1.State Key Laboratory of Acoustics, Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China 2.University of Chinese Academy of Sciences, Beijing 100049, China
Fund Project:Project supported by the State Key Program for Frontier Science Research of Chinese Academy of Sciences, China (Grant No. QYZDY-SSW-SLH005) and the National Natural Science Foundation of China (Grant Nos. 11804362, 11804364).
Received Date:20 February 2019
Accepted Date:23 April 2019
Available Online:01 July 2019
Published Online:05 July 2019
Abstract:The interference characteristics of normal modes in low-frequency broadband sound can be applied to source localization and environmental parameter inversion in shallow water. However, the identification ambiguity of interference normal mode pairs generally occurs in practical applications due to unknown source position, some weakly-excited normal modes, mismatched environmental model, etc. For the applications of a horizontal line array, a model-based processing approach is proposed to determine the orders of the interference normal mode pairs based on the intrinsic dispersion characteristics of interference normal mode pairs in the received signals and the range-independent properties of the array beam output angles. Firstly, the normal mode pair filtering is achieved by using the WARPING transform of the signal autocorrelation function in the element domain of the horizontal line array. Then, the arrival angles of the filtered interference normal mode pairs are estimated by using array beamforming. Finally, the estimated beam output angles are matched with the replica values computed by sound field model. The approach is verified by using the explosive pulse signals received by the seafloor-deployed 32-element horizontal line array at the North Yellow Sea in 2011. Furthermore, some simulations are involved to analyze the effects of environmental parameter mismatches including water sound speed profile, sea bottom parameters and water depth on the identification performance of interference normal mode pairs. The results show that the water depth is a major factor influencing the extracted values of the beam output angles of interference normal mode pairs. The approach might fail when the water depth mismatch exceeds 14% of the practical value. However, the effects of water sound speed profile mismatch and sea bottom parameters mismatch are negligible. The effect of signal-to-noise ratio in the element domain on a horizontal line array is also simulated in order to analyze the limitation of identification performance, which shows that the required signal-to-noise ratio in the element domain should be more than 2 dB. Keywords:shallow water waveguide/ interference normal mode pair/ WARPING transform/ modal identification/ horizontal line array
$X_{mn}^{}\left({ f }\right){\rm{ = 2}}A_n^{}\left({ f }\right)A_m^{\dagger }\left({ f }\right)/\sum\limits_{m = 1}^M {{{\left| {{A_m}\left({ f }\right)} \right|}^2}} $
图 4 WARPING变换频谱 (a)全部信号; (b)距离25.26 km 处接收的数据 Figure4. WARPING transform spectrum: (a) All signals; (b)the signal at range of 25.26 km.
图 5 距离25.26 km处信号两组干涉简正模成分波束输出角度提取值与理论值的对比 (a)第一组干涉简正模; (b)第二组干涉简正模 Figure5. Comparison of the measured and computed beam output angles of the normal mode pairs at the range of 25.26 km: (a) The first normal mode pair; (b) the second normal mode pair.
按照上面的步骤, 对所有的信号弹进行处理, 结果见图6—图8. 图6(a)给出了所有投弹数据沿着图4(a)中第一个峰值(黑色点线)进行简正模阶数判别的结果. 根据(15)式的判别准则, 统计得到阶数判断的概率分布如图6(b)所示, 可以看出该峰值是由(1, 2)阶简正模成分干涉贡献的. 图 6 (1, 2)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果 Figure6. The discrimination of normal mode pair (1, 2) and its probability: (a) The discrimination of result; (b) probability.
图 8 (1, 4)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果 Figure8. The discrimination of normal mode pair (1, 4) and its probability: (a) The discrimination of result; (b) probability.
图7(a)是对实验的所有投弹数据沿着图4(a)中黑色加号实线进行简正模阶数判别的结果, 图7(b)是其概率统计结果, 可以看出该干涉简正模的阶数是(1, 3)阶. 图 7 (1, 3)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果 Figure7. The discrimination of normal mode pair (1, 3) and its probability: (a) The discrimination of result;(b)probability.
