倾转旋翼存在3个飞行器模式:旋翼模式、过渡模式、固定翼模式。其中过渡模式由于其不确定性、耦合性、时变性导致控制系统设计最为复杂。倾转旋翼过渡过程控制可以分为3个部分:控制算法、控制分配算法和倾转角度变化曲线。目前过渡过程的控制中主要关注控制算法和控制分配算法的设计,对倾转角变化曲线研究相对较少。
倾转角变化曲线可以分为预设法和在线法2种。预设法即预先设定倾转角方案曲线,过渡过程中严格按照曲线倾转,目前主要有:匀速倾转和“S”型曲线倾转2种方式。在倾转旋翼过渡过程的研究中对倾转角曲线关注较少,基本是采用较为简单的匀速倾转方式[1-5],该方法的特点是:设计简单,计算量小,执行机构压力小,但是在过渡结束阶段会造成超调和振荡。Ta等[6]研究倾转旋翼航迹规划的时候提出运动剖面算法,以减小到达航迹点时的超调和振荡,而后,其在研究倾转旋翼控制时将该算法用来设计倾转角方案曲线[7]。鲁麟宏等[8]在研究基于矫正广义走廊的电动倾转旋翼机模态转换时也采用了该方案曲线。Yeo和Liu[9]研究倾转四旋翼的过渡过程提出基于Sigmod函数倾转方案。赖水清等[10]也曾提出过3个阶段的倾转的短舱倾转规律,但是未给出具体的曲线形式。
在线法是在过渡过程中设置反馈控制器,根据飞行器的状态来调整倾转角速度。张飞等[11]以高度和俯仰角为输入,倾转角速度为输出,应用模糊控制方法得到了倾转曲线控制方案,降低了过渡过程中飞行器的振荡。在倾转旋翼过渡过程中,飞行器按飞行走廊曲线飞行,飞行器的状态量与预先设计的值不会相差很大,所以采用预设倾转角曲线的方式就可以达到稳定过渡,同时预设方案可以减小控制器的计算量。目前的预设倾转角曲线基本是通过人为经验确定,忽视了倾转角曲线对过渡过程性能的影响。
本文研究优化倾转角曲线来提高过渡过程稳定性。首先,建立后三点式动力布局的电动倾转旋翼飞行器动力学模型,对飞行器配平得出了过渡过程的飞行走廊曲线;然后,根据过渡过程中的横向耦合关系以及能量特性,建立了优化模型,提出了改进运动剖面算法,将最优控制问题转化为一个参数优化问题;最后,建立了考虑横侧控制耦合和能量损耗的优化模型。并运用遗传算法进行求解,引入舵机模型,根据舵机系统时域响应特性对曲线进行设计,得到最优倾转角曲线。
1 飞行器动力学模型 在倾转旋翼的动力系统配置方案中,两旋翼纵向控制不稳定;四旋翼及其更多电机配置飞行效率低;倾转三旋翼是在控制稳定性以及效率方面综合的最佳动力布局,三倾转旋翼又分为前三点式动力布局和后三点式动力布局,为了更好地保证飞行器的平飞静稳定性,一般采用后三点式动力布局(如图 1所示)。
 |
| 图 1 飞行器动力布局 Fig. 1 Aircraft dynamic layout |
| 图选项 |
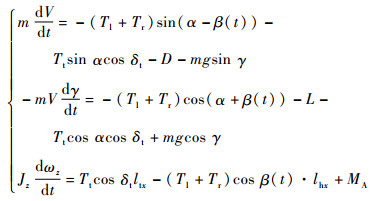
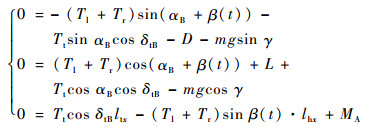
倾转旋翼过渡过程主要关心高度和速度的变化,因此建立飞行器在铅锤平面内的动力学模型为
 | (1) |
式中:m为质量;V为速度;lhx、ltx分别为前发动机和后发动机到质心的纵向力臂;L和D分别为升力和阻力;MA为飞行器俯仰方向的俯仰气动力矩;β为头部2个电机的倾转角度;δt为尾部舵机的倾转角度;Tl和Tr分别为头部左右两侧电机推力;Tt为尾部电机推力;α为飞行器迎角;γ为飞行器的航迹倾角;J为轴转动惯量;ω为角速度。
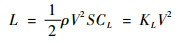
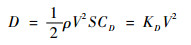
在整个过程中忽略舵偏角对升力和阻力的影响,升力和阻力可以分别表示为
 | (2) |
 | (3) |
式中:ρ、S、CL和CD分别为大气密度、机翼面积、升力系数和阻力系数;KL和KD为升力和阻力与速度无关项。
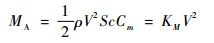
俯仰气动力矩表示为
 | (4) |
式中:c和Cm分别为平均气动弦长和俯仰力矩系数;KM为气动力矩与速度无关项。
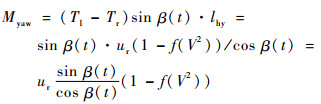
对飞行器过渡过程进行研究需要得到飞行器的倾转走廊曲线[12-13],对飞行器纵向动力学模型进行配平可得
 | (5) |
式中:δtB为尾部电机平衡自身反扭力矩的平衡倾角;αB为飞行器平飞时的平衡迎角。
将表 1中的飞行器参数代入式(5),得到飞行器的倾转走廊曲线如图 2所示。
