全文HTML
--> --> -->电磁-摩擦复合能量采集技术已被证明是实现振动能量高效获取与转换的有效途径[6-9]. 摩擦纳米发电机(TENGs)具有较高的输出电压, 但是输出电流只有微安级[10-11], 而电磁发电机(EMGs)的输出电流可达毫安级[12-15], 两者的组合可以满足较高能量转换的需求. 被誉为“纳米发电机之父”的王中林院士[16]首先提出“纳米能源”原创概念, 并将纳米能源推广为“新时代的能源, 即物联网、传感网络、大数据时代的分布式移动式能源”, 由此开启了人类能源模式新篇章. 2018年王中林院士团队[17]提出了一种具有内部拓扑结构的摩擦-电磁复合纳米发电机, 成功实现了两种发电原理的优势补偿. 其中电磁发电机在100 Ω的最优负载下, 峰值功率为4 mW, 摩擦发电机在的最优负载100 MΩ下, 峰值功率为0.5 mW. 2018年中北大学薛晨阳教授和丑修建教授团队[18]共同报道了一种用于收集水波能量的盒状摩擦-电磁复合纳米发电机. 在负载为100 MΩ时, TENG的瞬时最大输出功率为0.08 mW, 在1 kΩ的负荷下, EMG的瞬时最大输出功率为14.9 mW, 该复合纳米发电机可同时点亮60个发光二极管(LEDs). 2019年苏州大学孙立宁教授, 刘会聪教授与新加坡国立大学Chengkuo Lee教授[19]共同提出了一种旋转式电磁-摩擦电复合型能量采集器, 当驱动频率为2 Hz, 振幅为14 cm时, TENG和EMG的最大功率密度分别为3.25和79.9 W/m2, 证明了该装置从多方向和宽频率范围环境中获取能量的有效性; 2020年重庆大学牟笑静课题组[20]提出了一种基于混沌摆式的电磁-摩擦复合能量采集器, 摩擦发电机的最大瞬时功率为15.21 μW, 电磁发电机的最大瞬时功率为1.23 mW, 成功实现了自供电无线传感节点数据的远程传输.
虽然近年来基于电磁-摩擦复合式的振动能量收集技术已经取得了一些阶段性的进展, 但是其工程化应用依然面临着众多挑战: 1)现有的能源收集装置只有在较高频且规则振动环境中才有较好的输出, 而随机、不规则的环境振动往往处于超低频(<10 Hz), 因此高频谐振器件很难实现复杂的环境振动能量的高效获取与转换; 2)大多数能源收集装置采用具有较高摩擦阻力和较低灵敏度的滑动结构, 对于低频的微弱环境振动响应效果差; 3)虽然一些基于滚动起电的器件具有较高的鲁棒性, 较低的材料磨损, 但它们往往只能在固定的方向滚动, 针对复杂多变的环境振动很难实现较高的换能效率.
综合以上分析, 针对复杂多变的环境振动能量, 本文提出了一种非谐振式低频电磁-摩擦复合振动能量采集装置. 采用具有灵敏度高、鲁棒性强、可360°旋转俘能等特性的旋转陀螺结构, 结合电磁-摩擦工作原理, 使系统能够高效地俘获低频、不规则的环境振动能. 通过理论分析与软件仿真, 阐述了器件的工作原理; 基于线性电机平台, 系统地研究了振荡频率和幅度对器件输出性能的影响, 较好地证明了器件收集振动能量的能力. 在2 Hz的振动环境下, 摩擦发电单元在20 MΩ负载下的峰值功率为0.084 mW, 电磁发电单元在800 Ω负载下峰值功率为4.61 mW, 系统机电转换效率为0.45%. 将器件分别置于人体的腿部和手臂, 分析了复合能量收集器件对于人体简单运动能量的收集能力, 并结合能量存储单元, 实现了计步器自供能的正常工作. 本项研究不仅为低频振动能量的高效采集与转换提供了一个崭新的思路, 而且在自供电传感网络节点方面具有潜在应用价值.
2.1.结构模型
为了实现对波浪能的高效获取与转换, 本文提出了一种非谐振式低频电磁-摩擦复合振动能量收集器件, 其结构模型如图1(a)所示, 结构分解图如图1(b)所示. 其核心结构主要包括: 一个集自转与公转为一体的空心旋转陀螺(?35 mm × 40 mm), 4个1000匝的线圈(? 图 1 系统结构模型 (a)电磁-摩擦复合能量收集器模型图; (b) 复合能量收集器结构分解示意图; (c) 陀螺刨面图; (d), (e) 电磁-摩擦复合能量收集器的正反面照片
图 1 系统结构模型 (a)电磁-摩擦复合能量收集器模型图; (b) 复合能量收集器结构分解示意图; (c) 陀螺刨面图; (d), (e) 电磁-摩擦复合能量收集器的正反面照片Figure1. The structure model of the system: (a) The model diagram of the hybridized nanogenerator; (b) schematic diagram of structural decomposition of the hybridized nanogenerator; (c) the cross-section of the gyro; (d), (e) digital photograph of the TENG and EMG hybridized nanogenerator.
