全文HTML
--> --> -->然而, 基于原子重力仪的野外应用研究才刚刚起步, 仪器真正从实验室原理样机转变为野外工程样机仍需要较长时间. 早期阶段, 人们在慢速卡车[23]、0-g飞机[24,25]、超音速火箭[26]以及空间站[27]上基于原子干涉装置进行了初步的野外实验. 随后, 法国的Bidel等[20]利用电梯测量了不同楼层高度的绝对重力值, 并初步评估了重力场垂直梯度. 此外, 船载绝对重力测量也取得了初步结果, 评估的重力测量精度达到了1 mGal. 美国的Wu等[22]基于原子重力仪进行了野外绝对重力勘测, 实现的测量精度约为40 μGal.
本文将报道我们团队在原子重力仪车载集成与测试方面的最新进展. 我们研制的一套小型化原子重力仪样机通过了中国计量科学研究院的校准测试, 实验室静态测量精度为10 μGal. 基于该样机, 我们在普通箱式货车上集成了一套车载绝对重力测量系统, 并利用该统进行了野外测试, 对车载测量过程、系统温度适应性、数据分析方法及初步测量结果进行了详细分析. 结果发现, 在野外40 ℃高温、8°大倾角普通路面环境下, 该系统仍能够正常工作. 经过多次定点测试, 最终评估的测量精度约为30 μGal. 本文结果为原子重力仪的野外使用提供了思路和参考数据.







本文所用的原子重力仪实验装置与先前文章介绍的装置[29]相似, 是一个改进版本, 其实物照片如图1所示. 下面将着重介绍两者的区别, 并在此基础上描述新实验装置的特点. 新一版的小型化原子重力仪装置也包括超高真空系统、激光光路系统和电子控制系统三部分. 新版超高真空系统集成度更高, 它的体积和重量都有所改善, 直径52 cm, 高度55 cm, 重量70 kg. 我们优化了内部器件分布, 更换了小型离子泵, 改善了支撑脚. 在激光光路系统方面, 优化了系统结构设计, 加装了激光器锁频模块及光路模块的控温功能, 缩小光路光高至20 mm. 因此整个光路更加稳定, 温度适应性更强, 抗震性也得到提高. 电子控制系统的改进是最大的, 通过整合各个自制电路模块, 利用同一块背板进行供电和通信, 使得各模块之间的连接线大大减少. 因此整个电子控制系统的模块化程度变高, 运行效率得到提升, 功耗约为250 W.
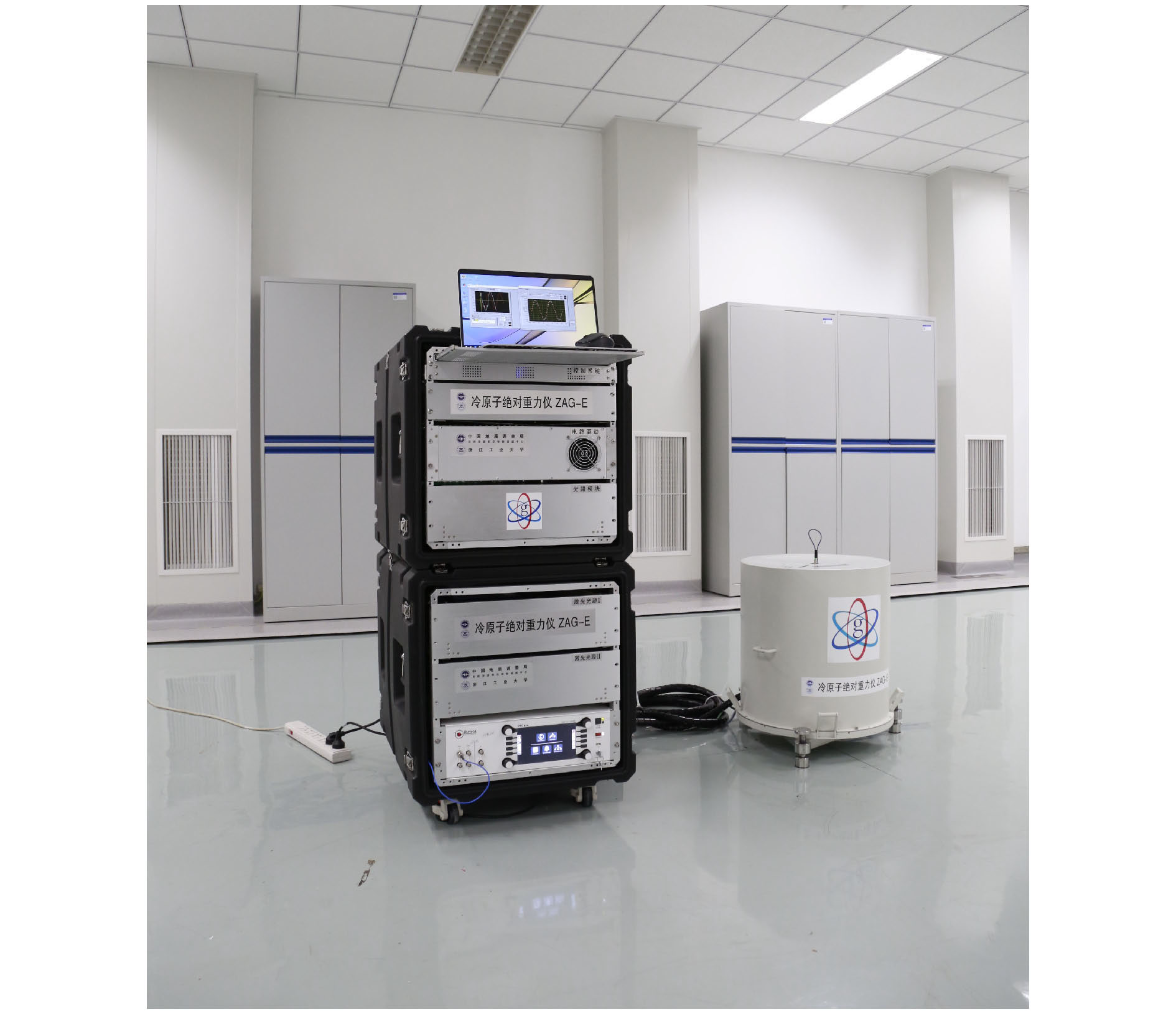 图 1 原子重力仪实验装置的照片
图 1 原子重力仪实验装置的照片Figure1. Photo of experimental apparatus of atomic gravimeter
在进行车载测试之前, 我们对实验用小型化原子重力仪的性能进行了评估, 主要包括灵敏度和精度两方面. 为了评估仪器的状态, 在普通实验室地面上测量了潮汐引起的重力变化数据, 减去潮汐理论数据, 计算的艾伦偏差曲线如图2所示. 评估的重力测量灵敏度约为270 μGal/Hz–1/2, 该灵敏度主要受限于地面振动噪声, 实验中没有加振动隔离的措施. 由测量曲线知, 20 min测量积分时间, 重力测量分辨率可达8 μGal.
