1.College of Physics and Electronic Engineering, Northwest Normal University, Lanzhou 730000, China 2.College of Computer Science and Engineering, Northwest Normal University, Lanzhou 730000, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61561044)
Received Date:21 June 2020
Accepted Date:11 September 2020
Available Online:04 January 2021
Published Online:20 January 2021
Abstract:Kernel adaptive filters are a class of powerful nonlinear filter developed in reproducing kernel Hilbert space (RKHS).The Gaussian kernel is usually the default kernel in KAF algorithm, because the Gaussian kernel has the universal approximation. However, in previous research the kernel adaptive filtering algorithms were mostly based on mean square error criterion and assumed to be in a Gaussian noise environment. When environmental noise is changed, the performance of conventional kernel adaptive filtering algorithm based on mean square error criterion is seriously reduced to failure due to the interference of non-Gaussian noise and the influence of inappropriate non-Gaussian modeling. Therefore, it is important to develop a new method of suppressing the noise of non-Gaussian signals. In this paper, a new kernel fractional lower power adaptive filtering algorithm is proposed by combining the benefits of the kernel method and a new loss function which is robust against non-Gaussian impulsive interferences and has fast convergence under a similar stability condition. The proposed SP-KFLP algorithm generates a new framework of cost function which combines the Softplus function with the KFLP algorithm by updating its weight vector according to the gradient estimation while nonlinear saturation characteristics of output error are used. Compared with the features of sigmoid function the features of the Softplus function guarantee the SP-KFLP an excellent performance for combatting impulsive interference and speeding up the convergence rate. In the kernel fractional low power criterion the reciprocal of the system error is used as the coefficient of the weight vector update formula, and the method of error burst is used to make the weight vector not update to resist the impulse noise. The mean square convergence analysis for SP-KFLP is conducted, and a sufficient condition for guaranteeing convergence is therefore obtained by using the energy conservation relation. The proposed algorithm is very simple computationally. Simulations in a system identification show that the proposed SP-KFLP algorithm outperforms the kernel least-mean-square algorithm, kernel fractional lower power algorithm, and sigmoid kernel fractional lower algorithm in terms of convergence rate and the robustness of against impulsive interference. The proposed algorithm improves not only the capability of resisting impulsive interference, but also the convergence rate. In other words, the contradiction between convergence and tracking performance stability is well taken into account, and the performance under Gaussian noise is also better than the performance of the traditional kernel adaptive algorithm. Keywords:kernel adaptive filtering algorithm/ Softplus function/ kernel fractional low power error criterion/ non-Gaussian impulse interference
为了获得合适的p值, 首先考察不同的p值对SP-KFLP算法性能的影响, 实验假设存在非高斯冲激噪声干扰, 令${p_{\rm{q}}} = 0.01$. p分别取0.9, 0.8, 0.7, 0.6时SP-KFLP算法的归一化学习曲线如图2所示. 图 2 非高斯噪声下, 不同p值的SP-KFLP算法归一化学习曲线对比 Figure2. Comparison of normalized learning curves of SP-KFLP algorithm with different p values under non-Gaussian noise.












