 ,1, 崔国贤,1,2,*, 李绪孟,2,*, 佘玮1, 崔丹丹1, 赵亮1, 苏小惠1, 王继龙1, 曹晓兰1, 刘婕仪1, 刘皖慧1, 王昕惠1
,1, 崔国贤,1,2,*, 李绪孟,2,*, 佘玮1, 崔丹丹1, 赵亮1, 苏小惠1, 王继龙1, 曹晓兰1, 刘婕仪1, 刘皖慧1, 王昕惠1Estimation of ramie yield based on UAV (Unmanned Aerial Vehicle) remote sensing images
FU Hong-Yu,1, CUI Guo-Xian,1,2,*, LI Xu-Meng,2,*, SHE Wei1, CUI Dan-Dan1, ZHAO Liang1, SU Xiao-Hui1, WANG Ji-Long1, CAO Xiao-Lan1, LIU Jie-Yi1, LIU Wan-Hui1, WANG Xin-Hui1通讯作者:
收稿日期:2020-02-1接受日期:2020-04-15网络出版日期:2020-09-12
| 基金资助: |
Received:2020-02-1Accepted:2020-04-15Online:2020-09-12
| Fund supported: |
作者简介 About authors
付虹雨, E-mail:

摘要
关键词:
Abstract
Keywords:
PDF (2079KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
付虹雨, 崔国贤, 李绪孟, 佘玮, 崔丹丹, 赵亮, 苏小惠, 王继龙, 曹晓兰, 刘婕仪, 刘皖慧, 王昕惠. 基于无人机遥感图像的苎麻产量估测研究[J]. 作物学报, 2020, 46(9): 1448-1455. doi:10.3724/SP.J.1006.2020.04020
FU Hong-Yu, CUI Guo-Xian, LI Xu-Meng, SHE Wei, CUI Dan-Dan, ZHAO Liang, SU Xiao-Hui, WANG Ji-Long, CAO Xiao-Lan, LIU Jie-Yi, LIU Wan-Hui, WANG Xin-Hui.
作物产量估测是精准农业的重要研究内容, 是市场风险管理、政策调整的重要决策信息源[1]。利用随机取样方法估测产量工作量大, 准确度较低, 无法满足现代农业的需求; 基于田间作物表型特征数据构建作物生长模型以预测作物产量的方法显著提高了估产的准确率[2,3,4]。株高作为重要的表型特征, 是评估作物生长的重要指标, 对长势监测具有重要参考价值[5,6,7,8], 而且当作物产量与株高紧密相关时, 株高对产量估测也有重要参考价值。
无人机遥感系统具有快速、无损、成本低、通量高的优势, 被越来越多地用于作物表型研究的数据获取, 并逐步地应用于农业生产过程中作物生长状况的监测, 以实现田间管理决策和作物产量预测[9,10,11,12]。无人机遥感系统由无人机与其搭载的微小型多光谱、高光谱等传感器组成, 但这些传感器的高昂价格一定程度上影响了农业无人机遥感技术的推广和应用。高清数码相机作为一种廉价的传感装置吸引了国内外****的关注, 在性能上, 它同样可获得高分辨率的RGB色彩图像[13,14]。
前人利用无人机-RGB高清数码相机构成的低空遥感系统在作物表型监测和作物模型构建上已经取得了一定的进展, 利用无人机-RGB系统获取的R、G、B三通道均值以及POS数据可用于监测作物的含氮水平[15]、LAI[16,17]、株高等。在株高监测研究上, 如Chang等[18]利用无人机获取高粱的数字遥感图像, 基于运用SFM算法生成的数字地面模型和数字表面模型得到了作物的株高, 结果表明, 估测株高与实测值的RMSE为0.33 m。牛庆林等[19]结合地面控制点, 基于无人机拍摄的遥感图像生成作物数字表面模型, 从而提取了精度较高的玉米株高, 实测株高和估测株高之间的R2、RESE、nRMSE, 分别为0.93、28.69 cm、17.9%。Watanabe等[20]利用无人机搭载RGB-NIR-GB相机建立了高粱株高表型系统, 基于数字地表模型得到的实测株高和估测株高之间的相关系数为0.523。在产量预测研究上, Bendig等[21]基于无人机的多时序作物表面模型(CSMs)获得了夏季麦的株高信息, 株高模型的R2在0.80~0.82之间, 同时结合选定的植被指数和株高, 提高了生物量预测的效果。Geipel等[22]利用无人机遥感系统获取了3种不同分辨率下的作物株高, 同时融合株高和作物覆盖度建立了3个线性回归模型, 最佳模型的决定系数达到0.74。Li等[23]利用低空无人机遥感系统, 融合常见的光谱植被指数和株高建立了产量预测模型, 其决定系数可达到0.88。虽然Li建立的模型的预测表现较好, 但其研究对象玉米的代表性并不大, 无法体现株高为主要产量因子的作物的优势, 且玉米冠层覆盖率低, 株高受混合像元的影响存在一定误差。