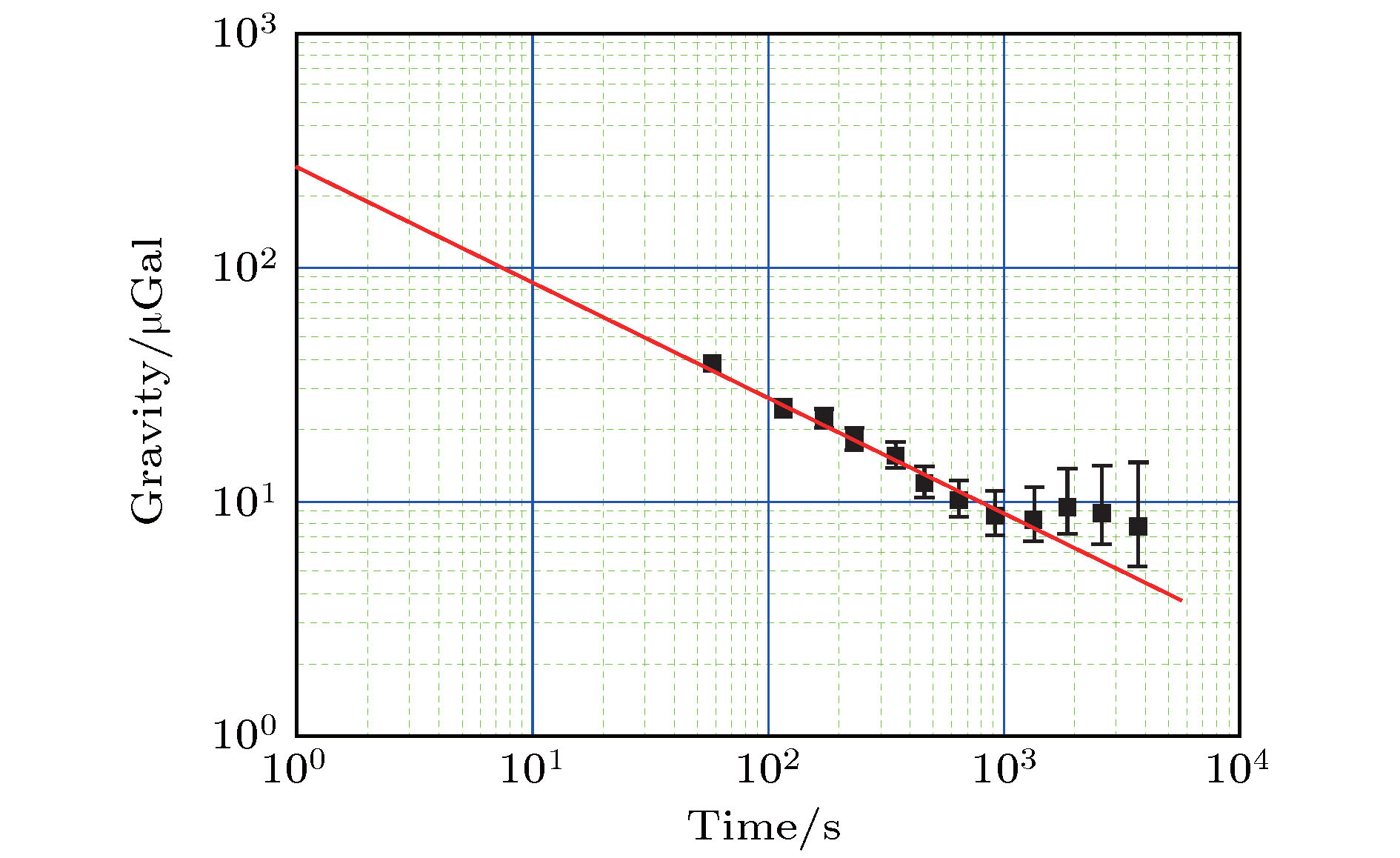 图 2 重力测量灵敏度评估
图 2 重力测量灵敏度评估Figure2. Evaluation of the sensitivity for gravity measurement
在重力测量绝对精度方面, 分析了各个系统误差项, 并进行了内符合测试, 在同一个测量点进行了多次绝对重力测量, 评估的内符合精度约10 μGal. 为了评估仪器的外符合精度, 需要跟其他高精度绝对重力仪进行比对. 因此, 将该设备从杭州运输至北京, 在中国计量科学研究院进行了长期测试及精度评估. 一方面北京的测量环境较好, 仪器的稳定性和灵敏度得以提高; 另一方面, 北京的测点上已经有相对准确的绝对重力值, 可以进行外符合精度评估. 经过两周的测试评估, 该原子重力仪的外符合精度约为10 μGal, 中国计量科学研究院针对该仪器也出具了官方的校准证书. 此外, 参加了在武汉举办的“陆态网络绝对重力比对活动”, 评估的精度也是10 μGal. 因此, 可以基本确定该设备的测量精度为10 μGal.
