1.Institute of Optics, College of Science, Zhejiang University of Technology, Hangzhou 310023, China 2.Institute of Optics, Department of Physics, Zhejiang University, Hangzhou 310027, China
Fund Project:Project supported by the National Key Research and Development Program of China (Grant Nos. 2016YFF0200206, 2017YFC0601602) and the National Natural Science Foundation of China (Grant Nos. 11604296, 61727821, 61478069, 61875175, 11404286)
Received Date:21 April 2019
Accepted Date:05 July 2019
Available Online:01 October 2019
Published Online:05 October 2019
Abstract:The technology of electro-optic modulation is one of the several methods of generating the Raman beams. The experimental system based on this method is simple and much easier to implement, and the environmental adaptability is strong as well. However, this kind of modulation technology will produce additional laser lines, which may affect the measurement accuracy of cold atom gravimeter. Based on a homemade transportable cold atom gravimeter, the influence of Raman sideband effect on the accuracy of cold atom gravimeter is investigated in this paper. We analyze in detail the relationship between Raman sideband effect and some experimental parameters, such as the height of Raman retro-reflection mirror, the time of free fall of the atoms, the detuning of Raman laser, etc. It is found that those parameters have a dominant influence on the measured gravity resulting from Raman sideband effect. Besides, it is also found that the gravity measurements will be sensitive again to some experimental parameters in the case of Raman sideband effect while these parameters are usually insensitive in case of laser system without sideband effect. Finally, we investigate the relationship between Raman sideband effect and Raman detuning, and presente a method of evaluating the gravity induced by Raman sideband effect. The experimental results in this paper can provide a reference for reducing the influence of Raman sideband effect on the accuracy evaluation of cold atomic gravimeter. Keywords:Raman laser/ atom optics/ atom interferometry techniques/ absolute gravity measurement
对于铷87 D2线, 基态能级差G约为6.834 GHz. 为了产生拉曼光, 一般调制频率设为G, 如图1(b)所示, 其他调制边带也会存在. 调制边带频差如果是G都可以产生拉曼跃迁, 以图1(c)为例进行说明, 载波(${{{k}}_2}$)和正一级调制边带(${{{k}}_1}$)是想要的拉曼光组合, 然而负一级调制边带(${{{k}}_3}$)与载波(${{{k}}_2}$)也是一组拉曼光组合, 也能与原子发生双光子过程, 这就是所谓的拉曼边带效应. 多余的边带对冷原子干涉绝对重力测量会产生重要影响, 详细的理论分析见参考文献[27], 边带引起的重力变化跟拉曼光反射镜到冷原子团中心的位置${z_{\rm{M}}}$、拉曼光失谐$\varDelta $、第一束拉曼脉冲作用时刻${t_0}$等参数密切相关. 本文中涉及到的实验大多基于冷原子干涉重力仪开展. 首先通过二维磁光阱(2D-MOT)制备一束低速的冷原子团, 并在二维输送光的推动下将其输送到三维磁光阱(3D-MOT)进行原子装载. 经过400 ms的装载, 三维磁光阱大约可装载109个原子, 然后利用偏振梯度冷却过程将这团冷原子温度降至5 μK. 进一步关断所有光场, 原子将在重力场作用下自由下落, 此时大部分原子都将处于F = 2的5个磁子能级上. 开启竖直向50 mG的磁场以定义量子化轴, 通过作用微波和拉曼选态π脉冲, 将原子制备到对磁场不敏感的$|F = 1, $${m_F} = 0\rangle $纯态上. 随后, 在${t_0}$时刻, 作用三束多普勒敏感的${{{\text{π}} /2 - {\text{π}} -{\text{π}} /2}}$拉曼脉冲序列使原子波包干涉, 并利用归一化探测方法实现原子布居数的探测. 整个测量周期耗时0.7 s, 测量重复率为1.4 Hz, 包括冷原子装载、偏振梯度冷却、量子态纯化、冷原子干涉以及归一化探测等过程. 3.拉曼边带效应实验结果拉曼边带效应对冷原子干涉绝对重力测量的影响是复杂且显著的. 利用传统的外腔式半导体激光器及光学锁相环技术可以产生无边带的拉曼光系统, 与利用EOM调制的有边带拉曼光系统可以进行比较, 基于同一套真空单元排除其他系统效应影响, 有无边带效应的实验结果如图2所示. 从图中可以看出, 在有边带效应的情况下, 重力测量值随不同T(拉曼脉冲的时间间隔)而变化, 幅度可达1400 μGal. 相反, 在无边带效应的情况下, 重力测量值幅度变化约10 μGal左右. 改变T测重力变化的方法是评估绝对重力的一种重要手段[31], 因此边带效应会直接影响冷原子重力仪的测量精度. 图 2 有无拉曼边带效应对冷原子重力仪测量结果的影响 Figure2. The influence of laser systems with and without sidebands on the measured results of cold atom gravimeter
虽然拉曼边带效应有相关的理论可以计算和解释[27], 但是实际实验中很难用理论精确算出边带效应引起的重力测量值变化. 拉曼边带效应是一个综合效应, 与许多实验参数密切相关, 比如拉曼光中各调制边带的功率比r、拉曼脉冲的时间间隔$T$、拉曼光反射镜到冷原子团中心的位置${z_{\rm{M}}}$、作用第一个${\text{π}}/2$脉冲的时刻${t_0}$、拉曼光失谐$\varDelta $等参数. 因为动态情况下的各调制边带的功率比、原子团位置等存在涨落, 很难在实验上精确测量这些参数, 所以理论计算只能提供粗略参考. 下面结合实验介绍这些参数对冷原子干涉重力测量的影响. 1)拉曼光反射镜到冷原子团中心的位置 在其他参数基本不变的情况下, 改变拉曼光反射镜到冷原子团中心的位置${z_{\rm{M}}}$, 分别在zM = 41.50 cm和zM = 40.58 cm两个位置得到了重力测量值随T的变化, 结果如图3所示. 实验发现, 不同拉曼反射镜位置, 重力测量值随T的变化关系完全不同, 且重力测量值变化幅度都较大(zM = 40.58 cm时, 重力测量值变化幅度达到2400 μGal). 为了验证测量的重复性, 在相同的拉曼光反射镜位置(zM = 41.50 cm), 在不同时间进行了多次测量, 结果如图4所示. 实验发现不同天的测量数据基本符合, 趋势相同, 但是局部仍存在不重合, 本实验说明冷原子干涉重力测量对拉曼反射镜位置比较敏感. 图 3 不同拉曼光反射镜位置重力测量值随$T$的变化. 实心三角形: zM = 41.50 cm的实验数据; 实心正方形: zM = 40.58 cm的实验数据 Figure3. Measurements of the gravity changes as a function of $T$ at two different positions of Raman retro-reflection mirror. Red and green scatters are the experimental data of the position of 41.50 cm and 40.58 cm respectively.
