国内外有关喷涂机器人的研究有很多.KUKA,ABB,Fanuc,motoman的喷涂机器人以关节式6R型机器人为主[4, 5, 6, 7],适合产品的表面喷涂,无法应用于管道内部的喷涂.北京机械工业自动化研究所研制的大型龙门式喷涂机器人,适用于大型或重型结构车体的喷涂作业,但不适合对管道内壁喷涂.Okamoto等人开发研制的管道机器人[8],利用首尾两端管内流体形成的压力差作为驱动力向前运动,已经应用于管道检测;浙江大学研制的新型蠕动式气动微型管道机器人[9],采用压缩空气作为动力源,实现机器人在管道内的运动;Chen等人研制的S型管道机器人成本高,末端负载小[10];Liu等人研究了针对温室喷涂的机器人,不适用于管道喷涂[11].上述机器人均无法适用于大型管道喷涂,特别是异型管道.栾振兴研究的管道喷涂机器人,虽然可以应用于大型管道喷涂,但是该机器人自由度相对较少,不具有灵活性[12],不能适用于异型管道.
本文针对大型管道内壁的喷涂,设计了一种管道喷涂机器人,该机器人可以适用于大型管道、异型管道的喷涂,建立了的机器人模型,给出了位姿调整算法,试验验证了该设计和调姿算法的正确性.
1 喷涂机器人1.1 异型管道在工业制造领域中,大型管道为防止存储、运输和使用过程中的氧化腐蚀,基本上都要在成型后进行喷涂处理[13].异型管道是大型管道中比较典型常见的一种,它一般都是由不规则的形状拼接而成,如横断面轮廓非圆形、变壁厚,沿长度方向变直径和变壁厚,断面对称和不对称等[14].这种管道比普通管道更能适应应用条件的特殊性,广泛应用于航空、造船、矿山机械、锅炉、水利系统等领域[15, 16].
本文设计的大型管道包括异型管道的喷涂机器人.适用但不止于:长管道(长度大于10 m)、半封闭、等/变截面、工作空间狭小的管道.
1.2 机器人结构大型管道由于尺寸大、重量重的特点,在喷涂时保持固定,因此机器人需具有移动、伸缩、位姿调整、旋转等功能.喷涂时,机器人移动到管道口前方进行初定位,位姿调整功能依据管道的位姿调节自身的位姿使喷枪轴线与管道轴线重合,通过伸缩功能将喷枪伸入管道内部绕喷枪轴线旋转进行喷涂.
喷涂机器人由支撑平台和机械臂组成,如图 1所示.喷涂时管道固定不动,机器人移动到初始位置固定后调整喷枪的位姿进行喷涂.固定喷枪的装置如图 2所示,它由1个旋转和1个移动轴组成,通过安装孔和悬臂连接,采用空气喷涂方式[17, 18].支撑平台采用可移动的滚轮实现机器人的初始定位,采用四脚支撑结构增加机器人喷涂时的稳定性;机器人移动到初始位置后,调整支撑平台支腿长度、悬臂的转角和横移实现喷枪旋转轴与管道轴线重合.
 |
| 图 1 喷涂机器人Fig. 1 Spraying robot |
| 图选项 |
 |
| 图 2 喷枪装置Fig. 2 Spray gun device |
| 图选项 |
支撑平台由4个可伸缩(分别标注为1~4号脚)的支脚、4个滚轮和平台组成.通过滚轮的移动实现初始位置的调整,通过支腿高度实现支撑平台的高度和俯仰角的调整,如图 3所示.
 |
| 图 3 喷涂机器人运动简图Fig. 3 Kinematic sketch of spraying robot |
| 图选项 |
机械臂由2个移动关节(悬臂的伸长和横移机构的移动)和1个旋转关节(旋转机构)组成,在机械臂的末端是固定喷枪的装置,如图 3所示.悬臂旋转的旋转关节和支撑平台一起实现悬臂位姿的调整.悬臂伸缩的移动关节实现沿管道轴线的运动.
1.3 机器人建模喷涂机器人是一个串并联混合机器人.建模时根据机械特点分为支撑平台和机械臂两部分.支撑平台即并联部分模型如图 4(a)所示.这里只考虑位姿调整部分.
 |
| 图 4 支撑平台坐标系Fig. 4 Coordinate system of support platform |
| 图选项 |
建立如图 4(b)坐标系,O0X0Y0Z0为世界坐标系;O1X1Y1Z1为支腿坐标系,原点O1是旋转关节旋转中心(如图 3)在X1O1Y1平面的投影点;O2X2Y2Z2为支撑平台坐标系,原点O2是机械臂在支撑平台连接处的中心点.通过调整支腿的长度可以调整坐标系O2X2Y2Z2相对于O1X1Y1Z1的位姿,即调整绕X2和Y2轴的旋转角度θ1,θ2和Z2轴的移动距离,O1O2初始距离为d2.
支撑平台数学模型建立采用了等效的数学方法:由于调整支撑平台位姿时,自由度存在耦合,故将4个支腿的伸长量调整坐标系O2X2Y2Z2姿态等效于X2和Y2轴的旋转和Z2轴的移动关节调整坐标系O2X2Y2Z2姿态.
机械臂即串联部分如图 3所示,结构如图 5(a)所示.根据D-H参数建模法建立的坐标系如图 5(b)所示,表 1为该模型的D-H参数表.
 |
| 图 5 机械臂连杆坐标系Fig. 5 Coordinate system of connecting rod of mechanical arm |
| 图选项 |
表 1 D-H坐标系参数表Table 1 Parameter table of D-H coordinate system
| i | a(i-1) | α(i-1) | di | θi |
| 3 | 0 | 0 | d3 | θ3 |
| 4 | 0 | -90 | d4 | -90 |
| 5 | a4 | -90 | d5 | 0 |
表选项
O3X3Y3Z3为旋转机构坐标系,原点O3是旋转机构旋转中心线和横移机构移动轴的交点;O4X4Y4Z4为横移机构坐标系,初始状态下原点O4和坐标系O3X3Y3Z3原点重合;O5X5Y5Z5为喷枪装置坐标系,原点O5是喷枪旋转轴线和喷枪平面的交点;点O是X4轴和Z5轴的交点.机械臂通过1个旋转关节和2个移动关节调整末端喷枪的位姿.图 5(b)中,按照D-H建模法标出相应的位置关系;在表 1中,d4,d5,θ3都是变量;d5初始值为S,S为O到点O5的初始距离;d3和a4都是机器人固有参数.
2 位姿求解2.1 支撑平台从坐标系O1X1Y1Z1到坐标系O2X2Y2Z2为支撑平台部分,坐标系O1X1Y1Z1到坐标系O2X2Y2Z2的齐次矩阵:

