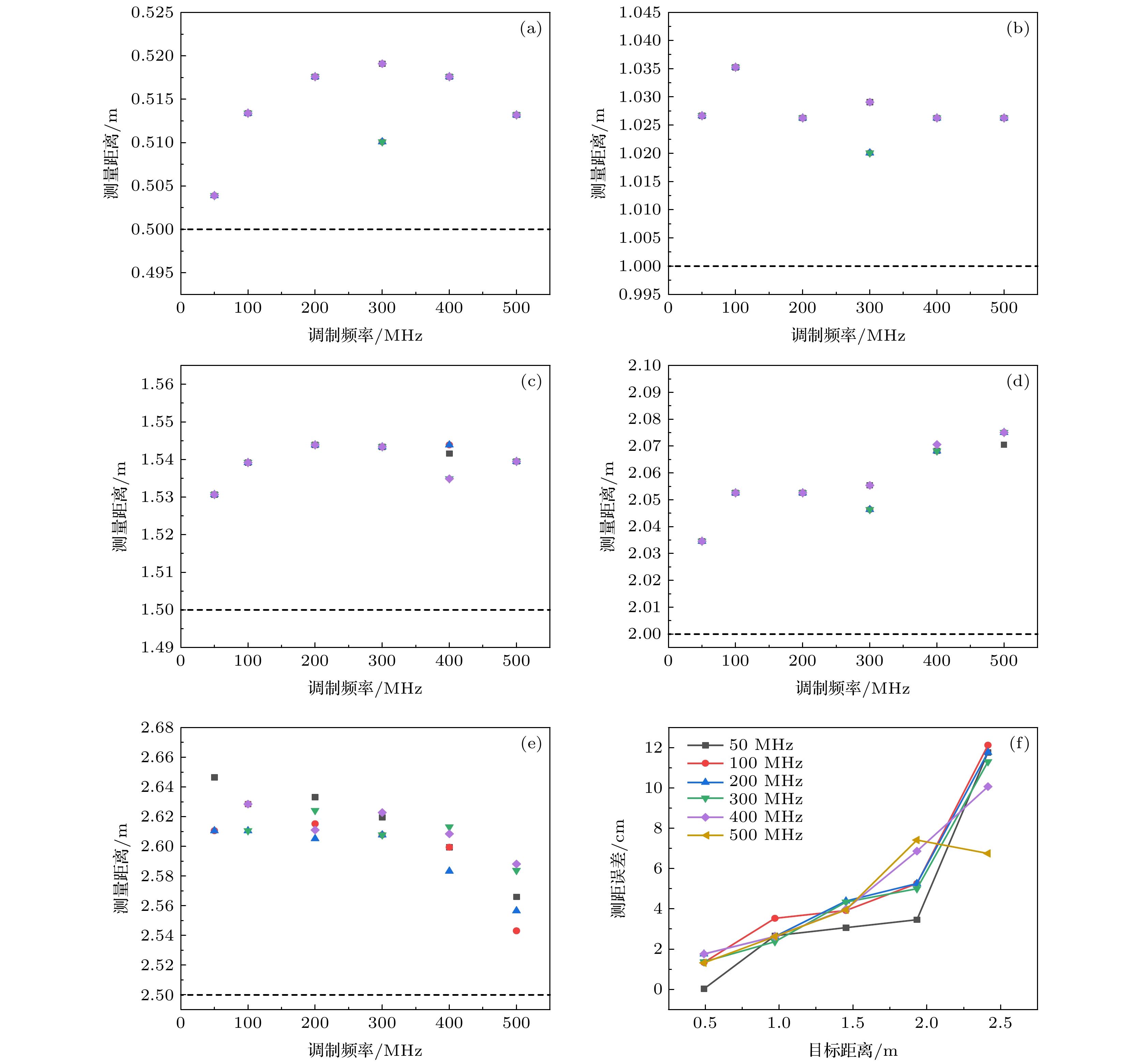 图 4 不同距离的测距结果及误差 (c = 1.72 m–1) (a) 0.5 m; (b) 1.0 m; (c) 1.5 m; (d) 2.0 m; (e) 2.5 m; (f) 测距误差
图 4 不同距离的测距结果及误差 (c = 1.72 m–1) (a) 0.5 m; (b) 1.0 m; (c) 1.5 m; (d) 2.0 m; (e) 2.5 m; (f) 测距误差Figure4. Ranging results and errors at different distances (c = 1.72 m–1): (a) 0.5 m; (b) 1.0 m; (c) 1.5 m; (d) 2.0 m; (e) 2.5 m; (f) ranging error.