图 4 相同拉曼光反射镜位置下多次测量重力值随$T$的变化关系. 不同颜色代表不同天的测量数据 Figure4. Measurements of the functions of gravity changes as different $T$ when the positions of Raman retro-reflection mirror are the same. Different colors denote the experimental data measured at different days.
2)作用第一个${{{\text{π}} /2}}$脉冲的时刻${t_0}$ 通过独立改变第一个拉曼${{{\text{π}} /2}}$脉冲的作用时刻${t_0}$这一参数, 可以得到图5的实验数据. 随着${t_0}$的增加, 重力测量值的变化幅度可达1200 μGal, 在${t_0} = 8$ ms左右有一个最大值. 图 5 重力测量值随${t_0}$的变化关系 Figure5. The measured gravity changes as a function of ${t_0}$.
3)拉曼光失谐$\varDelta $ 实验上通过改变拉曼光失谐$\varDelta $可以得到重力测量值的变化, 测量数据如图6所示, 实验发现重力测量值随$\varDelta $基本上线性变化, 斜率约为–0.87(7) μGal/MHz. 图 6 重力测量值随拉曼光失谐$\varDelta $的变化. 红圆点: 实验数据; 红线: 线性拟合曲线 Figure6. The gravity variations with the changes of the detuning of Raman laser. Red dots: the experimental data; Red line: the linear fitted curve.
4)其他实验参数的影响 除了以上几个实验参数之外, 实验还发现边带效应会使原本对重力测量不敏感的实验参数变得敏感. 在扫描原子干涉条纹之前, 通常需要测量拉曼谱以确定正负频率扫描的共振频率位置, 为后续进行量子态纯化和干涉仪配置做准备. 在无边带效应的情况下, 按照先前的理论, 设置不同的共振频率, 只是选择不同速度群的原子, 对最终的重力测量影响不大. 然而, 在有边带效应的情况下, 选择不同速度群的原子, 相当于间接改变了拉曼光反射镜与原子团中心的位置, 从而导致重力测量值与该共振频率的设置点有关. 为了验证该效应, 首先扫描拉曼谱, 确定正负扫描时的两个共振峰位置${f_-}$和${f_ + }$, 前者是负扫描的中心共振峰, 后者是正扫描的中心共振峰, 它们是二配置重力测量方案必须要设定的参数[32]. 通过固定${f_ + }$, 改变${f_-}$可以研究该效应对重力测量的影响, 实验数据如图7(a)所示. 在共振峰中心位置附近变化正负20 KHz, 重力测量值的变化幅度约为120 μGal, 线性拟合的斜率约为–2.9(0.2) μGal/kHz. 同样, 利用无边带效应拉曼激光系统也可以进行类似实验, 结果如图7(b)所示, 改变${f_-}$重力仪的系统误差变化不大. 图 7 重力测量值随拉曼共振峰位置的变化 (a) 有边带效应; (b) 无边带效应; 圆散点: 实验数据; 黑线: 线性拟合曲线 Figure7. The gravity variations as a function of the positions of Raman resonant peak. (a) With sidebands effect; (b) without sidebands effect. Round scatters: the experimental data; Black line: the linear fitted curve.
冷原子重力仪实验中, 设置完${f_-}$和${f_ + }$后, 需要在这些频率点扫描拉比震荡曲线以确定拉曼${\text{π}}$脉冲的脉冲宽度. 然而, 由于拉曼${\text{π}}$脉冲通常比较短, 在10 μs左右, ${\text{π}}$脉冲的宽度不容易设置, 经常需要粗略设置. 另外, 考虑到拉曼光功率的漂移会引起${\text{π}}$脉冲的宽度变化, 因此有必要研究不同拉曼光脉冲配置对重力测量的影响. 实验上, 通过扫描拉比震荡确定${\text{π}}$脉冲的宽度是12 μs, 一般设置三拉曼脉冲时间序列为6 μs–12 μs–6 μs (${{{\text{π}}/2 - {\text{π}}- {\text{π}}/2}}$). 在有边带效应的情况下, 分别在正常脉冲配置两边设置5 μs–11 μs–5 μs, 6 μs–11 μs–6 μs, 6 μs–13 μs–6 μs, 7 μs–12 μs–7 μs四组实验. 实验结果如图8(a)所示, 不同拉曼脉冲配置会影响重力测量值, 重力测量值最大变化幅度可达40 μGal, 无明显变化规律. 然而, 基于无边带效应激光系统, 在不同拉曼脉冲配置下重力测量值变化不大, 实验结果如图8(b)所示. 图 8 不同拉曼脉冲配置对重力测量的影响 (a)有边带效应情况; (b)无边带效应情况 Figure8. The influence of different configurations of Raman pulses sequence on the measurement of gravity. (a) The case with sidebands effect; (b) the case without sidebands effect.