以往的研究肯定了利用无人机遥感系统监测水稻、高粱、大豆等作物株高的可行性, 但针对苎麻株高的监测研究很少, 基于不同苎麻种质, 融合苎麻株高和可见光光谱图像信息进行产量预测的研究更缺乏。本研究利用无人机搭载RGB相机获取苎麻苗期和成熟期的高清图像, 结合地面控制点生成数字表面模型以获取苎麻的株高; 基于不同苎麻种质, 利用无人机遥感影像数码信息建立苎麻产量估测模型, 为不同苎麻种质特征评价以及苎麻的长势和产量估测提供一种快速、无损的技术方法。
1 材料与方法
1.1 试验材料与设计
试验于2019年6月至7月在湖南省长沙市芙蓉区湖南农业大学耘园教学基地(28°11°01.981"N, 113°04°10.159"E)进行, 该区域地形相对平坦, 为无人机进行苎麻遥感监控提供了条件。同时, 基地地处湘中区域, 属于亚热带季风性湿润气候, 降水充沛, 光热条件良好, 苎麻生长良好。选用湖南农业大学苎麻试验田内26个不同品种的苎麻, 随机区组设3次重复, 共78个小区。苎麻为壮龄麻, 每小区为2.0 m×1.8 m, 3行×4蔸, 蔸间距0.4 m, 行间距0.6 m, 排水沟宽0.5 m。此外, 增选相同试验区内湘苎3号、湘苎7号2个苎麻品种作为株高估测的验证组, 每种材料分为12个小区, 共24个小区, 每个小区面积约为12 m2, 4行×8列。为了完成后期模型的重建, 提高经纬、高程位置校准的精度, 试验地从空间和高度上均匀布置了8个地面控制点(GCP), 具体试验小区分布图见图1。
图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1试验小区分布图
Fig. 1Locations of test plot
1.2 数据获取与处理
采用大疆悟2四旋翼无人机遥感平台, 搭载的传感器为Zenmuse X5S 35 mm高清数码相机, 有效像素可达2080万, 最大分辨率为5280×3956。在2019年二季苎麻生长期, 于苗期(6月10日)和成熟期(7月26日)进行飞行作业采集苎麻试验田的冠层图像。每次飞行采取距离地面15 m的高度搭配-90°云台俯仰角进行拍摄, 为确保图像信息的完整, 设置主航向上重叠率80%, 主航线间图像重叠率70%。为避免云层遮挡以及太阳光线影响, 选择在晴朗无风天气的10:00—12:00时间段飞行, 该时间段光线状况好, 有利于后期图像观察和处理。在飞行任务执行前设置拍摄参数、航线规划, 选择自动曝光模式, 避免不同飞行任务进行时不合适参数对图像的影响。使用Pix4Dmapper软件拼接无人机拍摄图像。从无人机图像中提取POS数据, 检查POS数据中的相片号与图像数据相片号是否一致, 以确保经度、纬度、高度、航向倾角、旁向倾角、相片旋角的吻合; 通过筛选寻找包含某一点M的全部图像, 提取M点的空间位置和姿态信息, 完成对M点的还原并生成试验区域的点云图; 使用空三射线编辑器加入控制点三维空间信息, 保证不同时期获取的拼接图像在同一坐标位置体系下; 基于GCPs对应的三维空间位置生成苎麻试验区域的DSM图像和正射图像。
受田间沟壑以及试验地地形地势的影响, 不同地点的海拔高度之间存在一定的误差。为缩小地势不均匀导致的株高测量不准确, 运用ArcMap中的缓冲区处理对不同品种不同处理的小区进行划分, 缓冲区建立在各小区内部, 避免较低沟壑以及作物生长的边缘效应影响。
1.3 研究方法
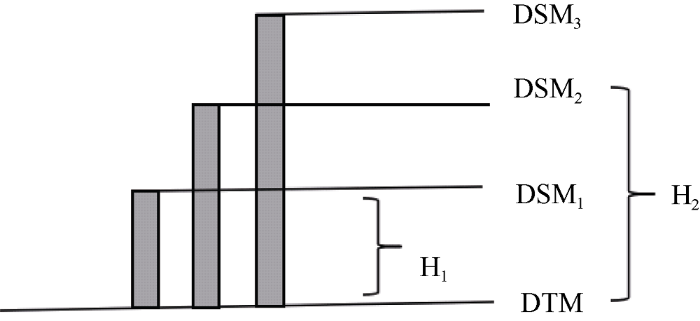
1.3.1 株高的估算 无人机-RGB系统遥感的株高是通过数字表面模型(DSM)与数字地面模型(DTM)之间的差值计算。苗期作物的株高近似为0 m, 将该时期的DSM定义为DTM, 基于苗期采集的试验田图像构建DTM模型, 并获取控制点的三维空间信息, 作为相对的坐标系统, 应用于后期各个作物生长期DSM的建立。如图2所示, DSMi为第i阶段作物到达的高度, 则DSMi-DTM得到第i阶段作物的株高Hi。图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图2基于无人机遥感图像的株高测量原理
Fig. 2Principle of plant height measurement based on UAV remote sensing images
从每个小区内随机选取15株植株, 使用高于植株高度的带有刻度的塔尺测量植株主茎顶部与地面之间的最短距离, 取15个实测值的平均值作为该小区作物群体的株高。进而, 计算各品种实测产量与株高之比, 比值记为a。
