 ,��ֱ�����ᵼ��(�����ת����)Cmq��ϴ��ʱ���(��Ƽ��ٶȵ���)�����.��ͳλ����������Ϊ:ʱ�������ϵ�������ռ�ı�����С,����Cmq+����Cmq����.����,�ر��������ִ��Ƽ��Ľ�����ս�����������,�����˾��д�ӭ�ǡ����������������ķ�����,��������Ƽ��˶���ʽ���ȴ�ͳ����������,�����ķ����Լ��Ƕ�����Ҳ��ǿ.�������۲�һ������,������������������ʱ�������ϵ�������ռ�����ϴ�[1](�ɴ�40%��50%)������ʵ�ʷ�����,�������ĸ������ٶȺ�ӭ�DZ仯�ʲ����������,�����Ҫ�ֱ�ȷ����ϵ����ĸ�������.Ŀǰ�綴���鼰����Ը������ᵼ���������о�������.һ��綴�ṩ����ֱ����,���ܽ���ֱ�����ᵼ��Cmq������.����,������[2]����������Ʒ��̵������Է���,ֱ�ӵõ����ᵼ���ĸ�������,���о��˼���Ƶ�ʵ�Ӱ��,��ΰ����[3]����ǿ�ȳ����˶���ʽ,��ֵģ���˸߳����ٷ��زռ���������(HBS)�ļ��ٶȵ���,�о�ָ������ϵ���С����������,���ٶȵ����ķ��ſ��ܴ�����,����������,���ڶ����ȶ����.�ﺣ��[4]�ڵ��ٷ綴�н����˼��ٶȵ���������,ָ������<30�㷶Χ��,���ٶȵ�����Լ����ϵ�����30%��50%.����,����ARL(Army Research Laboratory)��Weinacht[5, 6]��Ӣ����Qin����[7]���ö����������ת�˶��������˶�,�����ANSR(Army-Navy Spinner Rocket)��ȹ״�������ֱ�����ᵼ��Cmq��ʱ���,���÷���ֻ��������Գ�����.���Ľ�ϼ���������ѧ(CFD)������չ�˷������������ᵼ��������������ֵģ���о�.������������ֱ�ӻ��ֱ�����ᵼ��Cmq,���ǿ�ȳ����˶����ϴ��ʱ���,���ǿ�ȸ�����ø���������ϵ���Cmq+.ͨ��HBS��������������(Basic Finner)��ģ��������ֵ������֤���о�,̽��������λ�öԸ����ᵼ����Ӱ���Լ����¸����ᵼ���ı仯����,�ڴ˻����ϼ������ձ������������Hyflex�ĸ����ᵼ��. 1 ���㷽�� 1.1 �������Ʒ����������Ʒ���Ϊ��ά�Ƕ�����ѹ��Navier-Stokes����.һ����������ϵ��,�����ٻ��ķ����غ���ʽΪ[8]
,��ֱ�����ᵼ��(�����ת����)Cmq��ϴ��ʱ���(��Ƽ��ٶȵ���)�����.��ͳλ����������Ϊ:ʱ�������ϵ�������ռ�ı�����С,����Cmq+����Cmq����.����,�ر��������ִ��Ƽ��Ľ�����ս�����������,�����˾��д�ӭ�ǡ����������������ķ�����,��������Ƽ��˶���ʽ���ȴ�ͳ����������,�����ķ����Լ��Ƕ�����Ҳ��ǿ.�������۲�һ������,������������������ʱ�������ϵ�������ռ�����ϴ�[1](�ɴ�40%��50%)������ʵ�ʷ�����,�������ĸ������ٶȺ�ӭ�DZ仯�ʲ����������,�����Ҫ�ֱ�ȷ����ϵ����ĸ�������.Ŀǰ�綴���鼰����Ը������ᵼ���������о�������.һ��綴�ṩ����ֱ����,���ܽ���ֱ�����ᵼ��Cmq������.