 |
| 图 1 DEM颗粒模型示意图Fig. 1 Sketch of DEM model of particle |
| 图选项 |
用连接颗粒中心和接触点的矢量表示力链[11],矢量大小由线条的粗细表示,与接触点处接触力Fij的大小成正比.单个颗粒i的运动控制方程为
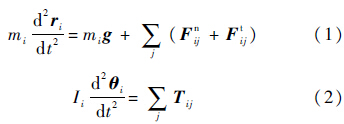
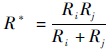
式中:ri和θi分别为颗粒的位移与角位移;g为重力加速度.式(1)和式(2)中,接触力主要有3种计算模型[15]:“线性接触力模型”、“Hertz-Mindlin模型”和“无滑移Hertz-Mindlin模型”.根据Alberto等[17]的研究结果,密集颗粒运动中的接触力采用“无滑移Hertz-Mindlin模型”不但能保证计算精度,而且可以避免过多的计算量.因此,接触力采用“无滑移Hertz-Mindlin模型”计算,具体如下:
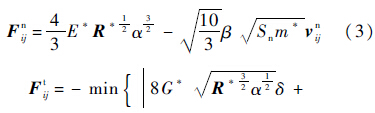
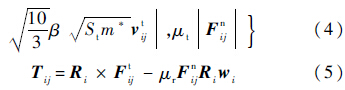
式中:颗粒等效半径
 ;等效弹性模量
;等效弹性模量 等效质量
等效质量 等效切向模量
等效切向模量 ;法向刚度Sn=2E*(R*α)0.5,切向刚度St=8G*(R*α)0.5;修正系数
;法向刚度Sn=2E*(R*α)0.5,切向刚度St=8G*(R*α)0.5;修正系数 为单位角速度矢量;α和δ分别为颗粒之间的法向、切向重叠量;vijn和tijn分别为颗粒之间相对速度的法向、切向分量;μr为滚动摩擦系数;μt为滑动摩擦系数.通过时间差分法可以对式(1)和式(2)进行求解[15, 16, 17, 18],DEM基本算法不再赘述.模型中的参数变量为:颗粒的质量m、弹性模量E、泊松比ξ、恢复系数e、滚动摩擦系数μr和滑动摩擦系数μt.1.2 颗粒堆积过程颗粒为Nakashima等[4]实验中采用的石英砂,从直径为d的出料口生成,在重力作用下堆积至直径为D的圆形底板上.DEM具体参数取值如表 1所示,其中:颗粒密度、弹性模量等参数采用文献[4]测量值;为形成稳定的锥形颗粒堆,模型中μr-pb及μs-pb取值均大于测量值,显然,增大μr-pb和μs-pb的取值不会对颗粒堆安息角及内部接触力造成影响.表 1 模型参数 Table 1 Parameters of model
为单位角速度矢量;α和δ分别为颗粒之间的法向、切向重叠量;vijn和tijn分别为颗粒之间相对速度的法向、切向分量;μr为滚动摩擦系数;μt为滑动摩擦系数.通过时间差分法可以对式(1)和式(2)进行求解[15, 16, 17, 18],DEM基本算法不再赘述.模型中的参数变量为:颗粒的质量m、弹性模量E、泊松比ξ、恢复系数e、滚动摩擦系数μr和滑动摩擦系数μt.1.2 颗粒堆积过程颗粒为Nakashima等[4]实验中采用的石英砂,从直径为d的出料口生成,在重力作用下堆积至直径为D的圆形底板上.DEM具体参数取值如表 1所示,其中:颗粒密度、弹性模量等参数采用文献[4]测量值;为形成稳定的锥形颗粒堆,模型中μr-pb及μs-pb取值均大于测量值,显然,增大μr-pb和μs-pb的取值不会对颗粒堆安息角及内部接触力造成影响.表 1 模型参数 Table 1 Parameters of model| 参数 | 数值 |
| 颗粒半径R/mm | 6 |
| 颗粒密度ρ/(kg·m-3) | 2 090 |
| 颗粒-颗粒滑动摩擦系数μt-pp | 0.154 |
| 颗粒-颗粒滚动摩擦系数μr-pp/mm | 0.025 |
| 颗粒弹性模量Ep/MPa | 57 |
| 颗粒-颗粒恢复系数epp | 0.5 |
| 颗粒-底板恢复系数epb | 0.3 |
| 颗粒泊松比ξp | 0.25 |
| 底板泊松比ξb | 0.3 |
| 底板弹性模量Eb/MPa | 2 000 |
| 颗粒-底板滚动摩擦系数μr-pb/mm | 0.3 |
| 颗粒-底板滑动摩擦系数μs-pb | 1 |
| 底板直径D/mm | 700 |
| 出料口直径d/mm | 50 |
| 时间步长Δt/μs | 43.4 |
表选项
