引言
桥梁颤振是结构从气流中吸取的能量大于结构阻尼所消耗的能量时发生的扭转(或扭、弯耦合)振动, 其振动的振幅随时间不断加大, 形成发散的自激振动, 使结构遭受直接破坏. 提出适应现代越来越轻型化的新型桥梁的颤振控制方法, 为今后桥梁建设提供技术储备很有必要.
Larsen和Larose[1]研究了Tacoma大桥的浅H型截面在扭转振荡中旋涡的形成及运动过程, 以及对截面上下两侧压力分布的影响, 提出了旋涡脱落模式造成颤振的机制. 当桥面扭转振动时, 会对其尾流产生影响, 形成各种新的旋涡脱落模式, 这些旋涡模式与振幅、振频等参数密切相关. 反之, 新的旋涡脱落模式往往带来气动升力、阻力和力矩的幅值和频率的变化, 从而影响物体的振动. 对于有限厚度板, 颤振过程与旋涡脱落过程相互耦合, 因此颤振的流动控制与旋涡脱落控制具有密切联系.
桥梁颤振受多种因素影响, 包括长宽比、结构与空气密度比、桥梁刚度, 结构阻尼以及端部条件等, 进行系统性控制研究极为困难. 因此进行合理的简化十分必要. 风引起的桥梁、高层大楼的振动, 海洋石油平台减振板在海流中的振动, 都可以用板或薄矩形柱作为简化模型, 进行实验和数值研究.
颤振可分为单模态振动和多模态振动两种. 单模态颤振较为简单, 即工程结构以同一个振频振动, 且振幅往往沿展向变化较缓慢. Bourguet等[2]研究了多模态激发的情况, 发现在锁频区域附近展向不同位置的振频不同, 但是在两个节点之间, 涡激振动也是局部单频振动事件, 流体以局部单振频输送能量给结构体. Law等[3-4]研究了悬索桥颤振尾流, 发现在扭转第一模态和一些横弯模态振动之下, 出现旋涡脱落; 并发现扭转颤振至少在振幅最大的中间三分之一展长上是展向相关的. 因此在展向相关尺度较大的情况下, 应用二维模型, 采用最大振幅及该处振频, 进行模拟研究是合理的.
Carberry等[5]观察到强迫振动与自由振动的涡脱模式、应力和相位的变化都具有很强的相似性. Morse和Williamson[6]利用强迫振动实验得到的升阻力结果进行自由振动预测, 并与Govardhan和Williamson[7]自由振动实验的响应和涡脱落模式比较, 他们观察到强迫振动和自由振动的结果之间具有一致性. 由于强迫振动影响参数少且易于实验中控制, 因此在颤振导数等研究中常用其取代自由振动实验.
工程中桥跨结构绕流的雷诺数Re = 106 ~ 107, 大多数风洞实验达不到这么高的要求. Bruno和Fransos[8]研究了 Re 对桥梁颤振导数的影响, 得到公式
$${F_i} = {F_{i0}} + frac{{{a_i}{U_{ m{r}}}}}{{{Re} }} + frac{{{b_i}U_{ m{r}}^2}}{{sqrt {{Re} } }}$$  |
式中, Fi 为某颤振导数, Fi0为雷诺数无关项, ai, bi为常数, 不同的颤振导数其数值不同, 一般ai为1的量级, bi为更小的量级. 折减风速
m{r}}} = {V_infty }/({f_{
m{e}}}H)$

Matsuda 等[9]研究了Re对桥梁颤振导数与颤振临界风速的影响. 用Re = 2 × 104 ~ 4 × 104, 3 × 105 ~ 1.0 ×106和1.5 × 106 等3种不同雷诺数模型实验得到的颤振导数计算的颤振临界风速分别为70 m/s, 70 m/s和75 m/s, 三者差别不大. 对于强迫振荡问题, 振幅与振频(折算风速)的影响需要首先考虑, Re的影响与其相比是属于第二位的.
长期以来, 人们对桥梁消除颤振做了很多研究. 颤振的控制可分为结构控制和流动控制两种类型. 结构控制通过增大结构的机械阻尼或增大结构刚度(以抵消气动负刚度效应)达到减振的目的. 流动控制是在不改变结构基本形状的前提下, 施加小的局部装置对流动进行干预, 从而改变结构的气动力分布, 达到抑制颤振的目的. 板的流动控制方法有: (1)在板上开缝, 调节两侧的空气压差, 抑制颤振和驰振[10-13]; 在桥梁中间沿展向开缝隙, 实验证明在一定范围内颤振临界风速随缝隙宽度的增大而增大. (2)减少展向相关性, 抑制颤振[14-16]; 在尾缘沿展向每隔一定距离设置凸起薄片, 控制参数包括薄片宽度、高度和间距. 优化的薄片布置增加背压, 抑制颤振. (3)竖直隔板、护板、导流片[17]; 在桥面中间沿展向设置中央隔板, 在前缘和尾缘设置导流板. (4)风嘴(wind fairing)[18], 将矩形截面桥梁的前后缘削尖, 使其趋近于流线体. (5)喷射气体干扰流场[19-22]. (6)表面振动[23-24]; 机翼负压面璧面周期性变形. (7)前缘和尾缘襟翼、升力面[25-28]; 在桥跨前缘和尾缘分别设置绕轴旋转振荡的被动控制襟翼, 用襟翼的拍动抑制桥跨结构不稳定性. (8)可变形机翼[29]. (9)反馈控制[30]. 综上所述, 已有的颤振控制(包括反馈和非反馈主动控制及被动控制)方法主要采用的控制装置大都与主体结构连接在一起, 从流动控制观点看, 在很多情况下, 最佳控制效果往往发生在控制装置与主体结构分离之时. 且很多用于机翼颤振的主动控制方法(特别是反馈控制方法), 难以用于尺度大得多的桥梁颤振控制. 从实际应用考虑, 应尽量采用被动离体的方法进行颤振控制研究.
根据文献[5-6]的研究可以推论, 如果某种方法可以在较大参数范围内抑制强迫振荡板的尾流旋涡脱落, 并减小脉动升力和力矩, 则这种方法一定能够抑制板的颤振.
本文采用窄条控制件方法, 对强迫旋转振荡板尾流进行抑制. 在板的两侧对称地放置两个窄条控制件, 根据工程实际, 控制件分别放在板的前、后缘以及中间位置进行研究. 板宽厚比采用研究最多的塔科马大桥的比例B/H = 5. 根据Shimada和 Ishihara[31]的综述研究, 宽厚比B/H = 2.8 ~ 6情况下, 流体绕过柔性板, 所激发板的振动, 主要是扭转颤振.
控制件的方法由Staykowski和Sreenivasan[32]提出. 他们在静止的主圆柱下游放置一个尺度很小的圆柱, 在主圆柱雷诺数 Re < 100条件下, 成功抑制了主尾流的旋涡脱落. 此后文献[33-36]在钝体上游放置小圆柱, 通过小圆柱尾流对钝体边界层或者分离剪切层的影响, 达到抑制钝体旋涡脱落的目的. 但这些仅限于对静止钝体, 且雷诺数较低情况下的控制研究. 强迫振荡柱体尾流控制方面的研究较少, 文献[37-40]采用单窄条控制件对流向振荡圆柱尾流控制做了研究. 曹梦圆等[41]还用单窄条对横向振荡圆柱尾流旋涡脱落的影响做了研究, 取得一定控制效果.
1.
实验与数值模拟方法简述及结果对比
1.1
实验方法
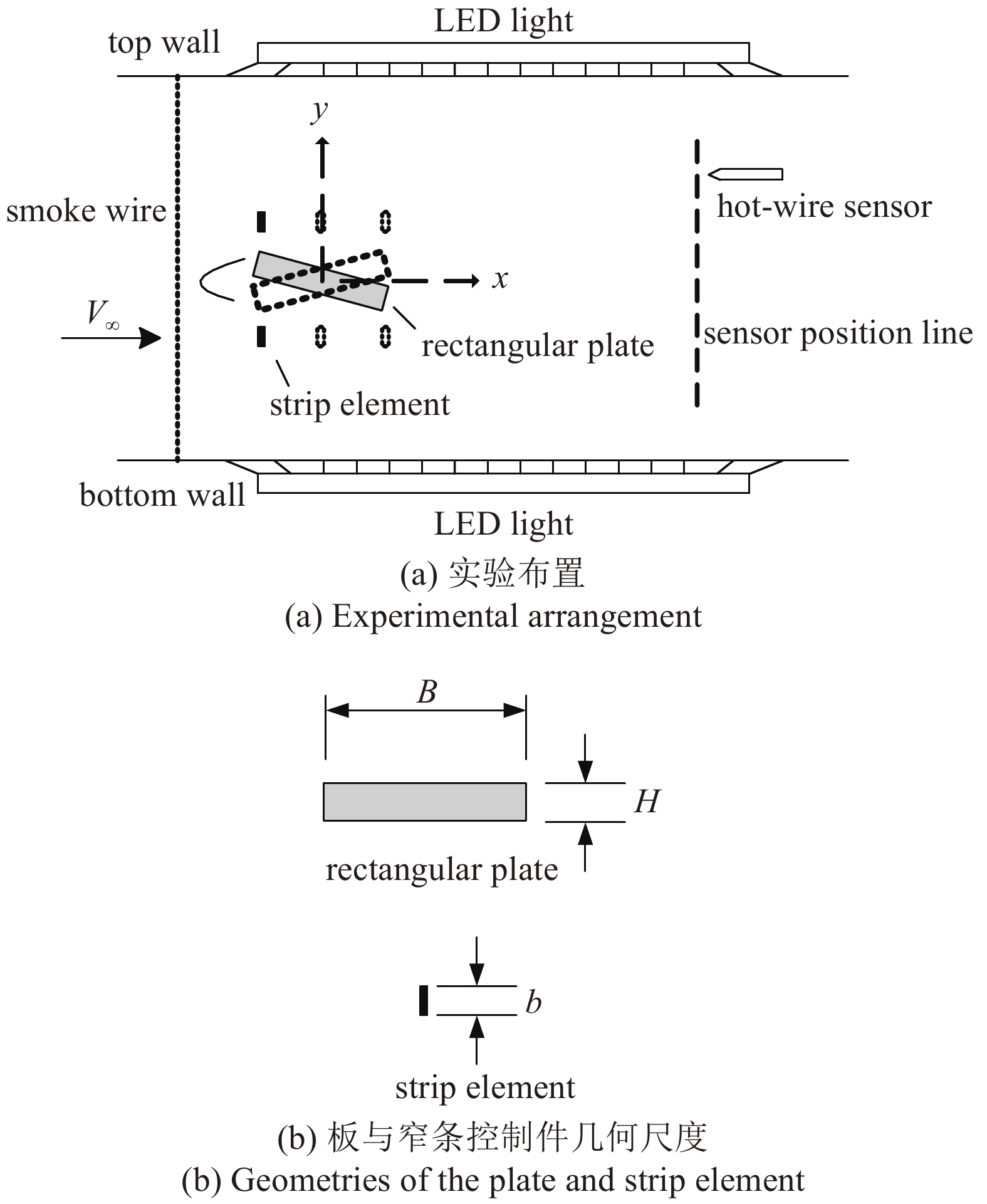
实验在中国计量大学回流式风洞中进行, 风洞实验段长2.0 m, 宽和高均为0.6 m, 可提供速度范围为0.6 ~ 30 m/s, 湍流度小于0.5% 的均匀来流. 矩形板由亚克力板制成, 长0.55 m, 宽B = 0.15 m, 厚H = 30 mm, 宽厚比B/H = 5. 板内沿长度方向嵌有一个直径25 mm的有机玻璃圆轴, 轴线平行于板长方向, 轴的一端延伸出板外. 风洞的前后侧壁由透明有机玻璃构成, 后壁开有一直径25 mm的圆形槽口. 位于板外的圆轴垂直地穿过槽口, 并与风洞外的旋转振荡装置连接. 振荡装置由伺服电机, 转盘和连杆机构构成, 通过调节连杆机构与转盘的连接位置改变矩形板振荡幅度, 通过调节伺服电机转速改变板的振荡频率.