4.一种拉曼边带效应的评估方法由第三节实验可知, 拉曼边带效应对很多实验参数很敏感, 因而会对冷原子干涉绝对重力测量产生影响. 为了消除和减小其影响, 一种方案是通过外加调制器或FP腔滤波器直接消除多余的边带, 在源头上抑制边带效应带来的影响[28], 这种方法的最终效果取决于各边带的抑制比. 另外一种方案是选择合适的实验参数减小其影响, 比如设置合适的$T$和${v_0}$(第一个拉曼脉冲时的原子竖直速度)使原子干涉仪工作在对边带效应不敏感的点上[27]. 其实不管哪种方案, 对冷原子重力仪来讲, 都需要评估出拉曼边带效应对绝对重力测量产生的影响, 即该系统效应的大小需要评估. 由图6的实验结果知, 边带效应引起的重力测量值随拉曼光失谐$\varDelta $线性变化. 基于这一规律, 实验可以通过改变拉曼光反射镜与原子团中心之间的位置, 分别在两个竖直高度得到重力测量值随$\varDelta $的线性变化曲线, 则在两条拟合的直线交叉点A处, 可以认为该点对反射镜位置不敏感. 实验结果如图9所示, 两个反射镜位置(41.50 cm和40.58 cm)下分别可以得到重力测量值随拉曼光失谐的线性变化曲线, 交叉点A点的重力测量值约为454(30) μGal. 图 9 不同拉曼光反射镜位置重力测量值随拉曼光失谐的变化. 红点和黑点分别是41.50 和40.58 cm两个竖直位置下的实验数据, 红色和黑色直线分别是其线性拟合曲线 Figure9. Measurements of the gravity as a function of the detunings of Raman laser at the different positions of Raman retro-reflection mirror. red and black scatters are the experimental data for two different heights 