颗粒堆积方式有“落雨式”和“点源式”两种[4],模型中采用与多数自然现象较接近的“点源式”堆积方式.如图 2(a)所示,颗粒从出料口随机生成,受重力作用降落至底板,从底板中心开始堆积并逐渐向边缘扩展;如图 2(b)所示,颗粒扩展至底板边缘后堆积进入饱和状态,继续下落的颗粒将从底板的边缘滚落,随后关闭出料口直至形成稳定的颗粒堆,H为颗粒堆的高度.颗粒堆积过程中,出料口高度随颗粒堆积高度逐渐上移,以减轻颗粒降落时对安息角的冲击.颗粒堆安息角为

 |
| 图 2 “点源式”颗粒堆积过程Fig. 2 Particle accumulation of “point source type” |
| 图选项 |
2 结果及讨论首先分析了地球重力场中(g=g0)颗粒堆的力链结构.然后,模拟了g为0.167g0(月球重力)、0.444g0(火星重力)和2g0时颗粒堆的安息角及接触力.2.1 颗粒堆的力链结构图 3为地球重力场中颗粒堆截面上接触力合力的力链结构.由图可知,与光弹性实验观测结果[13]相似:即颗粒力链互相交接构成非均匀的力链网络,支撑颗粒堆保持稳定;力链强度沿着重力方向逐渐变强,但是力链网络的结构具有随机性,且强、弱力链会交替出现;底部接触力从颗粒堆的中心向边缘逐渐变弱,但是最大接触力不在中心位置,即存在实验中发现的“底部应力凹陷”和“拱桥桥应”[11].重复模拟颗粒堆的安息角均约为23°,但是微观力链结构具有不可重复性.
 |
| 图 3 颗粒堆截面上的力链Fig. 3 Force chain of granular pile in cross section |
| 图选项 |
图 4为颗粒堆内接触力Fij的概率密度函数P及累积分布函数(Cumulative Function Probability,CFP),图中,接触力的平均值为Fav.由图可知,接触力近似为对数正态分布,并且65%的接触力低于平均值,为弱力链,而大于平均值的接触力呈指数递减.结合图 3可知,颗粒堆内弱力链较多,是由于少数强力链贯穿于整个力链网络,并支持了颗粒堆大部分重量导致的.Thornton和Antony[14]研究表明受压颗粒系统的接触力也符合这一分布规律,可以推测,颗粒系统内强、弱力链的比例不受外载荷的影响,是颗粒系统的固有性质.
 |
| 图 4 接触力的概率分布Fig. 4 Probability distribution of contact-force |
| 图选项 |
设η为接触点切向力与法向力的比值,即η=Fijt/Fijn.图 5为η的概率分布,由图可知:在0<η<μt-pp区域,P(η)为均匀分布;η=0.154=μt-pp处,P(η)出现脉冲峰值.η的均匀分布可能是由颗粒堆积过程的随机性导致的,这一特征与受压颗粒系统相同.当η=μt-pp时,表示接触点处于临界滑移状态,单轴实验中受压的颗粒系统约50%的接触点处于临界滑移[8],而图 5表明颗粒堆内约70%的接触点处于临界滑移状态.根据颗粒的堆积过程可以推断:由于安息角是颗粒堆的临界稳定角,而颗粒堆是由颗粒沿着安息角一层一层堆积而形成,因此,与单轴实验的颗粒系统相比,颗粒堆内部有更多接触点处于临界滑移状态.
 |
| 图 5 η的概率分布Fig. 5 Probability distribution of η |
| 图选项 |
2.2 不同重力场中的颗粒堆图 6为月球重力及火星重力作用下的颗粒堆的力链结构.虽然太阳系中类地星球的重力均小于地球[19, 20],作为概念性研究,图中增加了g=2g0的颗粒堆作为对比.由图可知,各重力场中颗粒堆的力链强度随着重力的增加而增大,但是几何轮廓与地球重力场中的相同,安息角均为23°,即安息角不受重力大小的影响.
 |
| 图 6 不同重力场中颗粒堆的力链Fig. 6 Force chains of granular piles under variable g |
| 图选项 |
图 7为不同重力场中颗粒堆接触力概率分布的对比.如图 7(a)所示,接触力随着重力的增大而增大,这是因为颗粒重力增加后,力链网络要形成力学平衡,接触力也必然增大.图 7(b)为无量纲化之后的接触力分布规律,图中,接触力除以颗粒重力mg进行无量纲化,由图可知,无量纲化之后接触力的概率密度函数高度相符,即接触力的概率密度函数与重力成比例关系.进一步分析η的分布规律,如图 7(c)所示,不同重力作用下,各颗粒堆η的分布规律一致,即接触点切向力与法向力比值的分布规律不受重力的影响.Radjai等[12]研究发现不同尺寸规模颗粒系统之间的接触力概率分布具有相似性,由以上分析可知,不同重力场中颗粒堆的接触力概率分布也具有相似性.