窄条控制件由铝合金制成, 其长度0.6 m, 厚度3 mm, 宽度b = 10 mm, 窄条宽度与板的厚度比b/H = 0.33. 两个相同的窄条对称地放置于矩形板上下两侧, 窄条长度方向与板旋转轴平行. 窄条表面(长 × 宽)与来流方向的夹角对控制效果具有影响. 根据Shao和Wei[42]的研究, 控制效果与窄条迎风面积成正比. 本文选择具有最佳控制效果的情况, 即窄条面与来流垂直放置. 窄条流向位置如图1(a)所示, 分为3种情况, 分别为x/B = ?0.5, 0及0.5. 窄条纵向位置以

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
模型与实验装置示意图
Figure
1.
Sketch of test model and experimental equipment
 下载:
下载: 全尺寸图片
幻灯片
应用烟线技术进行流动显示, 观察不同工况下振荡板尾流旋涡脱落状态. 如图1(a)所示, 在矩形板上游一定位置竖直地放置一根直径40 μm的钼丝, 钼丝两端通过导线与充电电容器两极连接. 在钼丝上涂抹分析级甘油, 电容器放电加热钼丝, 使甘油挥发成烟雾. 来流吹过钼丝, 烟雾在展向中间断面形成二维烟流, 烟流绕过板, 在下游清晰地显示出尾涡结构. 尾涡结构的演化状况由高速像机 Photron FASTCAM Mini UX50以500 FPS的速度拍摄记录.
在矩形板下游x/H = 12.5处沿Y轴在y/H = ?5.67 ~ 5.67的区间内均匀布置35个测量点, 用DANTECT Streamline热线风速仪热线探头, 逐点测量尾流脉动速度. 每个点的采样时间为10 s, 采样频率为512 Hz, 脉动信号频率分辨度为0.1 Hz. 表1为振幅5°、振频1 Hz且控制件在尾缘时, 其中某一测点的平均速度U、脉动速度均方根u′及功率谱主峰峰值P随测量时间T (数据点数N)的变化. 可知10 s采样时间足以得到精确的统计量.
表
1
热线测量时间对测量结果的影响
Table
1.
Influence of hot wire measurement time on measurement results
table_type1 ">
| T/s | N | P/(N·m·s?1) | U/(m·s?1) | μ′/(m·s?1) |
| 5 | 2560 | 2.20276 | 1.48107 | 0.09584 |
| 8 | 4096 | 2.20117 | 1.48045 | 0.09659 |
| 10 | 5120 | 2.20236 | 1.48092 | 0.09617 |
下载: 导出CSV
|显示表格
1.2
数值模拟方法
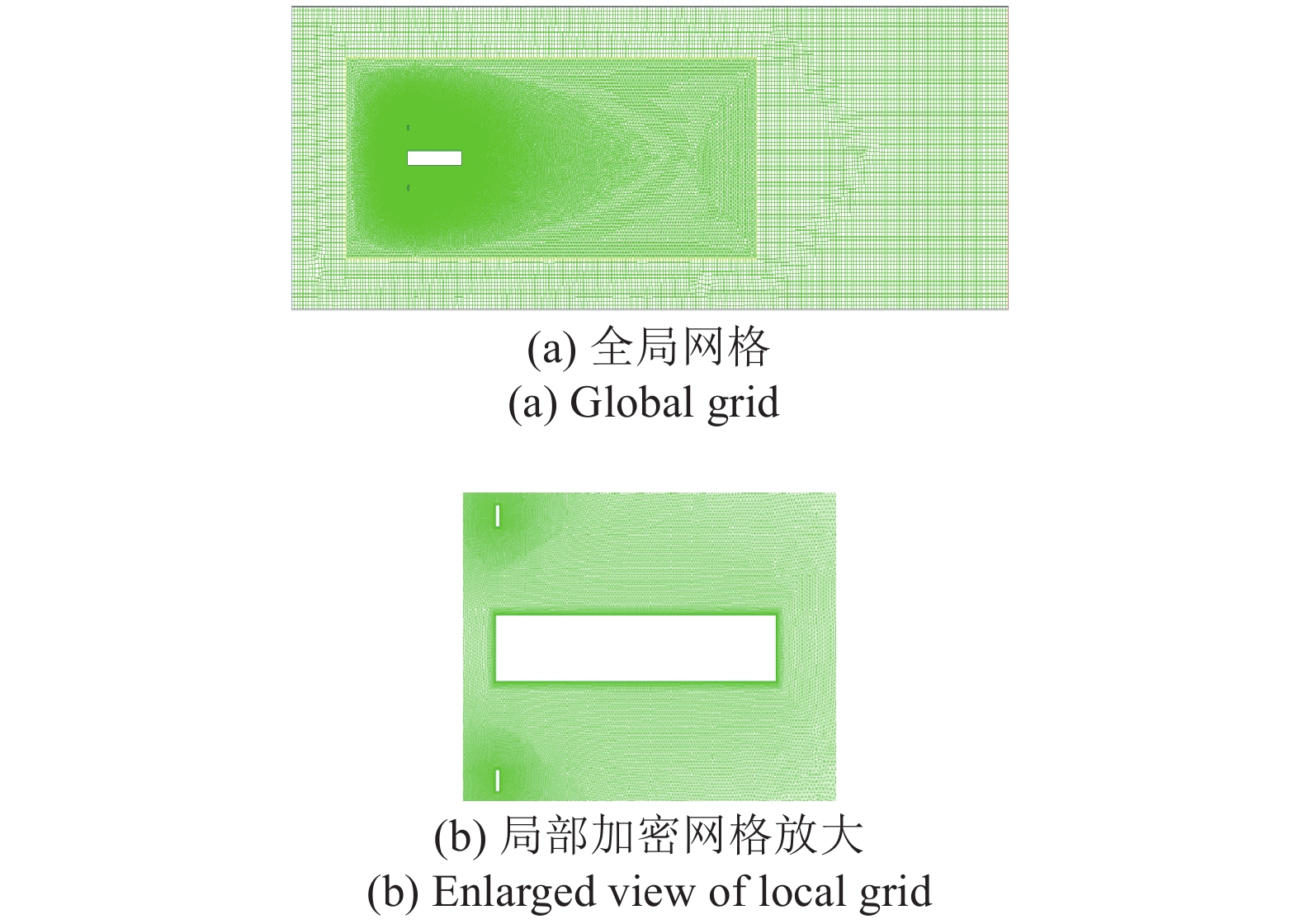
振荡板尾流旋涡的演化过程及升力、阻力和扭转力矩的变化, 采用标准k-ε模型用Fluent软件进行数值模拟. 用Gambit软件进行用网格划分, 整体网格如图2(a)所示, 计算区域的上、下边界到板振荡中心的距离为2B, 入口和出口边界与板旋转轴线的距离分别为3B和10B. 振荡板周围设置非结构网格加密区, 用于动网格计算; 该区上下边界到轴心距离为1.2B, 上、下游边界与轴心距离分别为 B 和 6B. 通过UDF函数定义板的强迫旋转振荡运动.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
计算区域网格划分
Figure
2.
Grid generation of computational domain
下载: 全尺寸图片
幻灯片
网格质量在很大程度上影响着Fluent数值模拟结果的可靠性, 本文采用的是非结构化网格, 选择了6种密度的网格, 对雷诺数Re = 2800的均匀流绕静止矩形板的流动进行网格无关性验证.
表2展示了板在平衡位置静止时, 不同网格所算出的时均阻力系数CD和Strouhal数St值. 随着网格数的增加, St和CD变化越来越缓慢, 逐渐稳定. 本文选用mesh 5进行振荡板绕流模拟.
表
2
网格密度对Re = 2800静止矩形板绕流数值计算结果的影响
Table
2.
Influence of grid density on numerical results of Re = 2800 static rectangular plat
table_type1 ">
| Case | Grid number | CD | St |
| mesh1 | 49668 | 1.10108 | 0.0957 |
| mesh2 | 68606 | 1.08492 | 0.0873 |
| mesh3 | 86536 | 1.07258 | 0.0842 |
| mesh4 | 104864 | 1.06737 | 0.0831 |
| mesh5 | 127671 | 1.06623 | 0.0825 |
| mesh6 | 163243 | 1.06623 | 0.0824 |
下载: 导出CSV
|显示表格
2.
控制结果与分析
本文研究的雷诺数Re = V∞H/v = 2800, 板的振幅β = 0 ~ 10°, 振频feH/V∞ = 0 ~ 0.0857. 其中V∞ = 1.4 m/s为来流速度, H = 0.03 m为板的厚度, ν为空气运动黏度.