3.1.车载绝对重力测量系统构成
在上述小型化原子重力仪的基础上, 在一个普通箱式货车上集成了一套车载绝对重力测量系统, 系统构成示意图如图3所示. 该系统主要由原子重力仪测量系统、被动平台隔震系统、位姿平台调平系统、差分GPS测高系统、不间断电源供电系统(UPS)及车载空调温控系统组成.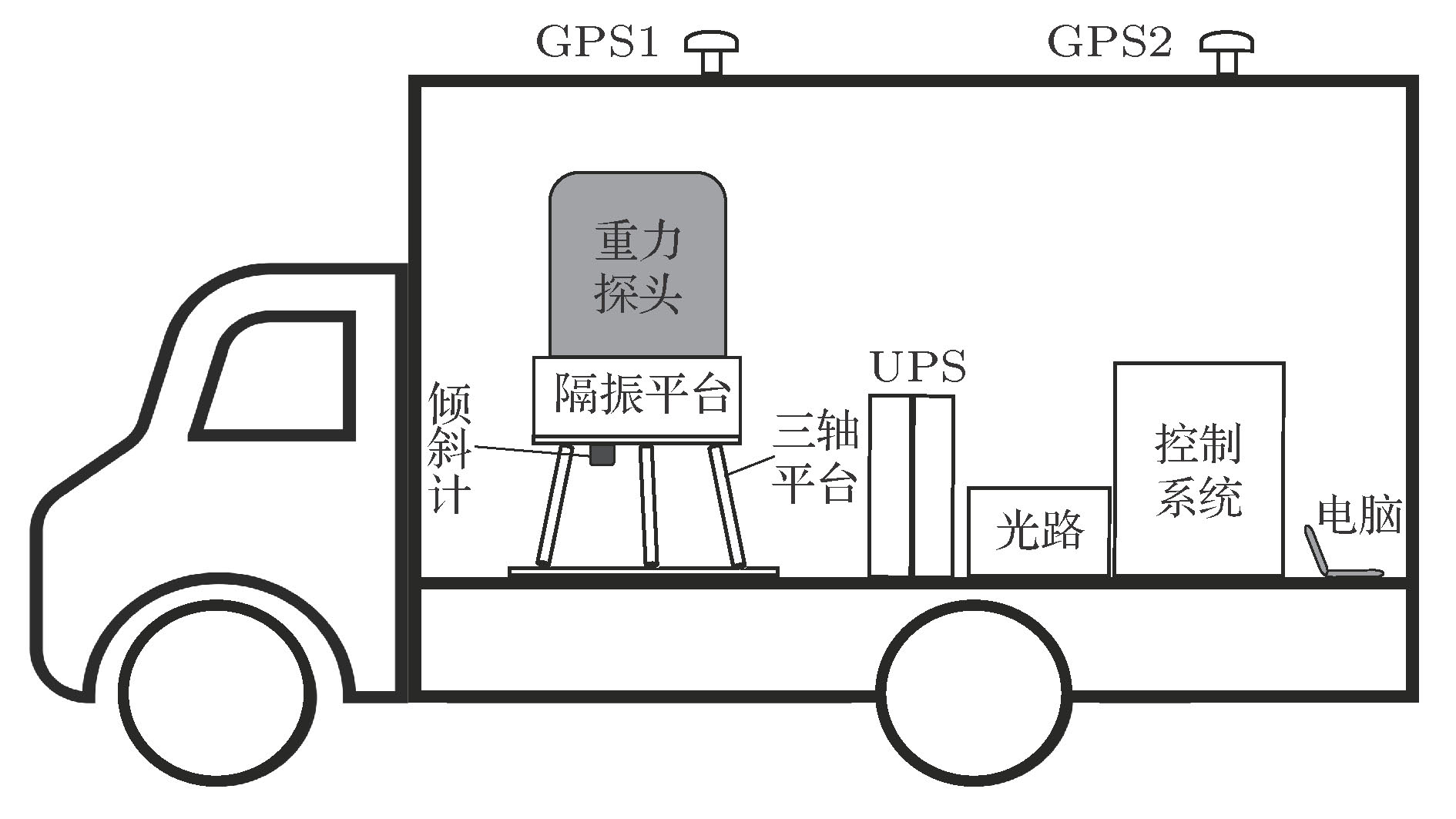 图 3 基于原子重力仪的车载绝对重力测量系统示意图
图 3 基于原子重力仪的车载绝对重力测量系统示意图Figure3. Schematic diagram of the system of absolute gravity measurement on a truck based on atomic gravimeter.
原子重力仪测量系统包括超高真空系统、激光光路系统和电子控制系统三部分, 其中激光光路系统和电子控制系统分别平行地固定在车厢底板上; 超高真空系统放置在被动平台隔振系统上, 该隔振系统用于隔离车上及地面的高频振动噪声, 自然共振频率0.5 Hz, 它对10 Hz以上的高频振动噪声抑制效果较好; 被动平台隔振系统下方是位姿平台调平系统, 该系统的功能是调水平, 它的下表面安装有一个大量程倾斜计, 用于粗调平; 超高真空系统内部集成了一个小量程高精度倾斜计, 该倾斜计可以指示水平位置, 利用电脑控制程序可实现一键调平, 调平精度一般在 μrad量级; 差分GPS测高系统装在车厢顶部, 用于记录测量点的经纬度以及海拔信息, 海拔测量精度可达到cm量级, 后期数据处理时将把海拔信息转化为超高真空系统的高度信息. 不间断电源供电系统放置在车厢底部, 为用电设备提供电源支撑. 车载空调温控系统为测试车辆自带系统, 包括控温和保温两个功能, 通常控温精度在1—2 ℃, 车厢内部及外部还配有多个温湿度监控设备, 可实时显示温湿度信息. 此外, 考虑到测试车辆轮胎会引入随机振动, 我们还配有专用的车辆底盘支撑架, 可将测试车辆架空, 直接固定在地面上. 最后, 为了减少人员的干扰, 设计了远程操作系统来控制整个测量系统.