其中S和N分别表示相同带宽内信号和噪声的功率. 图10(a)给出了不同信噪比条件下蒙特拉罗实验50次概率最大的干涉简正模成分波束输出角度实际提取值与理论计算值角度差的均方根值与信噪比的关系, 理论计算(1, 2)与(2, 3)阶的角度差均方根值的1/2间距是0.22°. 当(1, 2)阶干涉简正模角度提取值与理论值的均方根小于其与相邻干涉简正模角度差理论值间距的1/2时认为干涉简正模阶数判别是有效的. 图10(b)给出了信噪比为2 dB时(1, 2)阶干涉简正模的提取值与理论计算值, 黑色实线是理论值, 红色点线是提取值, 蓝色虚线是(1, 2)阶干涉简正模与相邻干涉简正模角度差的1/2界限. 可以看出, 利用90 Hz以下信号在信噪比大于2 dB时能正确地判断阶数. 由于不同组简正模组合的角度差随着频率的升高变小, 在利用(15)式的准则进行判断时, 频率高于90 Hz时由于受噪声因素的扰动, 存在误判的可能性增大. 图 10 信噪比对干涉简正模成分波束输出角度提取值的影响 (a)角度差均方根值与信噪比关系; (b) 2 dB时角度提取值与理论值 Figure10. The effect of SNR on the beam output angles of the normal mode pair: (a) The mean square error of the angle varies with SNR; (b) the extracted and theretical values at 2 dB.















































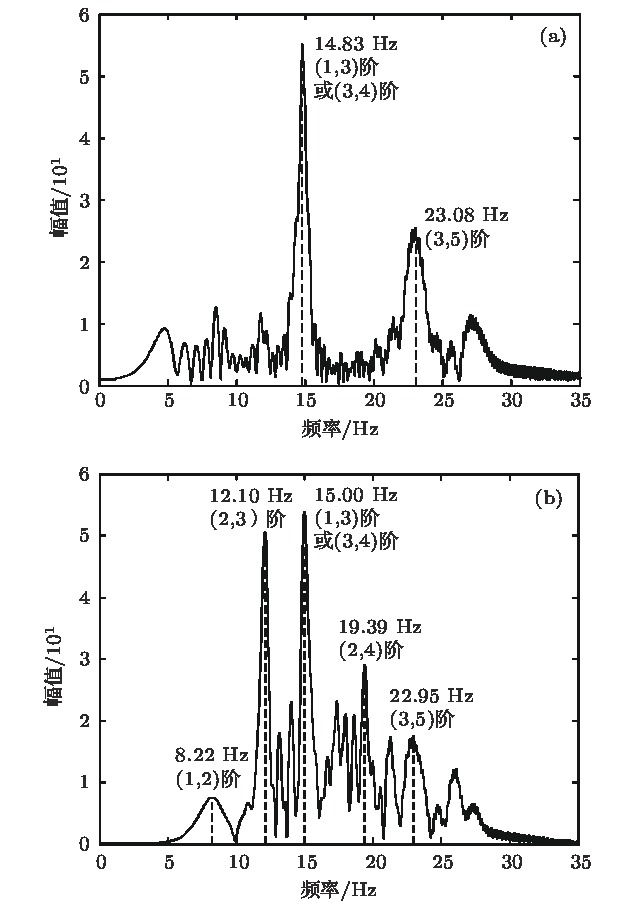 图 1 不同源深时接收信号自相关函数WARPING变换谱图 (a)源深33 m; (b)源深60 m