2.1
数值模拟涡量场与流动显示结果的比较
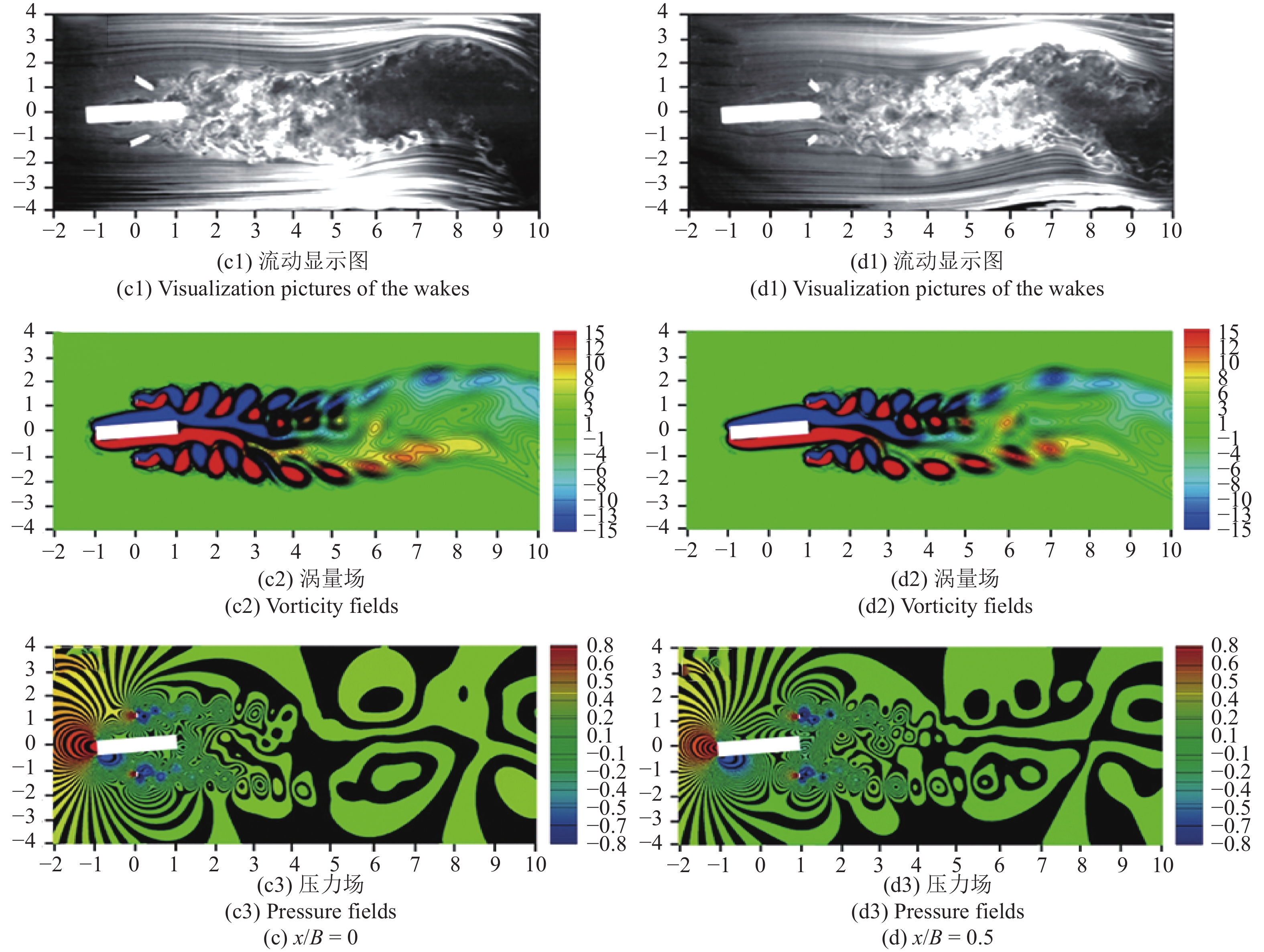
通过烟线显示和值数模拟的涡量场及压力场3种方法显示振荡板的尾流状态. 图3和图4为不同振频振幅下, 未加控制和施加控制件于板前缘、中央和尾缘等不同位置时, 实验与数值模拟结果的对比情况. 受实验场地限制, 相机镜头距离风洞较近, 为了拍摄尽可能大的尾流区域, 镜头焦点在板下游一定位置. 由于板与镜头有夹角, 图片靠近左、右边缘处有一定变形. 但总体上看, 涡量场模拟结果与烟线实验结果相似度很高.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-3-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-3-1.jpg'" class="figure_img
figure_type2 ccc " id="Figure3-1" />
3
振幅β = 5°, 振频feH/V∞ = 0.043时, 控制件横向位置固定于y/H = ± 1.3, 流向位置x/B变化时的流动对比图
3.
Comparisons between the plate wakes without elements and with the elements at y/H = ± 1.3 and different x/B positions. Plate oscillation amplitude β = 5°, frequency feH/V∞ = 0.0428
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-3.jpg'" class="figure_img
figure_type2 ccc " id="Figure3" />
图
3
振幅β = 5°, 振频feH/V∞ = 0.043时, 控制件横向位置固定于y/H = ± 1.3, 流向位置x/B变化时的流动对比图(续)
Figure
3.
Comparisons between the plate wakes without elements and with the elements at y/H = ± 1.3 and different x/B positions. Plate oscillation amplitude β = 5°, frequency feH/V∞ = 0.0428 (continued)
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-4-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-4-1.jpg'" class="figure_img
figure_type2 ccc " id="Figure4-1" />
4
振幅β = 10°和振频feH/V∞ = 0.054时, 控制件横向位置固定于y/H = ± 1.3, 流向位置x/B变化时的流动对比图
4.
Comparisons between the plate wakes without elements and with the elements at y/H = ± 1.3 and different x/B positions. Plate oscillation amplitude β = 5°, frequency feH/V∞ = 0.0428
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-4.jpg'" class="figure_img
figure_type2 ccc " id="Figure4" />
图
4
振幅β = 10°和振频feH/V∞ = 0.054时, 控制件横向位置固定于y/H = ± 1.3, 流向位置x/B变化时的流动对比图(续)
Figure
4.
Comparisons between the plate wakes without elements and with the elements at y/H = ± 1.3 and different x/B positions. Plate oscillation amplitude β = 5°, frequency feH/V∞ = 0.0428 (continued)
下载: 全尺寸图片
幻灯片
图3是振幅5°, 无量纲振频0.043时控制件在不同流向位置的流动对比图. 在烟线图中, 振荡板未加控制时(图3(a1)), 尾流中存在明显的大尺度的旋涡脱落, 脱落模式为2S, 即一个振荡周期内有两个单涡从板两侧脱落下来. 施加窄条控制件后, 如图3(b1)、图3(c1)和图3(d1), 尾流结构发生较大变化, 小尺度旋涡从每个窄条两侧脱落并流向下游. 板尾流中不再出现大尺度旋涡脱落. 从模拟的涡量场看, 旋涡结构变化更加明显. 如图3(b2)、图3(c2)和图3(d2)所示, 从窄条上刚脱落的小尺度旋涡清晰可见, 但在向下游移动过程中, 这些小尺度涡衰弱、变模糊. 窄条对压力场也有较大影响. 无控制时, 如图3(a3), 板逆时针旋转到最大角度, 板下侧靠近前缘处有较大的高负压区, 下游大尺度旋涡结构中心的低压区和旋涡外的区域差别明显. 施加窄条后, 如图3(b3)、图3(c3)和图3(d3)所示, 板下侧的负压区有所减小, 下游也不再有明显的低压结构.
图4是振幅增大到10°, 无量纲振频为0.054的情况. 无控制时, 数值模拟的涡量场与流动显示高度吻合, 如图4(a1)和图4(a2)所示, 板后有2P模式的旋涡脱落, 即一个振荡周期内, 板上下两侧各有一对转向相反的涡脱落下来. 与2S模式单涡相比, 2P模式的对涡尺度更大. 施加控制件后, 如图4(b1)、图4(b2), 图4(c1)、图4(c2), 图4(d1)和图4(d2)所示, 小涡从每个控制件两侧脱落并流向下游, 板的近尾流没有大涡. 再向下游, 小尺度涡已衰弱、变模糊, 但是, 其有合并重组, 形成新的大尺度涡的趋势.
从压力场看, 无控制情况如图4(a3)所示, 板顺时针转动到最大角度, 板上侧前缘附近和下侧尾缘附近都出现较大的负压区, 形成顺时针扭矩, 对抗板向平衡位置恢复. 在板近尾流中, 存在明显的大尺度高压和低压结构. 低压结构由大尺度旋涡形成. 高压结构是由于大尺度对涡结构移动较慢, 外流受其阻挡产生. 施加控制件后, 如图4(b3)、图4(c3)和图4(d3)所示, 板下侧尾缘的负压区近于消失; 尾流中的低压和高压结构或者强度变弱, 或者尺度变小.