表 1 飞行器参数 Table 1 Aircraft parameters
| 参数 | 数值 |
| 巡航速度/(m·s-1) | 33 |
| 巡航迎角/(°) | 5 |
| 尾部电机平衡倾角/(°) | 10 |
| 升降舵平衡舵偏角/(°) | 6 |
| 飞行器质量/kg | 5 |
| 单发最大推力/N | 26 |
| 升力系数 | 0.178 8 |
| 阻力系数 | 0.044 1 |
| 机翼面积/m2 | 0.4 |
| 俯仰发动机力臂(前、后)/m | 0.4 |
| 发动机横侧力臂 | 0.18 |
| 气动俯仰力矩系数 | 0.00 086 75 |
| 平均气动弦长/m | 0.16 |
表选项
 |
| 图 2 飞行走廊曲线 Fig. 2 Curve of flight corridor |
| 图选项 |
2 横侧控制耦合与能耗优化 2.1 优化模型 常规固定翼布局飞行器的动力学模型中,定态飞行时横纵向运动是可以相互解耦,倾转旋翼无人机过渡过程中由于倾转角度变化,系统横纵向耦合严重,所以存在横向扰动时(侧风等),纵向运动参数也会受到影响。
本文所研究的常规气动布局三点式动力布局的倾转旋翼飞行器,在旋翼模式中,偏航通道由尾部舵机摆动控制,滚转通道由头部2个电机推力差控制,旋翼倾转角度不为零时,滚转控制会在偏航方向也产生力矩,为了平衡该力矩需要尾部舵机偏转控制,需要δt频繁改变。同时通过式(1)可得,纵向动力学模型中的横向变量只有δt,偏航通道控制改变,导致飞行器的航迹角和速度改变,从而造成飞行器高度和速度方向的振荡,降低过渡过程的飞行品质。因此减小过渡过程的控制耦合问题是倾转旋翼稳定过渡的关键点之一。
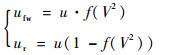
倾转旋翼飞行器是典型的过驱动系统,控制耦合严重,需要对控制信号进行控制分配来缓解执行机构耦合。目前常规的控制分配方式是根据速度将控制量分配给旋翼和固定翼模式控制器,固定翼模式的气动舵控制效率与速度的平方有关,所以可将分配关系写为
 | (6) |
式中:u、ufw和ur分别为总的控制信号、固定翼模式控制信号和旋翼模式控制信号。
本文根据典型的控制分配方式[14],设计了过渡过程控制分配方式:
 | (7) |
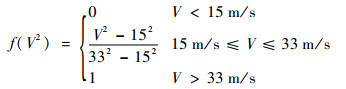
在过渡过程中,旋翼模式滚转控制引起头部2个电机的推力变化可以表示为
 | (8) |
式中:lhy为头部两电机中心到飞行器中心对称面的距离。
由于滚转和偏航的耦合关系会引起偏航方向的力矩:
 | (9) |
从式(9)可以看出,影响过渡过程横向耦合主要有2个因素:一是控制分配算法;二是倾转角度。
目前主要通过设计过渡过程的控制分配律来降低过渡过程的横向耦合。控制分配函数一般为速度或是倾转角度的函数,由于倾转角度和前飞速度的协调关系(如图 2所示),所以控制分配一定时,过渡过程横侧耦合大小只与倾转角度变化规律有关。
为了保证在整个倾转过渡过程中,滚转控制对偏航的影响最小,令
 | (10) |
式中:tf为终止时间。
根据其动力学模型优化问题为
 | (11) |
式中:Vc为巡航速度;C为常数。
考虑过渡过程中能量特性的影响,在目标函数中加入阻力做功项,即
 | (12) |
式中:w为权重系数。
2.2 遗传算法求解 Ta等[6-7]提出的运动剖面算法,在考虑执行机构动力学的基础上将倾转角度变化可以分成3个线性的任务段(如图 3所示)。
 |
| 图 3 运动剖面算法曲线[6-7] Fig. 3 Curves of motion profile algorithm[6-7] |
| 图选项 |
结束阶段过大的加速度会引起舵机系统的超调和振荡,从而引起速度和高度的振荡,该方案设计了三段式的倾转角方案以减小到达期望位置后的超调和振荡。由于该方案只考虑了舵机系统的影响,开始阶段和结束阶段直线的斜率是一致的,目前许多文献采用的倾转方案也是该方案。但是在考虑过渡过程中的耦合和阻力做功等情况下,需要对曲线的参数进行优化整定。
针对上述问题对曲线改进,在开始阶段和结束阶段采取三角函数倾转方案(如图 4所示),保证在拐点处导数连续性,使过渡过程更加平滑。
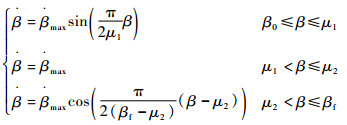 | (13) |
 |
| 图 4 改进运动剖面曲线 Fig. 4 Curves of improved motion profile |
| 图选项 |