2
2.2.理论分析
本文所提出的基于旋转陀螺结构的滚动摩擦发电机模型可以等效为一个独立滚动摩擦层(FEP)与一些金属电极对(锡)之间的滚动摩擦起电过程. 每相邻的一对叉指电极与陀螺外层的摩擦材料(FEP)即可构成一个发电单元, 以一个发电单元为例详细阐述其起电原理, 如图2(a)所示. 当陀螺滚动到电极1上时, 由材料电负性可知, 金属锡相对FEP具有更强的正电荷亲和性[21], 因此会在电极1上积累一定数量的正电荷, 在FEP上积累相同数量的负电荷(图2(a) Ⅰ); 当陀螺在外界激励作用下从电极1向电极2上滚动时, 电极1上的正电荷将会通过外部电路由电极1流向电极2, 形成发电的前半周期(图2(a) Ⅱ); 当陀螺由电极1完全滚动到电极2上后, 电极1上的正电荷也全部转移至电极2上(图2(a) Ⅲ); 随后陀螺在外界激励的作用下继续滚动离开电极2, 电极2上的正电荷会通过外部电路回流到电极1, 从而在外部电路中产生反向电流(图2(a) Ⅳ). 因此当陀螺在外部激励的作用下, 在叉指电极上滚动时, 会产生交流发电过程. 采用COMSOL 5.3 a对图2(a)Ⅲ状态下的表面电势分布进行了仿真, 仿真结果如图2(b)所示.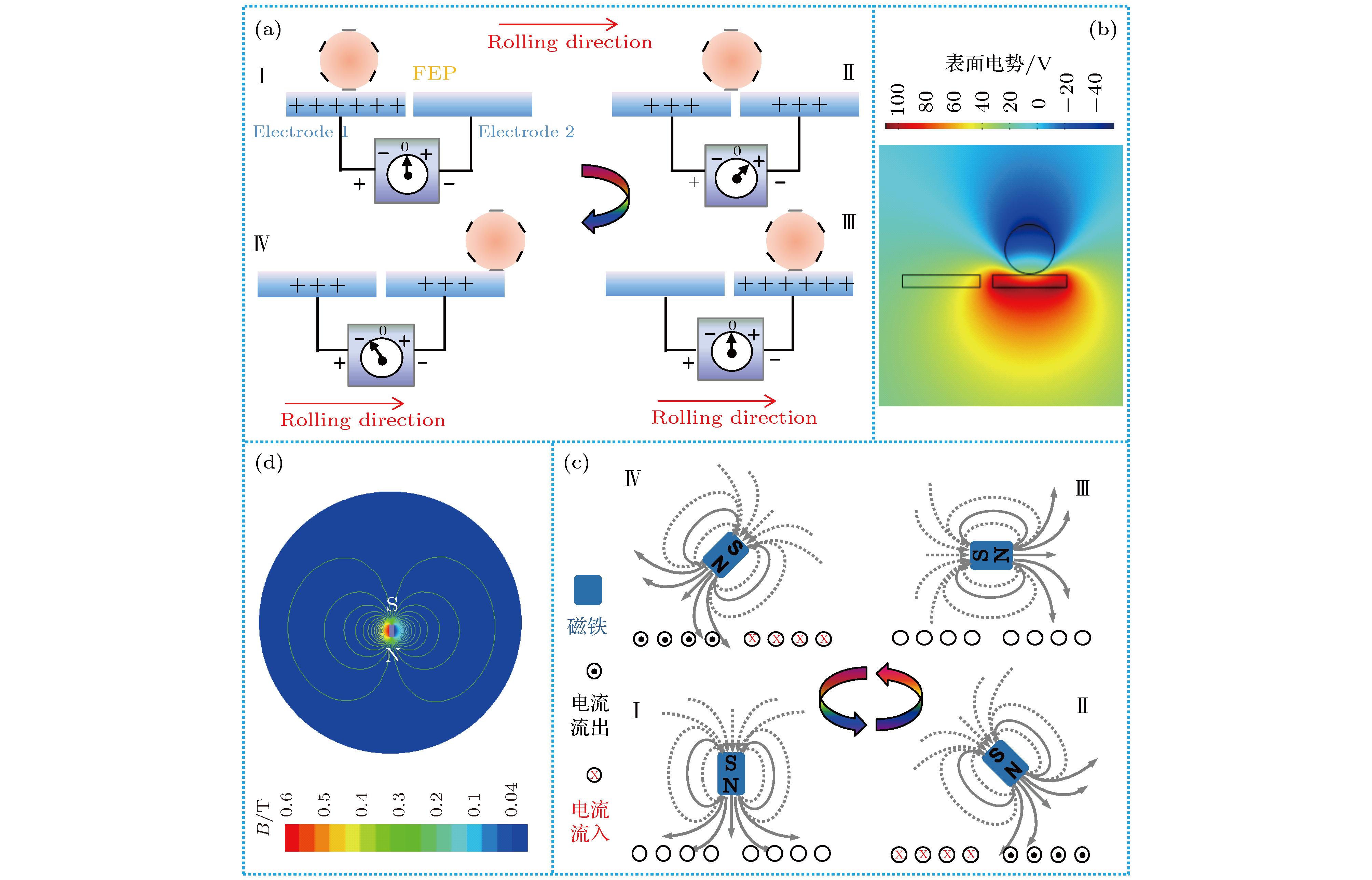 图 2 复合能量收集器的工作原理及其仿真 (a) 摩擦发电单元的工作原理; (b) 摩擦发电单元的仿真; (c)电磁发电单元的工作原理; (d) 电磁发电单元的其仿真
图 2 复合能量收集器的工作原理及其仿真 (a) 摩擦发电单元的工作原理; (b) 摩擦发电单元的仿真; (c)电磁发电单元的工作原理; (d) 电磁发电单元的其仿真Figure2. The operating principle and simulation of the hybridized nanogenerator: (a) The operating principle of the TENG; (b) the simulation of the TENG; (c) the operating principle of the EMG; (d) the simulation of the EMG.
