OUTPUT CHARACTERISTIC ANALYSIS OF SINGLE GIMBAL CONTROL MOMENT GYROSCOPE1)
Huang Zhilai*,?, Li Xinyuan*, Jin Dongping,*,2)*State Key Laboratory of Mechanics and Control of Mechanical Structures, College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China ?School of Mechanical Engineering, Anhui University of Technology, Ma'anshan 243002, Anhui, China
Abstract The single-gimbal control moment gyroscope (SCMG), which is widely used in aerospace field, has the advantage of torque amplification effect. It is based on the principle of torque amplification with some hypotheses. In this paper, the output characteristics of SCMG are analyzed without those hypotheses. By considering the motion of the mounting base, the output torque model of SCMG with a two-dimensional input and three-dimensional output is obtained, in which the adjustable and nonadjustable parts are identified. In order to analyze the output characteristics of SCMG, two parameters are defined. One is the ratio of the norms about the SCMG's output to input torque vectors. The other is the ratio of the norm about the SCMG's used and unused torque vector, which is to represent the utilization ratio of the SCMG's output torque. In all feasible regions, the results show that the characteristic parameters of torque output are is not always greater than 1, i.e., SCMG does not always has torque amplification effect and efficient torque utilization, which are closely related to the state of SCMG. Finally, for the spacecraft attitude maneuver task with two SCMGs, the simulation of non-diagonal singular robust control and optimal control is completed. It is found that the control effect is closely related to the output characteristic parameters which are determined by the system state. At the same time, the optimal control with a SCMG is used to realize the three-dimensional attitude maneuver of a spacecraft based on the three-dimensional output characteristics of SCMG. The simulation results show that the SCMG always has the torque amplification effect and the efficient torque utilization in the process of optimal control. Keywords:spacecraft;control moment gyroscope;output characteristics;torque amplification effect;utilization of torque
PDF (1452KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 黄志来, 李新圆, 金栋平. 单框架控制力矩陀螺输出特性分析1). 力学学报[J], 2021, 53(2): 511-523 DOI:10.6052/0459-1879-20-306 Huang Zhilai, Li Xinyuan, Jin Dongping. OUTPUT CHARACTERISTIC ANALYSIS OF SINGLE GIMBAL CONTROL MOMENT GYROSCOPE1). Chinese Journal of Theoretical and Applied Mechanics[J], 2021, 53(2): 511-523 DOI:10.6052/0459-1879-20-306
引言
傅科(Foucault)于1852年首次提出"陀螺"概念[1], 可利用陀螺的力学特性设计执行器, 称之为控制力矩陀螺(control moment gyroscope, CMG). 半个世纪以来, CMG广泛用于航天器姿态控制[2], 并随着航天器控制任务的多样化[3-4], 从姿态控制逐渐延伸到能量存储[5]、振动抑制[6]等领域.
CMG有两种机械结构, 单框架(SCMG)[7]和双框架(double-gimbal control moment gyro, DCMG)[8]. 飞轮可调速时, CMG演化成变速控制力矩陀螺(variable-speed control moment gyro, VCMG), 按其机械结构分类, 有单框架变速控制力矩陀螺(single-gimbal variable-speed control moment gyro, SVCMG)[9]和双框架变速控制力矩陀螺(double-gimbal variable-speed control moment gyro, DVCMG)[10-11]. 相比于DCMG, SCMG机械结构简单, 但存在奇异性问题, 而前者机械结构和控制算法更加复杂, 两者同属于多体系统, 本文仅关注航天领域应用最广的SCMG.