n 1,o 1,a 1,p 1是在坐标系O1X1Y1Z1中坐标系O2X2Y2Z2法线矢量、方向矢量、接近矢量、原点矢量.
4个支腿顶部在O1X1Y1Z1坐标系中的坐标为P1(x1,y1,z1+d2),P2(x2,y2,z2+d2),P3(x3,y3,z3+d2),P4(x4,y4,z4+d2),其中z1,z2,z3,z4为支腿伸长量,d2为支腿初始长度,如图 3所示.
机器人位姿调整过程中,支腿间距的变化量相对较小,忽略不计.支腿的调节只改变z1,z2,z3,z4的值,调节z1,z2,z3,z4的值等效于调整绕X2和Y2轴的旋转角度θ1,θ2和Z2轴的移动距离.
x1,y1,x2,y2,x3,y3,x4,y4均为已知.有如下关系:
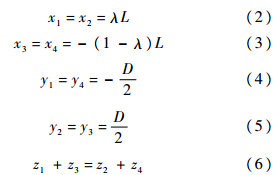
如图 3所示,L表示2和3号腿距离,D表示3和4号腿距离,λ表示旋转中心到1和2号腿连线距离和L的比值(0<λ<1).根据几何关系,可得
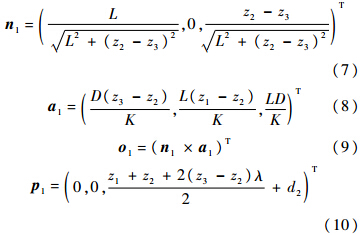
其中

2.2 机 械 臂从坐标系O2X2Y2Z2到坐标系O5X5Y5Z5为机械臂部分,根据表 1的连杆参数可得

喷枪坐标系相对于世界坐标系转换矩阵为

其中当四脚支撑平台固定后0 T 1为已知量、0 T 5为测量量,假设:
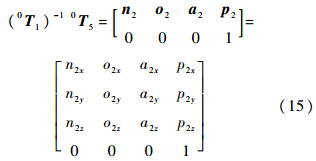
式中 n 2,o 2,a 2,p 2分别为(0 T 1)-1 0 T 5法线、方向矢量、接近矢量、原点矢量的转置.
由式(14)可得:坐标系O1X1Y1Z1到坐标系O5X5Y5Z5转换矩阵1 T 5为