����,������[2]����������Ʒ��̵������Է���,ֱ�ӵõ����ᵼ���ĸ�������,���о��˼���Ƶ�ʵ�Ӱ��,��ΰ����[3]����ǿ�ȳ����˶���ʽ,��ֵģ���˸߳����ٷ��زռ���������(HBS)�ļ��ٶȵ���,�о�ָ������ϵ���С����������,���ٶȵ����ķ��ſ��ܴ�����,����������,���ڶ����ȶ����.�ﺣ��[4]�ڵ��ٷ綴�н����˼��ٶȵ���������,ָ������<30�㷶Χ��,���ٶȵ�����Լ����ϵ�����30%��50%.����,����ARL(Army Research Laboratory)��Weinacht[5, 6]��Ӣ����Qin����[7]���ö����������ת�˶��������˶�,�����ANSR(Army-Navy Spinner Rocket)��ȹ״�������ֱ�����ᵼ��Cmq��ʱ���,���÷���ֻ��������Գ�����.���Ľ�ϼ���������ѧ(CFD)������չ�˷������������ᵼ��������������ֵģ���о�.������������ֱ�ӻ��ֱ�����ᵼ��Cmq,���ǿ�ȳ����˶����ϴ��ʱ���,���ǿ�ȸ�����ø���������ϵ���Cmq+.ͨ��HBS��������������(Basic Finner)��ģ��������ֵ������֤���о�,̽��������λ�öԸ����ᵼ����Ӱ���Լ����¸����ᵼ���ı仯����,�ڴ˻����ϼ������ձ������������Hyflex�ĸ����ᵼ��. 1 ���㷽�� 1.1 �������Ʒ����������Ʒ���Ϊ��ά�Ƕ�����ѹ��Navier-Stokes����.һ����������ϵ��,�����ٻ��ķ����غ���ʽΪ[8] 
ʽ��,Q Ϊ�غ��ʸ��; F ��G �� H Ϊ����ͨ��; Fv��Gv��HvΪ���ͨ��;�Σ�������Ϊ3����������ϵ����;tΪʱ��;Re�� Ϊ����������ŵ��.���������û��ڽṹ��������������,�ռ��ʽ����Roe��ʽ��Minmod������,ʱ����ɢ����ΪLU-SGS(Lower-Upper Symmetric Gauss-Seidel)����,�Ƕ���ʱ���ƽ�����˫ʱ�䲽����.����SA����ģ��ģ����¿��ܴ��ڵķ�������,ʹ��Open-MP���м��������Ч��. 1.2 ֱ�����ᵼ�����㷽��ֱ�����ᵼ�����������������ڷ���������̬���ٶȵı仯��������ֲ�ӭ�ǵı仯,�����������ǰ������֮����������ӵ���������,���������ضԽ��ٶȵĵ�����Ϊֱ�����ᵼ��,����������������.����������ϵx�ᳯǰ,y�ᳯ��,z���������ַ���.���IJ�����������,�����������z���Ժ㶨�������ٶ�q����,ij˲ʱ����������

ʽ��,CmΪ���������Ƚ�����q����ʱ˲ʱ���������ĸ�������;Cm0Ϊ�������ٶ�Ϊ��ʱ���������ĸ�������;lΪ��������;u��Ϊ�����ٶ�;
 Cm0ͨ������������;Cm�ļ�����Ҫ���Ǹ������ٶ������ǣ���ٶȵ�Ӱ���Է�ӳ�ֲ�ӭ�ǵı仯,�����ڿռ��ʽ������߽������м���ǣ���ٶȵĹ���,ͬʱ���ֲ���,����������������ʱ���ƽ�,����һ����̬ЧӦ,�������������������������.
Cm0ͨ������������;Cm�ļ�����Ҫ���Ǹ������ٶ������ǣ���ٶȵ�Ӱ���Է�ӳ�ֲ�ӭ�ǵı仯,�����ڿռ��ʽ������߽������м���ǣ���ٶȵĹ���,ͬʱ���ֲ���,����������������ʱ���ƽ�,����һ����̬ЧӦ,�������������������������. 