电磁发电机的起电过程为: 当陀螺在外部激励下滚动时, 镶嵌在其内部的磁铁会随着其一起滚动, 从而导致线圈内部磁通量的变化, 由楞次定律可知, 线圈中将会产生感应电流来阻碍磁通量的变化, 以一个线圈为例, 详细阐述其起电过程, 如图2(c). 假设磁铁正对线圈时为初始状态, 此时线圈中没有感应电流(图2(c) Ⅰ); 当陀螺在外部激励下产生滚动时, 磁铁会随着陀螺的滚动远离线圈, 这时线圈内的磁通量将会减小, 因此线圈内将会产生一个顺时针方向的电流来阻碍这种变化, 如图2(c) Ⅱ所示; 当陀螺继续滚动的足够远时, 线圈中磁通量为零, 这时磁铁的运动不会使得线圈内产生感应电流(图2(c) Ⅲ); 当磁铁再次靠近线圈时, 线圈内将产生的一个逆时针的电流来平衡磁通量的变化(图2(c) Ⅳ). 利用Maxwell 15.0软件对磁体的磁通线分布进行了仿真, 如图2(d)所示.
由滑动摩擦解析方程可知[22], 摩擦发电机通过外部的电流可以表示为
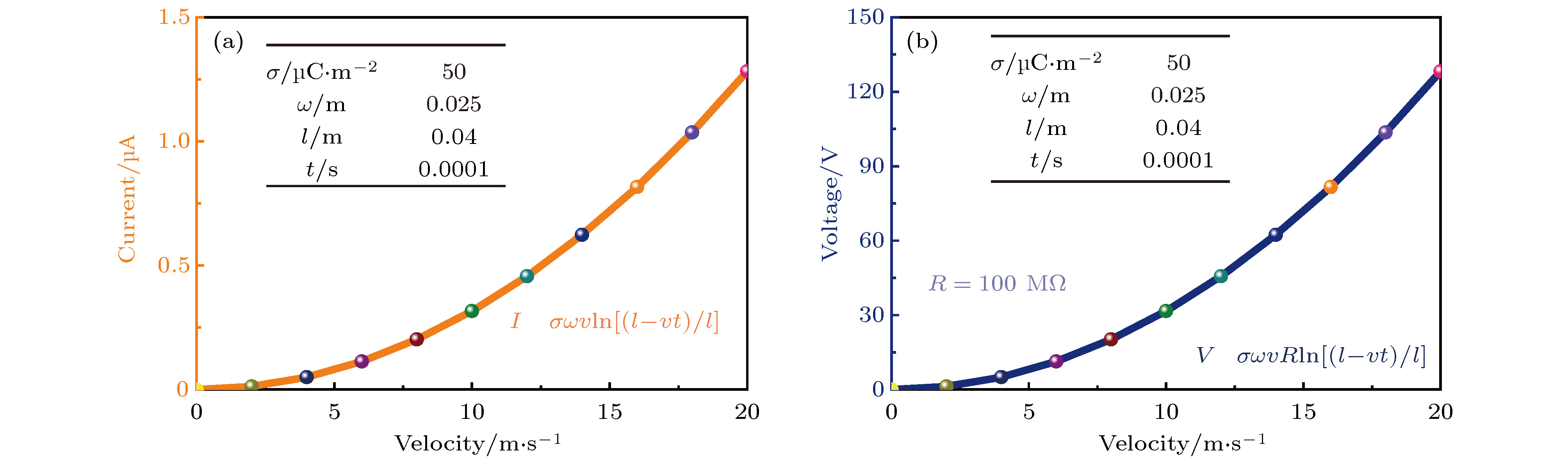 图 3 摩擦发电机的输出与陀螺滚动速度的关系 (a) 摩擦发电机的电流与陀螺滚动速度的关系; (b) 摩擦发电机的电压与陀螺滚动速度的关系
图 3 摩擦发电机的输出与陀螺滚动速度的关系 (a) 摩擦发电机的电流与陀螺滚动速度的关系; (b) 摩擦发电机的电压与陀螺滚动速度的关系Figure3. The relation between the output performance of TENG and the rolling speed of gyro: (a) The relation between the output current of TENG and the rolling speed of gyro; (b) the relation between the output voltage of TENG and the rolling speed of gyro.