坐标系O2X2Y2Z2到坐标系O5X5Y5Z5的转换矩阵2 T 5为

将式(15)代入式(16)可得1 T 5,1 T 5通过1 T 2确定坐标系O5X5Y5Z5的法向矢量和原点矢量推出:
假设:
式中 n 3,o 3,a 3,p 3分别为(1 T 2)-1(0 T 1)-1 0 T 5法线矢量、方向矢量、接近矢量、原点矢量的转置.
联立式(11)~式(13)、式(17)~式(19)可确定其他变量值为
3 位姿调整喷涂时机器人目标位姿是使喷枪旋转轴与管道的轴线重合,其中管道轴线位姿固定.喷涂时机器人移动到一个合适位置,实现初定位.由于机器人自身定位误差和坐标系统标定误差的存在,机器人初定位难以达到要求.因此,机器人初定位后,利用激光跟踪仪进行测量,得到喷枪旋转轴线和管道轴线的位姿偏差,并对其进行调整,达到喷枪旋转轴线和管道轴线重合.
机器人位姿调整首先对悬臂和管道轴线的位姿测量.在机器人和管道上选取标记点,测出标记点的坐标,获得喷枪和管道轴线的位姿.
根据机器人和管道的相对位置获得各个关节的调姿量,调整机器人姿态实现喷枪旋转中心和管道轴线的重合.测量调姿流程如图 6所示.
 |
| 图 6 调姿流程图Fig. 6 Flow chart of adjusting position |
| 图选项 |
1) 计算支腿坐标系相对于世界坐标系的位姿矩阵0 T 1.
将机器人移动到管道口,固定机器人;4条支腿长度相同,为d2,支腿伸长量z1,z2,z3,z4均为0,θ3=0.测量L,D,d2,d3,a4,d6,S的值,并计算出λ的值.
在O5Y5Z5平面上选取3点,这3点位于悬臂上,如图 7所示,Pb1和Pb2是Y5轴上的两点,Pb1Pb3 与Z5轴平行,用激光跟踪仪标定这3个点在坐标系O0X0Y0Z0中的坐标(选取激光跟踪仪测量坐标系为世界坐标系).
 |
| 图 7 悬臂测试点Fig. 7 Test points of cantilever |
| 图选项 |
由两点坐标可以确定两点连线的方向向量可知:Pb1和Pb2可确定Y5在坐标系O0X0Y0Z0中的方向向量,Pb3和Pb1可确定Z5在坐标系O0X0Y0Z0中的方向向量,根据右手定则可确定X5在坐标系O0X0Y0Z0中的方向向量,Pb1Pb2的中点坐标为坐标系O5X5Y5Z5的原点矢量,以上可推出初始位姿下喷枪坐标系相对于世界坐标系的转换矩阵0 T *5:

将机器人初始状态下已知量代入式(1)、式(11)~式(13)中,求出1 T 2,2 T 3,3 T 4,4 T 5,结合式(21)的0 T *5,代入式(14)可求出0 T 1,即跟踪仪和机器人位姿矩阵(0 T 1在调姿过程中值不变).
2) 测量管道前端面中心位姿0 T t.
一般情况下,管道前端面和管道的轴线垂直,如图 8所示.在管道前端圆上选取3个点Pa1,Pa2,Pa3,理论上3个点只要保证不在一条直线上即可,为了解算方便,选取管道前端面竖直方向上的极限点Pa1和Pa3和水平方向上一个极限点Pa2.Pa1Pa3中点为Pa.以Pa为原点建立管道坐标系OtXtYtZt,Zt与Pa3Pa1重合,Yt和管道轴线重合,Xt与Pa2Pa重合.用激光跟踪仪标定管道前端面3个点坐标来获得管道坐标系OtXtYtZt.
 |
| 图 8 管道前端面中心坐标系Fig. 8 Coordinate system of the front face center of pipe |
| 图选项 |
由两点坐标可以确定两点连线的方向向量可知:Pa3和Pa1确定Zt轴在坐标系O0X0Y0Z0中的方向向量,Pa2和Pa确定Xt轴在坐标系O0X0Y0Z0 中的方向向量,根据右手螺旋定则可以确定Yt在坐标系O0X0Y0Z0中的方向向量,即管道轴线在坐标系O0X0Y0Z0中的方向向量.
Pa在坐标系O0X0Y0Z0中坐标为

