1.International Collaborative Laboratory of 2D Materials for Optoelectronics Science and Technology, and Engineering Technology Research Center for 2D Material Information Function Devices and Systems of Guangdong Province, Shenzhen University, Shenzhen 518060, China 2.College of New Materials and New Energies, Shenzhen Technology University, Shenzhen 518118, China 3.Synergetic Innovation Center for Quantum Effects and Applications, School of Physics and Electronics, Hunan Normal University, Changsha 410081, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 61805149, 61575127), the Natural Science Foundation of Guangdong Province, China (Grant No. 2016A030310065), the Educational Commission of Guangdong Province, China (Grant No. 2016KCXTD006), the Program of Fundamental Research of Shenzhen Science and Technology Plan (Grant No. JCYJ20180507182035270), the Science and Technology Project of Shenzhen, China (Grant No. ZDSYS201707271014468), and the Fund of the International Collaborative Laboratory of 2D Materials for Optoelectronics Science and Technology of Shenzhen University, China (Grant No. 2DMOST2018003)
Received Date:04 August 2019
Accepted Date:16 October 2019
Available Online:13 December 2019
Published Online:05 January 2020
Abstract:With the rapid development of metasurface and metamaterials, the image edge detection based on the optical spatial differential calculation becomes an interesting topic in recent years. There have been a certain number of studies in this region, but most of them are applicable only to one-dimensional optical spatial differential calculation. In this work, a two-dimensional optical differentiator using Pancharatnam-Berry (P-B) phase metasurface is proposed and implemented in optical image two-dimensional edge detection. Based on the principle of the spin-dependent splitting from P-B phase devices, this metasurface is capable of separating the left-handed circularly polarized light from the right-handed circularly polarized light at a certain spatial distance. After filtering out the overlapped linear polarization, the left optical information is the result of the two-dimensional optical spatial differential. Meanwhile, the resolution of the image