由法拉第电磁感应定律可知, 电磁发电机的输出电压为[23]
当线圈内阻为Rcoil时, 线圈中产生的短路电流可以表示为
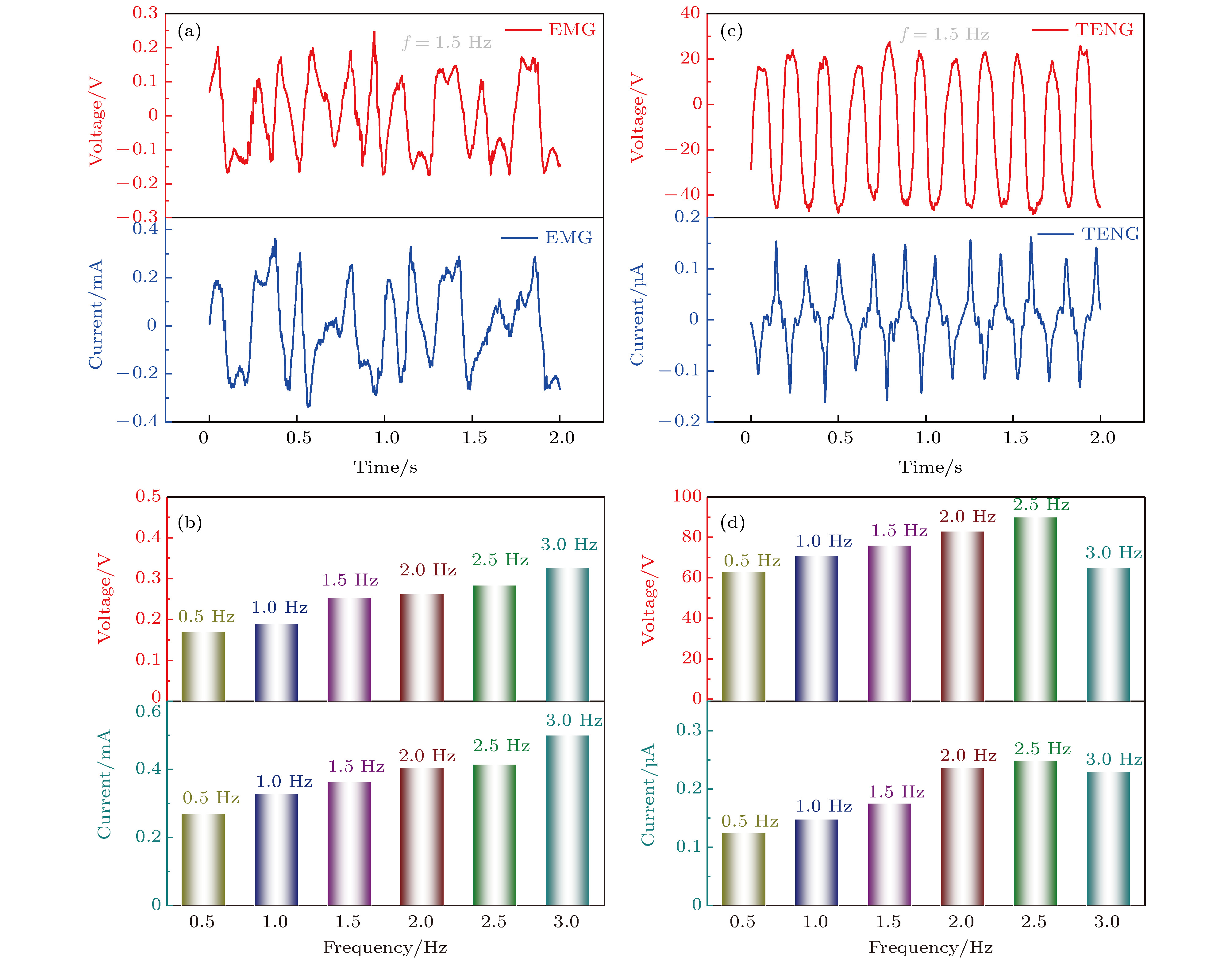 图 4 在线性马达不同激励频率下复合能量收集器的输出特性 (a) 1.5 Hz频率下电磁发电机的输出特性; (b) 不同频率下电磁发电机的输出特性; (c) 1.5 Hz频率下摩擦发电机的输出特性; (d) 不同频率下摩擦发电机的输出特性
图 4 在线性马达不同激励频率下复合能量收集器的输出特性 (a) 1.5 Hz频率下电磁发电机的输出特性; (b) 不同频率下电磁发电机的输出特性; (c) 1.5 Hz频率下摩擦发电机的输出特性; (d) 不同频率下摩擦发电机的输出特性Figure4. The output characteristics of the hybridized nanogenerator excited by a linear motor: (a) The output characteristics of the EMG in 1.5 Hz; (b) the output characteristics of the EMG in different frequencies; (c) the output characteristics of the TENG in 1.5 Hz; (d) the output characteristics of the TENG in different frequencies.
进一步通过调节线性马达的往复行程, 模拟了复合能量收集器在不同振动幅度下的输出, 如图5所示. 图5(a)为电磁发电机在马达不同往复行程下的输出, 图5(b)为摩擦发电机在马达不同往复行程下的输出. 由测试结果可知, 复合能量收集器的输出能量密度在马达往复行程为200 mm时, 明显高于其他行程下的输出能量密度. 这是由于在相同频率的外部激励下, 当行程为200 mm时, 器件进入二次谐振模式, 旋转速度明显增大, 因此俘能效率达到最高.