2.2
模拟与测量的脉动速度功率谱比较
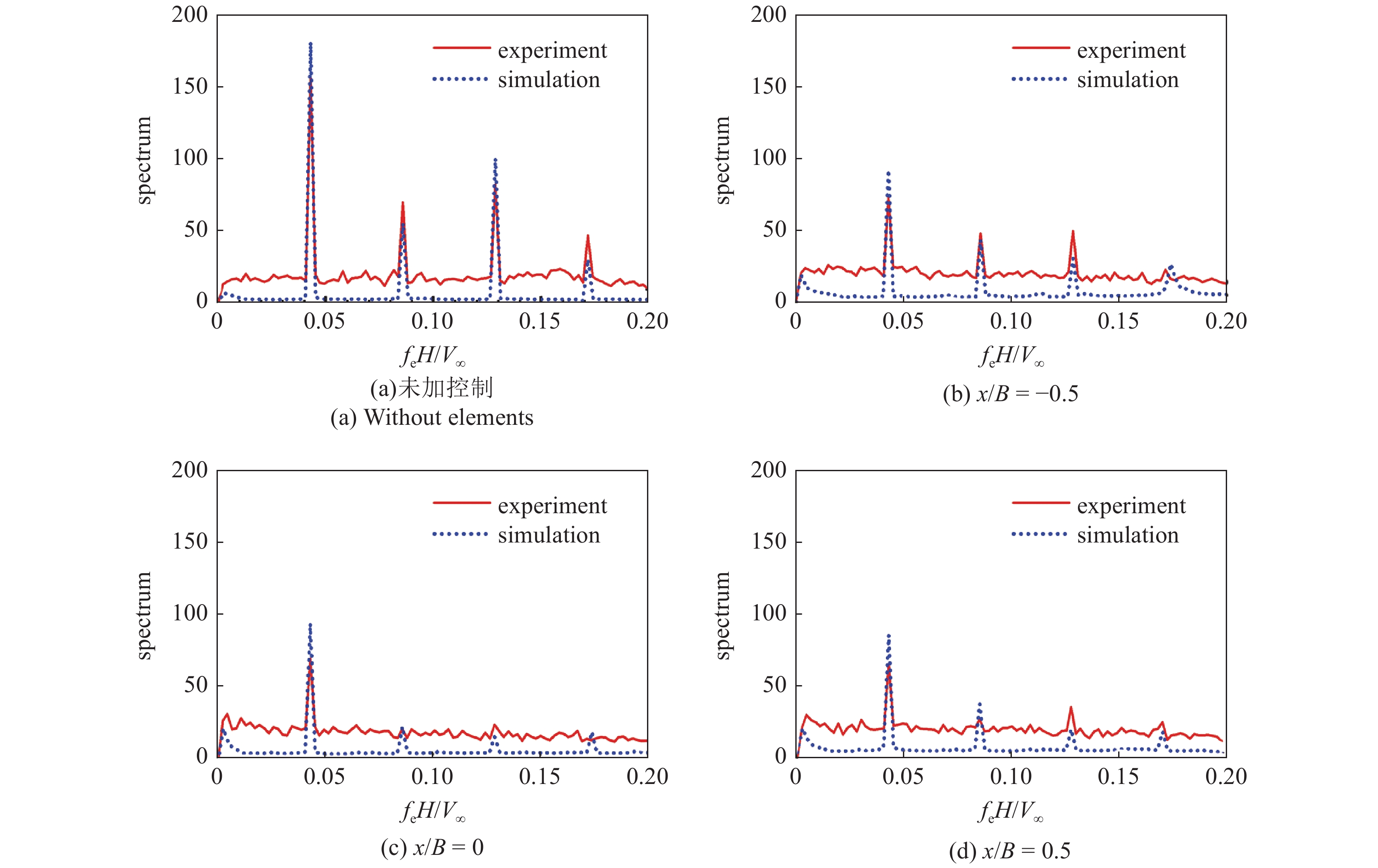
为了定量比较控制前后旋涡脱落强度变化, 将分布于x/H = 12.5横线上的每个监测点得到的脉动速度进行频谱分析, 再对35个监测点的功率谱进行平均, 得到平均功率谱. 平均功率谱上的主峰峰值, 代表旋涡脱落强度. 需要说明的是, 风洞来流中存在湍流度, 其湍流脉动的能量广泛分布于各个频率上, 形成背景宽谱, 叠加在热线测量的功率谱上. 而数值模拟中来流没有湍流度, 不存在背景宽谱, 因此两者功率谱有一定差别.
图5为振幅β = 2.5°, 振频fe H/V∞ = 0.043时, 未加控制和施加控制后, 数值模拟和热线测量的脉动速度功率谱比较. 不加控制时的功率谱如图5(a)所示, 模拟和测量的功率谱上都存在一个主峰和若干个次峰, 其中主峰频率与板振频相同, 次峰频率依次为板振频的2, 3, 4等整数倍. 主峰是由于板的振动形成锁频旋涡脱落, 在尾流脉动功率谱上的反映. 由于流动的非线性性质, 板的振荡在尾流中产生高次谐波, 分别形成2次、3次、4次等谐波脉动, 在功率谱上出现各个次峰. 数值模拟的主峰和3阶谐波峰值略高于测量值, 而2阶和4阶谐波峰值略低于测量值. 由于数值模拟是理想系统, 能量高度集中在主频和各阶谐波频率上, 而风洞存在来流湍流度及壁面摩擦等因素, 形成额外的系统耗散, 可能引起能量在主频、谐波频率和其他频率上的再分配.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-5.jpg'" class="figure_img
figure_type2 ccc " id="Figure5" />
图
5
振幅β = 2.5° 和振频fe H/V∞ = 0.043时, 无控制件与控制件位于横线y/H = ±1.3上不同x/B位置时的尾流脉动速度功率谱比较
Figure
5.
Comparisons between power spectra of fluctuating velocities in the wakes without and with the control elements at y/H = ±1.3 and different x/B positions, the plate oscillation amplitude β = 2.5° and frequency fe H/V∞= 0.043
下载: 全尺寸图片
幻灯片
在横线y/D =

如图6(a)所示, 随着振幅增大到5°时, 未加控制尾流的功率谱主峰值大幅增大. 各次谐波峰值也都有所增大, 但没有主峰增幅大. 施加控制件后如图6(b), 主峰值大幅减小, 各次谐波峰值也都减小. 实验测量的各个峰值均低于数值模拟值. 控制效果方面, 即控制与未控制时功率谱主峰比, 实验值为0.45, 数值模拟为0.48, 也相差不多. 振幅增大到10°时, 未控制尾流脉动速度功率谱主峰值相比5° 时并未增大, 如图7(a)所示. 而测量结果证明, 随着振频增大, 主峰值是迅速减小趋势(未给出图), 这可能是因为测量点离板有一定距离, 高频振荡信号衰减比低频快的缘故. 施加控制后, 功率谱主峰和各谐波峰值都有减小. 控制与无控制主峰比, 数值模拟和实验测量均为0.78.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
振幅β = 5° 和振频fe H/V∞ = 0.043时, 无控制件与控制件位于横线y/H = ±1.3上、x/B = 0位置时的尾流脉动速度功率谱比较
Figure
6.
Comparisons between power spectra of fluctuating velocities in the wakes without and with the control elements at y/H = ±1.3 and x/B = 0 , the plate oscillation amplitude β = 5° and frequency fe H/V∞ = 0.043
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
振幅β = 10° 和振频fe H/V∞ = 0.054时, 无控制件与控制件位于横线y/H = ±1.3上、x/B = 0位置时的尾流脉动速度功率谱比较
Figure
7.
Comparisons between power spectra of fluctuating velocities in the wakes without and with the control elements at y/H = ±1.3 and x/B = 0 , the plate oscillation amplitude β = 10° and frequency fe H/V∞ = 0.054
下载: 全尺寸图片
幻灯片
2.3
旋涡脱落抑制效果
设加控制件后实验测量的尾流脉动速度平均功率谱的主峰值为P, 未加控制时测量的功率谱主峰值为P0, 则比值P/P0代表尾流旋涡脱落的实际抑制效果: 当P/P0 < 1.0时, 施加控制件能够减小锁频旋涡脱落的规则脉动能量, 效果是正面的; 而当P/P0 > 1.0时, 施加控制件会增大锁频旋涡脱落的规则脉动能量, 效果是负面的.
在图8中, 两控制件的横向位置固定为y/H =±1.3, 流向位置在x/B = ?0.5, 0, 0.5时的控制效果分别如图8(a) ~ 图8(c)所示.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
控制件横坐标y/H = ±1.3时不同振幅下尾流脉动速度功率谱主峰峰值比P/P0 随振频feH/V∞的变化
Figure
8.
Main peak ratio of power spectra of fluctuating velocities P/P0 versus non-dimensional oscillation frequency feH/V∞ for different oscillation amplitudes, with the elements at y/H = ±1.3
下载: 全尺寸图片
幻灯片
当控制件位于板前缘x/B = ?0.5时, 振幅β = 2.5°和5°时, 在振频范围feH/V∞ = 0.005 ~ 0.08内, 控制件方法具有较好的控制效果. 当振幅增大到β = 7.5°时, 控制效果减弱, 但在上述振频范围内比值P/P0仍然低于1.0. 当振幅增大到β = 10°时, 在feH/V∞ = 0.035 ~ 0.065范围内, 控制件具有负面效果.
当控制件位于板中央x/B = 0时, 也有相似结果, 振幅β = 2.5°和5°时控制效果很好, β = 7.5°也有正面控制效果, 但β = 10°时, 在大多数振频下都出现负面控制效果. 当控制件位于板尾缘x/B = 0.5时, β = 2.5°, 5°, 7.5° 和10°情况下, 具有正面控制效果的振频范围分别为feH/V∞ = 0.0075 ~ 0.08, 0.01 ~ 0.075, 0.02 ~ 0.085和0.03 ~ 0.075.
根据Shao等[42]的研究结果, 窄条控制效果与窄条迎风宽度b与板迎风面宽度H*之比b/H* 有正相关性. 当板与来流具有角度β时, 其迎风宽度变为
$$H^* = Hcos beta + Bsin beta approx Hleft(1 + beta frac{B}{H} ight) = H(1 + 5beta )$$  |
由该式计算的b/H* 随板攻角的变化如表3所示. 可以看出, 随着板攻角增大, b/H*快速减小, 因此控制效果也快速减弱. 板旋转振荡, 其攻角可达振幅值, 因此控制效果也随振幅增大而变差. 当β = 10°时, b/H*减小到接近失效的临界值. 好在一般颤振振幅都是从小逐渐变大; 如果小振幅时具有好的控制效果, 则颤振振幅不会增大到不可控的程度.
表
3
窄条迎风宽度比 b/H* 随攻角β的变化
Table
3.