2
3.2.车载绝对重力测量实验步骤
在车载绝对重力测量系统搭建完成后, 进行了初步测试和联调. 基于位姿平台调平系统, 利用大量程倾斜计进行粗调平; 调整被动隔振平台, 使原子重力仪的超高真空系统悬浮, 且处于隔振的最佳状态; 基于超高真空系统内部集成的小量程高精度倾斜计, 利用位姿平台进行精调平, 整个调整过程耗时约20 min; 关闭车门、测试车辆发动机及空调, 检查实验参数并进入测量状态, 主控电脑开始采集干涉条纹数据, 测量时间设定为20 min. 重力数据测量期间, 利用另外一台辅助电脑同步采集环境参数信息, 包括车厢内外的温度、湿度、气压, 测量点的经纬度、海拔高度及航向角; 车内位姿平台的倾斜角度等, 这些数据将用于后期修正及结果分析. 因有效测量时间为20 min, 根据艾伦偏差曲线, 重力测量分辨率可小于10 μGal.4.1.野外车载环境适应性测试及结果
为了检验已集成的车载绝对重力测量系统, 首先测试了其野外环境适应能力, 测试现场照片如图4所示. 测试内容主要包括运输安全性、空调控温能力、位姿平台倾斜角度稳定性等. 在运输安全性方面, 先后将各个部件放置在车内, 进行跑车实验, 单独检验部件的抗振、抗冲击能力. 经过多次测试, 可保证各个部件在运输过程中不会出现安全性问题. 随后, 对集成后的车载测量系统进行跑车实验, 验证整个系统的可靠性, 实验发现该测量系统能够承受车载运输中的振动及冲击. 图 4 野外车载绝对重力测量现场照片
图 4 野外车载绝对重力测量现场照片Figure4. Photos of field measurement of absolute gravity on a truck.
因测试是在暑假期间开展, 室外温度较高, 我们评估了车载空调的控温能力, 测试数据如图5所示. 由图5可知, 在外界温度超过40 ℃情况下, 车辆内部温度可维持在(24 ± 3) ℃. 实验发现, 原子重力仪样机在空调控温状态下能够正常工作, 重力测量的灵敏度无明显变化.
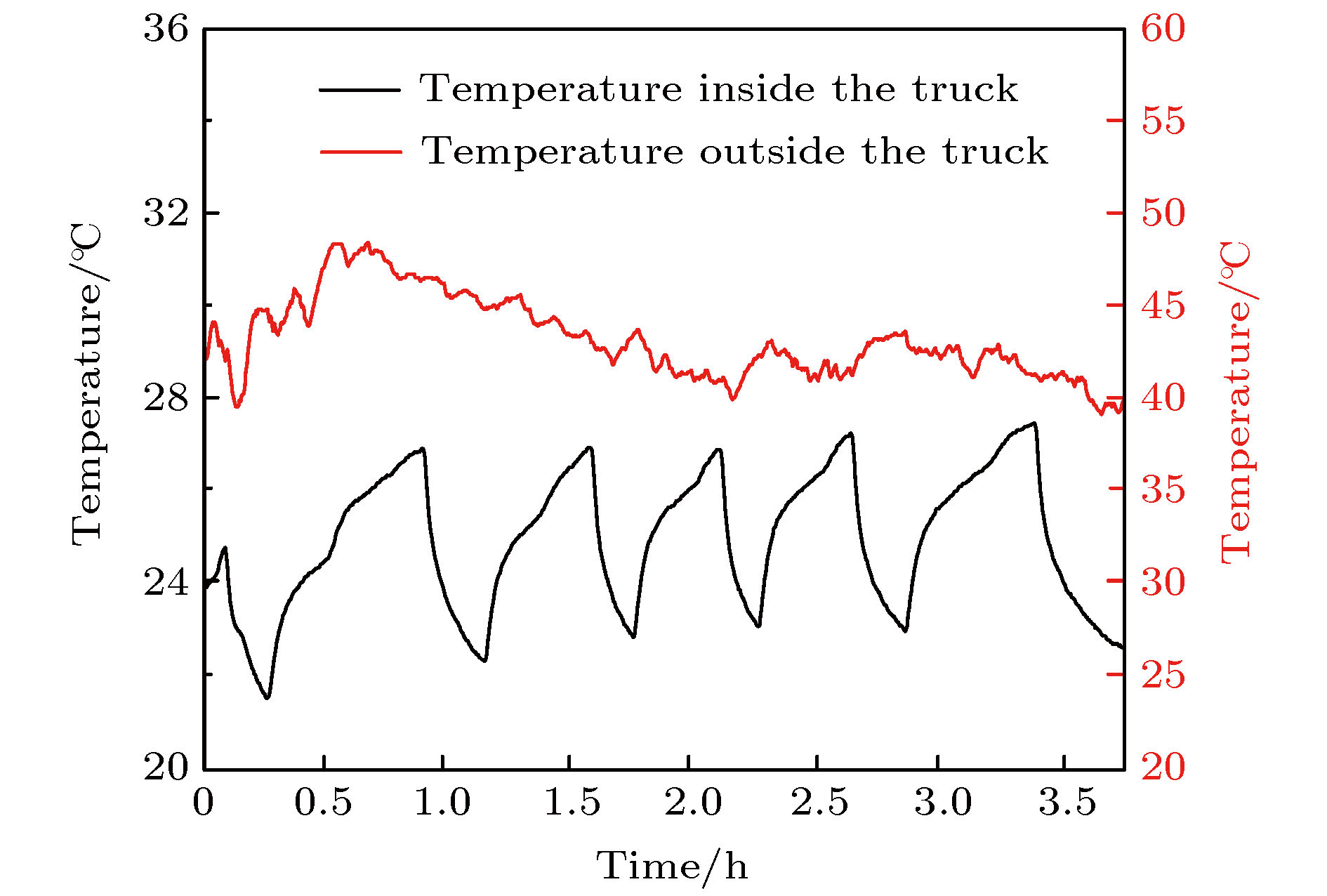 图 5 车厢内外部测量的温度变化曲线
图 5 车厢内外部测量的温度变化曲线Figure5. Curves of temperature changes measured inside and outside of the truck.