��Ҫ˵������,���IJ��õķ�����ͬ������[5, 6, 7]�в��õķ���,������Weinacht�����ڷǹ�������ϵ��ͨ�����������Ʒ���������Դ��������ǣ���ٶȵ�Ӱ��,�����ķ������ڹ�������ϵ��,�����˶��ٶ������˲̬���,ֻ�轫�������ǿ���˶��ij��������ļ���ʵ��. 1.3 ϴ��ʱ������㷽��ϴ��ʱ����������ǷǶ�����,��ӳ��ϴ��ʱ��Է���������������.ϴ��ʱ��������������ڷ�����������ֱ��������ʱ��������̬�ȶ��Եı仯,���Ƿ��������ʱһ����Ҫ����Ʋ���.����������ϵ,���������˶���ʽ����[3]:
��ʽ(4)�������˶���ʽ��,�ɵ�˲ʱ���ǵ��˶���ʽΪ

ʽ��,��0Ϊ��ʼ����;��mΪ�������;��Ϊ������;kΪ����Ƶ��.��ʽ(4)��ʽ(5)ȷ���ij����˶���,ȷ���˶���״̬����ֻ�й��Ǽ��������,����Etkin�Ƕ���������ģ��,Cm��д��

��С����˶������,��ʽ(6)̩��չ������ȥ�߽�С����

ʽ��
��Ϊ��Ҫ���ϴ��ʱ���,�ɲ��û��ַ�����С���˷����в�����ʶ.�������ᵼ��Cmq+�ļ������ǿ������,������ֵ���㷽���μ�����[9, 10]. 2 ��ֵģ�������������ڲ���������ֵ���㷽��,��HBS��ģ���μ����������������ν��м�����֤���о�����,���ڴ˻����϶�Hyflex�����������о�. 2.1 HBS�����о�HBSΪһ����������������������ȹ���ĸ߳����ٵ������α�ģ,��ͼ 1��ʾ.�䶯̬�����н�Ϊ��ȷ��������[11],����������֤��������ȷ�̶�. |
| ͼ 1 ��������ʾ��ͼFig. 1 Schematic of hyperballistic shape (HBS) |
| ͼѡ�� |
��������Ϊ:Ma=6.85,��ͷ��ֱ��Ϊ�ο����ȵ�Red=0.72��106,����λ��Xcg/L=0.72,��0=0��,5��,10��,15��,20��.ǿ�ȳ����˶������ļ���Ƶ��k����Ϊ:k=��d/2u��,dΪͷ��ֱ��.���ڼ���ʱȡk=0.01,���ȡ��m=1��.ͼ 2�����˼���õ��ĸ�������ϵ������.����ͼ 2(a)ΪHBS���θ������ٶ�ȡq=0,100,300,500,700,1�B000(��)/sʱ�ĸ�������ϵ���仯����,���Կ���,��������ϵ���温�����ٶȳ���ȫ���Ա仯,��б�ʼ�Ϊֱ�����ᵼ��,б�ʶ�Ϊ��,˵��ֱ�����ᵼ��Ϊ��,������������.ͼ 2(b)Ϊǿ�ȳ����˶�ʱ��������ϵ���ij��ͻ�,ͼ 2(c)Ϊǿ�Ƚ���ʱ��������ϵ���ij��ͻ�,�Ա���ͼ���Է���,�����˶��ij��ͻ��Ƚ���,����0�㡫15��ij��ͻ�Ϊ˳ʱ�뷽����ת,���ڳ��ͻ�����ת�������������������,�����������������ֵ��С,��˵��HBS��ϴ��ʱ����ڸ������ᵼ������ռ������С����0�㡫15���ϴ��ʱ���Ϊ��ֵ,��ϴ�������Ǹ������,���ڶ����ȶ����.����Ӧ��ǿ���ij��ͻ��Ƚϱ����Ҹ������¾�Ϊ��ʱ����ת.
 |
| ͼ 2 �������μ�����Fig. 2 Calculation results of hyperballistic shape (HBS) |
| ͼѡ�� |
ͼ 3Ϊ�������ø������ᵼ��������ֵ[11]�Ա�,�� 1Ϊ��������ֱ�����ᵼ����ϴ��ʱ������������ᵼ���ļ�����,����Cmq+
ΪCmq��ֱ����ӵĽ��, Ϊͨ��ǿ����ֱ�ӵõ��ĸ������ᵼ��,����������2%,˵�����ķ�չ�ļ��㷽������ȷ��,���Ҽ������Ǿ�ȷ��.
