1.School of Physics and Electronics, Central South University, Changsha 410083, China 2.The Institute for Advanced Studies, Wuhan University, Wuhan 430072, China
Fund Project:Project supported by the Equipment Pre-research Field Fund, China (Grant No. 6140415020311), the Hunan Provincial Key Laboratory of High Energy Laser Technology Fund, China (Grant No. GNJGJS04), and the Hunan Engineering Research Center of Optoelectronic Inertial Technology, China (Grant No. HN-NUDT1908)
Received Date:10 April 2020
Accepted Date:16 June 2020
Available Online:17 June 2020
Published Online:05 October 2020
Abstract:For the supersonic flow field with large density fluctuation produced by the unsteady flow and turbulent large-scale structures, an effective method to obtain the beam path is to solve the ray equation. Then the optical path difference (OPD), Strehl ratio (SR), optical transmission function (OTF), etc. can be obtained to analyze the optical distortion, and the correction of aero optics effects can be realized to improve the optical system performance. Generally, when the refractive index distribution is arbitrary, the ray equation analytic solution is difficult to obtain.Cellular automata (CA) ray tracing algorithm is proposed in this paper for aero-optical calculation in the 2D discrete flow fields. Unlike numerically solving the ray equation (NSRE), the coordinate value and the offset angle are calculated according to the position and direction transformation rules in CA algorithm. The position transformation rule is used to obtain the end point of the beam vector and determine whether the offset angle needs calculating at each iteration, the direction transformation rule is to calculate the offset angles. Then the refractive index field is integrated along the beam path to obtain the optical path length (OPL). The OPD is calculated from OPL. In this paper, aero-optical calculation is based on two types of flow fields. The supersonic shear layer including supersonic mixing layer and boundary layer 2D density distribution is measured by the nano-tracer-based planar laser scattering (NPLS) technique. The supersonic flow field surrounding the optical dome is simulated based on detached-eddy simulation (DES).The OPDrms and program running time quantitatively verify the calculation accuracy and high efficiency of CA. The results show that for the 2D supersonic NPLS flow field and the 2D supersonic flow field surrounding the optical dome, the calculation accuracy of CA is approximately equal to NSRE. Moreover, we find that the program running time of NSRE is about four times that of the CA algorithm, so the efficiency of ray tracing is effectively improved. Thus, the CA algorithm provides a new scheme for aero-optical calculation in the 2D supersonic flow field. Meanwhile, it also provides a guideline for the research on the ray tracing in 3D discrete aero-optical flow field. Keywords:aero optics/ cellular automata/ ray tracing/ optical path difference
在本文中, 依据模型尺寸参数, 采用基于SST两方程湍流模型的DES模拟来得到超声速光学头罩绕流流场密度场分布[30]. DES模拟在近物面采用雷诺平均方法(Reynolds averaged Navier-Stokes, RANS), 在其他区域采用大涡模拟方法(large eddy simulation, LES), 兼具前者计算量小的优点和后者能分离湍流流动的优势, DES湍流模型方程和RANS控制方程采用全耦合求解[31].图2所示为无冷却喷流光学头罩绕流流场归一化密度分布, 相关参数取值为海拔高度10 km, 攻角为0°, 马赫数为6.0. 对密度做了无量纲处理, 假设ρ表示真实密度, 则图中的无量纲密度值可由ρ/0.41270得到. 其中仿真参数为光波波长1 μm, 初始位置位于均匀来流区域. 在仿真计算时, 设定光线传输方向为z方向且垂直于光学窗口入射. 计算时, 沿着平行和垂直于光学窗口方向取二维截面, 尺寸为600 mm × 50 mm. 图 2 光学头罩绕流流场密度场 Figure2. The density field distribution of supersonic flow field surrounding the optical dome obtained by DES.
4.计算结果与分析在混合层流场密度分布变化较大的区域(图1(a)中红框区域), 使用CA和NSRE算法获得的光线路径如图3所示. CA算法和NSRE算法计算得到的出射该区域后的偏角分别为31.1和30.7 μrad. 图 3 CA算法与NSER算法在混合层得的光线路径 Figure3. Beam paths obtained by CA and NSRE in mixing layer.












