在位姿平台倾斜稳定性方面, 利用高精度倾斜计进行了长期监控, 并与实验室内的数据进行了比较, 结果如图6所示. 实验发现, 车载情况下倾斜的高频噪声明显变大, 幅度可达50 μrad, 这些高频噪声主要来源于人员上下车、风、周边车辆引起的车箱随机摇摆. 但倾斜角度的漂移不大, 因此对测量影响不大.
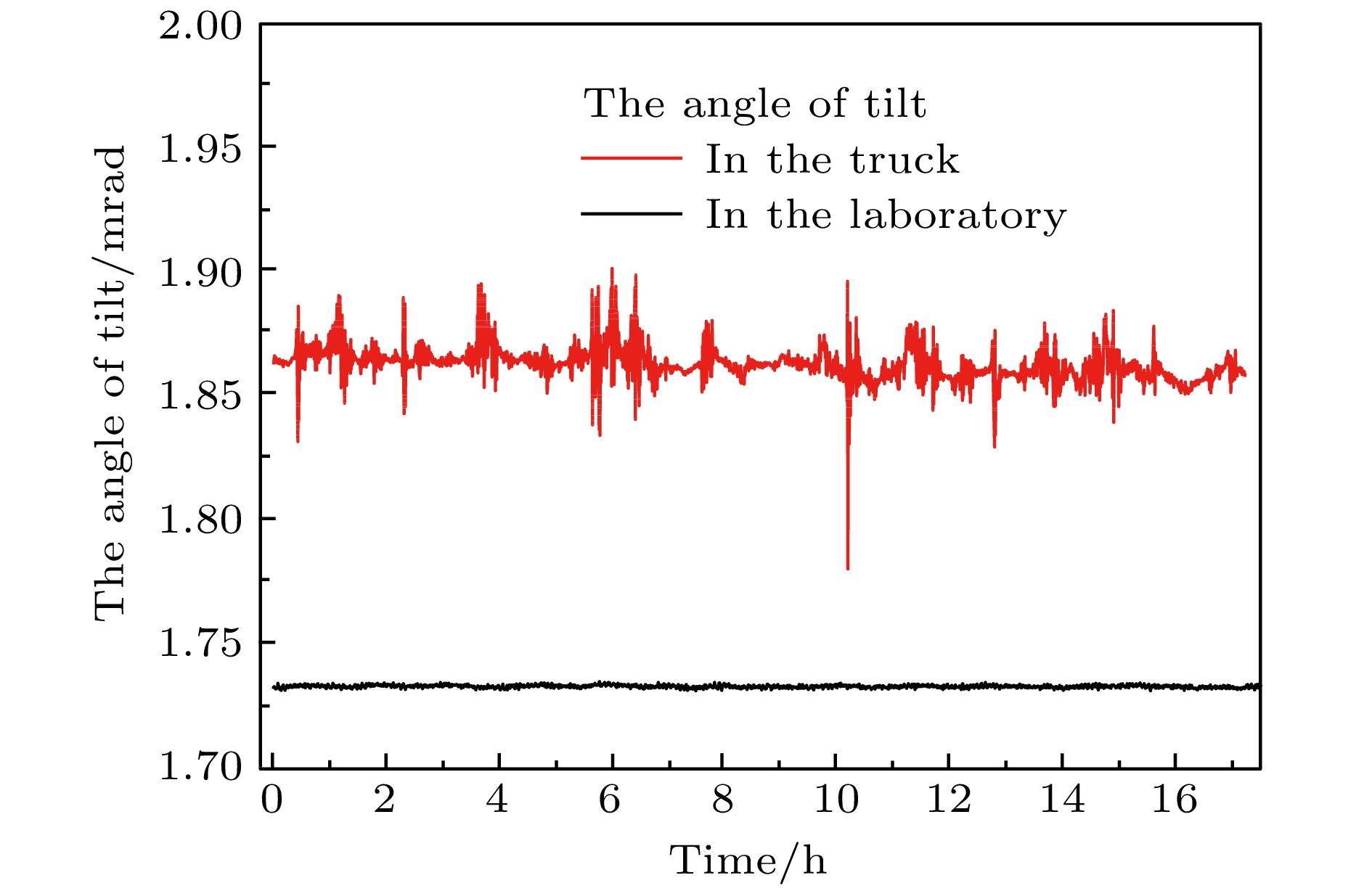 图 6 位姿平台倾斜角度的稳定性测试
图 6 位姿平台倾斜角度的稳定性测试Figure6. Stability test of tilt angles of the posture platform.
2
4.2.野外测试路线规划
在完成野外车载适应性测试后, 对野外测试路线进行了规划. 测试路线包括平坦路面和大倾角路面. 平坦路面的测量环境稍好, 可初步验证整个系统的测量性能. 大倾角路面的测试可进一步评估位姿平台的调节能力, 且测试点有一定高度差, 通过测量可以得到测试区域的重力梯度值.我们选择的平坦路面的跑车路线如图7(a)所示, 基本在浙江工业大学的校园内; S点是出发点位置(实验室门口), A, B, C三点是测量位置, 测试路面较为平坦, 海拔高度基本在19.25 m, 车头统一朝向235.0°, 红色路线一圈的路程约为2 km.
 图 7 野外测量路线规划 (a)平坦路面; (b)大倾角路面
图 7 野外测量路线规划 (a)平坦路面; (b)大倾角路面Figure7. Route planning of field gravity measurement: (a) Flat road; (b) slope road.