Ϊͨ��ǿ����ֱ�ӵõ��ĸ������ᵼ��,����������2%,˵�����ķ�չ�ļ��㷽������ȷ��,���Ҽ������Ǿ�ȷ��.  |
| ͼ 3 �����������ᵼ�����������������Ա�Fig. 3 Calculation and experiment results of pitch-damping derivatives for hyperballistic shape (HBS) |
| ͼѡ�� |
�� 1 �������ᵼ�������� Table 1 Caculation results of pitch-damping derivatives for hyperballistic shape (HBS)
| ��/(��) | Cmq | | Cmq+ | |
| 0 | -20.19 | 1.92 | -18.27 | -18.14 |
| 5 | -20.89 | 3.46 | -17.43 | -17.58 |
| 10 | -22.71 | 5.82 | -16.89 | -16.72 |
| 15 | -29.33 | 4.17 | -25.16 | -25.52 |
| 20 | -43.97 | -10.99 | -54.96 | -56.05 |
��ѡ��
2.2 �����������������о�������������Ϊһ������ͷ����Բ���ε���������4������β��������,��ͼ 4��ʾ.
 |
| ͼ 4 ����������������Fig. 4 Schematic of Basic Finner |
| ͼѡ�� |
��������Ϊ:Ma=1.96,�Եײ�ֱ��Ϊ�ο����ȵ�ReD=0.187��106.ǿ�ȳ����˶������ļ���Ƶ��k����Ϊ:k=��D/2u��,DΪ�ײ�ֱ��.���ڼ���ʱȡk=0.01,���ȡ��m=1��.ͼ 5չʾ�˹̶�����λ��Xcg/D=6.1ʱ,������ֱ�����ᵼ��Cmq��ϴ��ʱ���
���������ᵼ��Cmq+�湥�ǵı仯����(ͼ�����߲�������������϶���,��ͬ).���㹥��Ϊ��=0��,2.5��,4��,5��,10��,15��,20��,25��,30��.���ļ������ŵ����綴����[12]�еĸ���ŵ��״̬��ͬ.��ͼ 5�п��Կ���,���ļ���ĸ������ᵼ���ڴ�ʱ(10������)������ֵ�ǺϽϺ�,��С����ʱ��һ����ƫ��.��Ϊ�������β֧�ŷ�ʽ,Uselton����[13]ע�С����ʱ(6������)�н�ǿ��֧�ܸ��Ŷ������������ظ��Ƚϲ�,ֱ����������һ���̶ȲŻ����֧�ܸ��ŵ�Ӱ��.ֱ�����ᵼ��һֱΪ��ֵ,�������ֵ�湥�������������������;ʱ�����0�㹥�Ǹ���Ϊ��ֵ,��4�㹥�Ǵ������,Ȼ����������,��10�㹥�Ǹ����ﵽ�������,Ȼ��������,��һֱ���ָ�ֵ.ʱ����ķ����Ա仯�����˸������ᵼ���ķ����Ա仯,����������,�����������ȶ����湥���������ǿ,ʱ������Ż��б仯,����ֵ����ϵ�������ռ������С(10%����).  |
| ͼ 5 �����ᵼ���湥�DZ仯����Fig. 5 Variations of pitch-damping derivatives with angles of attack |
| ͼѡ�� |
ͼ 6Ϊ0�㹥��ʱ����ĵ��������ᵼ��������λ�õı仯����ͼ.���������λ��ΪXcg/D=5,6.1,7.��ͼ 6�п��Կ���,ʱ���Ϊ��ֵ,������Xcg/D=5������Ϊ����������λ�ú��ƶ���������;ֱ�����ᵼ������ϵ����������ֲ�,��������[14]����������ƽ�ƹ�ϵʽ(8)��ʽ(10)�ǺϺܺ�.