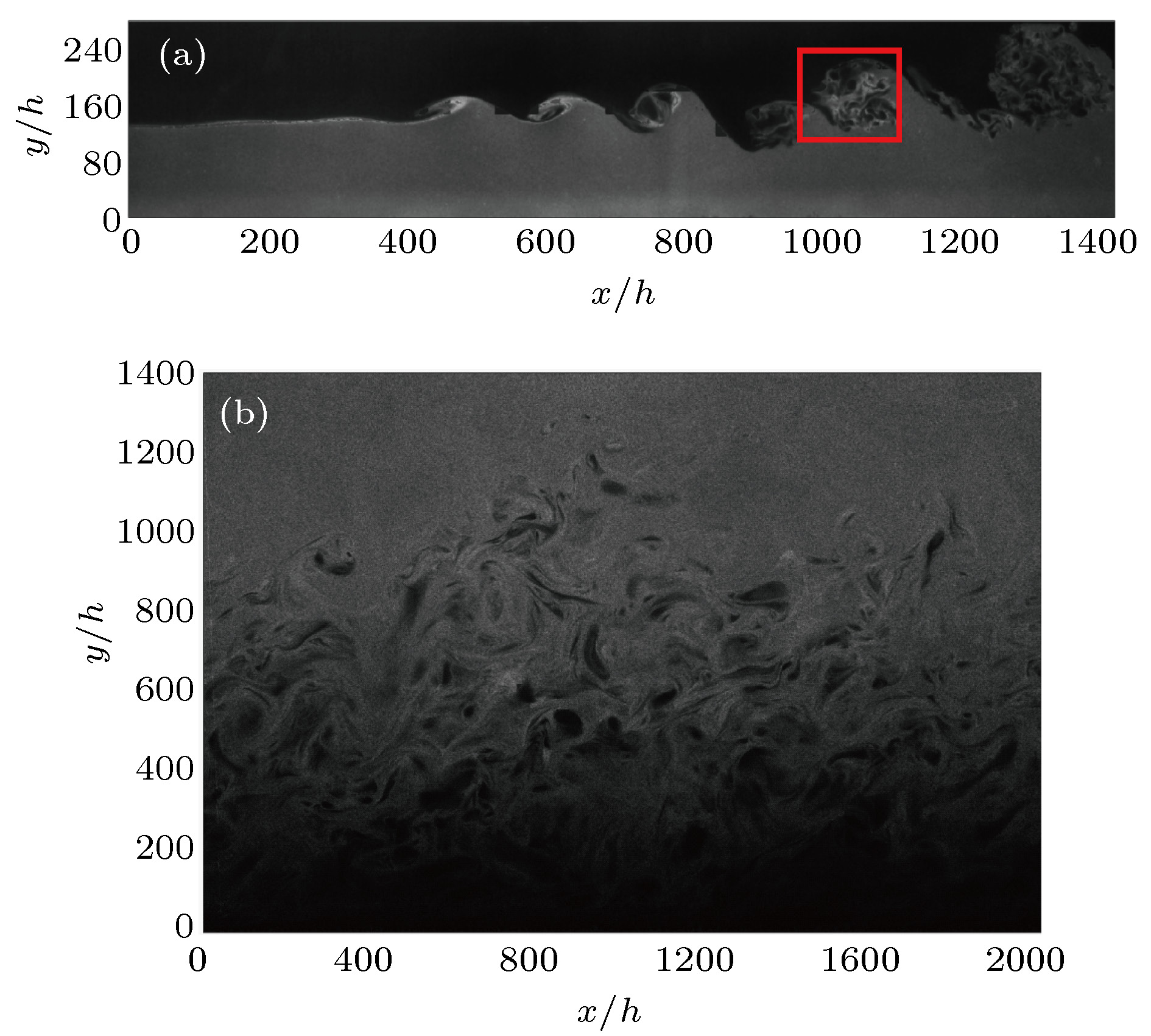 图 1 NPLS获得的超声速剪切层图像 (a)混合层; (b)边界层
图 1 NPLS获得的超声速剪切层图像 (a)混合层; (b)边界层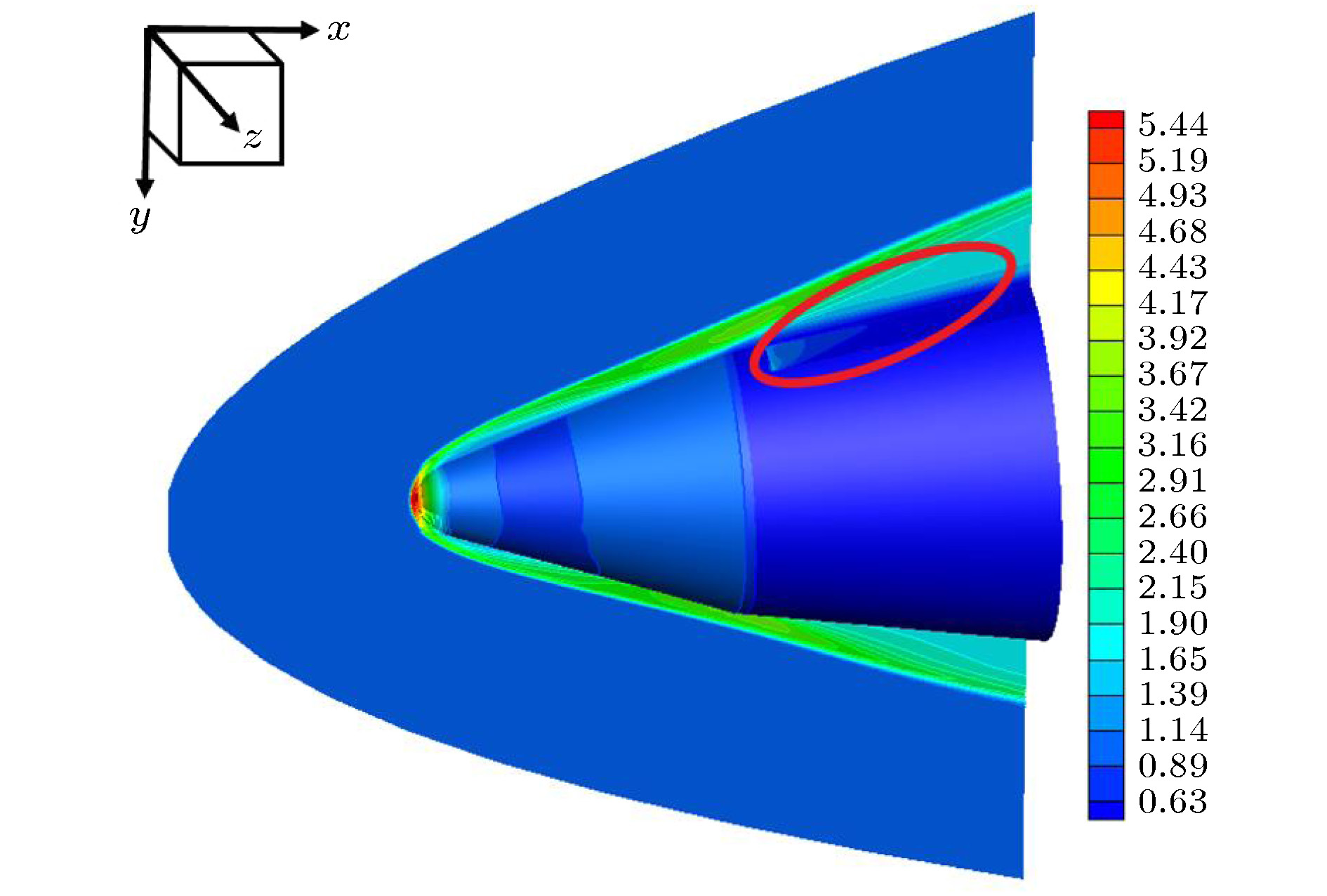 图 2 光学头罩绕流流场密度场
图 2 光学头罩绕流流场密度场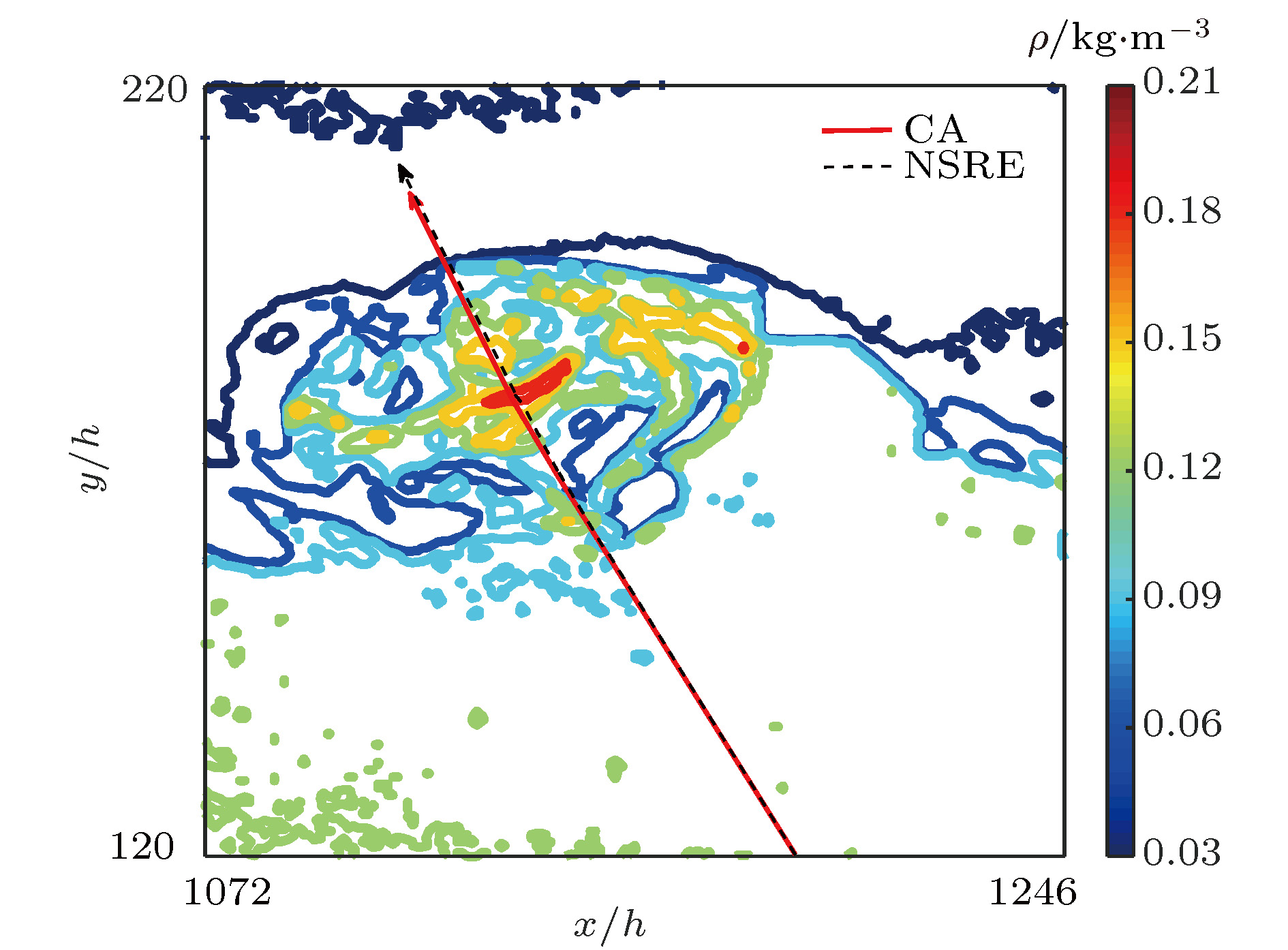 图 3 CA算法与NSER算法在混合层得的光线路径
图 3 CA算法与NSER算法在混合层得的光线路径

 图 4 CA算法与NSRE算法计算得到的OPD (a)混合层; (b)边界层; (c)含激波的超声速光学头罩二维剖面流场
图 4 CA算法与NSRE算法计算得到的OPD (a)混合层; (b)边界层; (c)含激波的超声速光学头罩二维剖面流场