大倾角路面的跑车路线如图7(b)所示, 主要在一个比较陡的山坡上进行测试. 测试地点离出发点S的车程约为2.5 km. 我们选取了三个测量点(D, E, F)进行绝对重力定点测量, 其中D点和F点的海拔高度差为12.77 m, 路面的倾斜角度约为8.6°. 此外, D, E, F三个测量点的车头朝向角分别为146.94°, 115.43°, 120.52°, 该朝向角用于修正科里奥利效应引起的绝对重力值. 该跑车路线需要经过一段颠簸路面, 路况较差. 在正式测量前, 测试车辆围绕该路线进行了多次跑车实验, 以检验UPS的供电能力、差分GPS的覆盖范围以及各部件的抗冲击能力. 为了评估仪器的内符合精度, 我们选择相对重力测量领域常用的往返测量方案, 按顺序保证每个测量点都有两个测量数据, 比如测点规划可以是D → E → F → E → D → F.
2
4.3.系统效应修正及数据处理方法
测量到的原始重力数据需要修正仪器的系统效应, 以及由环境因素引起的重力值变化, 以便最终得到每个测点的绝对重力值. 系统效应修正方面, 根据样机的校准测试结果, 对自引力效应、频率基准、激光绝对频率、拉曼光重合度、测量高度修正、双光子光移、科里奥利效应等系统误差进行了修正. 然而, 因科里奥利效应跟原子的平均水平速度相关, 所以原子重力仪测量到的重力值跟仪器朝向有关系, 详细的理论分析和实验结果可参考文献[28].在实际测量中, 车头的朝向会引起重力值变化, 且呈现正弦变化关系, 野外实验前在实验室测量了仪器朝向对重力测量值的影响, 如图8红点所示(红线是正弦拟合曲线). 理论上, 利用拟合的正弦曲线以及测量的车头朝向角, 可以进行相应的科里奥利效应修正. 为了确认拟合的正弦曲线在车载情况下是否一样, 我们在车载环境下重复了科里奥利效应实验. 在车载绝对重力测量系统集成后, 我们在实验室外的空场地画了一个大圆, 并每隔60°做一个标记. 通过整体移动车辆到标记位置, 每隔60°测量一个重力值, 可以得到车头朝向角与重力值的关系, 测量数据如图8黑点所示. 实验发现实验室和野外车载的科里奥利效应在横向上有一个较大的移动, 主要原因是原子在东西方向上的平均水平速度发生了变化. 原子重力仪在装车、安装及调试的过程中, 振动、冲击及温度变化会影响真空系统和激光系统. 真空系统内的反射镜角度、磁场线圈位置、磁屏蔽位置、耦合头位置等会发生变化, 从而导致三维磁光阱中磁场中心与光场中心会发生相对偏离. 