 |
| 图 7 各重力场中颗粒堆的接触力概率分布Fig. 7 Probability distributions of contact-force of granular piles under variable g |
| 图选项 |
颗粒的粒径级配、粒径大小和粗糙度均会影响颗粒堆的接触力,从而改变安息角.表 2为6种不同物性参数的样本颗粒,其中,样本S1和S4的颗粒半径符合正态分布规律,且最大半径与最小半径之比为1.2,表中R表示样本颗粒的平均半径.根据DEM模型分别模拟了g为0.167g0,0.444g0,g0和2g0时各样本颗粒的堆积过程,安息角结果如表 3所示,由表可知,虽然各样本颗粒之间的安息角存在差异,但对于同一样本颗粒,4种重力下安息角的标准偏差均小于0.5°,表明各样本颗粒的安息角均不受重力大小的影响.
表 2 样本颗粒物性参数 Table 2 Physical parameters of sample particles
| 颗粒样本S | R/mm | μt-pp | μr-pp/mm |
| S1 | 6 | 0.254 | 0.05 |
| S2 | 6 | 0.254 | 0.1 |
| S3 | 6 | 0.5 | 0.2 |
| S4 | 4 | 0.254 | 0.05 |
| S5 | 4 | 0.254 | 0.1 |
| S6 | 4 | 0.5 | 0.2 |
表选项
表 3 各样本颗粒堆的安息角 Table 3 Angles of repose of all samples( )
| 颗粒样本S | α | 标准偏差 | |||
| 0.1g0 | 0.4g0 | g0 | 2g0 | ||
| S1 | 23.8 | 24.5 | 24.1 | 24.0 | 0.06 |
| S2 | 29.7 | 29.8 | 30.1 | 29.5 | 0.06 |
| S3 | 33.3 | 33.2 | 33.7 | 33.0 | 0.1 |
| S4 | 24.3 | 25.0 | 24.8 | 24.6 | 0.1 |
| S5 | 29.4 | 30.0 | 30.1 | 30.9 | 0.38 |
| S6 | 35.5 | 35.8 | 36.2 | 36.0 | 0.07 |
表选项
图 8为各样本颗粒堆在不同重力场中的接触力概率分布,图中,接触力分别除以各样本颗粒的重力进行无量纲化.由图可知,各样本颗粒堆的接触力均近似为对数正态分布,并且,对于同一样本颗粒堆,接触力无量纲化之后的概率密度函数高度相符.另外,各样本颗粒堆的η的概率分布均为:η=μt-pp的接触点占约70%,而其余接触点的η在[0,μt-pp)之间均匀分布,而重力与η的分布规律无关,文中不再一一列出.可见,不同重力场中颗粒堆的接触力分布规律具有相似性,这一特征不受颗粒粒径级配、粒径大小和粗糙度的影响.
 |
| 图 8 各样本颗粒堆的接触力概率分布Fig. 8 Probability distributions of contact-force within granular piles for all samples |
| 图选项 |
2.3 讨 论颗粒堆由力链网络支撑而保持平衡,宏观呈现的倾斜角即为安息角.不同重力场中,颗粒堆力链的微观结构存在随机性差异,但是接触力的统计分布规律具有相似性,即接触力的强度随重力成比例增长,且接触点的η分布规律不受重力大小的影响.根据经典力学原理可知,力链的强度成比例增大后不改变力链网络节点的力学平衡,虽然颗粒堆积后的微观结构存在差异,但是整体结构的稳定性不变,即安息角不受影响.文中研究结果与Nakashima等[4, 19]一致,即安息角不受重力大小的影响.近期,Horgan等[6, 7]以安息角随着重力减小而增大为设想,对火星极地表面的沙丘地貌和地质结构进行了研究,但是,如果能进一步实验证明安息角与重力无关,则Horgan等[6, 7]及其他****的相关研究结果需要重新评价.3 结 论1) 散体颗粒堆积后,颗粒之间的接触力形成力链,力链结构呈非规则的网络状,且强、弱力链相互交替分布.其中,接触力强度呈对数正态分布,约65%接触力低于平均值,大于平均值的强力链呈指数递减.接触点中约70%处于临界滑移状态,其余接触点的切向力与法向力比值η在[0,μt-pp)区间为均匀分布.2) 不同重力场中,散体颗粒堆接触力的概率分布具有相似性,即接触力相对颗粒重力无量刚化后的概率密度函数高度相符,且接触点η的概率分布不受重力大小的影响.接触力分布规律的相似性特征不受颗粒粒径大小、粒径级配和粗糙度的影响.颗粒堆的微观结构存在随机性差异,但宏观安息角与重力的大小无关.