1.3.2 植被指数的计算 基于成熟期试验田的正射图像, 利用ArcGIS Map提取各小区冠层图像的RGB通道均值。参考以往研究的经验, 将3个通道的平均值进行数学组合, 形成5个可见光植被指数和6个数码图像变量, 分别为红光标准化值(r)、绿光标准化值(g)、蓝光标准化值(b)、红绿蓝植被指数(rgbVI)、过红指数(ExR)、过绿指数(ExG)、过红绿指数(ExGR)以及WI。WI是水分敏感的植被指数, 由于健康的绿色植物吸收短波红外辐射, 具有较高的湿度值, 因此, WI可作为作物健康状况及生物量预测的重要指标。选择的大多数植被指数基于绿光指数生成, 绿色指数与作物的生长情况表现出更强的关联[24]。具体图像光谱参数定义及参考文献如表1所示。
Table 1
表1
表1光谱植被指数及数码图像变量定义
Table 1
| 变量 Variable | 定义 Definition | 参考来源Source |
|---|---|---|
| R | r=R/(R+G+B) | |
| G | g=G/(R+G+B) | |
| B | b=B/(R+G+B) | |
| g/r | g/r=g/r | |
| g/b | g/b=g/b | |
| r/b | r/b=r/b | |
| GLA | GLA=(2*G-R-B)/(2*G+R+B) | [19] |
| ExR | ExR=1.4R-G | [15] |
| ExG | ExG=2*G-R-B | [15] |
| ExGR | ExGR=ExG-1.4R-G | [20] |
| WI | (G-B)/(R-G) | [20] |
新窗口打开|下载CSV
1.3.3 变异系数与多样性指数的计算 变异系数(CV)是概率分布离散程度的一个归一化量度, 其定义为标准差与平均值之比。多样性指数(H')可以用来评价表型性状的等级分布情况, 首先使用Microsoft Excel软件, 采用四分点原则对各性状分级, 将数据分为5个区间, 四分点分别为($\bar{X}$- 1.2818S)、($\bar{X}$- 0.5426S)、($\bar{X}$+ 0.5426S)、($\bar{X}$+ 1.2818S), 然后计算H' = -∑Pi × lnPi, 其中Pi = Ni/N, Pi为某表型性状第i级内个体数占总个体数的百分比, Ni表示某表型性状第i级内个体数, N为个体总数[25]。
1.4 产量估测模型的建立
于2019年7月30日收获试验区苎麻, 以苎麻鲜皮重作为产量评估指标, 先利用麻骨与麻皮间物理机械性质的不同, 采用扯剥法获取苎麻鲜皮, 进而利用电子秤称取各单位小区苎麻鲜皮重量。为了探究不同解释变量组合对产量预测模型的影响, 选取13个变量(包括11个图像光谱信息参数和2个株高参数)进行逐步线性回归分析, 并计算模型的R2值、RMSE。选择优化后的逐步回归模型对验证组产量评价, 使用R2、RMSE作为评价估产模型和验证模型的指标。模型的R2值越大, 相对应的RMSE值越小, 说明其预测能力越好。
2 结果与分析
2.1 基于无人机遥感影像的苎麻株高估测
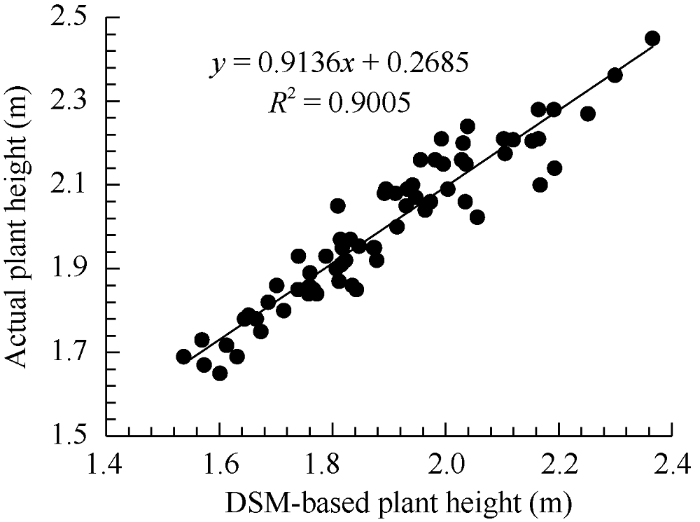
基于Pix4D mapper生成的苎麻冠层2个生育期的DSM (图3), 利用ArcMap将每个小区分割为相互独立的缓冲区, 在缓冲区内采用“差分法”分别估测群体株高。为检验该方法提取株高的精度, 建立DSM-based H与实测株高的线性回归模型(图4)。图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3苗期和成熟期DSM
Fig. 3DSM at seeding and maturity stages
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4DSM提取株高的精度分析
Fig. 4Precision analysis of DSM-based plant height
基于DSM提取的苎麻株高集中在1.7~2.0 m, 而地面实测株高大部分植株达到了1.8~2.2 m, DSM-based H普遍低于实测值, 造成这一现象的原因主要是, (1)无人机-RGB系统拍摄的苎麻冠层图像包含裸土、低层植株叶片等低于植株最高点的物体, 在进行冠层点云重建时, 受混合像元影响, 算法自动去除最高点较小结构的信息, 导致计算株高偏低。(2)无人机在执行飞行任务时, 叶片高速旋转吹动下方苎麻, 导致部分苎麻倾倒, 株高信息受损。分析DSM-based H和实测株高之间的相关性, 其模型拟合程度高(R2=0.90), 两者之间的绝对误差为0.11 m, 相对误差为0.05%, 肯定了利用无人机-RGB系统监测大田群体苎麻株高的可行性。
基于实测株高和DSM-based H线性回归模型y = 0.9136×DSM-based H + 0.2685对DSM-based H校正, 得到校正后的估测株高。校正后的DSM-based H与实测株高之间的绝对误差为0.04 m, 相对误差为0.02%。