edge information is adjustable by changing the optic axis distribution of this two-dimensional optical differentiator. These results indicate that our P-B phase metasurface can be applied to the extraction of the optical image two-dimensional edge information, and the extracted edge information is more complete than the previous one-dimensional grating metasurface. For these advantages, this two-dimensional optical differentiator shows great potential applications in ultrafast optical calculation and image processing. Keywords:metasurface/ Pancharatnam-Berry phase/ photonic spin Hall effect
不同于传输相位通过控制光程来改变相位[17-20], P-B相位是一种通过改变光场偏振态而产生的几何相位[21,22], 其相位变化与偏振变化相关. 例如, 当LHCP光通过一块半波片后, 其偏振会被转换为RHCP态, 同时携带上一个附加相位, 这个相位即为P-B相位. 其遵守$\left| L \right\rangle \!\to \!{{\rm{e}}^{{\rm{2 i}}\phi }}\left| R \right\rangle $与$\left| R \right\rangle \!\to \!{{\rm{e}}^{ - 2{\rm{i}}\phi }}\left| L \right\rangle $原则, 其中$\phi $为半波片的光轴旋转角. 由于P-B相位型超表面对LHCP和RHCP光束具有不同的相位响应, 若设计恰当的相位分布, 便可使入射的光子发生自旋分离[23-26], 这种自旋分离是实现光学边缘检测的关键. 根据光子自旋分离原理, 为了使LHCP与RHCP光束通过超表面后产生的附加相位相互共轭, 超表面的每个单元结构都需满足半波片条件, 即${\delta _x} - {\delta _y} = {\text{π}}$, 其中${\delta _x}, {\delta _y}$分别为单元结构对x与y方向偏振的相位响应. 由于非晶态TiO2的透明窗口达360 nm, 其带间跃迁刚好处于可见光谱之外, 在整个可见光波段具有很高的传输效率且可达到0—2π的相位变化[27,28]. 因此, 选择TiO2作为P-B相位超表面中介质柱的材料. 图1(a)为设计的微结构单元, 其中基底材料为SiO2, 介质柱材料为TiO2. 介质柱高度h = 600 nm, 晶格大小为325 nm, 即Px = Py = 325 nm. 介质柱长为l, 宽为w, 其长轴与x轴的夹角为$\phi $. 首先, 为使得每个单元结构都满足半波条件, 分别以波长为532 nm的x与y方向的线偏振光作为入射光, 对单元结构中介质柱的长宽$(l, w)$进行参数扫描, 得到${\delta _x}$、${\delta _y}$与$(l, w)$的关系如图1(b)和(c)所示. 图1(d)为${\delta _x}$、${\delta _y}$之间的的相位差值与$(l, w)$的关系, 为满足${\delta _x} - $${\delta _y} = {\text{π}} $以达到半波条件, 选择l = 300 nm, w = 105 nm. 在确定介质柱长与宽之后, 将入射光源设置为圆偏振光, 对单元结构中介质柱旋转角度进行参数扫描, 所得圆偏振光通过单元结构得到的附加相位与介质柱旋转角度的关系曲线如图1(e)所示. 从图中可看出, 圆偏振光入射后得到的附加相位可以覆盖整个0—2π区间. 因此, 根据二维边缘检测所需P-B相位分布可以设计超表面上介质柱的排布方式. 图 1 (a)单元结构示意图; (b)与(c) x与y方向线偏振入射光相位响应与介质柱长(l)、宽(w)之间的关系; (d) x和y方向上的相位差随l和w变化关系; (e)介质柱的旋转角与附加相位关系图. Figure1. (a) Schematic for basic unit structure; (b) and (c) phase response of different length (l) and width (w) of the dielectric column under x- and y- LP incident beams; (d) phase difference between the x- and y-polarized light for different length (l) and width (w) of the dielectric column; (e) relationship between the rotation angle of the dielectric column and the additional phase.