图 1 不同源深时接收信号自相关函数WARPING变换谱图 (a)源深33 m; (b)源深60 m

























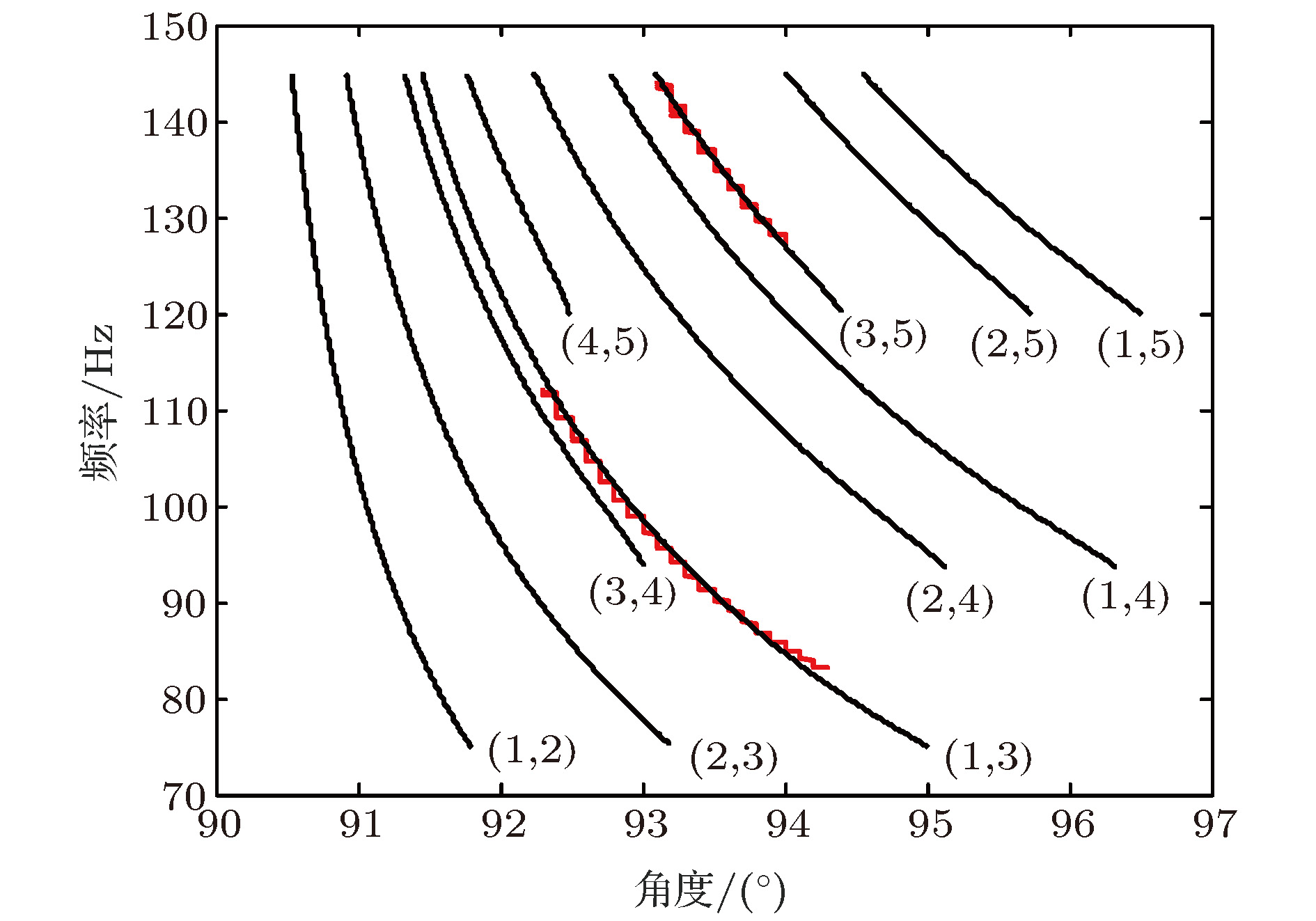 图 2 干涉简正模波束输出角度理论值与提取值的对比
图 2 干涉简正模波束输出角度理论值与提取值的对比
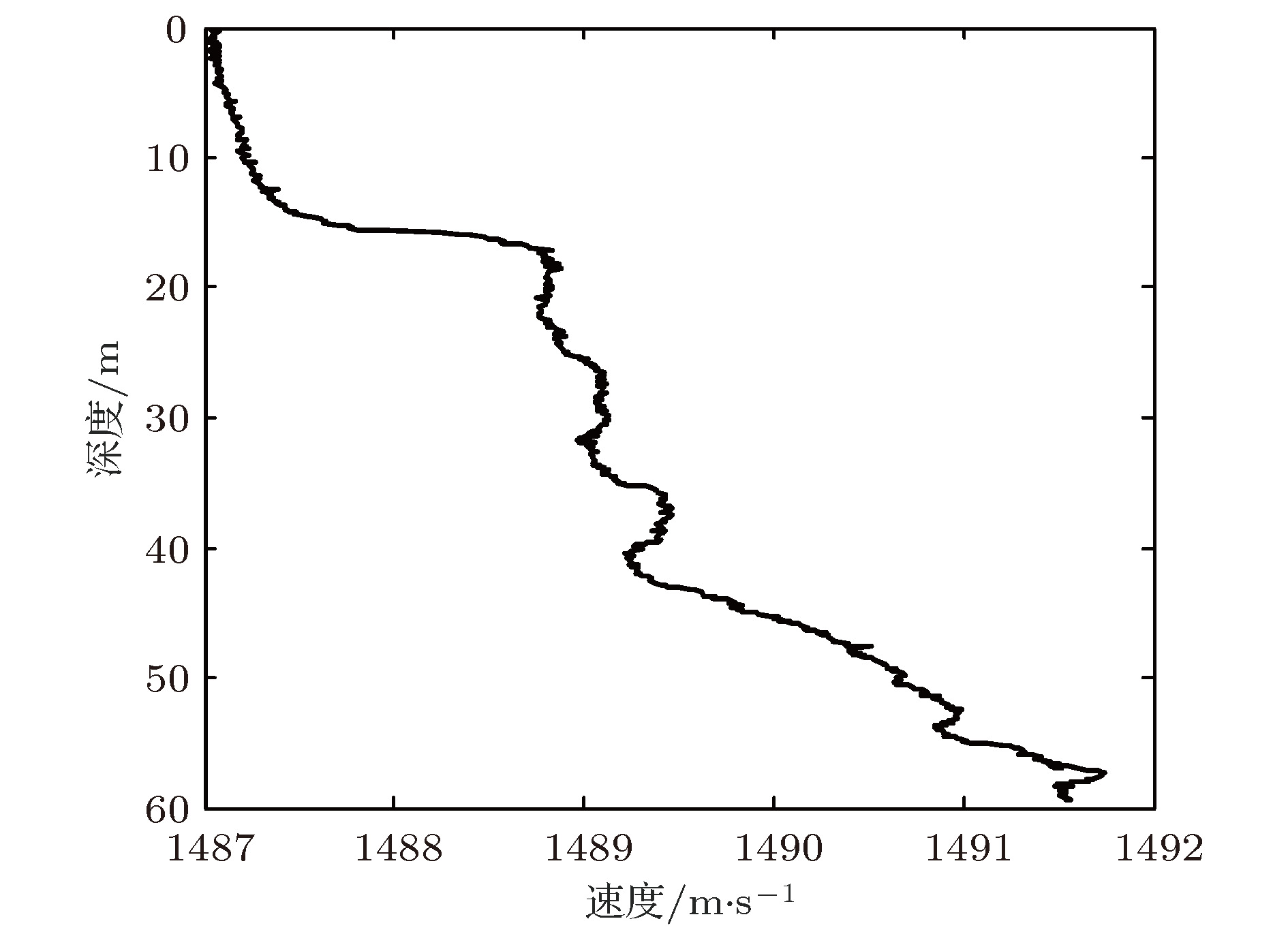 图 3 声速剖面
图 3 声速剖面 图 4 WARPING变换频谱 (a)全部信号; (b)距离25.26 km 处接收的数据
图 4 WARPING变换频谱 (a)全部信号; (b)距离25.26 km 处接收的数据 图 5 距离25.26 km处信号两组干涉简正模成分波束输出角度提取值与理论值的对比 (a)第一组干涉简正模; (b)第二组干涉简正模