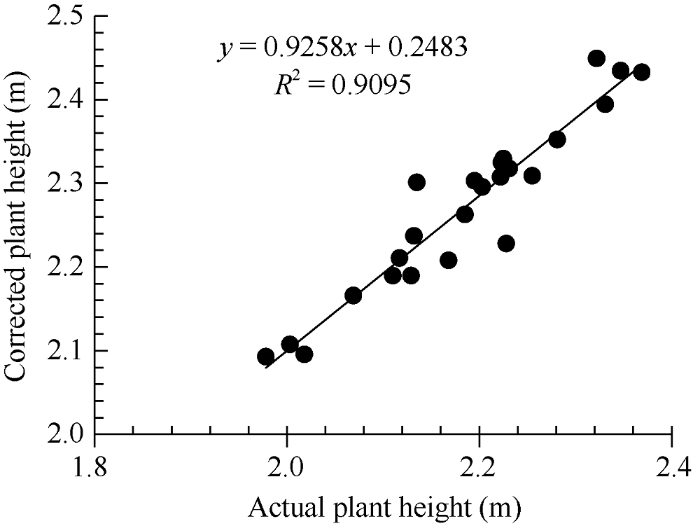
选择湘苎3号和湘苎7号的24个试验小区作为验证样本, 进一步检验苎麻株高估测方法和校正模型的可行性(图5), 基于线性回归模型y = 0.9136×DSM-based H + 0.2685对DSM-based H校正, 校正后的DSM-based H与实测株高存在明显相关性(R2=0.91), 绝对误差为0.08 m, 相对误差为0.04%, 表明DSM-based H具有较高的精度, 该株高测量方法克服了传统地面株高测量的不足, 为大范围、高覆盖密度作物株高测量提供补充。
图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5无人机遥感图像DSM测定株高模型的验证
Fig. 5Verification of DSM-based plant height model
2.2 种质资源差异分析
不同品种苎麻所继承的遗传基因使苎麻在表型性状上表现出明显种内差异, 不同程度上对产量也造成影响。基于DSM图像和正射图像对26个苎麻种质间的图像光谱表型性状以及产量株高比a (产量/株高)性状的差异性与多样性分析(表2)表明, 26个不同品种苎麻的冠层图像性状多样性指数平均值为1.48, 其中GLA值最大为2.25, rgbVI值最小为1.21, 且10个指标的多样性指数都在1.21~2.25的范围之内, 说明各苎麻资源在冠层图像光谱参数以及产量株高比参数上的分级划分较为均匀。在变异系数上, 10个冠层图像性状变异系数范围分布不均, 浮动于0.21%~20.90%之间, 平均变异系数为7.61%, 其中产量株高比的变异系数最大为20.90%, 其次, WI值变异系数为14.87%。26个苎麻品种在各参数上都显示出了一定的变异性, 说明不同苎麻资源之间存在较大的差别, 产量构成因素变异丰富, 在进行苎麻产量估测时需要充分考虑不同苎麻品种之间的差异。Table 2
表2
表2苎麻种质资源差异与多样性分析
Table 2
| 性状 Trait | r | G | b | g/r | g/b | r/b | rgbVI | WI | GLA | a | 平均值Mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 平均值Mean | 0.31 | 0.43 | 0.25 | 1.39 | 1.72 | 1.23 | 0.05 | -1.99 | 0.26 | 1.45 | |
| 最小值Min. | 0.29 | 0.42 | 0.21 | 1.30 | 1.49 | 1.03 | 0.049 | -2.81 | 0.24 | 0.91 | |
| 最大值Max. | 0.34 | 0.45 | 0.28 | 1.51 | 2.05 | 1.58 | 0.05 | -1.50 | 0.33 | 2.05 | |
| 变异系数CV (%) | 3.43 | 1.68 | 6.06 | 3.00 | 7.78 | 9.79 | 2.37 | 14.87 | 6.25 | 20.90 | 7.61 |
| 多样性指数H' | 1.41 | 1.33 | 1.42 | 1.38 | 1.39 | 1.44 | 1.21 | 1.44 | 2.25 | 1.49 | 1.48 |
新窗口打开|下载CSV
2.3 产量影响因子相关性分析
提取每个小区的遥感图像光谱参数和株高参数进行相关性分析, 如表3所示。在所有解释因子中, 株高参数相比于光谱参数能更好地反映苎麻的产量情况。其中, DSM-based H与产量之间的相关系数达到0.61。特别地, 将DSM-based H与各品种产量株高比a进行二次处理后得到的E (E=DSM-based H×a)与产量之间存在最大的相关性, 相关系数达到0.91。光谱参数与产量之间的相关性不明显, 其中, b值与产量的相关系数最高, 达到0.34, 其次是WI值, 相关系数为0.32。同时, 产量与多项光谱参数之间存在负相关, g/b与产量之间的负相关系数最大(r = -0.33), 其次为r/b (r = -0.30)、g (r = -0.27)。Table 3
表3
表3苎麻产量与解释因子的相关系数
Table 3
| 产量Yield | E | DSM-based H | WI | ExGR | ExR | ExG | GLA | r | g | b | g/r | g/b | r/b | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 产量Yield | 1 | 0.91 | 0.61 | 0.32 | -0.05 | -0.19 | -0.14 | -0.21 | -0.25 | -0.27 | 0.34 | 0.12 | -0.33 | -0.30 |