TabarovskiiAM. On the stability of motion of foucault gyroscopes with two degrees of freedom Journal of Applied Mathematics & Mechanics, 1960,24(5):1206-1213 [本文引用: 1]
ToriumiFY, AngelicoBA. Nonlinear controller design for tracking task of a control moment gyroscope actuator IEEE/ASME Transactions on Mechatronics, 2020,25(1):438-448 [本文引用: 1]
( WangEnmei, WuShunan, WuZhigang. Active-control-oriented dynamic modelling for on-orbit assembly space structure Chinese Journal of Theoretical and Applied Mechanics. 2020,52(3):805-816 (in Chinese)) [本文引用: 1]
( LuoCaoqun, SunJialiang, WenHao, et al. Research on separation strategy and deployment dynamics of a space multi-rigid-body system Chinese Journal of Theoretical and Applied Mechanics. 2020,52(2):503-513 (in Chinese)) [本文引用: 1]
YoonH. Spacecraft attitude and power control using variable speed control moment gyros [PhD Thesis]. Atlanta: Georgia Institute of Technology, 2004 [本文引用: 1]
SasakiT, ShimomuraT, PullenS. et al. Attitude and vibration control with double-gimbal variable-speed control moment gyros Acta Astronautica, 2018,152(11):740-751 [本文引用: 1]
ValkL, BerryA, ValleryH, Directional singularity escape and avoidance for single-gimbal control moment gyroscopes Journal of Guidance Control and Dynamics, 2018,41(5):1095-1107 [本文引用: 1]
SasakiT, AlcornJ, SchaubH. et al. Convex optimization for power tracking of double-gimbal variable-speed control moment gyroscopes Journal of Spacecraft and Rockets, 2018,55(3):541-551 [本文引用: 1]
ZhaoH, LiuF, YaoY. Optimization design steering law for VSCMGs with the function of attitude control and energy storage Aerospace Science and Technology, 2017,65(6):9-17 [本文引用: 1]
SasakiT, ShimomuraT, SchaubH. Robust attitude control using a double-gimbal variable-speed control moment gyroscope Journal of Spacecraft and Rockets, 2018,55(5):1235-1247 [本文引用: 1]
StevensonD, SchaubH. Nonlinear control analysis of a double-gimbal variable-speed control moment gyroscope Journal of Guidance Control and Dynamics, 2012,35(3):787-793 [本文引用: 1]
HuQL, TanX. Dynamic near-optimal control allocation for spacecraft attitude control using a hybrid configuration of actuators IEEE Transactions on Aerospace and Electronic Systems, 2020,56(2):1430-1443 [本文引用: 1]
GuoJT, GengYH, KongXR. Pyramid-type single-gimbal control moment gyro system singularity avoidance using gimbal reorientation Journal of Guidance Control and Dynamics, 2020,43(6):1180-1189 [本文引用: 1]
YoshikawaT. A Steering law for a roof type configuration of single gimbal control moment gyro system IFAC Proceedings Volumes, 1975,8(1):361-369 [本文引用: 1]
TangL, XuSJ. Geometric analysis of singularity for single-gimbal control Moment gyro systems Chinese Journal of Aeronautics, 2005,18(4):295-303 [本文引用: 1]
KawajiriS, MatunagaS. Singularity avoidance/passage steering logic for a variable-speed double-gimbal control moment gyro based on inverse kinematics Transactions of The Japan Society for Aeronautical and Space Sciences, Space Technology Japan, 2018,16(2):188-194 [本文引用: 1]
MarguliesG, AubrunJN. Geometric theory of single-gimbal control moment gyro system Journal of the Astronnutical Sciences, 1978,26(2):159-191 [本文引用: 1]