 图 5 线性马达不同往复行程激励下复合能量收集器的输出特性 (a) 不同振动幅度下电磁发电机的输出特性; (b) 不同振动幅度下摩擦发电机的输出特性
图 5 线性马达不同往复行程激励下复合能量收集器的输出特性 (a) 不同振动幅度下电磁发电机的输出特性; (b) 不同振动幅度下摩擦发电机的输出特性Figure5. The output characteristics of the hybridized nanogenerator under the excitation of different reciprocating stroke of the linear motor: (a) The output characteristics of the EMG under different amplitude; (b) output characteristics of TENG at different amplitudes.
为了评估器件的输出性能, 分别测试摩擦发电机与电磁发电机在2 Hz振动激励下, 不同负载下的输出, 如图6所示. 图6(a)表明摩擦发电机在负载为20 MΩ时输出功率最大, 约为0.084 mW. 图6(b)表明电磁发电机在负载为800 Ω时, 输出功率最大, 约为4.61 mW. 同时, 对复合能量收集器的充电能力进行了测试, 如图6(c)所示. 首先分别对摩擦发电机和电磁发电机的输出进行整流, 整流后的输出并联接到不同容量的电容两端进行充电, 设定目标电压为3 V, 充电曲线如图6(c)所示. 实验证明复合能量收集器将10 μF电容充到3 V大概需要500 s的时间.