图 5 距离25.26 km处信号两组干涉简正模成分波束输出角度提取值与理论值的对比 (a)第一组干涉简正模; (b)第二组干涉简正模 图 6 (1, 2)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果
图 6 (1, 2)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果 图 8 (1, 4)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果
图 8 (1, 4)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果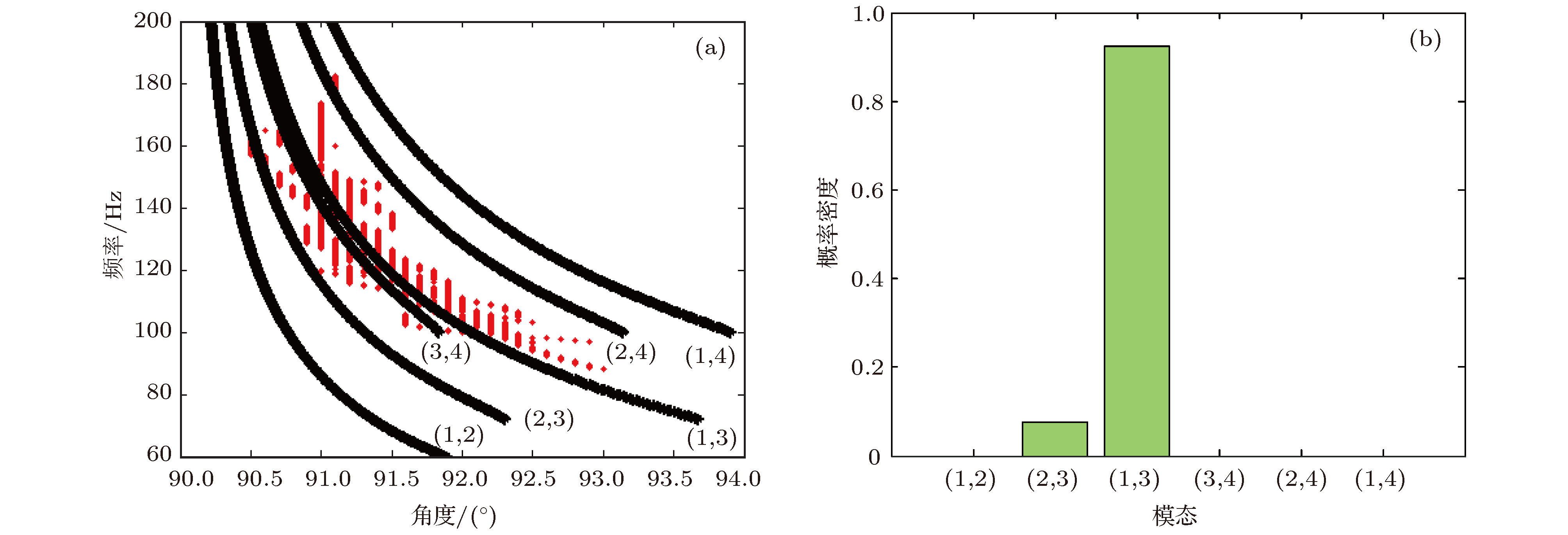 图 7 (1, 3)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果