| E | 1 | 0.57 | 0.29 | 0.02 | -0.15 | -0.21 | -0.20 | -0.23 | -0.27 | 0.32 | 0.11 | -0.31 | -0.27 | |
| DSM-based H | 1 | 0.25 | 0.08 | -0.22 | -0.06 | 0.00 | -0.26 | -0.06 | 0.24 | 0.22 | -0.23 | -0.26 | ||
| WI | 1 | 0.56 | -0.84 | -0.49 | -0.17 | -0.79 | -0.28 | 0.77 | 0.64 | -0.71 | -0.80 | |||
| ExGR | 1 | -0.64 | -0.52 | 0.05 | -0.44 | 0.27 | 0.22 | 0.54 | -0.13 | -0.32 | ||||
| ExR | 1 | 0.09 | -0.24 | 0.81 | -0.23 | -0.54 | -0.88 | 0.40 | 0.66 | |||||
| ExG | 1 | 0.66 | 0.25 | 0.63 | -0.51 | 0.03 | 0.58 | 0.43 | ||||||
| GLA | 1 | 0.03 | 0.75 | -0.39 | 0.30 | 0.51 | 0.26 | |||||||
| r | 1 | 0.14 | -0.87 | -0.90 | 0.77 | 0.95 | ||||||||
| g | 1 | -0.60 | 0.30 | 0.74 | 0.43 | |||||||||
| b | 1 | 0.58 | -0.98 | -0.98 | ||||||||||
| g/r | 1 | -0.42 | -0.72 | |||||||||||
| g/b | 1 | 0.93 | ||||||||||||
| r/b | 1 |
新窗口打开|下载CSV
对图像光谱参数和株高参数进行内部相关性分析表明, 各项图像光谱参数之间的内部相关性普遍较好, 其中植被指数WI值与ExR表现出来显著负相关(r = -0.84), WI与r/b之间的相关系数也达到-0.80, 这是因为各项光谱参数都是基于RGB通道均值的数学转换得到。株高参数与各项图像光谱参数之间的相关性并不明显, 其中r/b与株高表现出最高负相关性(r = -0.26), 其次为WI、g/b, 相关系数分别为r = 0.25、r = -0.23。
2.4 融合图像数据和种质差异的苎麻产量估算模型
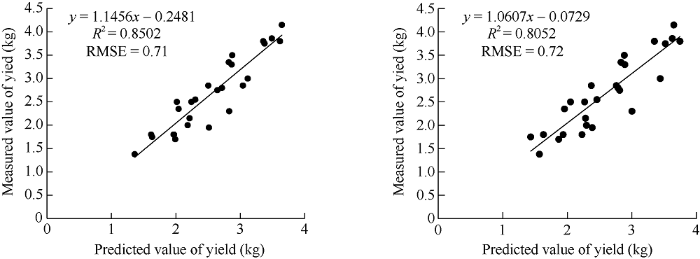
从26个品种的3个重复小区中随机选取2个, 共52个小区作为样本集, 剩余26个小区作为检验集。利用后向逐步线性回归评估各小区的13个变量因子, 建立产量估测模型, 其过程及结果分析如表4所示。基于考虑逐步线性回归, 得到2个苎麻产量预测模型, 模型1为Y1 = 0.91846X1 + 0.847968X2 - 1.34815 (其中X1为DSM-Based H, X2为E值)、模型2为Y2 = 1.0059X1 + 0.84546X2 - 0.0059X3 - 2.51473 (其中X1为DSM-Based H, X2为E值, X3为ExGR)。利用检验集分别对2个预测模型检验, 如图6所示, 模型1的预测产量与实际产量之间存在显著的线性关系, R2、RMSE分别为0.85、0.71; 模型2的预测产量与实际产量之间也存在显著的线性关系, R2、RMSE分别为0.81、0.73, 苎麻产量估测模型有较好的估测效果, 并且稳定性更好。图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6苎麻产量估测模型的检验
Fig. 6Test of ramie yield estimation model
Table 4
表4
表4后向逐步回归构建产量估测模型的过程及结果分析
Table 4
| 自变量个数 Number of independent variables | 变量组成 Parameter | R2 | RMSE |
|---|---|---|---|
| 13 | DSM-based H, E, WI, ExGR, ExR, ExG, GLA, r, g, b, g/r, g/b, r/b | 0.88 | 0.30 |
| 8 | DSM-based H, E, ExGR, ExR, r, b, g/r, r/b | 0.88 | 0.28 |
| 6 | DSM-based H, E, ExGR, r, ExR, b | 0.88 | 0.28 |
| 5 | DSM-based H, E, ExGR, ExR, r, | 0.87 | 0.28 |
| 3 | DSM-based H***, E***, ExGR* | 0.86 | 0.28 |