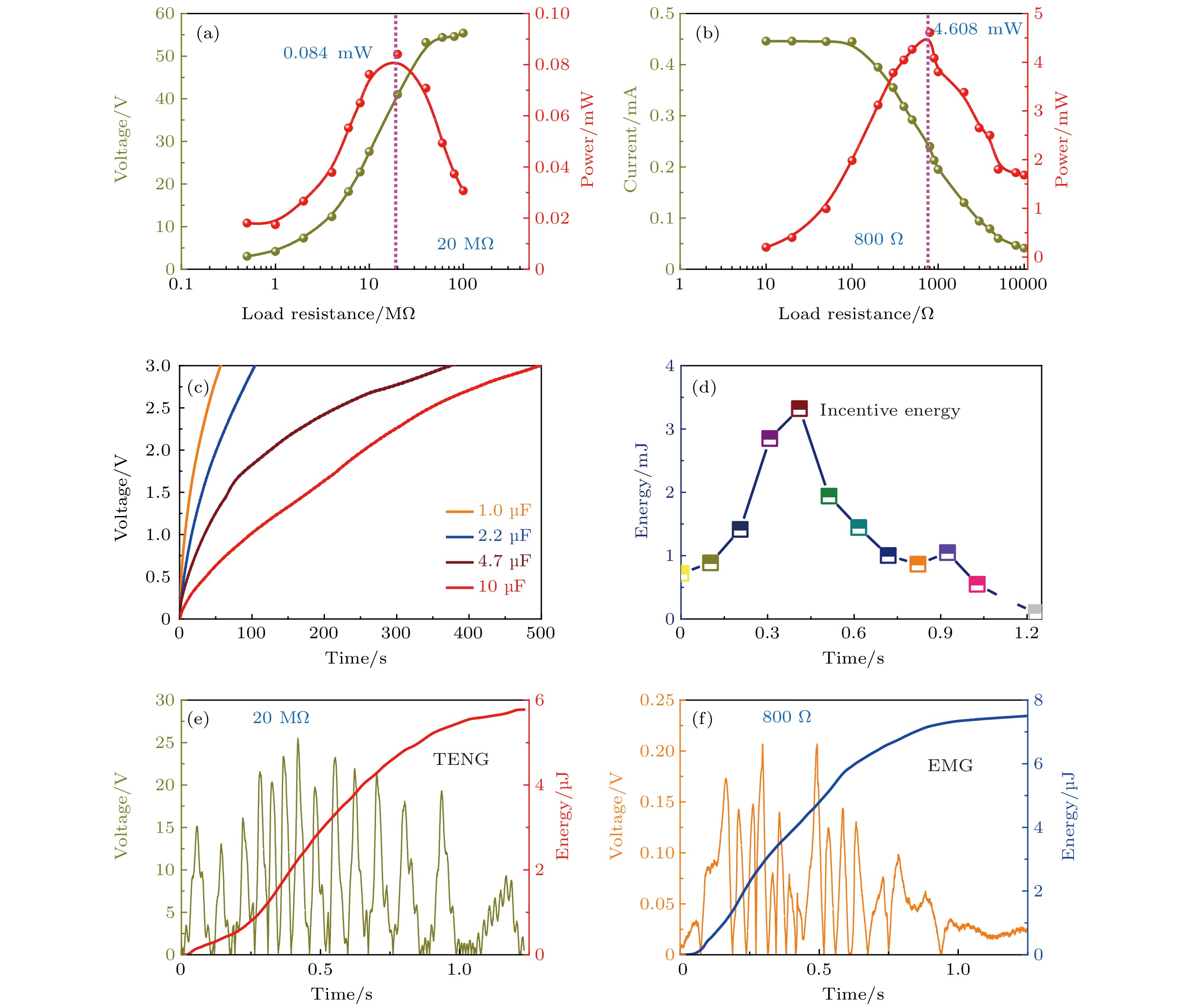 图 6 复合能量收集器的功率与能量 (a) 摩擦发电机在不同负载下的输出电压与输出功率; (b) 电磁发电机在不同负载下的输出电压与输出功率; (c) 复合能量收集器对不同电容的充电曲线; (d) 单次外部激励的机械能量; (e) 摩擦发电机在20 MΩ下的俘能曲线; (f) 电磁发电机在800 Ω下的俘能曲线
图 6 复合能量收集器的功率与能量 (a) 摩擦发电机在不同负载下的输出电压与输出功率; (b) 电磁发电机在不同负载下的输出电压与输出功率; (c) 复合能量收集器对不同电容的充电曲线; (d) 单次外部激励的机械能量; (e) 摩擦发电机在20 MΩ下的俘能曲线; (f) 电磁发电机在800 Ω下的俘能曲线Figure6. The power and energy of the hybridized nanogenerator: (a) The voltage and power curves of TENG under different loads; (b) the voltage and power curves of EMG under different loads; (c) the charging curves of the hybridized nanogenerator for different capacitors; (d) the incentive energy of a single excitation; (e) the output energy of the TENG under 20 MΩ; (f) the output energy of the EMG under 800 Ω.