22.2.基于P-B相位超表面实现二维边缘检测的原理 -->
2.2.基于P-B相位超表面实现二维边缘检测的原理
图2(a)为二维光学边缘检测原理示意图. 当一束线偏振(linearly polarized, LP)平面波入射至设计好的P-B相位超表面, 经过傅里叶变换后在像平面中LHCP分量沿着径向向外扩大, RHCP分量沿着径向向内缩小, 中间重叠部分仍为LP. 通过检偏器将LP消光, 仅留下边缘位置光强, 便可达到边缘检测的效果. 由于超表面光轴方向为局部变化[29], 根据琼斯理论, 超表面的光学传输矩阵可以表示为[21] 图 2 (a)光学二维边缘检测原理图; (b) LHCP与RHCP通过PB相位超表面后获得的相位梯度变化; (c) P-B相位超表面示意图; (d)和(e) RHCP与LHCP平面波通过超表面后波前变化图 Figure2. (a) Schematic diagram of the 2D optical edge detection; (b) phase gradient of the LHCP and RHCP component after the P-B phase matesurface; (c) diagram of the metasurface; (d) and (e) wavefront changes of RHCP and LHCP plane waves through the metasurface.
如果通过控制超表面光轴分布函数r的幂指数与周期T, 使得像移$\varDelta $足够小, 便可以达到边缘检测的目的. 因为$r = \sqrt {{x^2} + {y^2}} $, 所以其最后输出场中同时包含了x与y两个方向的边缘信息, 所得结果即为二维边缘检测结果. 图2(c)为根据超表面的光轴分布所设计的超表面示意图, 当LP光束通过该超表面后, LHCP与RHCP两个分量会分别得到如图2(b)所示的两个相互共轭的附加相位梯度. 当LP平面波通过该超表面时, 沿z轴传播的波前变化如图2(d)与(f)所示. 随着传输距离的增加, LHCP与RHCP会在径向产生相对位移, 与理论结果相吻合. 3.仿真模拟结果使用深圳大学的校徽作为掩模板, 当一束平面波通过掩模板后, 其光强分布如图3(a)所示. 首先, 利用文献[15]中所介绍的一维光学边缘检测方法对该图案进行边缘检测, 检测结果如图3(b)—(d)所示. 而各图中右上方小图即为的各自的一维P-B相位光栅, 光栅周期T分别为4, 2, 1 mm. 其中红色线条为超表面的光轴分布, 光轴分布函数$\phi (x, y) = {\text{π}}x/T$. 将其中的“学”字进行放大观测, 可以明显看出, 在y轴方向存在着大量的边缘信息丢失, 这是由于该方法仅仅是让LHCP与RHCP在x方向存在相对位移, 而y方向没有相对位移, 第二块检偏器将y方向所有信息一并滤除, 导致了y方向的边缘信息丢失. 因此, 选择光轴分布的函数为$\phi (x, y) = {\text{π}}\sqrt {{x^2} + {y^2}} /T$的环形光栅式P-B相位超表面对入射光场进行边缘检测, 其光轴分布如图3(e)—(f)右下角小图所示. 将两种条件下的边缘检测结果进行比较, 可以明显看出, 使用光轴分布函数为$\phi (x, y) = {\text{π}}\sqrt {{x^2} + {y^2}} /T$的超表面可以很好的得到图案所有边缘信息, 不存在信息丢失, 达到二维边缘检测效果. 此外, 我们还分析了不同周期对一维与二维边缘检测的影响. 在一维边缘检测的情况下, 由图3(b)—(d)左上方放大的“学”字图案我们可以清楚的发现, 随着周期的增大, 得到的边缘厚度增加, 边缘信息分辨率降低. 但是这种情况并不能完全适用于二维边缘检测, 从图中结果可以看出, 随着周期增大, 边缘信息变得模糊, 并且存在边缘信息丢失. 这是由于在一维情况下, LHCP与RHCP向两个相反的方向进行位移, 其重叠部分相位差相同, 合成线偏振后偏振方向一致, 可以被检偏器完全消光. 但是在二维边缘检测时, 其LHCP与RHCP两个分量在径向进行分离, 随着周期的增大, 径向相对位移增大, 重叠部分中LHCP与RHCP的相位差不完全一致, 进而导致合成线偏振后各位置偏振方向不一致, 检偏器不能将重叠部分完全消光, 使得图案边缘信息变得模糊. 因此, 进行二维检测时, 为了使边缘信息尽可能的完整、清晰, 我们选择使用周期T = 4 mm. 图 3 (a) 深圳大学校徽掩模板; (b)?(d)周期T = 4 mm, 2 mm, 1 mm时, 一维边缘检测效果; (e)?(g)周期T = 4 mm, 2 mm, 1 mm时二维边缘检测效果 Figure3. (a) The mask used in the simulation; (b)?(d) the result of 1D edge extraction when the period T = 4 mm, 2 mm, 1 mm; (e)?(g) the result of 2D edge extraction when the period T = 4 mm, 2 mm, 1 mm.