 |
| ͼ 6 �����ᵼ��������λ�ñ仯����Fig. 6 Variations of pitch-damping derivatives with center of gravity (CG) location |
| ͼѡ�� |
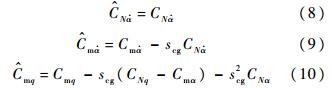
ʽ��
 ,���궨��������ϵ.��ʽֻ��������Գ�����.��Ȼû���ڴ��г�,��������
,���궨��������ϵ.��ʽֻ��������Գ�����.��Ȼû���ڴ��г�,�������� ��Ϊ��ֵ,���ʱ�����ֵ�����ĺ�������,���������ȶ�������ķ���չ.��ֱ�����ᵼ��������ƫ�����Ǹ��ӵĶ��κ�����ϵ.����ֵ������,����һ������λ��ʹ�������ᵼ��ֵ���,�����ȶ������. 2.3 Hyflex�����о�Hyflex(Hypersonic Flight Experiment)���ձ�HOPE-X�ƻ����йش�����������Ŀ�Ĵ������������θ߳����ٷ�����,������֤�Ƶ��Ϳ����Լ��ȷ������Ϻͽṹ�ȼ���.����1996��2�½��з�������,����ѡȡ�����ĩ�˵�����(����2.0,�߶�30�Bkm)�����о�[15],�õ����㴦�ڷ���������ɡ��ɡǰ,�䶯̬���Զ��ڼ���ɡ�Ŀ�������������Ҫ��Ӱ��.��������������ͼ������ͼ��ͼ 7.
��Ϊ��ֵ,���ʱ�����ֵ�����ĺ�������,���������ȶ�������ķ���չ.��ֱ�����ᵼ��������ƫ�����Ǹ��ӵĶ��κ�����ϵ.����ֵ������,����һ������λ��ʹ�������ᵼ��ֵ���,�����ȶ������. 2.3 Hyflex�����о�Hyflex(Hypersonic Flight Experiment)���ձ�HOPE-X�ƻ����йش�����������Ŀ�Ĵ������������θ߳����ٷ�����,������֤�Ƶ��Ϳ����Լ��ȷ������Ϻͽṹ�ȼ���.����1996��2�½��з�������,����ѡȡ�����ĩ�˵�����(����2.0,�߶�30�Bkm)�����о�[15],�õ����㴦�ڷ���������ɡ��ɡǰ,�䶯̬���Զ��ڼ���ɡ�Ŀ�������������Ҫ��Ӱ��.��������������ͼ������ͼ��ͼ 7.  |
| ͼ 7 Hyflex���μ�����ͼFig. 7 Schematic and mesh of Hyflex |
| ͼѡ�� |
��������Ϊ:Ma=2.0,H=30�Bkm,Sref=4.27�Bm2,Lref=4�Bm.���㹥��Ϊ:��=0��,5��,10��,15��,20��.����Ƶ�ʶ���Ϊ:k=��Lref/2u��,���ڼ���ʱȡk=0.01,���ȡ��m=1��.�� 2�����˸������µ�ֱ�����ᵼ����ϴ��ʱ������������ᵼ��������.���Կ���,ֱ�Ӽ���õ��ĸ������ᵼ��
������������ӵõ��ĸ������ᵼ��Cmq+���������Ϊ6%,��Ȼû������������Ϊ�Ա�,��ͨ�����ֲ�ͬ�����õ��ĸ������ᵼ������,ʹ�ñ��ķ�չ�����ᵼ�����㷽������ȷ�Եõ��˺ܺõ���֤.�� 2 Hyflex���ᵼ�������� Table 2 Calculation results of pitch-damping derivatives for Hyflex| ��/(��) | Cmq | | Cmq+ | |
| 0 | -0.241 | -0.243 | -0.484 | -0.468 |
| 5 | -0.249 | -0.308 | -0.557 | -0.538 |
| 10 | -0.252 | -0.783 | -1.035 | -0.968 |
| 15 | -0.270 | -0.989 | -1.259 | -1.253 |
| 20 | -0.286 | -0.146 | -0.432 | -0.412 |
��ѡ��
����,�ӱ� 2�п��Կ���,ֱ�����ᵼ��Ϊ��ֵ,�Ҿ���ֵ�湥�����Ӷ���������;ϴ��ʱ���ҲȫΪ��ֵ,�Ҿ���ֵ�����Ӻ��С,�湥�dzʷ����Ա仯,��-15��ﵽ���,�ڸ������ᵼ������ռ����������С��,��������������(�����ش�78%).��2.1�ں�2.2���о����������,Hyflex�Ǵ������������η�����,β�������ϴ��ʱ��Ч��������. 3 �� �۱����о�ֱ����⸩�����ᵼ�������ķ���,ͨ����HBS�ͻ�����������������ģ���μ�Hyflex������������ֵģ���о�,�������:1) ���õķ����ܹ�ȷԤ����������εĸ������ᵼ���ĸ�������,��ʹ���ڴ�״̬Ҳ���нϺõ�Ԥ�⾫��,�߱�һ���Ĺ���ʵ�ü�ֵ;2) ���ڵ����൯������,���ڳ����ټ��߳�����״̬��,ϴ��ʱ����ڸ������ᵼ������ռ������С,������ſ��ܴ�����,���ȶ�����,������ֵ�����ĺ��ƶ�����;���ڴ���������,������״̬��,ϴ��ʱ����ڸ������ᵼ������ռ�����ϴ�.ֱ�����ᵼ�����۴���������������������ֵ���㶼�Ǹ�ֵ,�����ȶ�����.