WieB. Singularity analysis and visualization for single-gimbal control moment gyro systems Journal of Guidance Control and Dynamics, 2004,27(2):271-282 [本文引用: 1]
KurokawaH. Constrained steering law of pyramid-type control moment gyros and ground tests Journal of Guidance Control and Dynamics, 1997,20(3):445-449 [本文引用: 1]
LeeghimH, LeeCY, JinJ. et al. A singularity-free steering law of roof array of control moment gyros for agile spacecraft maneuver International Journal of Control Automation and Systems, 2020,18(7):1679-1690 [本文引用: 1]
GuoYN, WangPY, MaGF. et al. Envelope oriented singularity robust steering law of control moment gyros for spacecraft attitude maneuver Transactions of the Institute of Measurement and Control, 2019,41(4):954-962 [本文引用: 1]
PechevAN. Feedback-based steering law for control moment gyros Journal of Guidance Control and Dynamics, 2007,30(3):848-855 [本文引用: 1]
MengT, MatunagaS. Modified singular-direction avoidance steering for control moment gyros Journal of Guidance Control and Dynamics, 2012,34(6):1915-1920 [本文引用: 1]
SchaubH, JunkinsJL. Singularity avoidance using null motion and variable-speed control moment gyros Journal of Guidance Control and Dynamics, 2000,23(1):11-16 [本文引用: 1]
KurokawaH. Survey of theory and steering laws of single-gimbal control moment gyros Journal of Guidance Control and Dynamics, 2007,30(5):1331-1340 [本文引用: 1]
HoelscherBR, VadaliSR. Optimal open-loop and feedback control using single gimbal control moment gyroscopes Advances in the Astronautical Sciences, 1994,42(2):189-206 [本文引用: 1]
BiggsJD, LivorneseG. Control of a thrust-vectoring cubeSat using a single variable-speed control moment gyroscope Journal of Guidance Control and Dynamics, 2020,43(10):1865-1880 [本文引用: 1]
( CaoDengqing, BaiKunchao, DingHu, et al. Advances in dynamics and vibration control of large-scale flexible spacecraft Chinese Journal of Theoretical and Applied Mechanics. 2019,51(1):1-13 (in Chinese)) [本文引用: 1]
( HuQuan, JiaYinghong, XuShijie. An improved Kane's method for multibody dynamics Chinese Journal of Theoretical and Applied Mechanics. 2011,43(5):968-972 (in Chinese)) [本文引用: 1]
LappasVJ, SteynWH, UnderwoodCI. Torque amplification of control moment gyros Electronics Letters, 2002,38(15):837-839 [本文引用: 2]
AlcornJ, AllardC, SchaubH. et al. Fully coupled reaction wheel static and dynamic imbalance for spacecraft jitter modeling Journal of Guidance Control and Dynamics, 2018,41(6):1380-1388 [本文引用: 1]
WieB. Singularity escape/avoidance steering logic for control moment gyro systems Journal of Guidance Control & Dynamics, 2005,28(5):948-956 [本文引用: 1]
YoonH, TsiotrasP. Singularity analysis of variable speed control moment gyros Journal of Guidance Control and Dynamics, 2004,27(3):374-386 [本文引用: 2]
WuPC, WenH, ChenT. et al. Model predictive control of rigid spacecraft with two variable speed control moment gyroscopes Applied Mathematics and Mechanics (English Edition), 2017,38(11):1551-1564 [本文引用: 1]
 ,*,2)
,*,2)
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT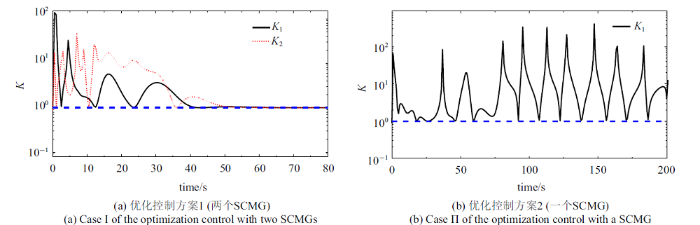 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT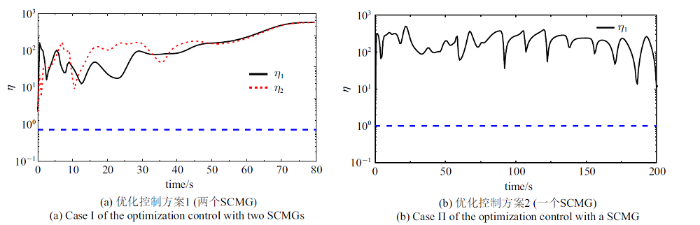 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}