| 2 | DSM-based H**, E*** | 0.84 | 0.30 |
新窗口打开|下载CSV
3 讨论
3.1 基于无人机遥感系统的株高监测
作物株高的测量方法常有3种。第1种是利用带刻度标尺直接测量田间作物高度; 第2种是先采用固定装置获取植株的骨架信息, 然后根据骨架信息提取作物株高; 第3种是基于无人机遥感系统估测作物株高。相对于前2种测量方法, 第3种方法其优势在于, 无人机遥感可以避免接触式测量方法对作物造成的损害, 无人机遥感系统灵活、便捷, 能满足实时、大范围监测田间作物长势情况的需求[26,27]。现有文献[28], 以水稻、高粱、大豆等为研究对象, 基于无人机遥感影像分析方法, 研究了田间作物的株高估测。苎麻是我国重要的纤维作物之一, 目前尚无基于无人机遥感影像方法估测苎麻株高的研究, 为进一步评估无人机遥感影像方法估测作物株高的普遍适用性, 本文开展了无人机遥感影像方法估测苎麻株高的研究。本文基于无人机-RGB系统获取的苎麻冠层遥感影像生成了二季苎麻苗期和成熟期的DSM模型, 并利用“差分法”实现了大面积苎麻株高的提取, 结果表明, DSM-based H和实测株高之间具有极显著相关性(R2 = 0.90)。同时, 研究发现实测株高与估测值之间也存在误差, DSM-based H普遍低于实测值, 我们认为造成这一现象的原因包括3个方面。其一, 无人机获取的冠层遥感图像往往包含了裸土、低层植株叶片、以及临近的作物像素, 导致冠层空间点云重建时, DSM值受混合像元影响出现误差。当种植密度过于稀疏时, 冠层遥感图像存在较大空隙, 造成基于该遥感图像提取的株高偏低于实际株高; 另外, 当估测区域内种植多个品种时, 高密度种植也会影响估测株高的精度。为此, 可各小区内部划分缓冲区, 以消除边缘效应和临近小区植被的影响[29]。其二, 无人机飞行高度对株高测量也会产生一定的影响, 这种影响主要源于无人机桨叶旋转导致的植被摆动。试验表明, 在10、14、18 m 3种不同飞行高度下, 无人机遥感图像提取的株高存在差异。飞行高度越低, 飞行器越接近冠层, 桨叶旋转带动的风力对作物影响越大, 这使得拍摄的作物冠层包含较低叶片或裸土混合像元, 此时, 基于空间结构信息缺失的图像计算的株高将低于作物的实际株高[30]。其三, 多时期的DSM模型所对应的三维位置信息不具有精确一致性, 为提高估测精度, 要求在种植区域内均匀地设置多个具有固定位置的地面控制点, 控制点的位置应该覆盖整个种植区域, 且在高度上有一定的梯度补充。
DSM-Based H和实测株高间较高的相关性说明了无人机遥感系统对作物株高信息的估测效果, 因此, 我们可以在现有株高监测研究的基础上, 进一步优化方法以提高估测精度, 并设计一套自动、高效、适用于所有作物的株高监测系统, 这将对精准农业发展, 田间生产智慧管理, 农业资源整合具有极其重要的价值。
3.2 基于无人机遥感系统的苎麻产量估测
基于无人机遥感系统快速准确地估测作物产量对于精准农业的发展意义重大。目前基于无人机-高光谱遥感系统估测作物产量的研究相对较多, 其原因在于高光谱传感器能够获取更多波段的光谱信息, 提高模型对某些作物产量的估测能力。然而, 无人机-高光谱遥感系统价格昂贵, 无法提供完整的空间结构信息, 在构建估产模型时, 不仅忽视了株高对产量的影响, 而且会造成光谱信息过饱和。无人机-RGB遥感系统的发展为我们提供了一种廉价、便捷的手段, 它能实现空间结构数据和基本可见光光谱信息的提取, 对收获茎秆或茎秆表皮的作物的产量估测有重要作用。前人基于无人机遥感系统的研究证明, 光谱植被指数一定程度上可用于反映作物产量情况[31], 但在产量模型构建过程中, 选择最优的植被指数仍然存在瓶颈。目前已经被定义的植被指数有40多种[32], 如NDVI、DVI、RVI等, 并不是每一个植被指数都能正确反映某一作物品种的生长情况, 如果不考虑植被指数与产量之间的相关性, 多种植被指数的融合将会导致光谱信息饱和而减低估测模型的精度。随着光谱研究成为热点, 我们逐渐忽视了直接产量组成因素对产量估测的重大意义, 导致少有研究评估利用遥感影像提取的作物物理性状估测产量的能力。不同苎麻品种在茎粗、分蘖数、皮厚、株高等特征上存在明显差异, 本研究在构建估产模型时加入苎麻株高信息, 各品种产量株高比与DSM-Based H二次处理得到的E值提高了产量估测的精度。在今后的研究中, 可以考虑加入其他信息, 提升无人机遥感产量估测模型可靠性和精度。
参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.3389/fpls.2017.00421URLPMID:28400784 [本文引用: 1]