为了进一步研究边缘信息分辨率与超表面光轴排布两者之间的关系, 对光轴分布函数中r的幂指数进行了研究. 我们选择3种不同的光轴分布函数, 其中包括$\phi (x, y) = {\text{π}}{r^2}$, $\phi (x, y) = {\text{π}}r$, $\phi (x, y) = $${\text{π}}\sqrt r $. 为控制变量并使边缘信息尽可能完整、清晰, 需要保持3种分布函数的周期一致, 且周期T均为4 mm. 这里选用如图4(a)所示不同旋转角度的正方形作为掩膜板, 其中4个正方形的旋转角度依次为0°, 22.5°, 45°, 67.5°. LHCP通过超表面后的相位分布如图4(b)—(d)中所示, 图中红色短线为超表面的快轴分布. 由图4(e)—(g)中的结果可以看出, 随着r的幂指数降低, 在相同周期情况下, 二维边缘信息的分辨率分别为9.5, 4.7, 4.2 μm. 这是由于随着r幂指数的降低, 同样的周期下像移$\varDelta $减小, 即LHCP与RHCP的相对位移的减少, 进而使得边缘信息分辨率提升. 此外, 随着光轴分布函数r的幂指数降低, 其外侧的相位变化率降低, 相同周期情况下, 中间部分LHCP与RHCP的相位差变化更小. 导致中间重叠部分的偏振变化率降低, 检偏器滤光效果得到提升, 使得边缘检测结果的对比度得到提升. 当y方向线偏振光(LHCP与RHCP两个分量的相位差为${\text{π}}$)作为入射光通过超表面后传播0.1 m后, LHCP与RHCP的相位差变化如图4(h)—(j)所示. 由于通过超表面后, 需要使用光轴方向为x的检偏器进行检偏, 即LHCP与RHCP两个分量的相位差为0的光被滤出. 从图中可以看出, 随着光轴分布函数r的幂指数降低, LHCP与RHCP相位差为0的区域越窄, 且相位差变化梯度更陡. 这也进一步验证了边缘检测结果分辨率的对比度提升与光轴分布函数r的幂指数成正比关系. 一维边缘检测主要是通过改变一维光栅的周期来控制边缘信息的分辨率, 与这种方式不同的是, 二维边缘信息的分辨率可以通过控制光轴分布函数中r的幂指数来调节. 图 4 (a)形状不同的正方形掩膜板; (b)?(d)超表面的快轴分布以及LHCP通过超表面后的相位分布; (e)?(g)不同光轴分布的超表面实现边缘提取效果; (h)?(j)经过传输距离为0.1 m后LHCP和RHCP的相位差分布 Figure4. (a) Mask patterns of different squre; (b)?(d) metasurface fast-axis distributions and phase distributions of LHCP after metasurface; (e)?(g) results of the edge extraction with different Metasurface fast-axis distributions; (h)?(j) phase difference distributions of LHCP and RHCP at 0.1 m transmission distance.
此外, 本文还对不同排布方式下的P-B超表面边缘检测系统的传递函数进行了计算, 并分别绘制x = 0与y = 0两种情况下的光谱传递函数曲线. 根据光谱传递函数的定义, $H(k) = {E_{{\rm{out}}}}(k)/{E_{{\rm{in}}}}(k)$, 其中${E_{{\rm{out}}}}(k)$为输出频谱面的光场分布, ${E_{{\rm{in}}}}(k)$为输入频谱面的光场分布. 如图5所示, 对于一维边缘检测系统(蓝色曲线)而言, 其仅在一个方向上为典型的边缘检测传递函数曲线(中间部分传递函数为零, 边缘部分趋于1). 而对于我们所设计的二维边缘检测系统, 由于超表面关于中心点对称, 不同角度下径向的传递函数一致, 因此x与y方向过中心点的传递函数曲线一致, 其两个方向上均显示出很好的边缘检测效果. 并且随着r幂指数的降低, 传递函数曲线变得更加陡峭, 表明检测系统的分辨率得到了提升, 进一步验证了前面的结论. 图 5 幂指数不同的光轴分布函数分别在x与y方向上的空间传递函数 Figure5. Spatial spectral transfer function of the optical axis distribution functions with different power exponent in the x- and y- direction respectively.















 图 1 (a)单元结构示意图; (b)与(c) x与y方向线偏振入射光相位响应与介质柱长(l)、宽(w)之间的关系; (d) x和y方向上的相位差随l和w变化关系; (e)介质柱的旋转角与附加相位关系图.