得出位姿矩阵为

调整时机器人由初始位置调整到管道前端面中心位姿.调整后机器人末端点的位姿为0 T t,即0 T 5=0 T t.
3) 计算关节变量调整值.
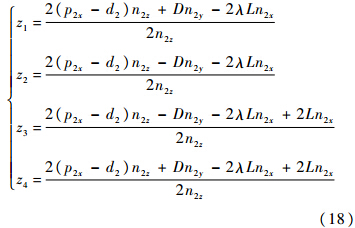
由(0 T 1)-1 0 T 5可求得 n 2,o 2,a 2,p 2的值,式(18)可求得支腿伸长量z1,z2,z3,z4的值.通过(1 T 2)-1(0 T 1)-1 0 T 5的值可计算出 n 3,o 3,a 3,p 3,式(20)可求θ3,d4,d5的值.该关节值减去初始关节值即为关节调整量.
由z1,z2,z3,z4的值调节相应支腿的高度使喷枪的旋转轴与管道轴同平面,即和支撑平台平面平行.由θ3的值调节旋转盘使喷枪旋转轴与管道轴线平行.由d4的值调节横移平台使喷枪轴与管道轴重合.
由(d5-S)的值作参考,伸缩悬臂,将喷枪按指定的速度伸入管道.如果出现机械误差等[19, 20],可按照流程图修正步骤,重新计算关节调整量调整机器人位姿.
4 试 验采用VC实现了位姿调整算法,把测量量输入到所编写的程序中,获得各关节的调节量,如图 9所示.设计完成的管道喷涂机器人见图 10.
 |
| 图 9 计算结果示例Fig. 9 Sample of the results |
| 图选项 |
 |
| 图 10 调姿后的喷涂机器人Fig. 10 Spraying robot after adjusting position |
| 图选项 |
在某大型制造工厂进行了喷涂试验.把测量数据输入到位姿调整程序中,经过调整之后进行喷涂.涂层厚度在0.45~0.65 mm范围内,均匀性保证在±50 μm,漆膜表面符合Q/6sZ 1713-2005相关要求.经测量误差在1 mm以内,满足实际工程需求.
试验验证了该机器人的设计合理性和高效性以及调姿算法的正确性、实用性.
5 结 论1) 本文针对大型异型管道喷涂的需求,设计了一种串并联的管道喷涂机器人;采用几何和D-H建模相结合的方法对机器人进行建模.研制的机器人在工厂进行了测试,测试结果表明喷涂机器人结构合理.
2) 给出了位姿调整算法.位姿调整算法在研制的机器人上进行应用,缩短了调整时间,提高了工作效率.
参考文献
| [1] | 陈雁,邵君奕, 张传清,等.复杂管道喷涂系统研制[J].机械设计与制造,2009(11):1-3. Chen Y,Shao J Y,Zhang C Q,et al.Development of spraying system for complex duct[J].Mechanical Design and Manufacturing,2009(11):1-3(in Chinese). |
| Cited By in Cnki (1) | Click to display the text | |
| [2] | 曾勇. 大型复杂自由曲面的喷涂机器人喷枪轨迹优化研究[D].兰州:兰州理工大学,2011. Zeng Y.The research of the spray gun's trajectory optimization of spraying robot which sprays large complex free surface[D].Lanzhou:Lanzhou University of Technology,2011(in Chinese). |
| Cited By in Cnki (1) | |
| [3] | Cho C S, Kim J D,Lee S G,et al.A study on automated mobile painting robot with permanent magnet wheels for outer plate of ship[J].Robotics(ISR),2013,44:1-4. |
| Click to display the text | |
| [4] | 王站中,张大卫, 安艳松,等.非球形手腕6R串联型喷涂机器人逆运动学分析[J].天津大学学报,2007,40(6):665-670. Wang Z Z,Zhang D W,An Y S,et al.Inverse kinematics analysis of the 6R serial spraying manipulator with non-spherical wrist[J].Journal of Tianjin Univerity,2007,40(6):665-670(in Chinese). |
| Cited By in Cnki (17) | Click to display the text | |
| [5] | 李抗战,李培哲. FANUC机器人喷涂系统在重卡驾驶室上的应用[C]//第十四届全国涂料涂装技术信息交流会暨交通用涂料涂装技术研讨会,2011,5:105-124. Li K Z,Li P Z.The application of FANUC robotics spraying system in heavy card bridge[C]//The 14th National Paint Coating Technical Information Exchange and Traffic with Paint Coating Technology Seminar,2011,5:105-124(in Chinese). |
| Cited By in Cnki | |
| [6] | 张微微. 6-DOF串联机器人动力学性能指标分析与仿真[D].秦皇岛:燕山大学,2007. Zhang W W.6-DOF serial robot dynamics performance index analysis and simulation[D].Qinhuangdao:Yanshan University,2007(in Chinese). |
| Cited By in Cnki (8) | |
| [7] | Alessandro G,Renato V, Daniele P,et al.Automatic path and trajectory planning for robotic spray painting[J].Robotics,2012:1-6. |
| Click to display the text | |
| [8] | Okamoto J, Adamowski J C,Tsuzuki M S G,et al.Autonomous system for oil pipelines inspection[J].Meehatronics,1999,9(7): 731-743. |