需要整定的参数有3个,本文采用遗传算法来对参数进行优化整定。
遗传算法采用的编码方式为二进制编码,参数的精度为0.01;种群的初始化方式为随机初始化,筛选方式采用比例选择法;交叉概率为0.8,变异概率为0.01,交叉和变异位置均是随机选取。种群大小为80,最大迭代次数为100。终止方式为最大代数终止。适应度函数为
 | (14) |
遗传算法参数的范围如表 2所示。
表 2 初始约束条件 Table 2 Initial constraint condition
| 参数 | μ1 | μ2 |  |
| 数值 | [0°, 90°] | [μ1, 90°] | [0, 9](°)/s |
表选项
首先确定阻力项权重系数,由于过渡时间较短和过渡过程主要关心速度和高度的跟踪误差,因此需要确定合适的阻力项权重,本文的选取规则为
 | (15) |
取
 | (16) |
进行求解,得到最大代数种群,然后w的初始值为1,与最大代数种群适应度的倒数做对比,采用二分法得到符合式(15)的权重系数w=9.8×10-4。
将系数w代入式(14),采用遗传算法迭代后得到的种群平均适应度函数如图 5所示。从图 5可以看出,当迭代次数到50次时,种群平均适应度函数值已趋于稳定,取迭代过程中适应度最大个体为最终优化结果如表 3所示。
 |
| 图 5 种群平均适应度曲线 Fig. 5 Curve of population's mean fitness |
| 图选项 |
表 3 遗传算法优化后参数 Table 3 Genetic algorithm optimized parameters
| 参数 | μ1/(°) | μ2/(°) | /((°)·s-1) |
| 数值 | 45.15 | 90 | 9 |
表选项
根据优化参数得到过渡过程倾转角曲线和前飞速度曲线分别如图 6和图 7所示。图 7显示在优化结果中,μ2越靠近90°越好,在目标函数的构造的过程中并没有考虑舵机减速性能,因此,参数μ2需要进一步通过舵机的性能来确定。
 |
| 图 6 倾转角曲线 Fig. 6 Curve of tilt angle |
| 图选项 |
 |
| 图 7 前飞速度曲线 Fig. 7 Curve of forward velocity |
| 图选项 |
3 动态性能优化 采用文献[15]中的一舵机模型,来说明参数μ2的确定方法。根据舵机传递函数得到控制指令到角速度的传递函数:
 | (17) |
 | (18) |
将第2节得到的倾转方案曲线输入到舵机中,得到其时域响应如图 8所示。图 8只显示结束段的响应特性,1 s时达到结束位置。从图中可以看出,舵机系统无法很好地对指令进行跟踪,存在较大的超调。
 |
| 图 8 无减速段舵机输出 Fig. 8 Servo output in non-deceleration section |
| 图选项 |
取5组μ2值对舵机输出和减速段调节时间进行仿真,结果如图 9和图 10所示。从图 9和图 10可以看出,随着μ2接近终止位置,系统的超调量增大,但是减速段的时间越来变短,减速段越短,过渡时间越短,所以参数μ2需要在超调量和减速时间中进行权衡。
 |
| 图 9 不同参数μ2下舵机输出 Fig. 9 Servo output with different μ2 |
| 图选项 |
 |
| 图 10 调节时间与参数μ2关系 |
| 图选项 |
由于2个性能指标数值上的差异因此先对2个性能指标进行归一化处理:
 | (19) |
式中:g和f分别为最大超调量和减速段时间与参数μ2的函数关系;g′和f′为归一化后的指标函数,采用线性插值分别对2个指标函数进行拟合,然后通过求取2个性能指标函数的交点得到减速段参数:
 | (20) |
其中:w′为权重。当w′=1时,对超调量减小的关注更大;当w′ < 1时, 对减速时间减小的关注更大。
当w′=1时,其结果如图 11所示。得到的参数μ2=76.9°。
 |
| 图 11 加权相交法 Fig. 11 Weighted intersection algorithm |
| 图选项 |
4 对比分析 通过第2、3节优化结果可以得到最优倾转方案曲线(见图 12)和速度曲线(见图 13)。
 |
| 图 12 Curve of optimal tilt angle |
| 图选项 |
 |
| 图 13 最优速度曲线 Fig. 13 Curve of optimal velocity |
| 图选项 |