Variation of windward width ratio b/H* with angle of attack β
table_type1 ">
| β | 0° | 2.5° | 5° | 7.5° | 10° |
| H*/H | 1.0 | 1.218 | 1.436 | 1.655 | 1.876 |
| b/H* | 0.32 | 0.263 | 0.223 | 0.193 | 0.171 |
下载: 导出CSV
|显示表格
2.4
数值模拟与实验测量的尾流速度剖面对比
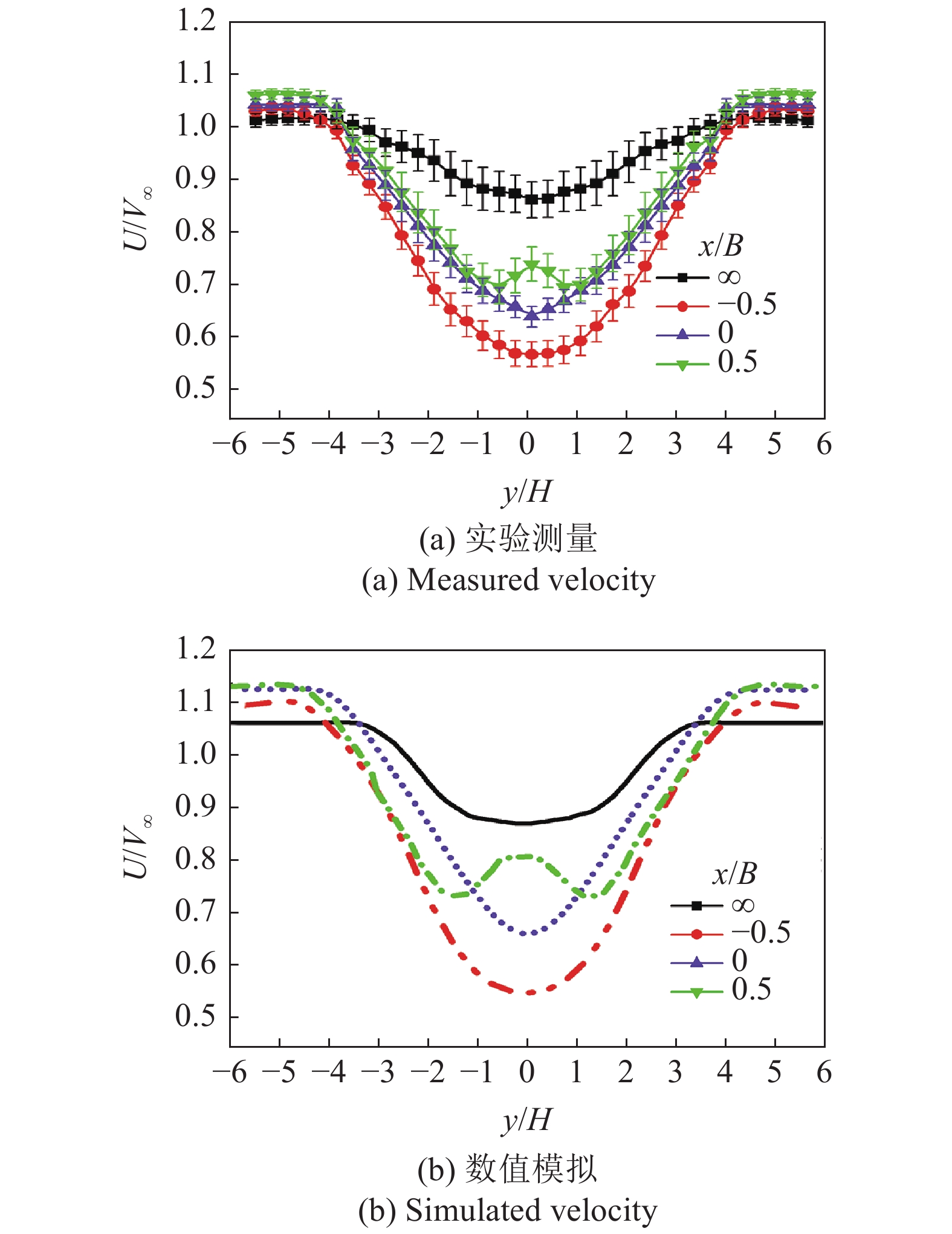
振幅β = 2.5°下, 在下游x/H = 12.5测量的尾流速度剖面如图9(a)所示. 无控制(控制件位置x/B = ∞)时, 尾流速度亏损相对较小, 尾流相对较窄, 流速在y/H =±3恢复到外流大小. 施加控制件于板前缘x/B = ?0.5时, 速度亏损加大, 尾流变宽为y/H = ?4 ~ 4. 控制件位于板中央x/B = 0和板尾缘x/B = 0.5时, 尾流宽度为y/H = ?3.5 ~ 3.5, 速度亏损低于控制件在前缘时, 但仍高于无控制情况. 控制件在板尾缘x/B = 0.5时, 测量的速度剖面为W型, 其他控制件位置时速度剖面为V型. 如图9(b)所示, 数值模拟的速度剖面, 在各控制件位置下都与实测剖面具有相同的形状. 无控制时, 模拟的最大亏损与实测几乎相同, 但模拟的尾流宽度比实测窄. 控制件位于前缘时, 模拟的最大速度亏损值略大于实测, 但尾流宽度两者几乎相同. 控制件位于板中央时, 模拟与实测速度剖面最为接近. 控制件位于板尾缘时, 模拟的W型速度剖面, 其两个谷略低于实测值, 而尾流中心的峰值略高于实测值, 尾流宽度则与实测结果几乎相同.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
振幅β = 2.5°, 振频fe H/V∞ = 0.043下, 控制件在横线y/H = ±1.3上不同x/B位置时, 位于板下游x/H = 12.5处的尾流速度剖面比较
Figure
9.
Comparisons between measured and simulated velocity profiles sampled at x/H = 12.5 in the wakes with elements at y/H = ±1.3 and different x/B positions, the oscillation amplitude β = 2.5° and frequency fe H/V∞ = 0.043
下载: 全尺寸图片
幻灯片
图10 为振幅增大到β = 7.5°的速度剖面情况. 如图10(a)所示, 无控制时实测速度亏损较轻, 施加控制后速度亏损加大, 尤其当控制件位于板前缘时亏损最严重. 控制件在板尾缘时, 速度剖面为W型, 其他控制件位置下(包括无控制), 速度剖面为V型. 如图10(b)所示, 数值模拟的各控制件位置下的速度剖面,在形状和具体数值大小方面, 都与实测结果很接近.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
振幅β = 7.5°, 振频feH/V∞ = 0.054下, 控制件在横线y/H = ±1.3上不同x/B位置时, 位于板下游x/H = 12.5处的尾流速度剖面比较
Figure
10.
Comparisons between measured and simulated velocity profiles sampled at x/H = 12.5 in the wakes with elements at y/H = ±1.3 and different x/B positions, the oscillation amplitude β = 7.5° and frequency fe H/V∞ = 0.054
下载: 全尺寸图片
幻灯片
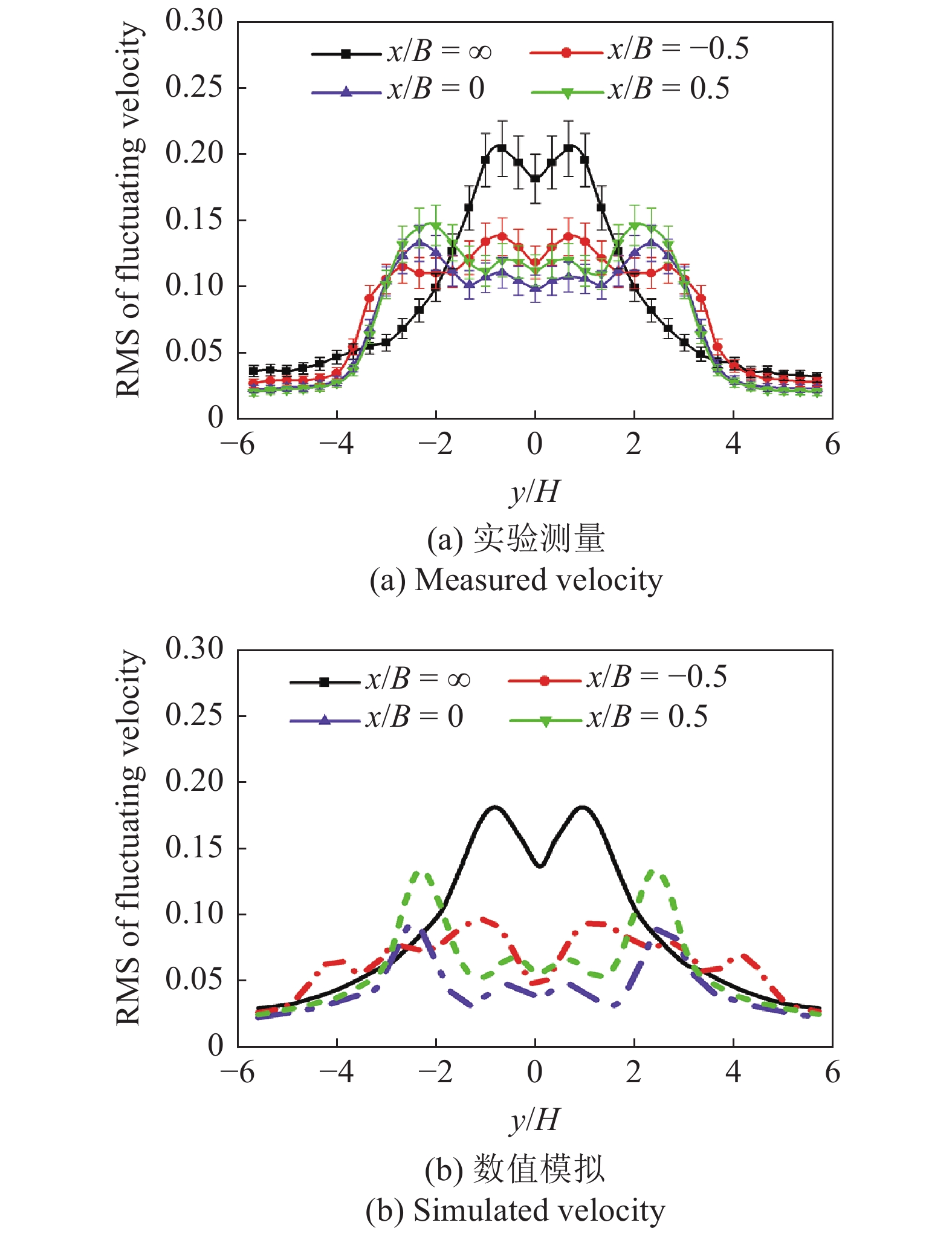
图11(a)为振幅β = 2.5°时, 在下游x/H = 12.5位置测量的尾流脉动速度均方根(RMS)沿y轴的分布情况. 无控制时, 尾流核心区脉动速度较大, 分布呈M状, 在y/H = ±1.0附近达到最高值, 随着离尾流中心线的距离变大, 脉动速度迅速减小. 加控制件于不同位置时, 尾流核心区脉动速度减小. 模拟的脉动速度均方根值分布如图11(b)所示. 无控制时脉动速度分布也呈M状, 在y/H = ±1.0附近达到最高值, 但比实测最高值低. 施加控制件于前缘、中央、尾缘后, 数值模拟的脉动速度均方根分布形状均与实测情况相似, 但具体数值均比实测值低.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-11.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-11.jpg'" class="figure_img
figure_type1 bbb " id="Figure11" />
图
11
振幅β = 2.5°, 振频fe H/V∞ = 0.043下, 控制件在横线y/H = ±1.3上不同x/B位置时, 位于板下游x/H = 12.5处的尾流脉动速度均方根值比较
Figure
11.