| Click to display the text | |
| [9] | 刘晓洪,郑毅, 高隽恺,等.新型蠕动式气动微型管道机器人[J].液压气动与密封,2007(1):16-18. Liu X H,Zheng Y,Gao J K,et al.New type of creeping type pneumatic micro in-pipe robot[J].Hydraulics Pneumatics & Seals,2007(1):16-18(in Chinese). |
| Cited By in Cnki (11) | |
| [10] | Chen Y, Shao J Y,Zhang C Q,et al.Redundant-robot-based painting system for variable cross-section S-shape pipe[J].Reconfigurable Mechanisms and Robots,2009:743-749. |
| Click to display the text | |
| [11] | Liu T, Zhang B,Jia J X.Electromagnetic navigation system design of the green house spraying robot[J].Mechanic Automation and Control Engineering(MACE),2011:2140-2144. |
| Click to display the text | |
| [12] | 栾振兴. 一种S型管道喷涂机器人的结构设计与分析[D].北京:北京邮电大学,2010. Luan Z X.The design and analysis of an s-shaped pipe spraying robot structure[D].Beijing:Beijing University of Posts and Telecommunications,2010(in Chinese). |
| Cited By in Cnki | |
| [13] | 马青华,付大海. 船舶热力管道的腐蚀与防护[J].现代涂料与涂装,2004(1):10-12. Ma Q H,Fu D H.Corrosion and protection of heat distribution pipelines of ships[J].Modern Paint and Finishing,2004(1):10-12(in Chinese). |
| Cited By in Cnki (1) | |
| [14] | 郑克敏,朱金荣, 沈良,等.椭圆异型管的研制和开发[J].上海煤气,2000(4):1-10. Zheng K M,Zhu J R,Shen L,et al.The research and development of elliptic section tube[J].Shanghai Gas,2000(4):1-10(in Chinese). |
| Cited By in Cnki | |
| [15] | 郭永鑫,杨开林, 郭新蕾,等.大型管道输水系统充水过程滞留气泡对输水能力的影响[J].水利学报,2013,3(3):262-267. Guo Y X,Yang K L,Guo X L,et al.Effect analysis of the detained air pockets to the conveyance capacity in large-scale pipelines[J].Journal of Hydraulic Engineering,2013,3(3):262-267(in Chinese). |
| Cited By in Cnki | |
| [16] | Luo Z S, Wang X W,Yang H.Analytic study based on failure effects model of adjacent oil pipeline[J].Management Science and Engineering,2009:271-276. |
| Click to display the text | |
| [17] | 陈雁,邵君奕, 张传清,等.复杂管道喷涂系统研制[J].机械设计制造,2009,11(11):1-3. Chen Y,Shao J Y,Zhang C Q,et al.Development of spraying system for complex duct[J].Machinery Design & Manufacture,2009,11(11):1-3(in Chinese). |
| Cited By in Cnki (1) | Click to display the text | |
| [18] | Bennett T, Kakuda T,Kulkarni A,et al.Front surface thermal property measurements of air plasma spray coatings[J].Journal of Applied Physics,2009:105(8):083501. |
| Click to display the text | |
| [19] | 安永植,安永辰. 机器人位姿误差校正方法[J].哈尔滨工业大学学报,1993,25(1):77-82. An Y Z,An Y C.The method of robot pose error correction[J].Journal of Harbin Institute of Technology University,1993,25(1): 77-82(in Chinese). |
| Cited By in Cnki | |
| [20] | He C,Olds K, Iordachita I,et al.A new ENT microsurgery robot:error analysis and implementation[C]//Proceedings-IEEE International Conference on Robotics and Automation,2013:1221-1227. |
| Click to display the text |