图 1 (a)单元结构示意图; (b)与(c) x与y方向线偏振入射光相位响应与介质柱长(l)、宽(w)之间的关系; (d) x和y方向上的相位差随l和w变化关系; (e)介质柱的旋转角与附加相位关系图.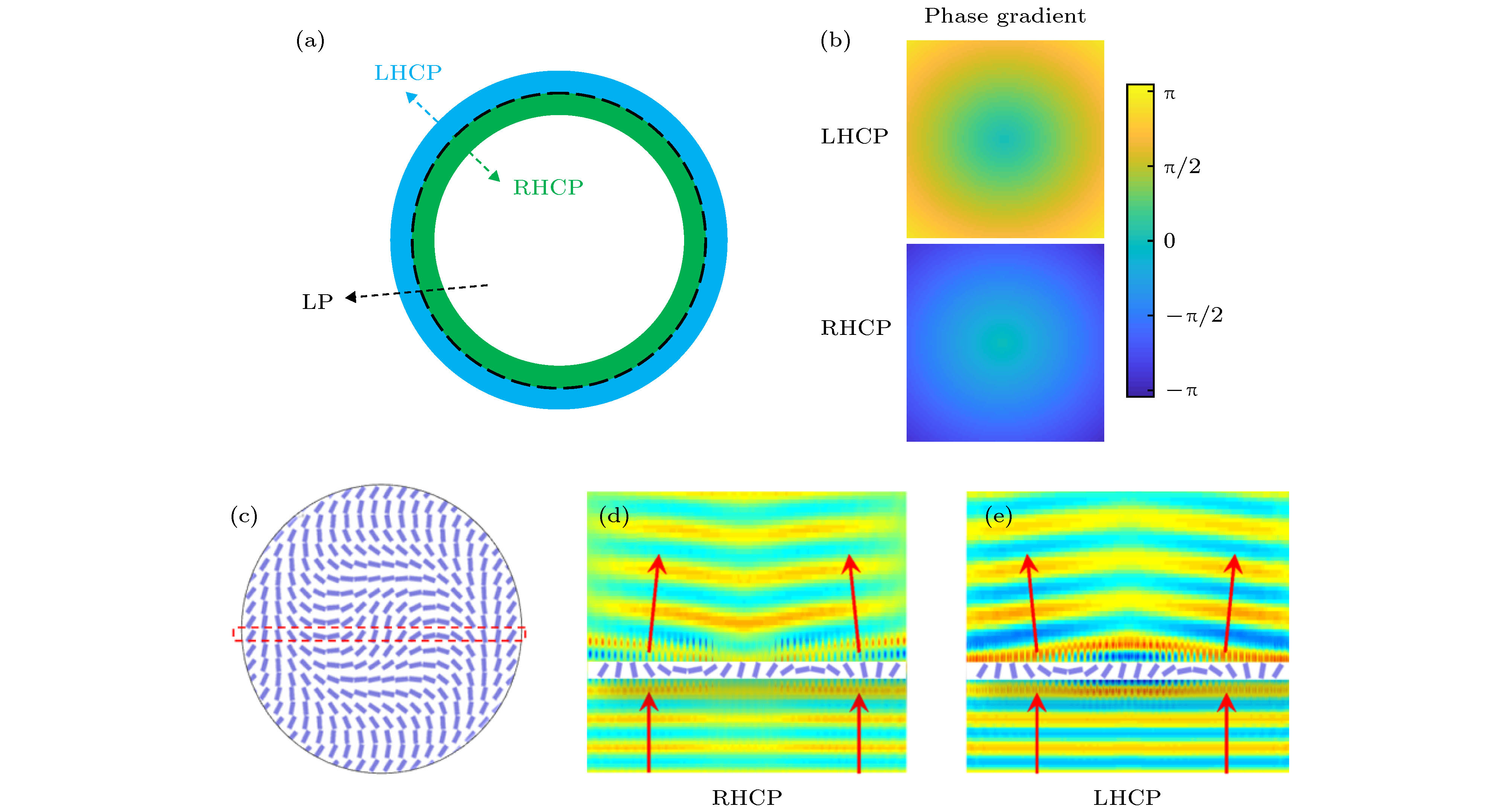 图 2 (a)光学二维边缘检测原理图; (b) LHCP与RHCP通过PB相位超表面后获得的相位梯度变化; (c) P-B相位超表面示意图; (d)和(e) RHCP与LHCP平面波通过超表面后波前变化图