Comparisons between measured and simulated r.m.s values of fluctuating velocities sampled at x/H = 12.5 in the wakes with elements at y/H = ±1.3 and different x/B positions, the oscillation amplitude β = 2.5° and frequency fe H/V∞ = 0.043
下载: 全尺寸图片
幻灯片
图12(a)为振幅β = 7.5°下, 在下游x/H = 12.5位置测量的尾流脉动速度均方根沿y轴的分布情况. 无控制件与控制件位于不同位置时, 均方根值分布都呈M状, 均方根值有控制时比无控制时低. 如图12(b)所示, 数值模拟的脉动速度均方根分布形状与实测情况一致, 但在尾流核心区模拟的均方根数值低于实测值. 实测尾流脉动速度高于模拟值, 可能是风洞来流湍流度带来的影响, 具体情况有待进一步研究.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-12.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-12.jpg'" class="figure_img
figure_type1 bbb " id="Figure12" />
图
12
振幅β = 7.5°, 振频fe H/V∞ = 0.054下, 控制件在横线y/H = ±1.3上不同x/B位置时, 位于板下游x/H = 12.5处的尾流脉动速度均方根值比较
Figure
12.
Comparisons between measured and simulated r.m.s values of fluctuating velocities sampled at x/H = 12.5 in the wakes with elements at y/H = ±1.3 and different x/B positions, the oscillation amplitude β = 7.5° and frequency fe H/V∞ = 0.054
下载: 全尺寸图片
幻灯片
2.5
升阻力与力矩控制效果
由于缺乏实验条件, 振荡板的升阻力和扭转力矩无法实测得到. 鉴于数值模拟与实验测量在尾流旋涡流场、时均速度剖面、脉动速度功率谱和脉动速度均方根分布方面的吻合度良好, 因此采用数值模拟方法将控制件纵坐标固定在板中央x/B = 0处, 改变控制件与板中心轴的距离y/H, 研究其对振荡板升力、阻力及扭矩的控制效果.
图13(a)为振幅β = 2.5°时, 控制前后升力、阻力系数随时间的变化. 其中, C0, C10可以看出, 控制前和控制后板的阻力系数脉动都很小, 控制后平均阻力略有上升. 控制前升力系数随板的振荡作周期性变动, 控制前变动幅值较大, 控制后变动幅值减小约一半.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-13.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-13.jpg'" class="figure_img
figure_type1 bbb " id="Figure13" />
图
13
振幅β = 2.5°, 振频feH/V∞ = 0.054时, 无控制件与控制件位于x/B = 0, y/H = 1.0时板的升、阻力系数和力矩系数随时间的变化
Figure
13.
Time series of force and torque coefficients of the plate in cases without elements and with the elements at x/B = 0, y/H = 0.5,and β = 2.5°, feH/V∞ = 0.0536
下载: 全尺寸图片
幻灯片
图13(b)为控制前、后板的扭转力矩随时间的变化. 控制前力矩系数作周期性变化, 其中, Cm和Cm0变化幅值约为1.8, 控制后变化幅值减为约1.0.
图14为振幅β = 5°时, 窄条对板升力、阻力和力矩系数的控制效果. 控制前、后板的阻力系数变化幅度都较小, 控制后平均阻力略有上升. 控制前板的升力系数和力矩系数变化幅度分别为2.0和3.8, 控制后分别减小为0.9和2.3.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-14.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-14.jpg'" class="figure_img
figure_type1 bbb " id="Figure14" />
图
14
振幅β = 5°, 振频feH/V∞ = 0.054下, 无控制件与控制件位于x/B = 0, y/H = ±1.0时板的升力、阻力系数和扭转力矩系数随时间的变化
Figure
14.
Time series of force and torque coefficients of the plate in cases without elements and with the elements at x/B = 0, y/H = ±1.0,and β = 5°, feH/V∞ = 0.054
下载: 全尺寸图片
幻灯片
板的扭矩和升力系数脉动幅度的减小, 将直接减小颤振导数值, 因此提高颤振临界风速, 对颤振抑制具有重要意义.
将升力系数和力矩系数减去各自的时均值后, 得到脉动升力系数和脉动力矩系数. 对脉动升力和脉动力矩的时间序列分别求均方根, 得到施加与未加控制时脉动升力系数均方根比值Cl /Cl0, 和脉动扭矩系数均方根比值Cm/Cm0. 当两个比值均小于1时, 施加窄条对颤振具有正面抑制效果.
图15(a)是不同振幅下, 有控制与无控制时的脉动扭矩均方根比值Cm/Cm0随板中央控制件横向位置y/H的变化情况, 其中振频固定为feH/V∞ = 0.054. 工程中常用的中央控制板方法, 是将控制板与桥面接触或很靠近桥面安装. 但本文结果显示, 控制件很靠近板面时, 脉动力矩控制效果不佳. 随着控制件离板面距离增加, 脉动升力迅速下降, 到y/H = 1.0时, 降至最低值. 再增大y/H, 效果又迅速变差. Cm/Cm0最低值随振幅的增大而增大, 由β = 2.5°时的0.6 上升到β = 7.5°时的0.7.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-15.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-15.jpg'" class="figure_img
figure_type1 bbb " id="Figure15" />
图
15
固定振频feH/V∞ = 0.054, 不同振幅β下, 有控制和无控制时脉动力距系数均方根比Cm/Cm0和脉动升力系数均方根比Cl/Cl0 随中央控制件(x/B = 0)横向位置y/H的变化图
Figure
15.
Cm/Cm0 and Cl/Cl0 versus y/H at fixed frequency fe H/V∞=0.054, where y/H is distance between the plate axis and the element on central line x/B = 0; Cm/Cm0 (Cl/Cl) is root mean square ratio of fluctuating moment (fluctuating lift) with and without control
下载: 全尺寸图片
幻灯片
如图15(b)所示, 脉动升力均方根比Cl/Cl0随控制件位置y/H的变化情况与脉动扭矩系数类似. 窄条很靠近板面时, 控制效果较差. 随着距离y/H增大, 控制效果改善. 窄条位置在y/H = 0.8附近时, 控制效果最佳; 再增大间距, 控制效果又变差. β = 2.5°, 5°, 7.5°时, Cl/Cl0最低值分别达到0.1, 0.3和0.5.
图16(a)为振幅β = 5°时, 脉动扭矩比Cm/Cm0随中央控制件横向位置的变化. 各振频下, 控制件最佳位置在y/H = 0.85 ~ 1.0之间. Cm/Cm0最低值随振频增大而上升, 由feH/V∞ = 0.043时的0.57上升到feH/V∞ = 0.054, 0.064时的0.63和0.84.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-16.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-16.jpg'" class="figure_img
figure_type1 bbb " id="Figure16" />
图
16
振幅 β = 5°时, 有控制与无控制的脉动扭矩系数和脉动升力系数均方根比值Cm/Cm0和Cl/Cl0随中央控制件(x/B = 0)横向位置y/H的变化图
Figure
16.
Cm/Cm0 and Cl/Cl0 versus y/H at fixed oscillation amplitude β = 5°, where y/H is distance between the plate axis and the element on central line x/B = 0; Cl0, Cm0 and Cl, Cm are rms of fluctuating lift, rms of fluctuating torque of the plate without and with elements respectively
下载: 全尺寸图片
幻灯片
图16(b)为脉动升力比Cl /Cl0随控制件距离y/H的变化. 当振频较低, feH/V∞ = 0.043时, 控制件靠近板面时控制效果最好, 随着距离增大而变差. 当振频稍增大到feH/V∞ = 0.054, 0.064时, 最佳控制效果的位置在y/H = 0.85 ~ 1.0. 3个频率下, Cl /Cl0最低值在0.2 ~ 0.25之间, 控制效果都很好.
由图15和图16可知, 具有较好控制效果的控制件y/H位置区域较狭窄. 对于颤振来说, 扭矩控制占首要地位, 其次是升力. 实际应用中, 需根据桥跨结构固有频率等因素, 选择合适的控制件位置.
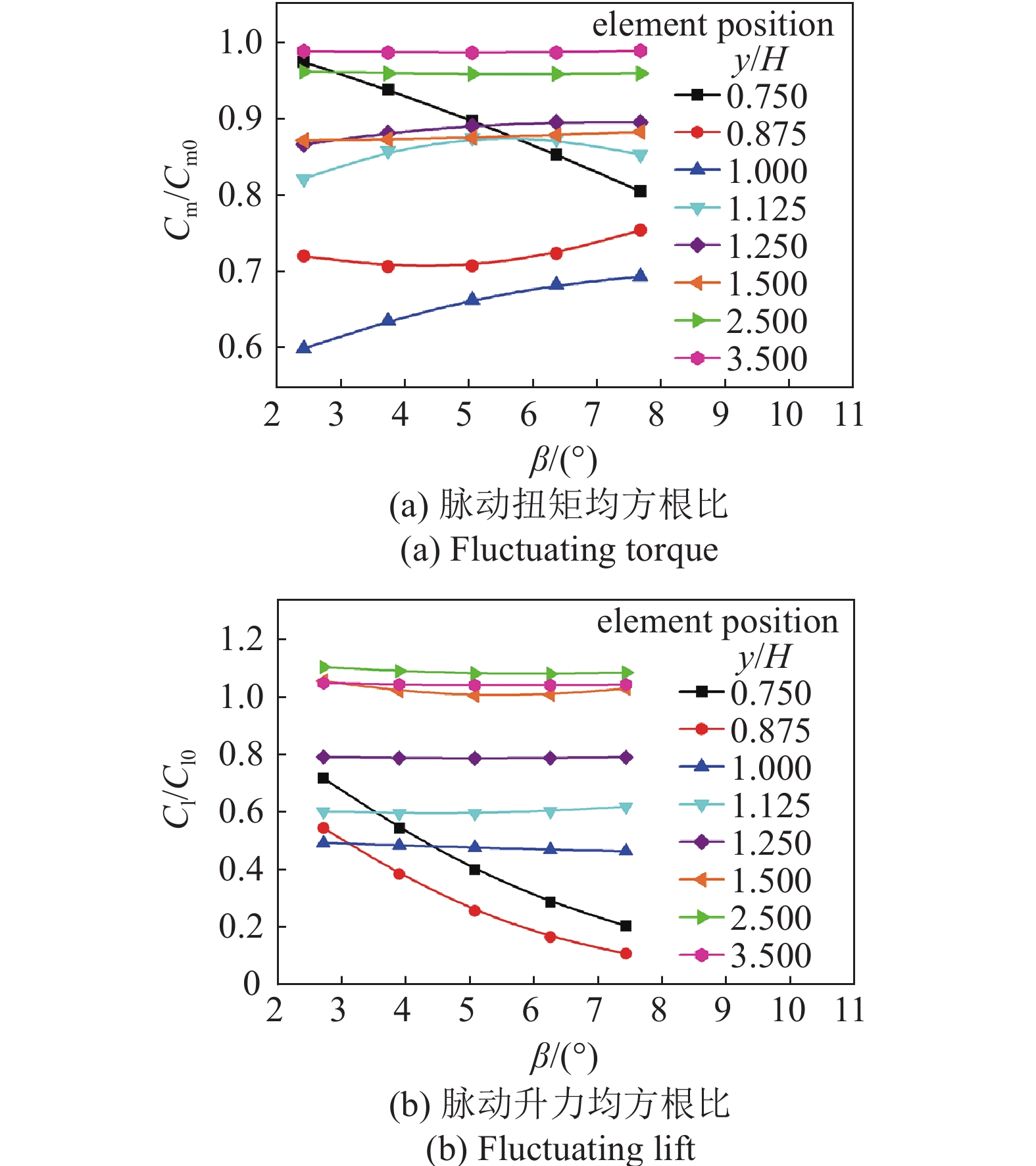
图17(a)为固定振频下, 扭矩控制效果随振幅的变化. 当控制件很靠近板面y/H = 0.75时, 在该频率下, 小振幅时控制效果不佳, 但随振幅增大, 控制效果加强. 当位置在y/H = 0.875 ~ 1.0时, 扭矩抑制效果最好, 且随振幅改变, 抑制效果变化不大. 当y/H > 1.13时, 抑制效果不佳.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-17.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-17.jpg'" class="figure_img
figure_type1 bbb " id="Figure17" />
图
17
振幅β对板脉动扭矩比Cm/Cm0和脉动升力比Cl/Cl0控制效果的影响(振频feH/V∞ = 0.054. 中央控制件(x/B = 0)在不同 y/H位置)
Figure
17.