Genomics-assisted breeding methods have been rapidly developed with novel technologies such as next-generation sequencing, genomic selection and genome-wide association study. However, phenotyping is still time consuming and is a serious bottleneck in genomics-assisted breeding. In this study, we established a high-throughput phenotyping system for sorghum plant height and its response to nitrogen availability; this system relies on the use of unmanned aerial vehicle (UAV) remote sensing with either an RGB or near-infrared, green and blue (NIR-GB) camera. We evaluated the potential of remote sensing to provide phenotype training data in a genomic prediction model. UAV remote sensing with the NIR-GB camera and the 50th percentile of digital surface model, which is an indicator of height, performed well. The correlation coefficient between plant height measured by UAV remote sensing (PHUAV) and plant height measured with a ruler (PHR) was 0.523. Because PHUAV was overestimated (probably because of the presence of taller plants on adjacent plots), the correlation coefficient between PHUAV and PHR was increased to 0.678 by using one of the two replications (that with the lower PHUAV value). Genomic prediction modeling performed well under the low-fertilization condition, probably because PHUAV overestimation was smaller under this condition due to a lower plant height. The predicted values of PHUAV and PHR were highly correlated with each other (r = 0.842). This result suggests that the genomic prediction models generated with PHUAV were almost identical and that the performance of UAV remote sensing was similar to that of traditional measurements in genomic prediction modeling. UAV remote sensing has a high potential to increase the throughput of phenotyping and decrease its cost. UAV remote sensing will be an important and indispensable tool for high-throughput genomics-assisted plant breeding.
DOI:10.1016/j.jag.2015.02.012URL [本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.ecolind.2016.03.036URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.compag.2014.09.021URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1186/s13007-018-0324-5URLPMID:29997682 [本文引用: 1]