为了验证所提出的倾转角方案曲线的合理性,通过与匀速倾转的方案曲线和未优化的“S”形曲线进行对比。当过渡时间一定时3种方案的性能如表 4所示。从表中结果可以看出,当过渡时间一定时,最终优化结果在耦合影响和阻力做功两项指标都要明显高于匀速倾转和未优化的“S”形曲线,在超调量方面匀速倾转方案明显大于后面两种方案,未优化的“S”形曲线的超调量稍小于优化结果。
表 4 3种倾转曲线对比结果 Table 4 Result of three tilt curves caparsion
| 参数 | 匀速倾转 | 未优化“S”形曲线 | 本文结果 |
| 耦合大小 | 8.94 | 14.36 | 7.10 |
| 阻力做功 | 4 076.7 | 5 218.0 | 2 798.9 |
| 最大超调量 | 4.888 6 | 0.039 1 | 0.128 3 |
表选项
5 结论 1) 本文建立的考虑横侧耦合和能量损耗的优化模型得到了过渡过程中的最优倾转角曲线,进一步降低了过渡过程中横侧控制耦合的影响,提高了过渡过程的效率,减小了因横向耦合导致纵向运动参数的影响。
2) 本文在设计最优倾转角曲线时引入了舵机模型,通过不同倾转角曲线参数下的舵机动态响应,对倾转角曲线参数进一步进行优化,得到了兼顾减速时间和超调量的最优曲线参数。
3) 本文得到的最优倾转角曲线,对比分析后发现,该曲线能较好地兼顾耦合影响、能量损耗和过渡结束时的超调等多个指标,提高了倾转旋翼无人机过渡过程飞行品质。
参考文献
| [1] | 凡永华, 杨军, 赖水清, 等. 倾转旋翼机过渡段最优飞行控制系统设计[J]. 飞行力学, 2007, 25(1): 47-50. FAN Y H, YANG J, LAI S Q, et al. Design of an optinal flight control system for tiltrotor conversion[J]. Flight Dynamics, 2007, 25(1): 47-50. (in Chinese) |
| [2] | 夏青元, 徐锦法, 金开保. 倾转旋翼飞行器的建模和操纵分配策略[J]. 航空动力学报, 2013, 28(9): 2016-2028. XIA Q Y, XU J F, JIN K B. Tilt-rotor aircraft modeling and its manipulation assignment strategy[J]. Journal of Aerospace Power, 2013, 28(9): 2016-2028. (in Chinese) |
| [3] | 夏青元, 徐锦法, 张梁. 倾转旋翼飞行器无模型自适应姿态控制[J]. 系统工程与电子技术, 2013, 35(1): 146-151. XIA Q Y, XU J F, ZHANG L. Model-free adaptive attitude controller for a tilt-rotor aircraft[J]. Systems Engineering and Electronics, 2013, 35(1): 146-151. (in Chinese) |
| [4] | 陈嘉先, 梁波. 倾转旋翼无人机模态转换控制[J]. 战术导弹技术, 2015(2): 70-76. CHEN J X, LIANG B. Control of tilt rotor unmanned aerial vehicle during mode transition[J]. Tactical Missile Technology, 2015(2): 70-76. (in Chinese) |
| [5] | 严旭飞, 陈仁良. 倾转旋翼机动态倾转过渡过程的操纵策略优化[J]. 航空学报, 2017, 38(7): 54-64. YAN X F, CHEN R L. Control strategy optimization of dynamic conversion procedure of tilt-rotor aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(7): 54-64. (in Chinese) |
| [6] | TA D A, FANTONI I, LOZANO R. Modeling and control of a convertible mini-UAV[J]. IFAC Proceedings Volumes, 2011, 44(1): 1492-1497. |