Influences of oscillation amplitude β on suppression of fluctuating torque and lift of the plate. (Oscillation frequency feH/V∞ = 0.0536, and the central elements (x/B = 0) at different y/H positions)
下载: 全尺寸图片
幻灯片
图17(b)为固定振频下, 升力控制效果随振幅的变化. y/H

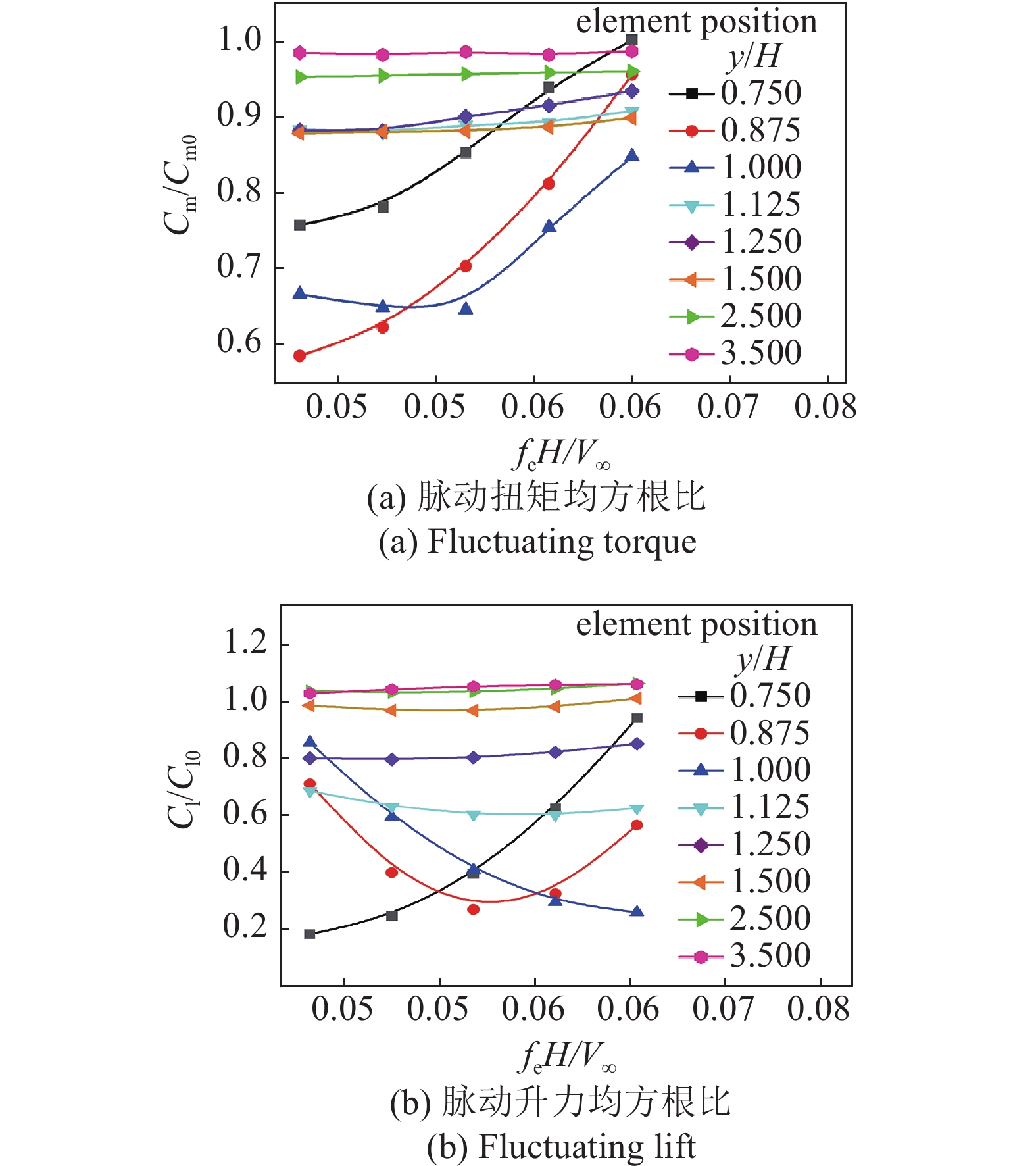
图18(a)为脉动扭矩比随feH/V∞的变化. 当控制件很靠近板面y/H = 0.75时, 脉动扭矩控制效果不是很好, 且随着振频增大, 效果越差. 随着y/H增大到0.875 ~ 1.0, Cm/Cm0曲线整体上下降很多, 抑制效果变好, 但Cm/Cm0随振频增大而增大的趋势仍然存在. 当y/H = 1.125 ~ 1.5时, 仍有一定控制效果, 且不随振频改变. 工程桥梁的固有频率都很低, 加之颤振临界风速很高, 因此无量纲频率很低. 由于颤振气动导数的存在, 降低结构阻尼和结构刚度, 致使桥跨结构固频率变的更低. 因此在低频下具有好的控制效果, 对颤振抑制仍具有重要意义.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-18.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-18.jpg'" class="figure_img
figure_type1 bbb " id="Figure18" />
图
18
振频feH/V∞对板脉动扭矩比Cm/Cm0和脉动升力比Cl/Cl0控制效果的影响(振幅β = 5°, 中央控制件(x/B = 0)位于不同 y/H位置)
Figure
18.
Influences of oscillation frequency feH/V∞ on suppression of fluctuating torque and lift of the plate (Oscillation amplitude β = 5°, and the central elements (x/B = 0) at different y/H positions)
下载: 全尺寸图片
幻灯片
图18(b)为脉动升力控制效果随振频的变化情况. 控制件很靠近板面y/H = 0.75时, 在低振频下控制效果很好, 但随着振频增大, 效果越来越差. 控制件在y/H = 0.875 ~ 1.125之间时, 总体控制效果较好, 特别是y/H = 1.0时, 随振频增大, 效果变得越来越好.
3.
尾流控制机理讨论
尾流控制机理与旋涡生成机理密不可分. 静止柱体尾流涡脱落的形成机制已经有多位作者进行了研究: 文献[43-44]在尾流速度剖面的线性稳定性分析中, 引入绝对不稳定性和对流不稳定性概念, 认为近尾流中的绝对不稳定性是旋涡脱落形成的主要因素; 文献[45-46]的研究证明, 只有当近尾流中的绝对不稳定性区足够大时才能形成尾流的整体不稳定和旋涡脱落;文献[47-49]在柱体尾部引入喷射和抽吸, 减小了绝对不稳定性区并抑制了旋涡脱落.
在振荡板尾流中, 除了绝对不稳定性机制以外, 还存在另一种旋涡生成机制, 称为信号放大机制[50]: 振荡运动在尾流中发出周期性扰动信号, 该信号在向下游传播过程中发展放大, 形成旋涡脱落. 在振荡板尾流中, 这两种机制存在竞争: 绝对不稳定性机制占优时形成非锁频旋涡脱落, 其频率与柱体振荡频率无关. 信号放大机制占优时形成锁频旋涡脱落, 其频率与板振荡频率相同.
根据有关研究, 静止圆柱体尾流初次失稳(从二维向三维转变)的临界雷诺数约为190, 三次失稳临界雷诺数约为260, 转捩为湍流的临界雷诺数低于400[51-52]). 周期振荡柱体尾流第三次失稳的临界雷诺数为377[53]. 而三次失稳后, 雷诺数再增大一个不是很大的定值, 尾流将转捩为湍流[54]. 在本文研究的雷诺数Re = 2800下, 旋转振荡板的尾流为湍流. 湍尾流的不规则脉动将使大尺度旋涡的能量向小涡迁移, 并可能影响旋涡脱落的形成. 施加控制件以后, 将在两个方面影响板尾流: 一是改变板尾流的速度剖面, 二是增强板尾流不规则脉动, 因此在尾流稳定性分析中, 这两个因素都需要考虑, 才能正确反映施加控制件后尾流稳定性的改变.