41.50 cm and 40.58 cm respectively; Red and black lines are the corresponding fitted curves.
进一步, 考虑到改变第一个拉曼脉冲作用时刻t0有类似的效果, 我们测量了不同t0下重力测量值随拉曼光大失谐Δ的变化. 如图10所示, t0 = 8, 11, 17 ms情况下, 对实验数据进行了线性拟合, 得到的三条直线相交于一点, 则该点对第一个拉曼脉冲作用时刻不敏感. 图 10 不同t0下重力测量值随拉曼光大失谐Δ的变化. 黑圆点: t0 = 8 ms; 红三角: t0 = 11 ms; 蓝方块: t0 = 17 ms Figure10. The measured gravity as a function of the detunings of Raman laser with different t0. The black dots: t0 = 8 ms; The red triangle: t0 = 11 ms; the blue square: t0 = 17 ms.
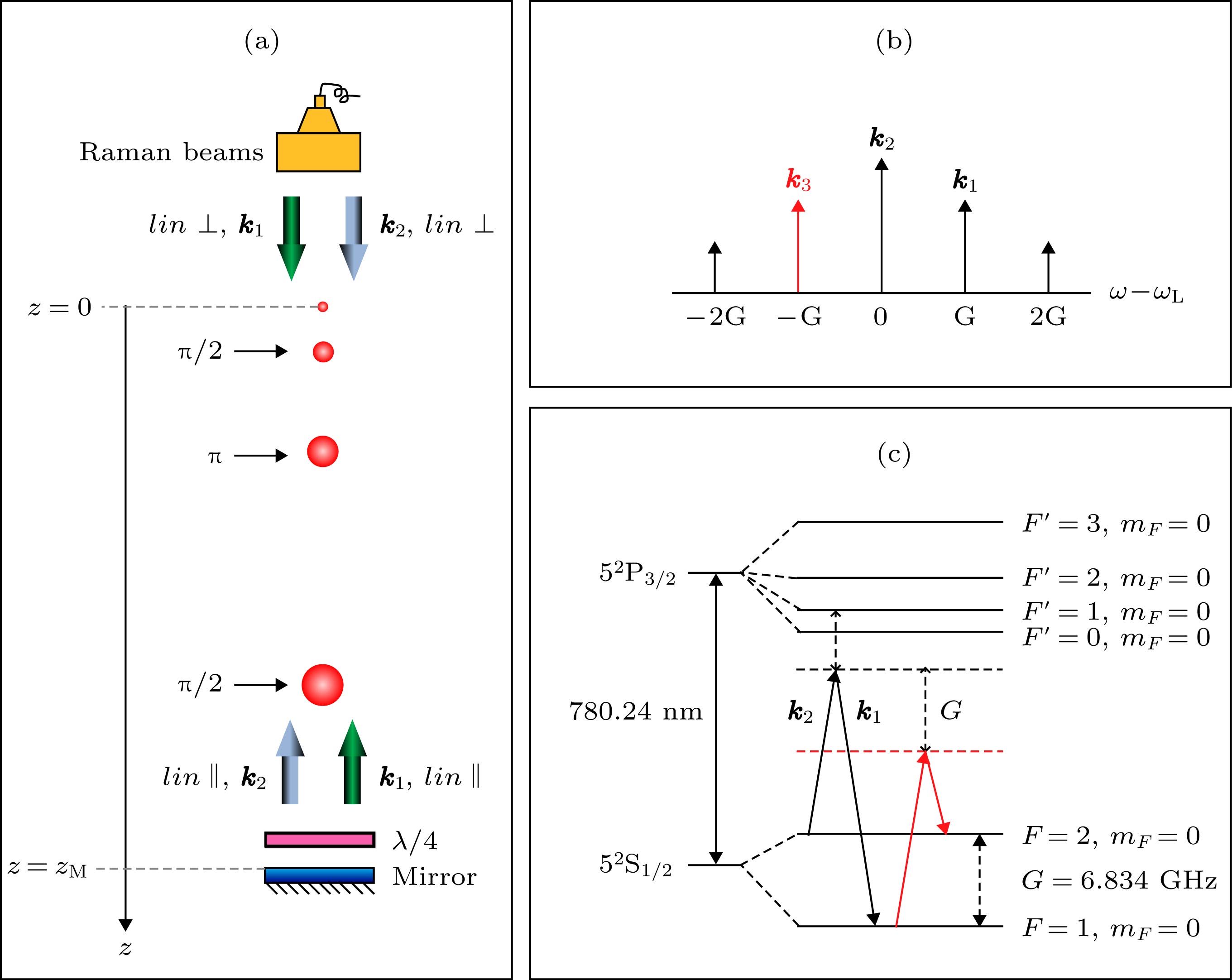 图 1 拉曼光边带效应示意图
图 1 拉曼光边带效应示意图










 图 2 有无拉曼边带效应对冷原子重力仪测量结果的影响
图 2 有无拉曼边带效应对冷原子重力仪测量结果的影响





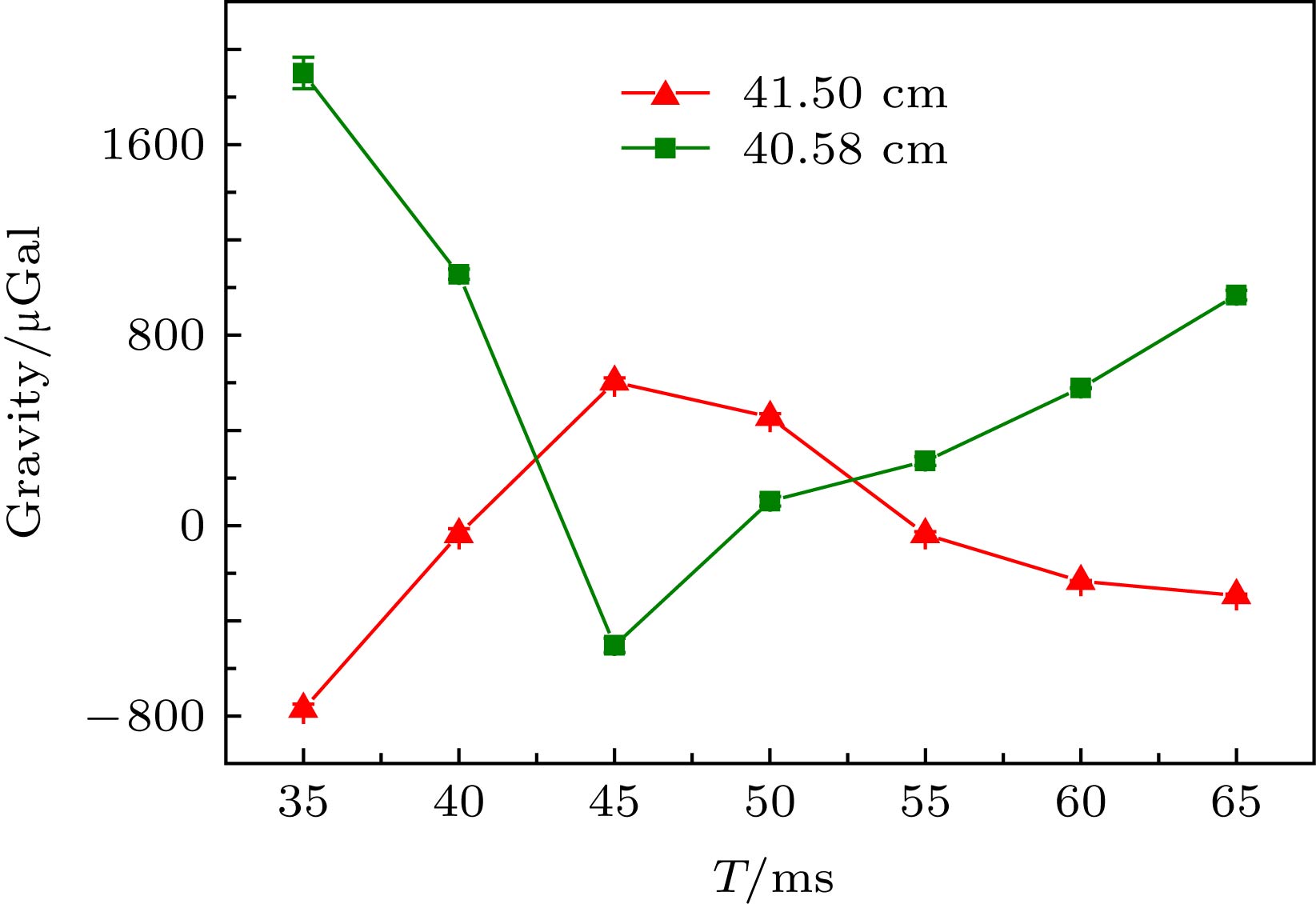 图 3 不同拉曼光反射镜位置重力测量值随
图 3 不同拉曼光反射镜位置重力测量值随

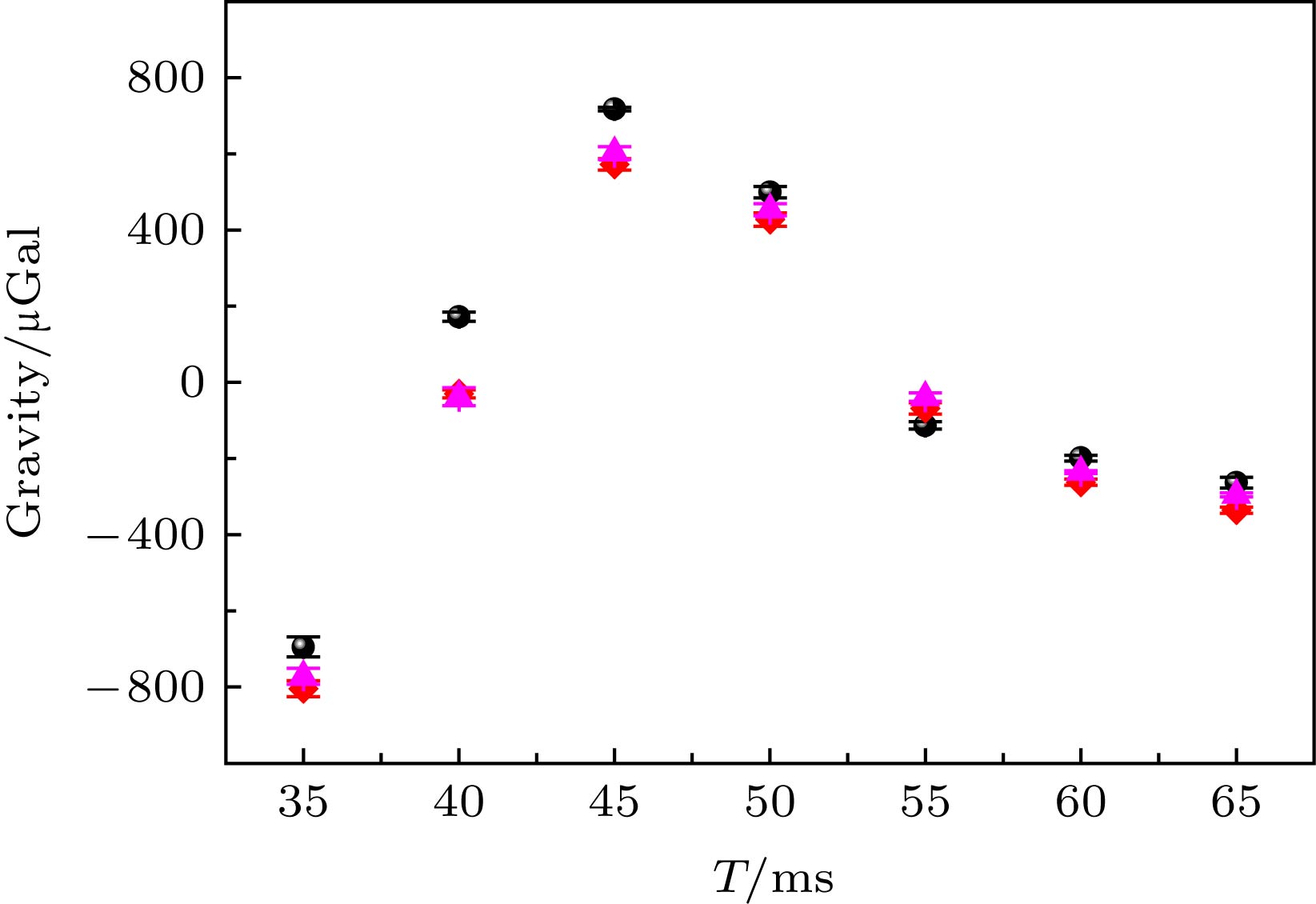 图 4 相同拉曼光反射镜位置下多次测量重力值随
图 4 相同拉曼光反射镜位置下多次测量重力值随