�����
| [1] | ���ܸ�. �綴�������鼼��[M].����:���չ�ҵ������,2010:210-250. Li Z F.Special wind tunnel testing technology[M].Beijing:Aviation Industry Press,2010:210-250(in Chinese). |
| [2] | Ren Y X. Evaluation of the stability derivatives using the sensitivity equations[J].AIAA Journal,2008,46(4):912-917. |
| Click to display the text | |
| [3] | ��ΰ, ��С��,���Ʒ�.�߳����ٷ��������ٶȵ�����ֵģ��[J].��������ѧѧ��,2010,28(4):426-429. Liu W,Yang X L,Zhao Y F.Numerical simulation of acceleration derivative of hypersonic aircraft[J].Acta Aerodynamica Sinica,2010,28(4):426-429(in Chinese). |
| Cited By in Cnki (3) | |
| [4] | �ﺣ��. ������������ƽ�Ƽ��ٶȵ�����������[J].������ѧʵ�������,2001,15(4):15-19. Sun H S.A measurement technique for derivatives of aircraft due to acceleration in heave and sideslip at high angle of attack[J].Experiments and Measurements in Fluid Mechanics,2001,15(4): 15-19(in Chinese). |
| Cited By in Cnki (4) | |
| [5] | Weinacht P. Navier-Stokes predictions of the individual components of the pitch-damping coefficient sum,ARL-TR-3169[R].Adelphi:Army Research Laboratory,2004. |
| Click to display the text | |
| [6] | Weinacht P. Projectile performance,stability and free flight motion prediction using computational fluid dynamics[J].Journal of Spacecraft and Rockets,2004,41(2):257-263. |
| Click to display the text | |
| [7] | Qin N, Ludlow D K,Shaw S T,et al.Calculation of pitch damping coefficients for projectiles,AIAA-1997-0405[R].Reston:AIAA,1997. |
| Click to display the text | |
| [8] | �ֳ�. ����������ѧ������Ӧ��[M].����:�������պ����ѧ������,2006:18-25. Yan C.The methodology and application of computational fluid dynamics[M].Beijing:Beihang University Press,2006:18-25(in Chinese). |
| [9] | McGowan G Z, Kurzen M J,Nance R P,et al.High fidelity approaches for pitch damping prediction at high angles of attack,AIAA-2012-2903[R].Reston:AIAA,2012. |
| Click to display the text | |
| [10] | Hashimoto A, Hashizume M,Sunada S,et al.Unsteady analysis of aerodynamic derivatives on standard dynamics model,AIAA-2013-0343[R].Reston:AIAA,2013. |
| Click to display the text | |
| [11] | East R A, Hutt G R.Comparison of predictions and experimental data for hypersonic pitching motion stability[J].Journal of Spacecraft and Rockets,1988,25(3):225-233. |
| Click to display the text | |
| [12] | Uselton B L, Uselton J C.Test mechanism for measuring pitch damping derivatives of missile configurations at high angles of attack,AEDC-TR-75-43[R].Tennessee:AEDC,1975. |
| Click to display the text | |
| [13] | Uselton B L, Jenke L M.Experimental missile pitch- and roll-damping characteristics at large angles of attack[J].Journal of Spacecraft and Rockets,1977,14(4):241-247. |
| Click to display the text | |
| [14] | Murphy C H. Free flight motion of symmetric missiles,NO.1216[R].Aberdeen:Army Ballistic Research Lab,1963. |
| Click to display the text | |
| [15] | Shirouzu M, Yamamoto M.Overview of the hyflex project,AIAA-1996-4524[R].Reston:AIAA,1996. |
| Click to display the text |