相位测距的整体测量结果如图5所示, 目标最大距离为4.3个衰减长度 (a.l.)时, 测距结果约为4.5个衰减长度. 随着测量距离的增加, 测距误差增大, 测量结果向远处偏移. 水的浑浊度增加, 探测距离增大, 探测系统接收到的噪声信号越多, 信噪比降低, 从而导致了测距误差增大. 通过在接收端加一个以调制频率为中心的窄带滤波器可以进一步分离散射信号, 提高信噪比. 探测源的调制频率为10.0 MHz—2.1 GHz, 因此通过继续提高探测激光的调制频率可以进一步提高测量精度, 实现近距离内高精度的测量.
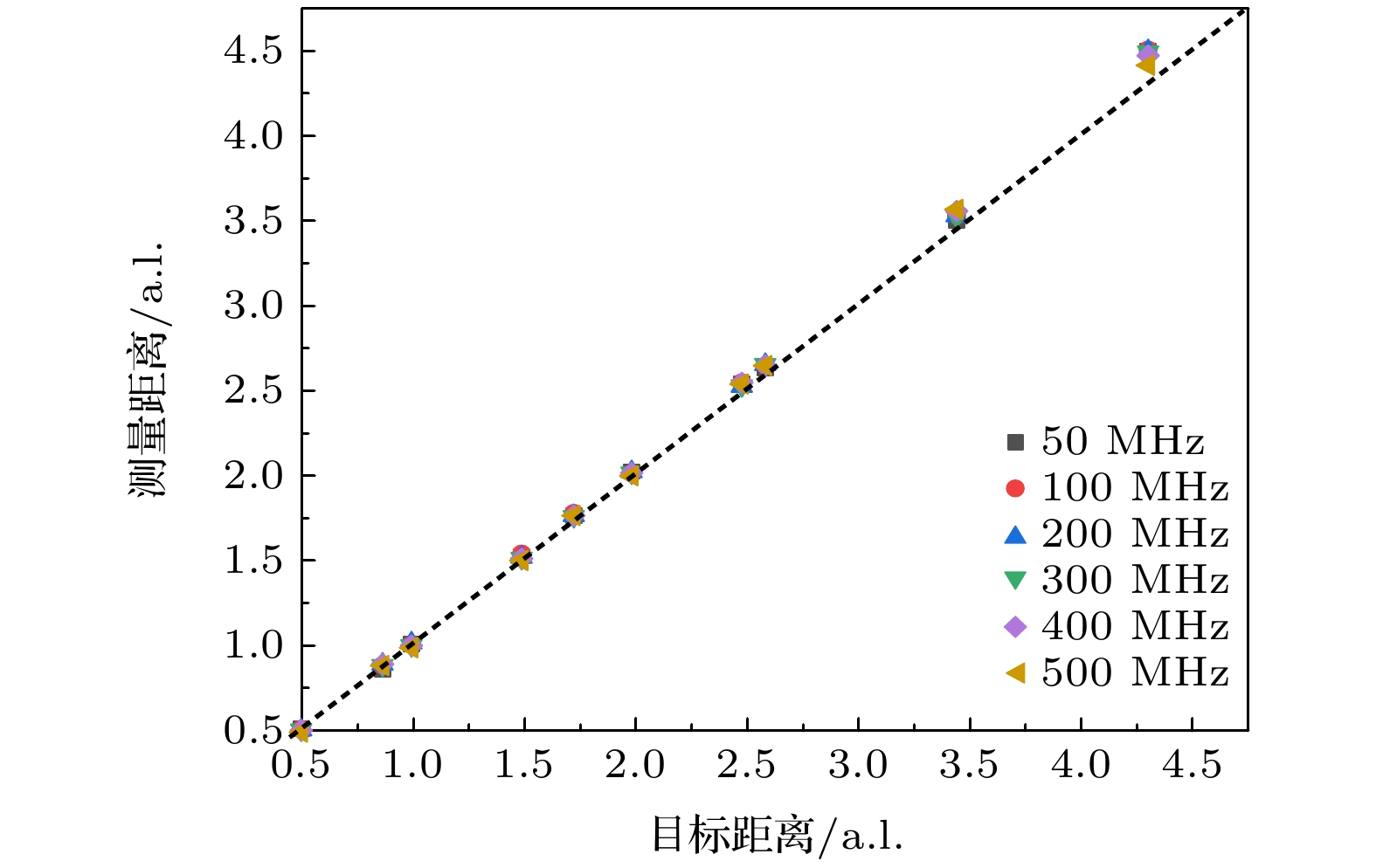 图 5 相位法测距结果
图 5 相位法测距结果Figure5. Ranging results based on phase.