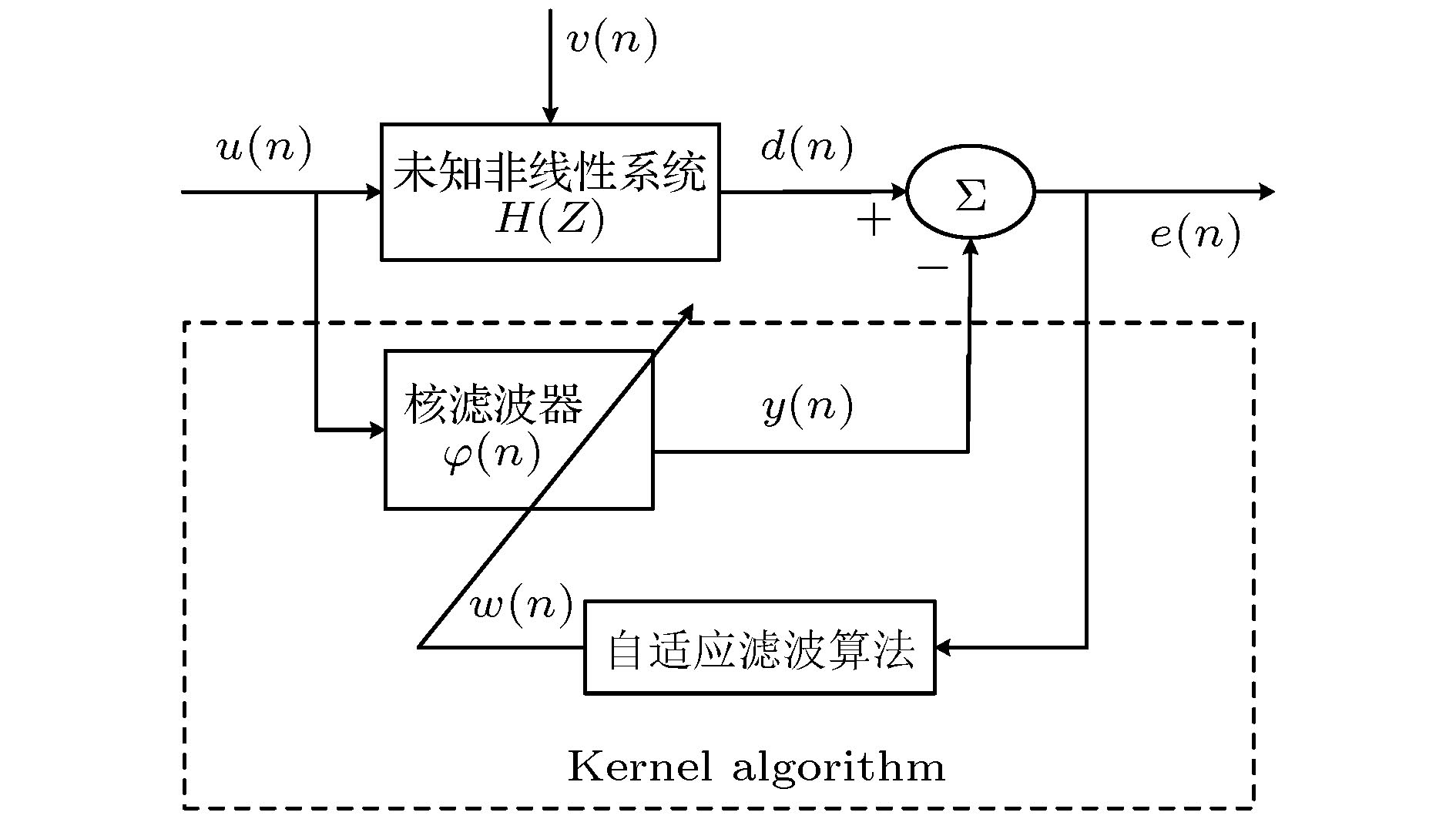 图 1 系统识别模型
图 1 系统识别模型








































 图 2 非高斯噪声下, 不同p值的SP-KFLP算法归一化学习曲线对比
图 2 非高斯噪声下, 不同p值的SP-KFLP算法归一化学习曲线对比




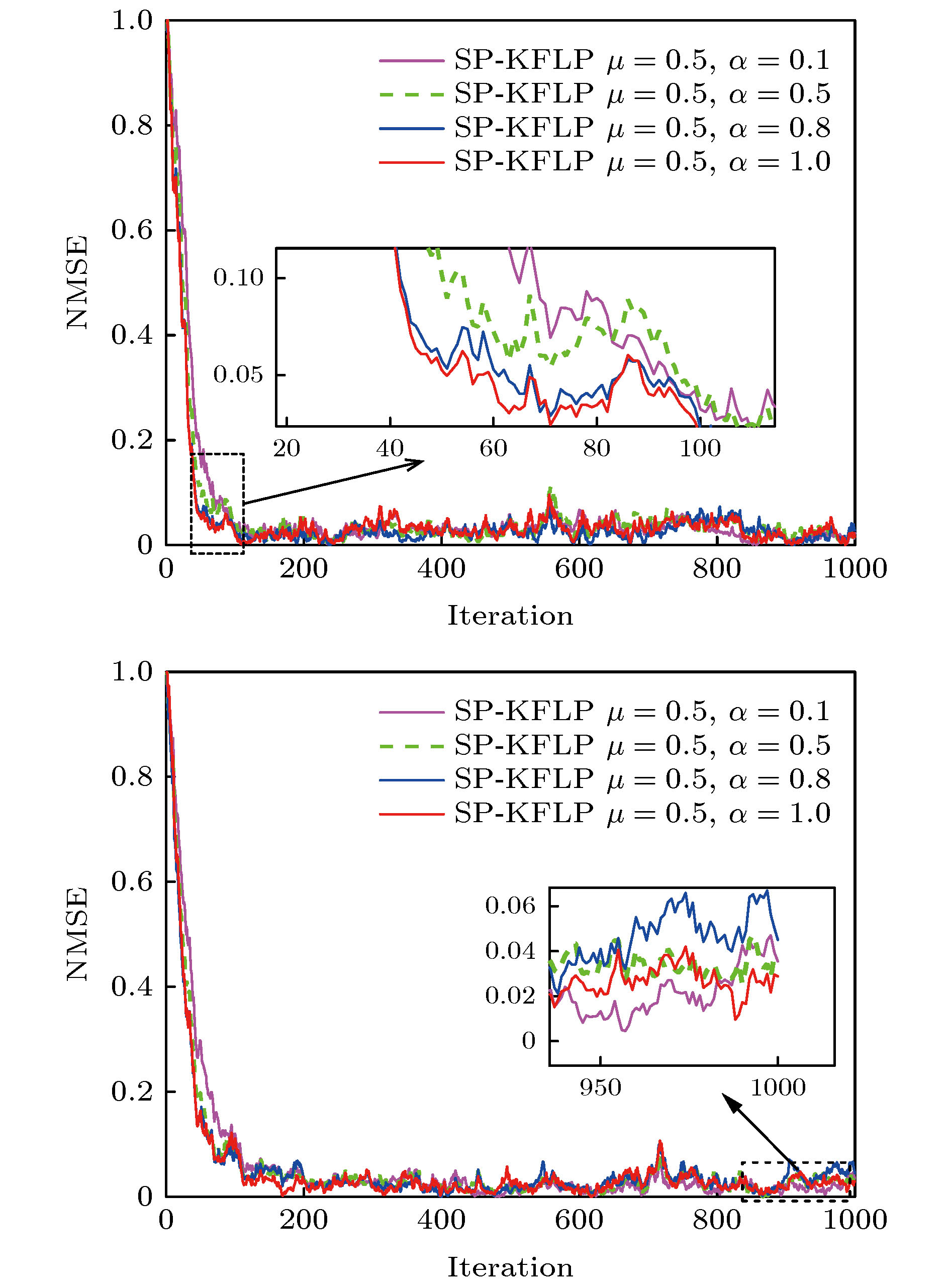 图 3 不同
图 3 不同



 图 4 KLMS, KMCC, KFLP, S-FKLP和本文SP-KFLP算法的比较
图 4 KLMS, KMCC, KFLP, S-FKLP和本文SP-KFLP算法的比较

 图 5 非高斯干扰下的KFLP, KLMS, S-KFLP与SP-KFLP算法比较
图 5 非高斯干扰下的KFLP, KLMS, S-KFLP与SP-KFLP算法比较
 图 6 在第600次迭代过程中加入冲激噪声时各算法性能对比
图 6 在第600次迭代过程中加入冲激噪声时各算法性能对比