为了研究信号放大问题, 将无量纲化的尾流流速的两个分量分解为平均量和脉动量
$$left( begin{array}{l} {V_{x}} {V_{y}} end{array} ight) = left( begin{array}{l} {U_0} {V_0} end{array} ight) + left( begin{array}{l} {u'} {v'} end{array} ight)$$  | (1) |
将脉动速度u′, v′ 进一步分解为具有最大增长率的规则脉动项、其他规则脉动项和不规则脉动项3部分. 设规则扰动幅值变化率相对于其波动周期变化来说很慢, 可按照多重尺度方法, 引入时间慢变量:
m{ = }};varepsilon t$


$$left( {begin{array}{*{20}{l}}{u'}{v'}end{array}} ight) = sumlimits_{{k} = 1}^{{M}} {left( {begin{array}{*{20}{l}}{{u_{k}}}{{v_{k}}}end{array}} ight)} {{ m{e}}^{ - { m{i}}{omega _{k}}t}}{ m{ + c}}.{ m{c}}. + left( {begin{array}{*{20}{l}}{{{u'}_{{irr}}}}{{{v'}_{{irr}}}}end{array}} ight)$$  | (2) |
式中u1, v1为有最大增长率的规则脉动幅值, uk和vk (k ≥ 2)为其他规则脉动幅值, 他们都是τ 和空间坐标的函数. ω1 = ω为最大增长的脉动圆频率(主频), ωk (k ≥ 2)为其他规则脉动圆频率. 最后一项为不规则脉动. 利用连续性方程, 将动量方程中的压力项消去, 再将得到的单一方程各项分别乘以
m{e}}^{{
m{i}}{omega t}}}}$

$$frac{1}{T}intlimits_0^{{T}} {{{ m{e}}^{{ m{i}}{ m{omega t}}}}left( begin{array}{l} {u'} {v'} end{array} ight)} { m{d}}t = left( begin{array}{l} {u_1} {v_1} end{array} ight)qquadqquadqquad;;;;;$$  | (3) |
$$frac{1}{T}intlimits_0^{{T}} {{{ m{e}}^{{ m{i}}{omega t}}}frac{{ m{d}}}{{{ m{d}}t}}left( begin{array}{l} {u'} {v'} end{array} ight){ m{d}}t} = varepsilon frac{{ m{d}}}{{{ m{d}}tau }}left( begin{array}{l} {u_1} {v_1} end{array} ight) - { m{i}}omega left( begin{array}{l} {u_1} {v_1} end{array} ight)$$  | (4) |
其中T相对于规则脉动周期和不规则脉动来说是足够长的时间,从而使积分收敛;而相对于慢变量来说,εT又足够短,各规则脉动幅值变化可忽略。如果将ω看作复数,则脉动幅值变化可化为ω的虚部,式(3)中的积分结果变为
$$frac{1}{T}intlimits_0^{{T}} {{{ m{e}}^{{ m{i}}omega t}}frac{{ m{d}}}{{{ m{d}}t}}left( begin{array}{l}{u'}{v'}end{array} ight){ m{d}}t} = - { m{i}}omega left( begin{array}{l}{u_1}{v_1}end{array} ight)$$  | (5) |
而不规则项积分后的结果, 相当于湍流能谱(宽谱)在主频率下的值等于0 (如果不为0, 可吸收进最大增长的主频脉动中).
对不规则脉动的影响, 引入涡黏系数(没有其他假设), 则扰动非线性项部分得到线性化
$$left. begin{array}{l}dfrac{1}{T}displaystyleintlimits_0^{{T}} {({{u'}^2} - {{v'}^2})} {{ m{e}}^{{ m{i}}{omega t}}}{ m{d}}t = 4{v_{{{T}}_1}}dfrac{{partial {v_1}}}{{partial y}} = - 4{v_{{{T}}_1}}dfrac{{partial {u_1}}}{{partial x}}dfrac{1}{T}displaystyleintlimits_0^{{T}} { - u'v'} {{ m{e}}^{{ m{i}}{omega t}}}{ m{d}}t = {v_{{{T}}_2}}left(dfrac{{partial {u_1}}}{{partial y}} + dfrac{{partial {v_1}}}{{partial x}} ight)end{array} ight}$$  | (6) |
式中


$$left( begin{array}{l} {u_1} {v_1} end{array} ight) = {{ m{e}}^{{{ m{i}}kx}}}left( begin{array}{l} u v end{array} ight)$$  | (7) |
式中, k为波数, u和v为y坐标的函数. 忽略V0, 忽略U0随流向坐标的变化, 用连续性方程消去u, 最后得到关于v的线性稳定性方程
$$ begin{split}&(k{U_0} - omega )({D^2} - {k^2})v - kv{D^2}{U_0}+ 2{ m{i}}{k^2}D({v_{{ m{T1}}}}Dv) + &{ m{i}}({D^2} + {k^2})[{v_{{ m{T2}}}}({D^2} + {k^2})v]+ ({ m{i}}/{mathop{ Re}nolimits} ){({D^2} - {k^2})^2}v = 0end{split} $$  | (8) |
式中,
m{d}}}{{{
m{d}}y}}$

平行流假设下涡黏系数仅为空间位置 y 的函数, 不随时间改变.
根据有关研究[51,55], 当采用饱和状态(satuated state)流速作为基本流时, 得到的主频率与实验旋涡脱落频率很接近, 而采用初始速度剖面时, 得到的主频率与实验差别较大. 因此稳定性分析中采用饱和速度剖面; 而两个涡黏系数(假设为正实数), 可以用饱和状态下测量的脉动速度, 以及经过滤波后得到的主频脉动u1和v1, 通过式(5)的关系推出. 用重复测量结果计算的涡黏系数都非常接近, 说明其具有唯一性.
图19(a)和图19(d)分别为无控制和施加控制后各流向站位的速度剖面情况: 无控制的速度剖面呈V型, 只有一个低谷; 施加双控制件后, 速度剖面存在3个低谷.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-19.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-19.jpg'" class="figure_img
figure_type2 ccc " id="Figure19" />
图
19
振幅 β = 2.5°, 振频 feH/V∞= 0.043时, 无控制与有控制的尾流速度剖面与涡黏系数分布对比
Figure
19.
Comparisons of velocity profiles and eddy viscosities between the wakes without elements and with the elements at x/B = 0.5, y/H = ± 1.3 when β = 2.5° and feH/V∞ = 0.0428
下载: 全尺寸图片
幻灯片
图19(b)和图19(e)分别为无控制和施加控制后的尾流各流向站位的第一涡黏系数情况: 无控制时, 涡黏系数



图19(c)和图19(f)分别为无控制和施加控制后的第二涡黏系数在各流向站位的分布情况: 无控制和有控制时的分布区域分别与第一涡黏系数无控制和有控制时的区域相同; 施加控制后

将y/H坐标归一化为
ight)$


$$left. {begin{array}{*{20}{l}}{varphi _{2{{n}} !-!1}}(eta ) = qquad{T_{2{{n}} !+!3}}(eta ) !-!left( {2 !+!dfrac{1}{n}} ight){T_{2{{n}} !+!1}}(eta ) !+!left( {1 !+!dfrac{1}{n}} ight){T_{2{{n}} !-!1}}(eta ){varphi _{2{{n}}}}(eta ) = qquad{T_{2{{n}} !+!2}}(eta ) !-!left( {2 !+!dfrac{2}{{2n !-!1}}} ight){T_{2{{n}}}}(eta ) !+!left( {1 !+!dfrac{2}{{2n !-!1}}} ight){T_{2{{n}} !-!2}}(eta )end{array}} ight}$$  | (9) |
作为基本函数系, 将扰动量v展开成2N项级数之和并带入稳定性方程, 将函数系的每个

对每个x/H站位, 对k = 0.025 ~ 50, 每隔0.025取一个波数, 求出虚部最大的特征根ω = ωr + iωi, 然后再取所有波数中的最大虚部ωi max, 作为该x/H站位的最大扰动放大因子. 对每个x/H站位, 最大放大因子所对应的圆频率ωr max, 再除以

图20(a)为最大扰动放大因子ωi max随流向站位x/H的变化. 无控制时, 考虑涡黏性计算的最大放大因子曲线, 略低于不考虑涡黏性(在稳定性方程中令


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-20.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/7//20-423-20.jpg'" class="figure_img
figure_type1 bbb " id="Figure20" />
图
20
振幅β = 2.5°, 振频feH/V∞ = 0.043下, 未加控制和加控制件于x/B = 0.5, y/H = ±1.3时扰动最高放大因子ωi max及扰动增长的最大频率fmax随流向站位x/H的变化曲线对比
Figure
20.
Maximum perturbation amplification factors and maximum frequencies of amplifying perturbations in the wakes without control and with the control elements at x/B = 0.5, y/H = ±1.3 whenβ = 2.5° and feH/V∞ = 0.043
下载: 全尺寸图片
幻灯片
图20(b)为扰动放大的频率曲线情况. 无控制时, 考虑和不考虑涡黏性影响的计算结果相近, 扰动最高放大的频率在0.12 ~ 0.14之间, 随x/H站位的变化很小. 施加控制后, 不考虑和考虑涡黏性影响计算的扰动最高放大频率范围除很靠近板尾缘的小区域外, 都远低于无控制时, 且随着x/H站位距离的增大向更低频收缩. 考虑涡黏性计算的最高放大频率曲线比不考虑涡黏性时更低, 说明涡黏性对较高频率的扰动具有更大的抑制作用.上述稳定性分析结果, 可以解释施加控制件以后, 通过改变尾流速度剖面, 增大湍流尾流的涡黏性, 从而削弱扰动放大因子, 并缩小扰动放大的频率范围, 进而减小旋涡脱落形成机会, 削弱旋涡脱落强度的尾流控制机制.
4.
结论
在旋转振荡板的两侧对称地放置两个相同的窄条控制件, 研究其对板尾流的影响. 控制件分别位于板的前缘、中央和尾缘, 控制参数取窄条的横向坐标y/H. 在风洞中用烟线方法及热线风速仪, 对施加控制前后的旋转振荡板尾流进行流动显示及尾流平均和脉动速度测量, 并用标准?k-ε模型对相应尾流进行数值模拟. 不同振频和振幅下, 数值模拟的无控制和有控制涡量场, 与流动显示的尾流旋涡流场具有很高相似度. 数值模拟的不同流向站位的平均速度剖面、脉动速度均方根分布和脉动速度功率谱, 与测量结果在曲线形状上很相似, 具体数值整体上相差不大, 吻合度良好. 流动显示图说明, 在一定横向位置y/H下, 对不同振幅和振频的振荡, 前缘、中央和尾缘控制件都对板尾流大尺度旋涡脱落具有抑制效果. 从控制件上脱落的小尺度旋涡在下游移动和进入板尾流过程中由清晰变得模糊, 增强了板尾流的不规则脉动. 控制前后尾流脉动速度功率谱主峰峰值比, 代表旋涡脱落抑制效果. 根据测量结果, 当板振幅β