图 2 (a)光学二维边缘检测原理图; (b) LHCP与RHCP通过PB相位超表面后获得的相位梯度变化; (c) P-B相位超表面示意图; (d)和(e) RHCP与LHCP平面波通过超表面后波前变化图














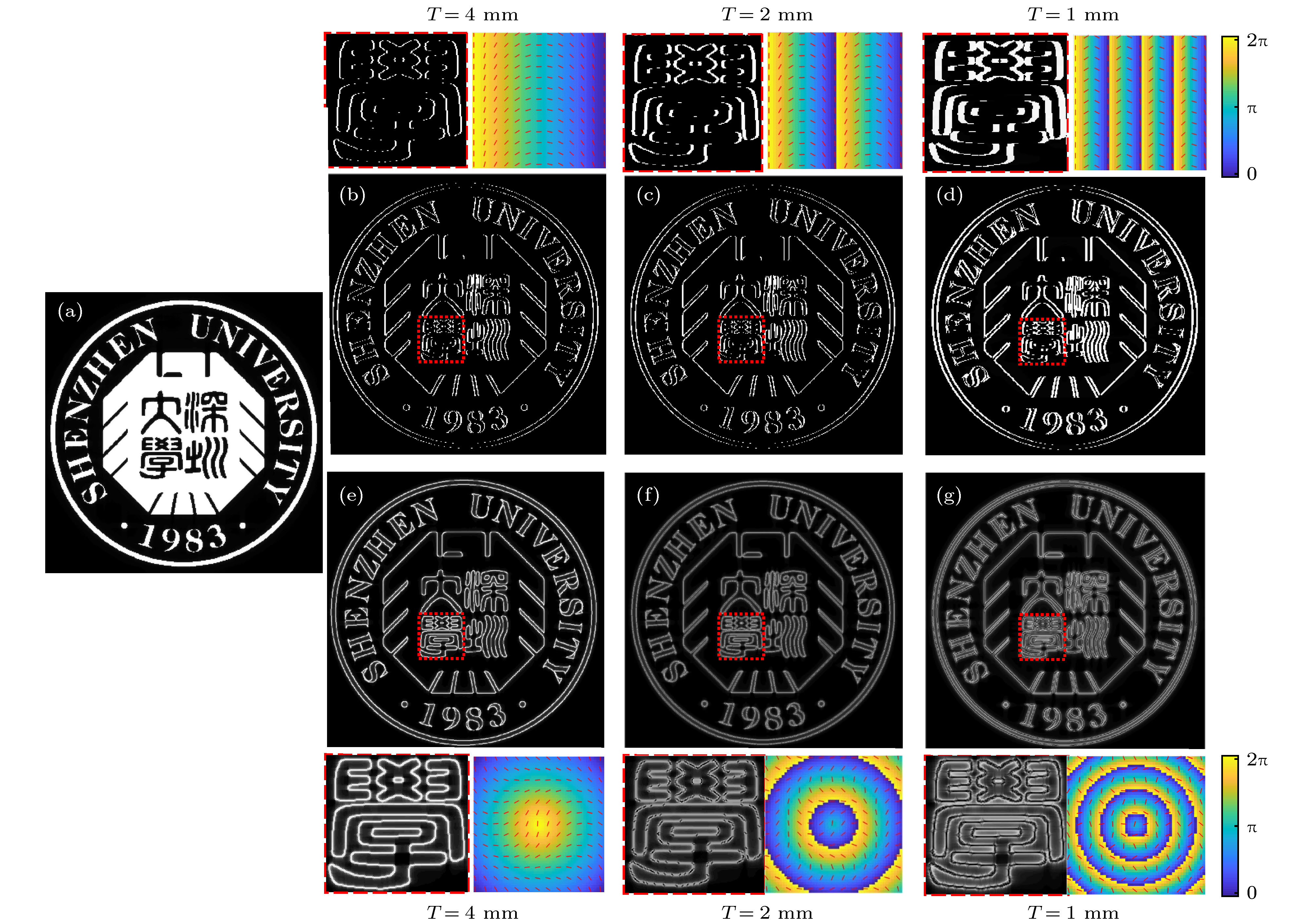 图 3 (a) 深圳大学校徽掩模板; (b)?(d)周期T = 4 mm, 2 mm, 1 mm时, 一维边缘检测效果; (e)?(g)周期T = 4 mm, 2 mm, 1 mm时二维边缘检测效果