本文进一步对复合能量收集器件的俘能效率进行了评估. 首先对外部激励能量进行估算. 由于摩擦发电机的由6个叉指电极单元组成(图1所示), 因此每相邻电极单元间隔角度为
器件俘获的电能为
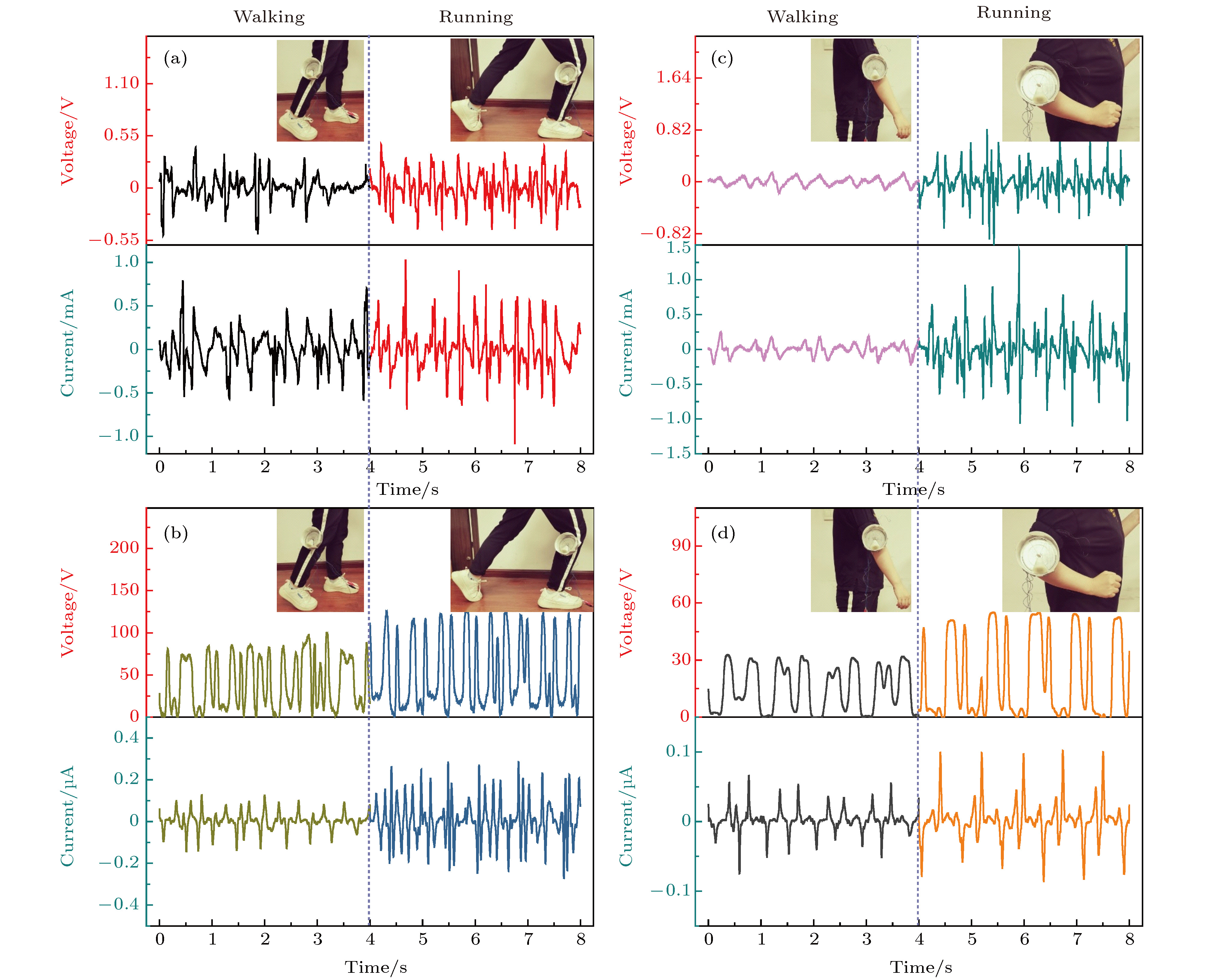 图 7 复合能量收集器对人体运动能的收集能力 (a) 置于腿部, 电磁发电机对人体能量收集的输出曲线; (b) 置于腿部, 摩擦发电机对人体能量收集的输出曲线; (c) 置于手臂, 电磁发电机对人体能量收集的输出曲线; (d) 置于手臂, 摩擦发电机对人体能量收集的输出曲线
图 7 复合能量收集器对人体运动能的收集能力 (a) 置于腿部, 电磁发电机对人体能量收集的输出曲线; (b) 置于腿部, 摩擦发电机对人体能量收集的输出曲线; (c) 置于手臂, 电磁发电机对人体能量收集的输出曲线; (d) 置于手臂, 摩擦发电机对人体能量收集的输出曲线Figure7. The ability of the hybridized nanogenerator to the kinetic energy of the human body: (a) The outputs of the EMG from human body when it is placed on the leg; (b) the outputs of the TENG from human body when it is placed on the leg; (c) the outputs of the EMG from human body when it is placed on the arm; (d) the outputs of the TENG from human body when it is placed on the arm.
为了验证复合能量收集器在自供电传感器中的应用, 搭建了一个自供电计步器模块, 如图8(a)所示. 摩擦发电机与电磁发电机的输出分别整流后, 并联到一个100 μF电容器的两端, 首先对电容器进行充电, 此时开关处于断开状态. 由于计步器模块的工作电压为3 V, 因此当电容器的充电电压略高与3 V时, 将开关闭合, 电容器存储的能量可为计步器提供直流电能. 图8(b)为100 μF电容器的充电曲线, 由图8(b)可知, 将复合能量收集器置于人体腿部, 跑步大约2000 s后, 可将电容电压充到3 V左右. 图8(c)为开关闭合后, 计步器工作实物图. 此实验验证该复合能量收集器在自供电传感领域的应用前景.