激光系统内的激光器性能、光路方向、光纤耦合效率等会发生变化, 从而导致光功率会抖动. 这些因素都会引起原子在东西方向上的水平速度发生变化, 从而引起科里奥利效应在横向上有一个移动. 此外, 野外测量时车辆的朝向角与车内真空探头的朝向角有可能不相同, 实验室测量是以真空探头上的朝向角为基准的, 因此实验室和野外测量时朝向角(图8的横轴)可能存在一定差异, 这也会导致科里奥利效应在横向上有一个移动. 根据野外车载数据拟合正弦曲线, 在野外的每个测点只要记录车头朝向角, 就可以对科里奥利效应引起的重力值变化进行修正.
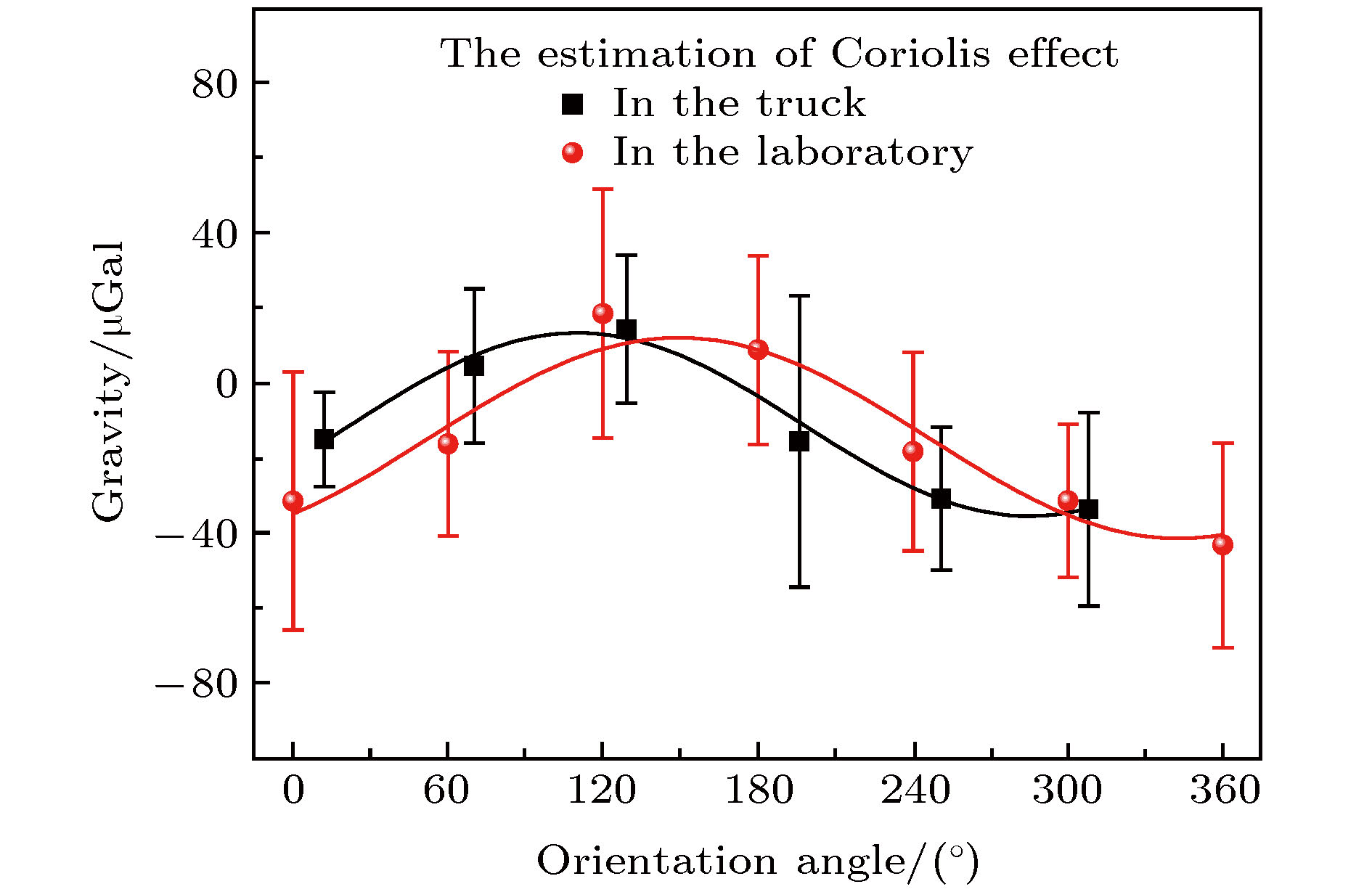 图 8 科里奥利效应的修正(红点, 实验室内的测量数据; 红线, 正弦拟合; 黑点, 车载情况下的测量数据; 黑线, 正弦拟合)
图 8 科里奥利效应的修正(红点, 实验室内的测量数据; 红线, 正弦拟合; 黑点, 车载情况下的测量数据; 黑线, 正弦拟合)Figure8. Correction of Coriolis effect. Red and black dots represent the experimental data measured in the laboratory and the truck. Red and black lines are the corresponding sinusoidal fitted curves.
除此之外, 每个测点还要修正环境引起的绝对重力值变化, 主要包括潮汐、气压以及极地运动. 潮汐引起的重力值修正可以通过理论模型进行计算, 气压引起的重力值变化可以利用高精度气压计采集到的数据进行修正, 极地运动修正可以通过输入极地参数进行计算.
2
4.4.测量结果
在平坦路面情况下, 最终处理后的绝对重力测量数据如图9所示, 两次重复测量的内符合精度较好, 基本在仪器的测量不确定度以内; 通过比较两次测量的残差数据, 可以评估出仪器的内符合精度, 约为30 μGal. A点和C点之间的重力值相差约290 μGal.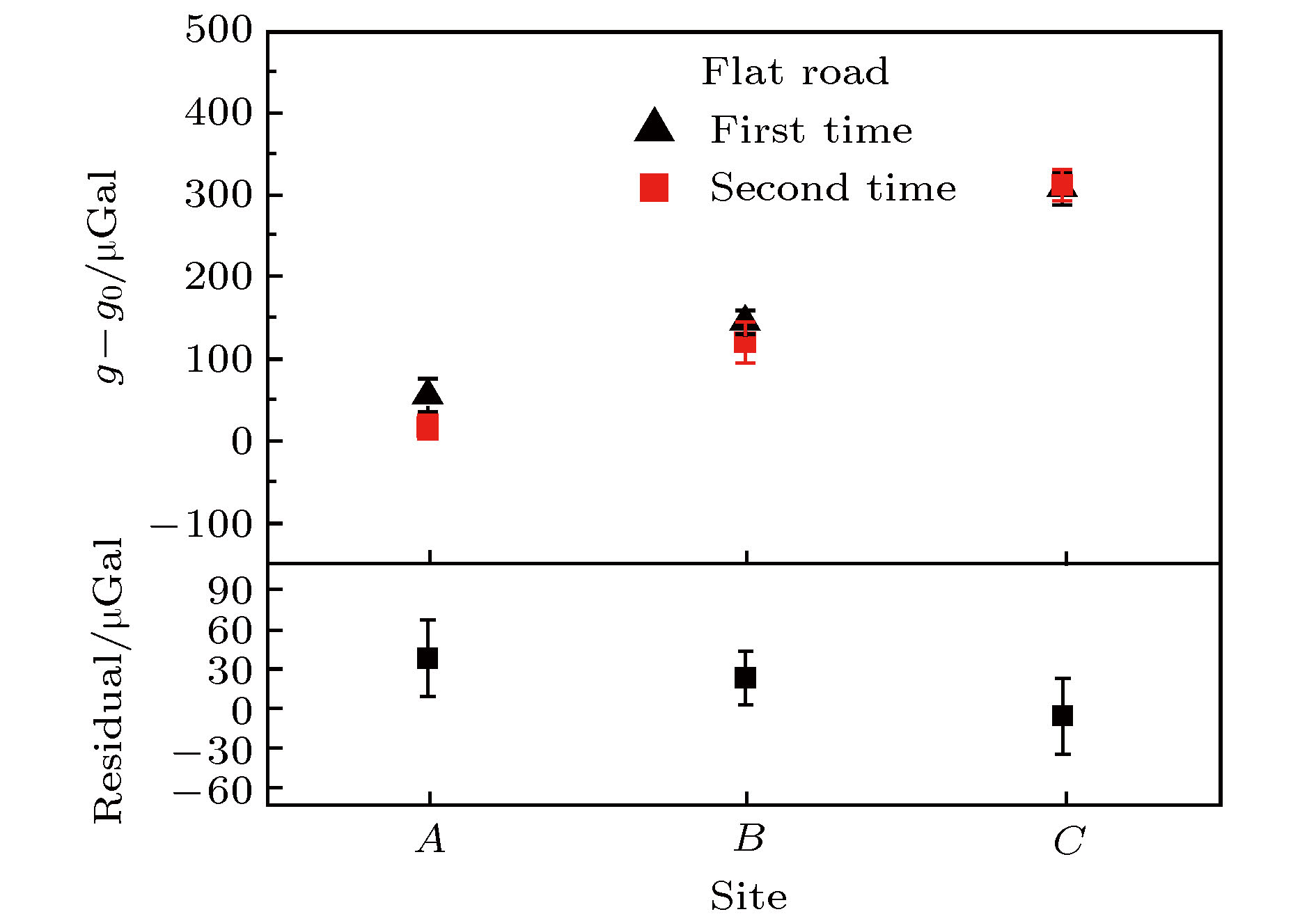 图 9 平坦路面情况下的绝对重力测量结果
图 9 平坦路面情况下的绝对重力测量结果Figure9. Measured resultes of absolute gravity in the case of flat road.