图 3 (a) 深圳大学校徽掩模板; (b)?(d)周期T = 4 mm, 2 mm, 1 mm时, 一维边缘检测效果; (e)?(g)周期T = 4 mm, 2 mm, 1 mm时二维边缘检测效果





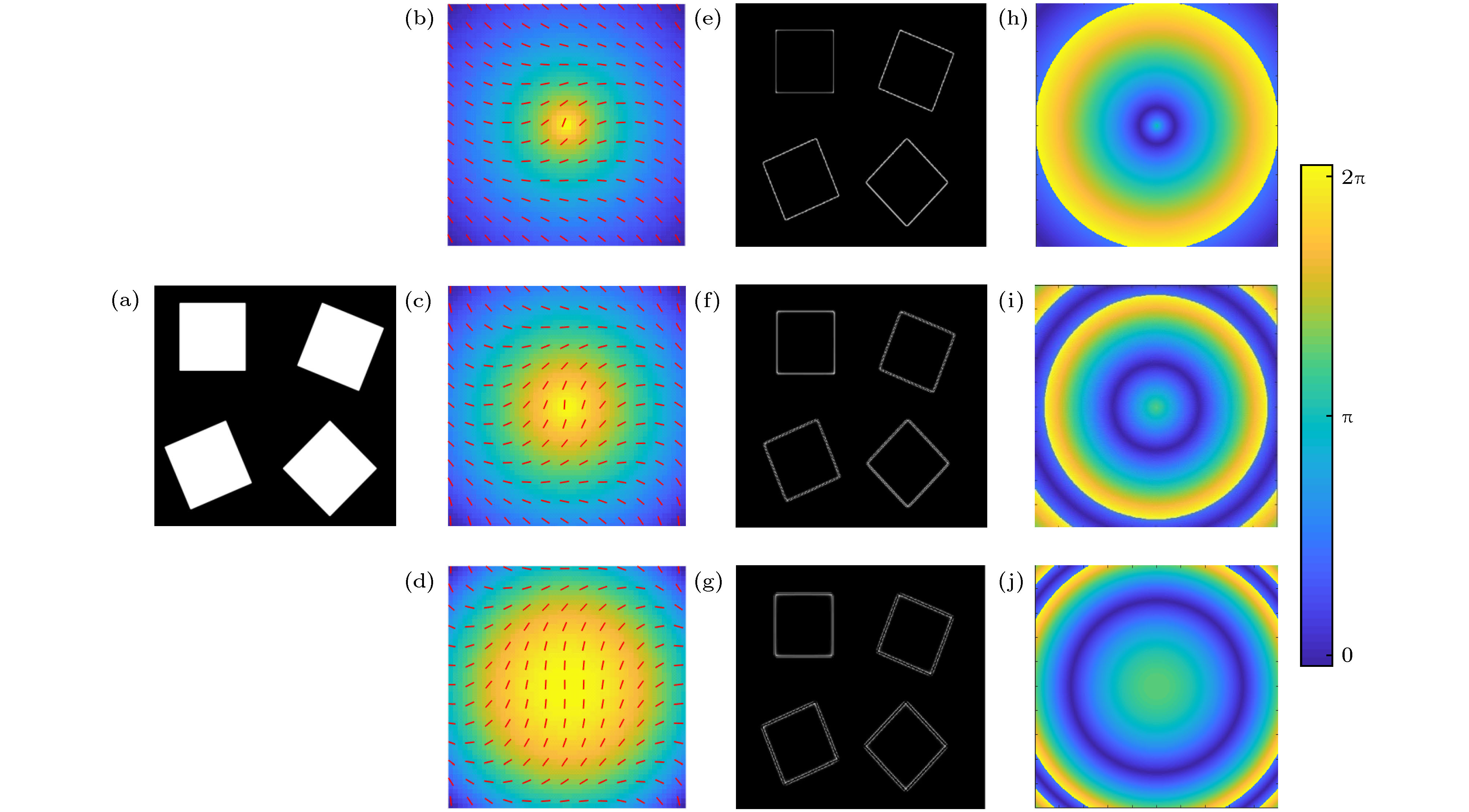 图 4 (a)形状不同的正方形掩膜板; (b)?(d)超表面的快轴分布以及LHCP通过超表面后的相位分布; (e)?(g)不同光轴分布的超表面实现边缘提取效果; (h)?(j)经过传输距离为0.1 m后LHCP和RHCP的相位差分布