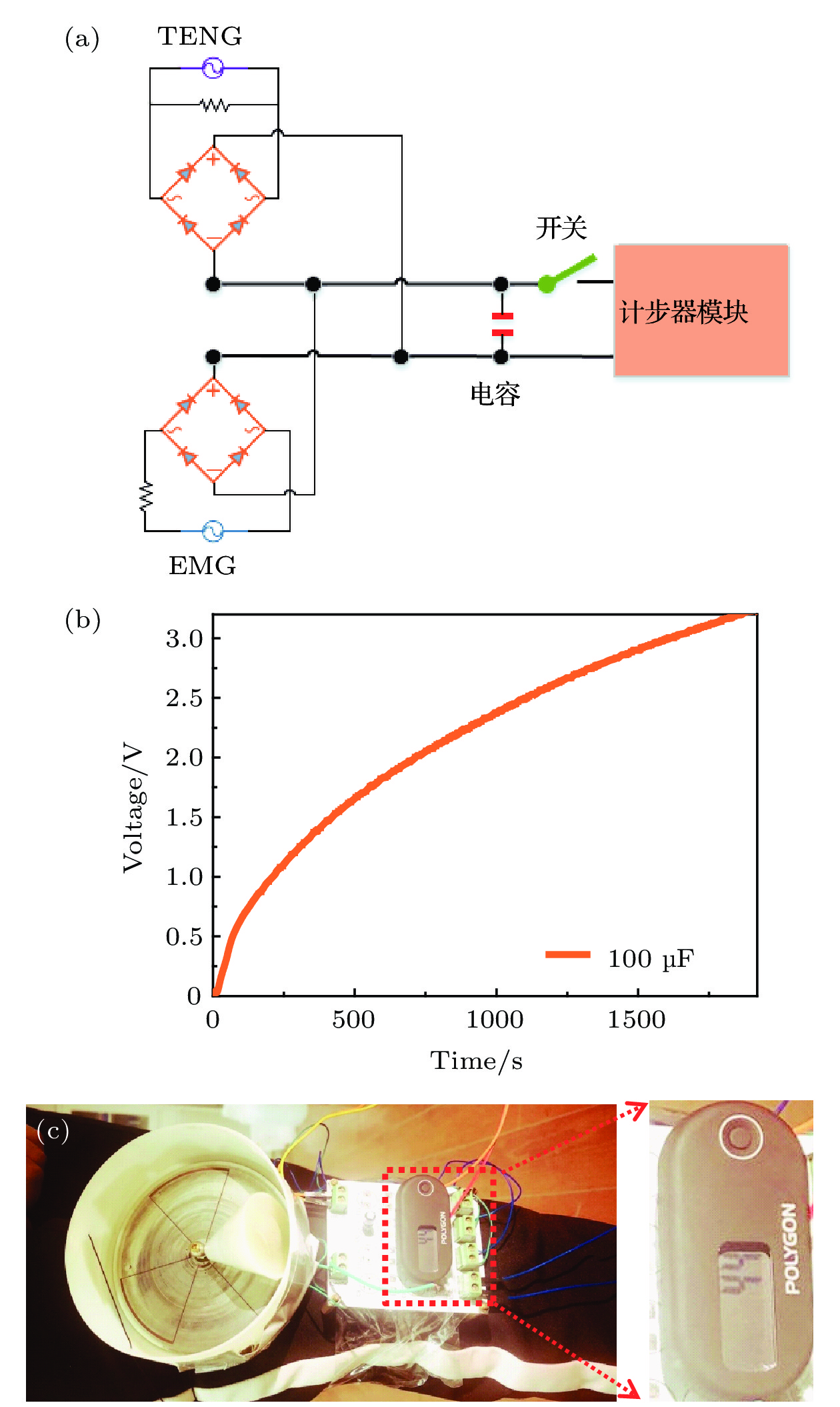 图 8 复合能量收集器在自供电传感器中的应用实验 (a) 自供电计步器模块图; (b) 复合能量收集器对100 μF电容的充电曲线; (c) 自供电计步器实物图
图 8 复合能量收集器在自供电传感器中的应用实验 (a) 自供电计步器模块图; (b) 复合能量收集器对100 μF电容的充电曲线; (c) 自供电计步器实物图Figure8. The application of the hybridized nanogenerator in self-powered sensor: (a) The diagram of self-powered pedometer module; (b) the charging curves of the hybridized nanogenerator for a capacitor of 100 μF; (c) the photograph of self-powered pedometer module.