在大倾角路面情况下, 最终的实验结果如图10所示, 仪器的内符合精度也在30 μGal左右, 两次测量数据的重复性较好. 因为三个测量点的垂直高度差较大, D和F点的重力值相差约3080 μGal. 通过线性拟合三测点的海拔高度和绝对重力值, 可得到测点区域的垂直重力梯度, 约为–231(36) μGal/m, 该值比自由空间的垂直重力梯度(一般在–300 μGal/m)小, 主要原因是山体质量的影响, 利用该值可以评估测量区域山体岩石的平均质量密度.
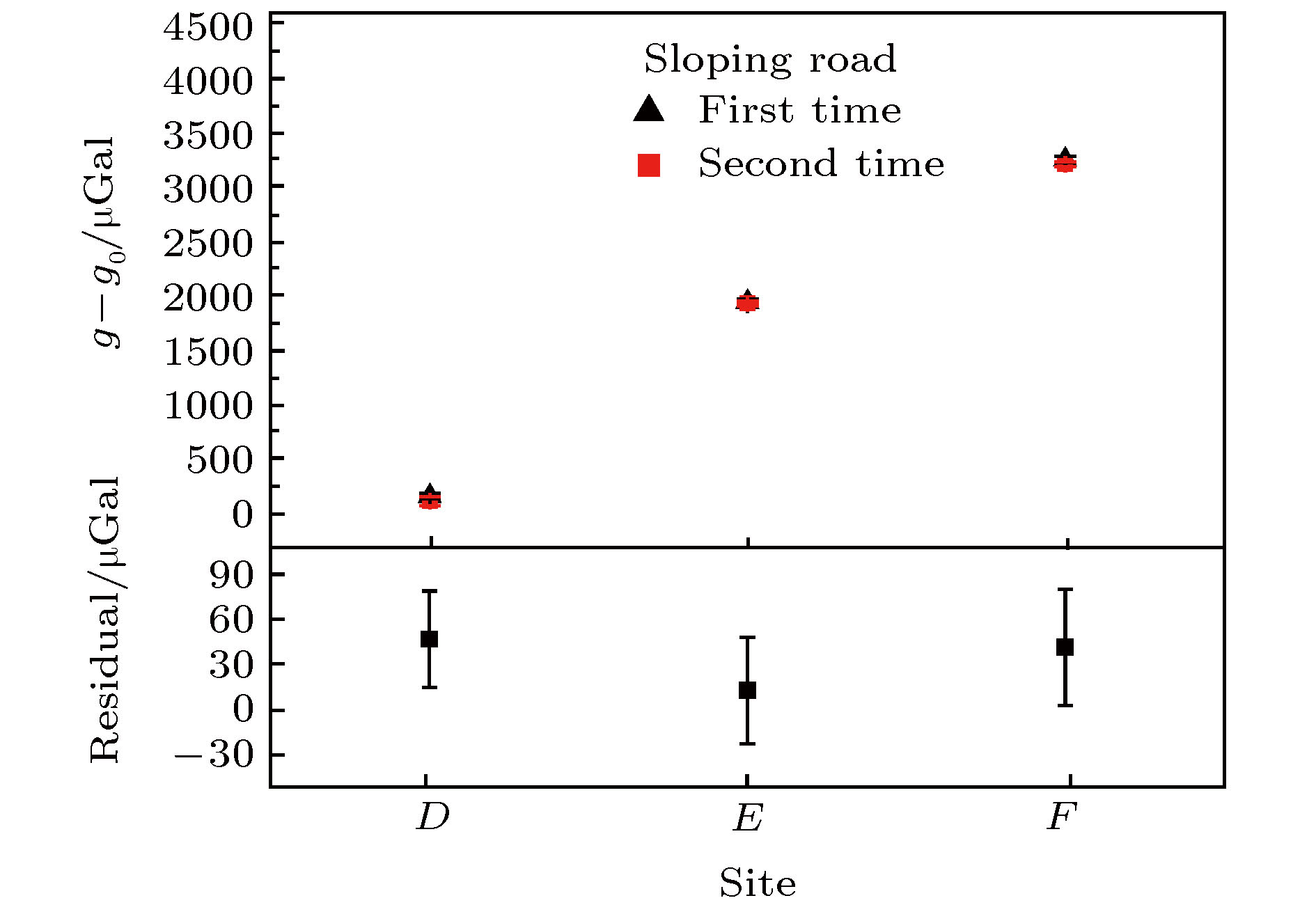 图 10 倾斜路面情况下的绝对重力测量结果
图 10 倾斜路面情况下的绝对重力测量结果Figure10. Measured resultes of absolute gravity in the case of slope road.
基于该车载绝对重力测量系统, 首先在平坦路面上进行了野外测量实验, 评估了仪器的内符合精度, 约为30 μGal. 其次, 在大倾斜的山坡上开展了重复测点工作, 得到的重力值差值为3080 μGal; 通过线性拟合测量到的重力值与海拔高度数据, 得到测量区域的垂直重力梯度值, 约 –231(36) μGal/m, 该梯度值可以用于评估山体岩石的平均质量密度. 目前, 该测量系统的性能有待进一步改善, 重力测量灵敏度主要受限于振动噪声, 测量精度受限于系统效应的稳定性, 测量的自动化和效率有待提高. 该系统可以为流动重力测绘、地质体解释、地球物理研究提供技术支撑.