图 7 (1, 3)阶干涉简正模判别结果及其概率 (a)判别结果; (b)概率统计结果


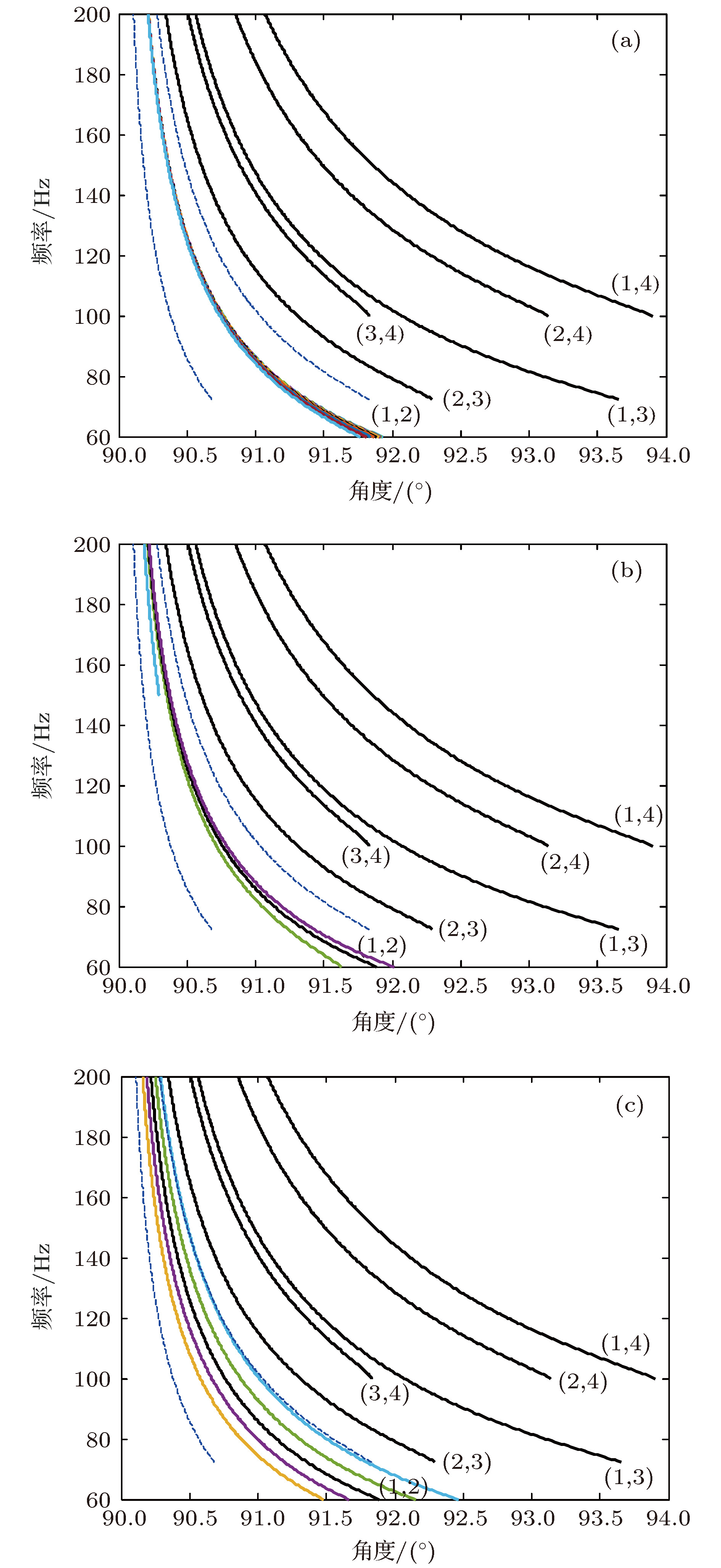 图 9 环境参数失配对(1,2)阶干涉简正模波束输出角度值的影响 (a)海水声速剖面失配; (b)海底参数失配; (c)海深失配
图 9 环境参数失配对(1,2)阶干涉简正模波束输出角度值的影响 (a)海水声速剖面失配; (b)海底参数失配; (c)海深失配 图 10 信噪比对干涉简正模成分波束输出角度提取值的影响 (a)角度差均方根值与信噪比关系; (b) 2 dB时角度提取值与理论值
图 10 信噪比对干涉简正模成分波束输出角度提取值的影响 (a)角度差均方根值与信噪比关系; (b) 2 dB时角度提取值与理论值