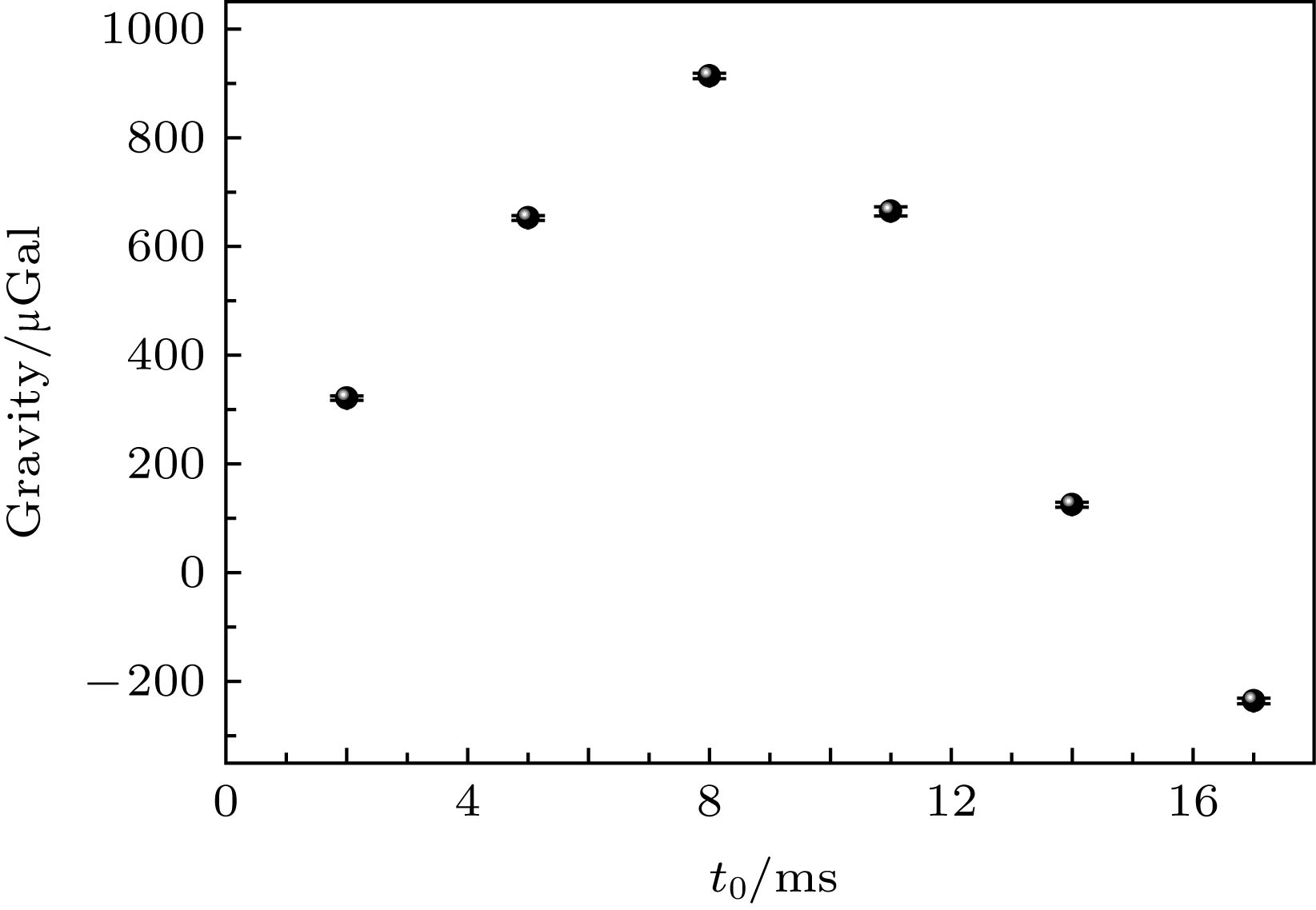 图 5 重力测量值随
图 5 重力测量值随




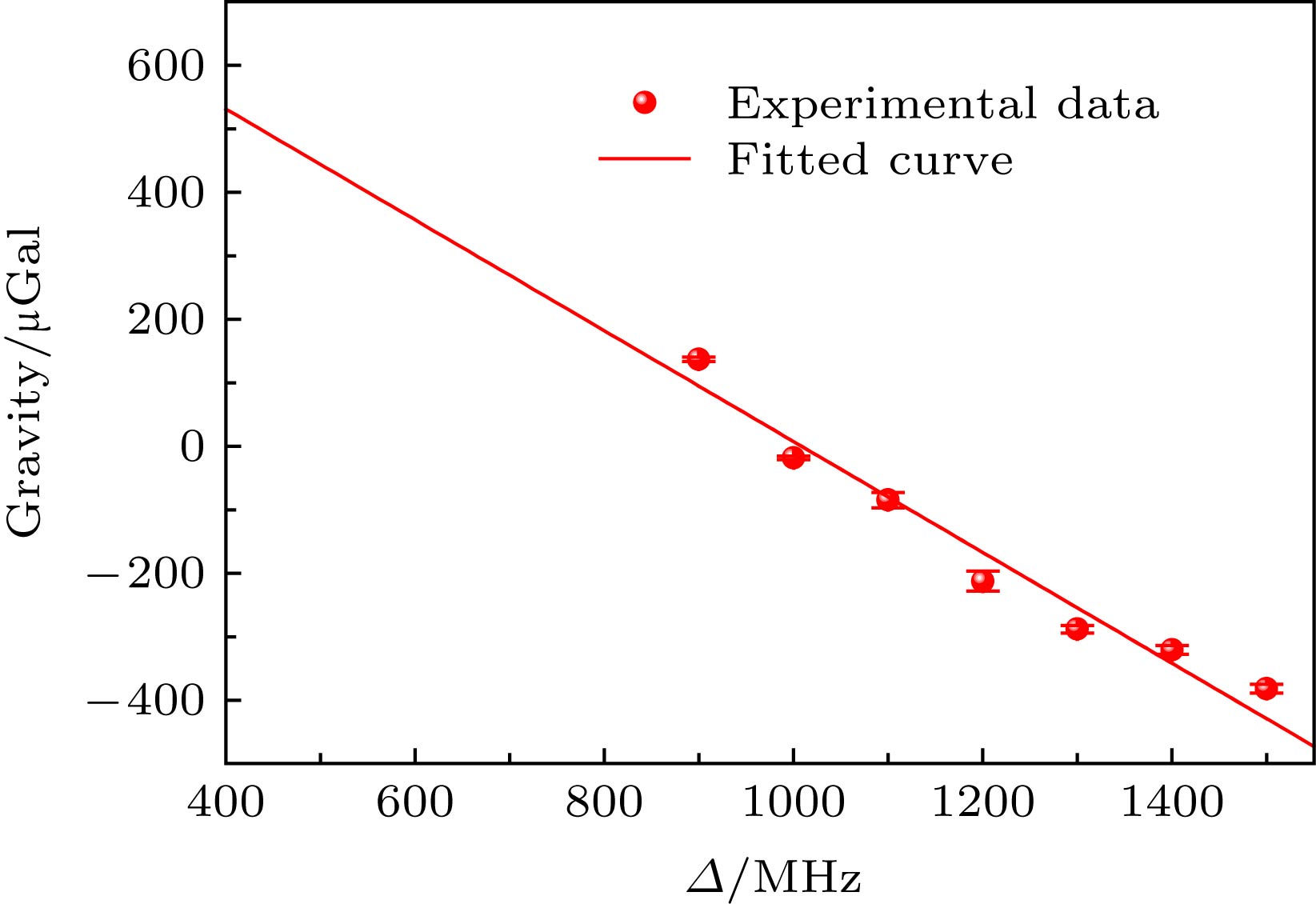 图 6 重力测量值随拉曼光失谐
图 6 重力测量值随拉曼光失谐





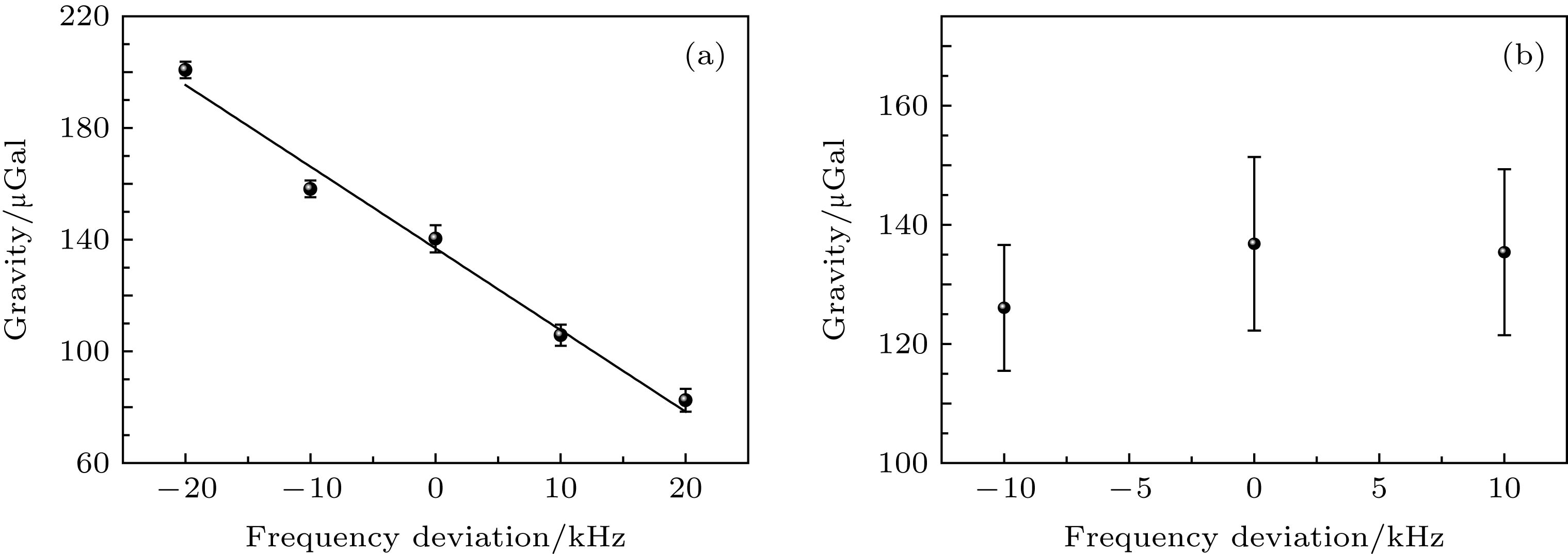 图 7 重力测量值随拉曼共振峰位置的变化 (a) 有边带效应; (b) 无边带效应; 圆散点: 实验数据; 黑线: 线性拟合曲线
图 7 重力测量值随拉曼共振峰位置的变化 (a) 有边带效应; (b) 无边带效应; 圆散点: 实验数据; 黑线: 线性拟合曲线







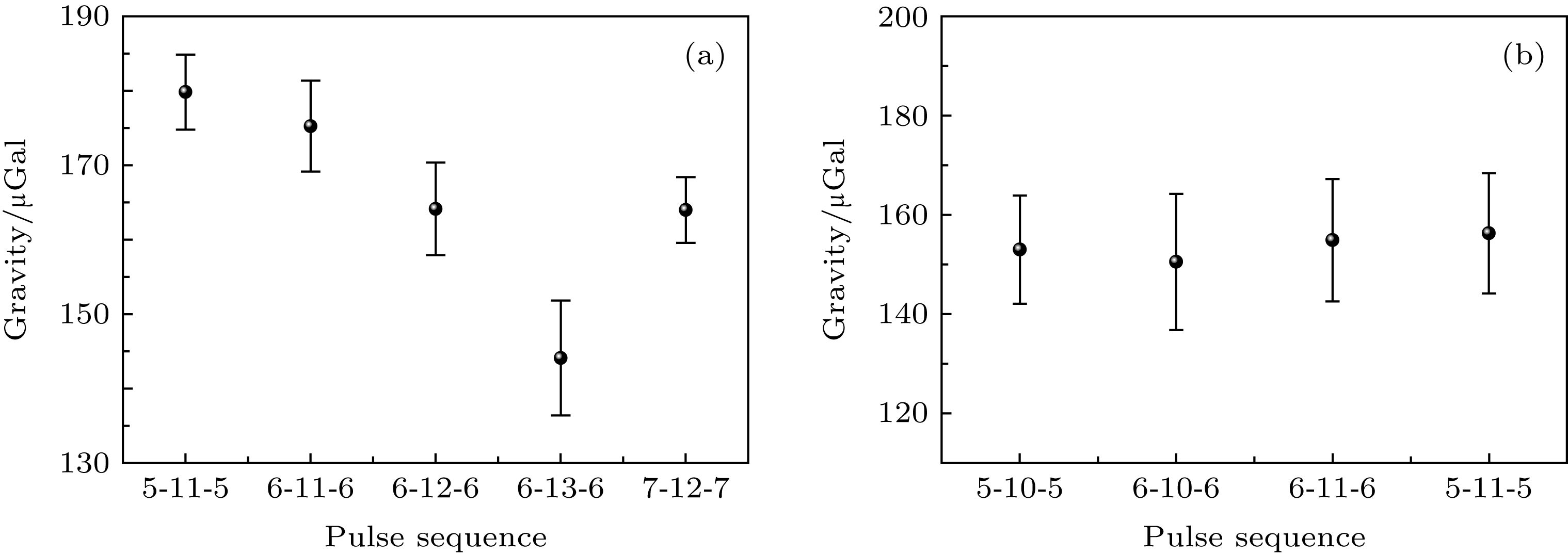 图 8 不同拉曼脉冲配置对重力测量的影响 (a)有边带效应情况; (b)无边带效应情况
图 8 不同拉曼脉冲配置对重力测量的影响 (a)有边带效应情况; (b)无边带效应情况