图 4 (a)形状不同的正方形掩膜板; (b)?(d)超表面的快轴分布以及LHCP通过超表面后的相位分布; (e)?(g)不同光轴分布的超表面实现边缘提取效果; (h)?(j)经过传输距离为0.1 m后LHCP和RHCP的相位差分布


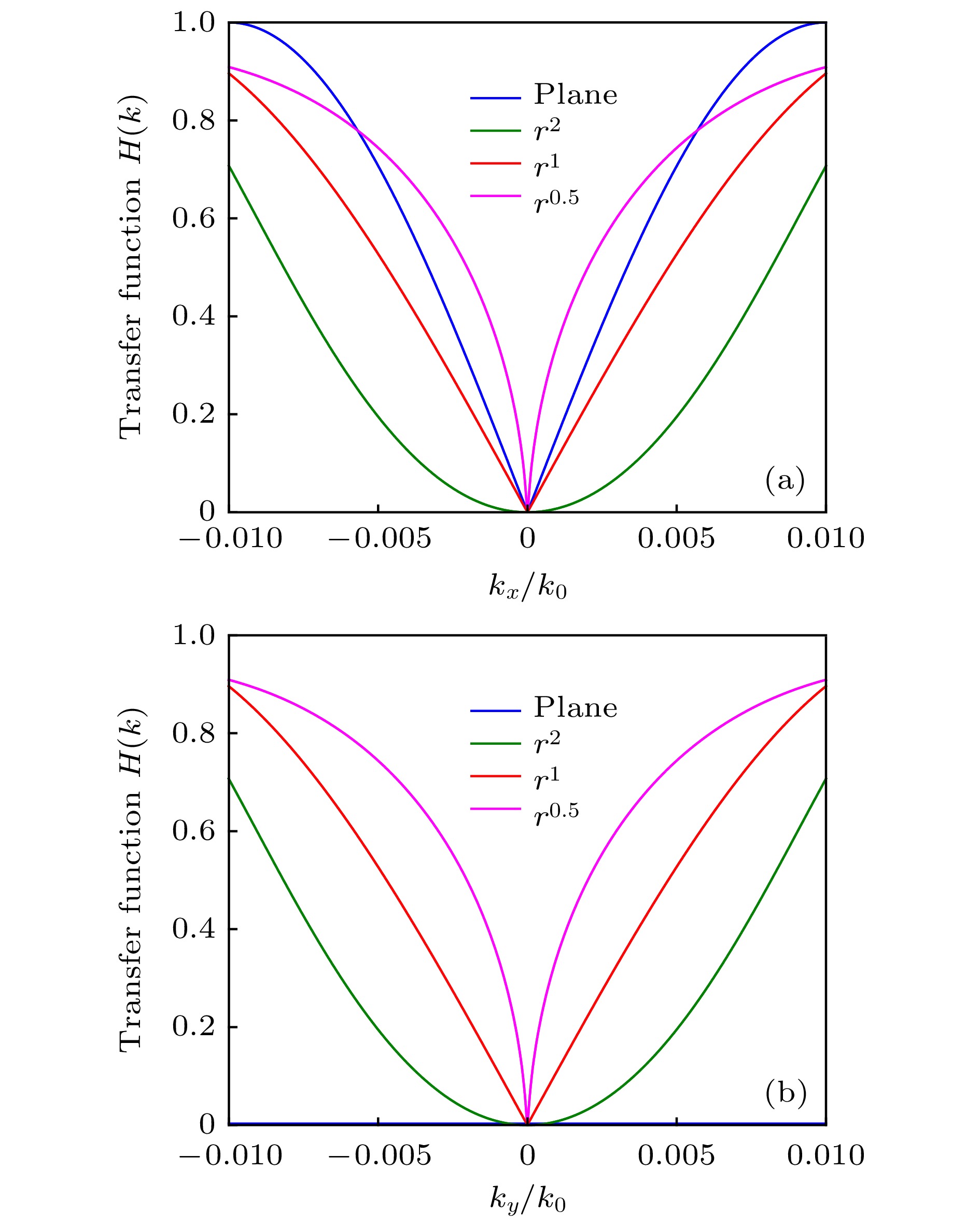 图 5 幂指数不同的光轴分布函数分别在x与y方向上的空间传递函数
图 5 幂指数不同的光轴分布函数分别在x与y方向上的空间传递函数