参考文献
| [1] | Brucks A, Arndt T, Ottino J M, et al.Behavior of flowing granular materials under variable g[J].Physical Review E, 2007, 75(3):032301. |
| Click to display the text | |
| [2] | Hofmeister P G, Blum J, Heiβelmann D.The flow of granular matter under reduced gravity conditions[J].American Institute of Physics Conference Proceedings, 2009, 1145:71-74. |
| Click to display the text | |
| [3] | Kleinhans M G, Markies H, Postema F N.Static and dynamic angles of repose in loose granular materials under reduced gravity[J].Journal of Geophysical Research, 2011, 116:E11004. |
| Click to display the text | |
| [4] | Nakashima H, Shioji Y, Kobayashi T, et al.Determining the angle of repose of sand under low-gravity conditions using discrete element method[J].Journal of Terramechanics, 2011, 48(1):17-26. |
| Click to display the text | |
| [5] | Atwood-Stone C, McEwen A.Avalanche slope angles in low-gravity environments from active Martian sand dunes[J].Geophysical Research Letters, 2013, 40(12):2929-2934. |
| Click to display the text | |
| [6] | Horganical H H N, Bell J F.Seasonally active slipface avalanches in the north polar sand sea of Mars:Evidence for a wind related origin[J].Geophysical Research Letters, 2012, 39(9):L09201. |
| Click to display the text | |
| [7] | Sullivan R, Anderson R, Biesiadecki J, et al.Cohesions, friction angles, and other physical properties of Martian regolith from Mars exploration rover wheel trenches and wheel scuffs[J].Journal of Geophysical Research, 2011, 116:E02006. |
| Click to display the text | |
| [8] | Wong J Y.Predicting the performance of rigid rover wheels on extraterrestrial surfaces based on test results obtained on earth[J].Journal of Terramechanics, 2012, 49(1):49-61. |
| Click to display the text | |
| [9] | 崔燚, 李雯, 王浚, 等.梯形齿车轮月面牵引性能的离散分析[J].北京航空航天大学学报, 2010, 36(3):253-256. Cui Y, Li W, Wang J, et al.Numerical analysis on traction performance of trapezia lugged wheel by distinct element method[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(3):253-256(in Chinese). |
| Cited By in Cnki (4) | Click to display the text | |
| [10] | Guo Z G, Chen X L, Liu H F, et al.Theoretical and experimental investigation on angle of repose of biomass-coal blends[J].Fuel, 2014, 116:131-139. |
| Click to display the text | |
| [11] | Matuttis H G, Luding S, Herrmann H J.Discrete element simulation of dense packing and heaps made of spherical and non-spherical particles[J].Powder Technology, 2000, 109(1):278-292. |
| Click to display the text | |
| [12] | Radjai F, Jean M, Moreau J J, et al.Force distributions in dense two-dimensional granular systems[J].Physical Review Letters, 1996, 77(2):274-277. |
| Click to display the text | |
| [13] | Zhang L, Wang Y J, Zhang J.Force-chain distributions in granular system[J].Physical Review E, 2014, 89(1):012203. |
| Click to display the text | |
| [14] | Thornton C, Antony S J.Quasi-static shear deformation of a soft particle system[J].Powder Technology, 2000, 109(1-3):179-191. |
| Click to display the text | |
| [15] | Chung Y C, Liao H H, Hsiau S S.Convection behavior of non-spherical particles in a vibrating bed:Discrete element modeling and experimental validation[J].Powder Technology, 2013, 237:53-66. |
| Click to display the text | |
| [16] | 高峰, 李雯, 孙刚, 等.模拟月壤可行驶性的离散元数值分析[J].北京航空航天大学学报, 2009, 35(4):501-504. Gao F, Li W, Sun G, et al.Numerical analysis on travelability of lunar soil simulant by means of distinct element method[J].Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(4):501-504(in Chinese). |
| Cited By in Cnki (13) | Click to display the text | |
| [17] | Alberto D R, Francesco P D M.Comparison of contact-force models for the simulation of collisions in DEM-based granular flow codes[J].Chemical Engineering Science, 2004, 59(13):525-541. |
| Click to display the text | |
| [18] | Alizadeh E, Bertrand F, Chaouki J.Comparision of DEM results and Lagrangian experimental data for the flow and mixing of granules in a rotating drum[J].AIChE Journal, 2014, 60(1):60-75. |
| Click to display the text | |
| [19] | Blum J.Astrophysical microgravity experiments with dust particles[J].Microgravity Science Technology, 2010, 22(4):517-527. |
| Click to display the text | |
| [20] | Walton O R, Pamela C, Gill K S.Effects of gravity on cohesive of fine powders:Implications for processing Lunar regolith[J].Granular Matter, 2007, 9(5):353-363. |
| Click to display the text |