Background: Plant height is an important morphological and developmental phenotype that directly indicates overall plant growth and is widely predictive of final grain yield and biomass. Currently, manually measuring plant height is laborious and has become a bottleneck for genetics and breeding programs. The goal of this research was to evaluate the performance of five different sensing technologies for field-based high throughput plant phenotyping (HTPP) of sorghum [Sorghum bicolor (L.) Moench] height. With this purpose, (1) an ultrasonic sensor, (2) a LIDAR-Lite v2 sensor, (3) a Kinect v2 camera, (4) an imaging array of four high-resolution cameras were evaluated on a ground vehicle platform, and (5) a digital camera was evaluated on an unmanned aerial vehicle platform to obtain the performance baselines to measure the plant height in the field. Plot-level height was extracted by averaging different percentiles of elevation observations within each plot. Measurements were taken on 80 single-row plots of a US x Chinese sorghum recombinant inbred line population. The performance of each sensing technology was also qualitatively evaluated through comparison of device cost, measurement resolution, and ease and efficiency of data analysis. Results: We found the heights measured by the ultrasonic sensor, the LIDAR-Lite v2 sensor, the Kinect v2 camera, and the imaging array had high correlation with the manual measurements (r >/= 0.90), while the heights measured by remote imaging had good, but relatively lower correlation to the manual measurements (r = 0.73). Conclusion: These results confirmed the ability of the proposed methodologies for accurate and efficient HTPP of plant height and can be extended to a range of crops. The evaluation approach discussed here can guide the field-based HTPP research in general.
DOI:10.3390/rs8121031URL [本文引用: 1]
DOI:10.3390/rs8090786URL [本文引用: 1]
DOI:10.1016/j.rse.2010.06.011URL [本文引用: 1]
DOI:10.1016/j.compag.2008.03.009URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}