| [7] | TA D A, FANTONI I, LOZANO R.Modeling and control of a tilt tri-rotor airplane[C]//American Control Conference.Piscataway, NJ: IEEE Press, 2012: 131-136. |
| [8] | 鲁麟宏, 付荣, 王勇, 等. 基于矫正广义走廊的电动倾转旋翼机模态转换[J]. 航空学报, 2018, 39(8): 121900. LU L H, FU R, WANG Y, et al. Mode conversion of electric tilt rotor aircraft based on corrected generalized corridor[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(8): 121900. (in Chinese) |
| [9] | YEO Y T, LIU H H.Transition control of a tilt-rotor VTOL UAV: AIAA-2008-1848[R].Reston, VA: AIAA, 2018. |
| [10] | 赖水清, 严峰, 徐珂. 倾转旋翼机过渡飞行阶段控制律设计研究[J]. 直升机技术, 2019(3): 52-55. LAI S Q, YAN F, XU K. Design and research of control law for tiltrotor in transition flight phase[J]. Helicopier Technique, 2019(3): 52-55. (in Chinese) |
| [11] | 张飞, 路平, 江涛, 等. 基于模糊控制的倾转三旋翼无人机过渡模式操纵策略研究[J]. 电光与控制, 2018, 25(4): 32-36. ZHANG F, LU P, JIANG T, et al. Transitional mode manipulation strategy of tilt tri-rotor UAVs based on fuzzy control[J]. Electronics Optics & Control, 2018, 25(4): 32-36. (in Chinese) |
| [12] | 曹芸芸.倾转旋翼飞行器飞行动力学数学建模方法研究[D].南京: 南京航空航天大学, 2012: 16-28. CAO Y Y.Research on mathematical modeling method for tilt rotor aircraft flight dynamics[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2012: 16-28(in Chinese). |
| [13] | 曹芸芸, 陈仁良. 倾转旋翼飞行器发动机短舱倾转角度-速度包线分析[J]. 航空动力学报, 2011, 26(10): 2174-2180. CAO Y Y, CHEN R L. Investigation on nacelle conversion envelope analysis method of tiltrotor aircraft[J]. Journal of Aerospace Power, 2011, 26(10): 2174-2180. (in Chinese) |
| [14] | FRANCESCO G D, D'AMATO E, MATTEI M.Incremental nonlinear dynamic inversion and control allocation for a tilt rotor UAV: AIAA-2014-0963[R].Reston: AIAA, 2014. |
| [15] | 闫秋红, 垂直起降倾转四旋翼机过渡阶段控制问题研究[D].哈尔滨: 哈尔滨工业大学, 2015: 21-24. YAN Q H.Control system design on the transition stage of quad tiltrotor aircraft[D].Harbin: Harbin Institute of Technology, 2015: 21-24(in Chinese). |