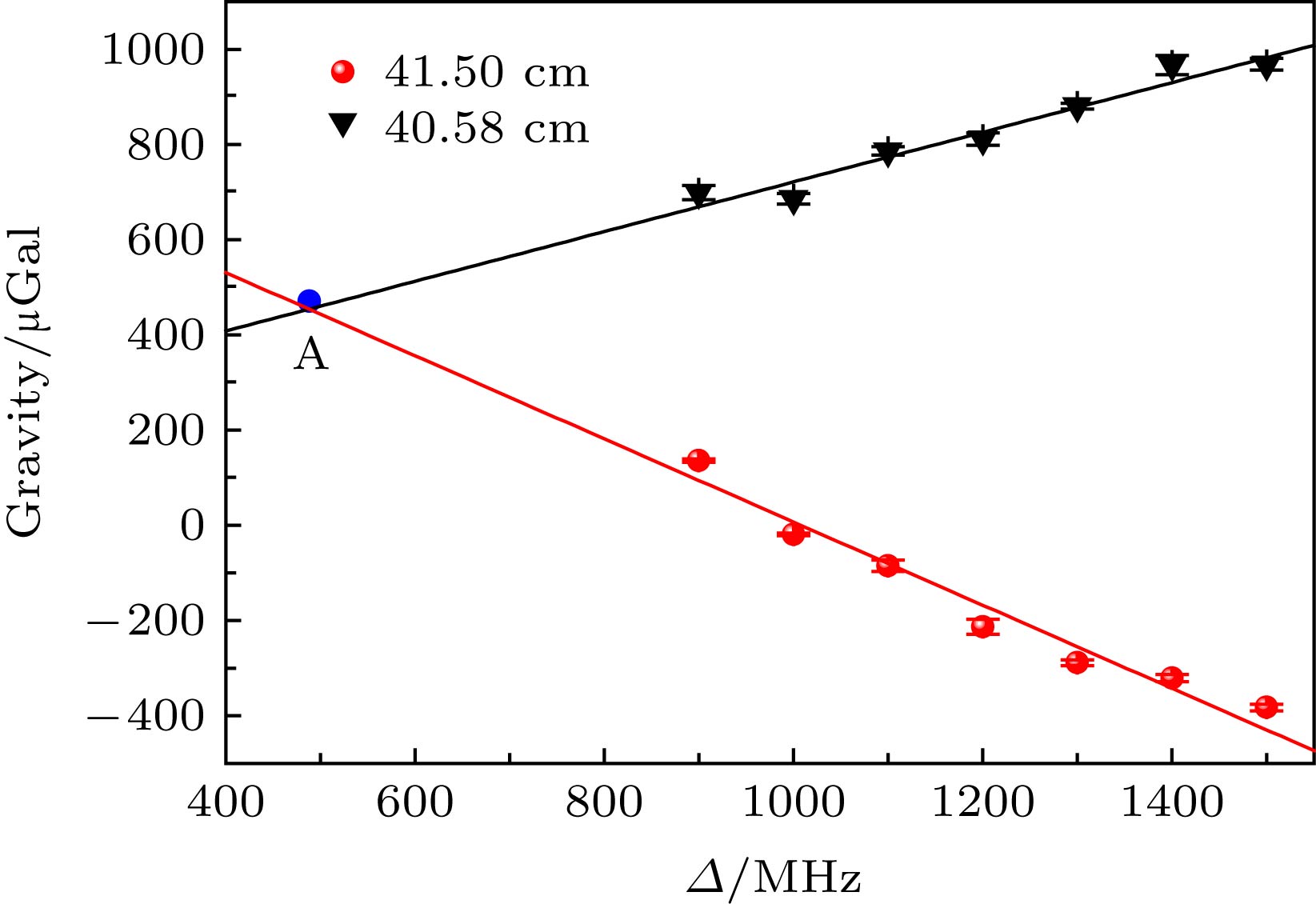 图 9 不同拉曼光反射镜位置重力测量值随拉曼光失谐的变化. 红点和黑点分别是41.50 和40.58 cm两个竖直位置下的实验数据, 红色和黑色直线分别是其线性拟合曲线
图 9 不同拉曼光反射镜位置重力测量值随拉曼光失谐的变化. 红点和黑点分别是41.50 和40.58 cm两个竖直位置下的实验数据, 红色和黑色直线分别是其线性拟合曲线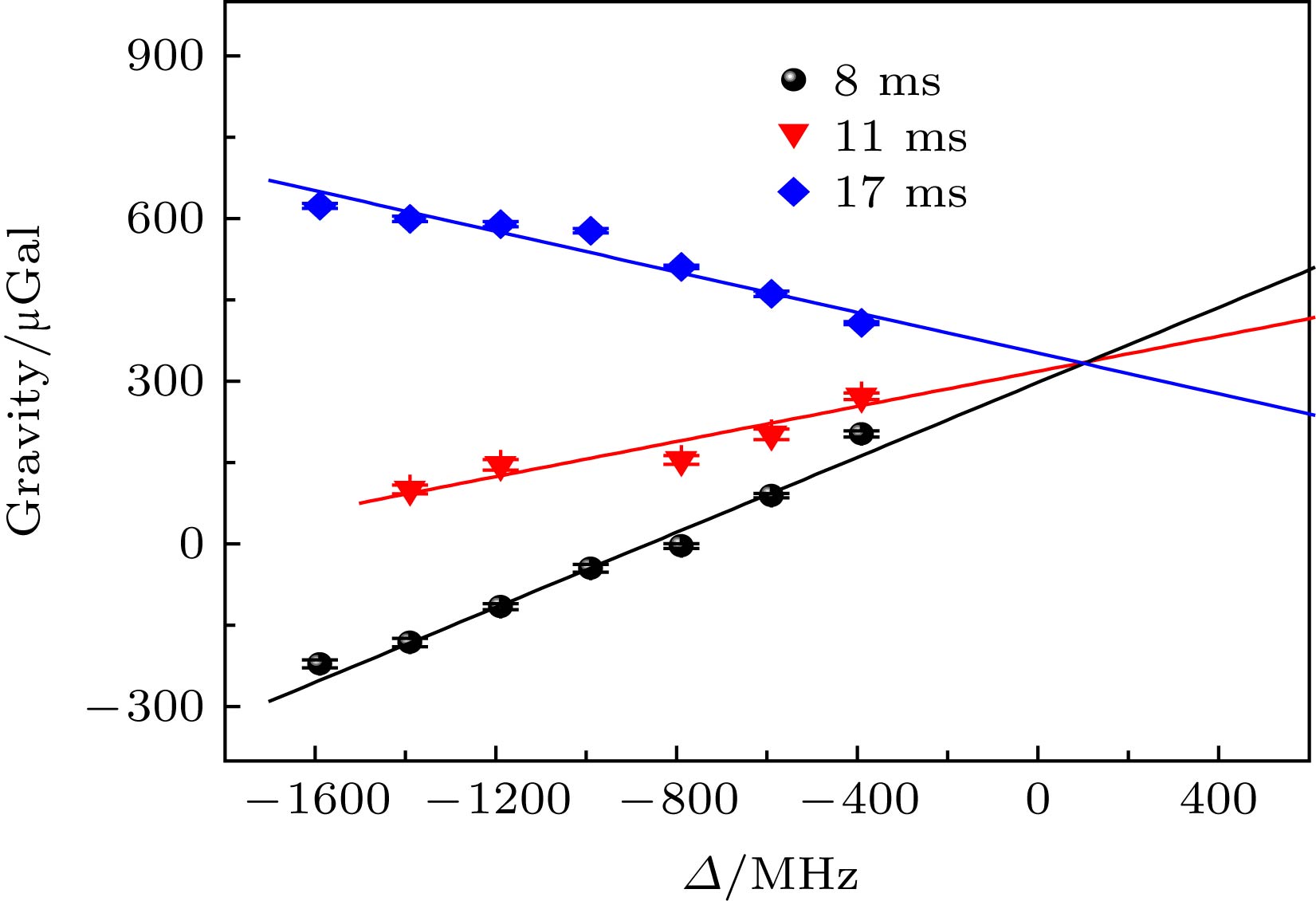 图 10 不同t0下重力测量值随拉曼光大失谐Δ的变化. 黑圆点: t0 = 8 ms; 红三角: t0 = 11 ms; 蓝方块: t0 = 17 ms
图 10 不同t0下重力测量值随拉曼光大失谐Δ的变化. 黑圆点: t0 = 8 ms; 红三角: t0 = 11 ms; 蓝方块: t0 = 17 ms





