| |
|
| »ъЖчИЛЧФЙнФлЙщ»·ҫіПВөДЧФ¶ҜУпТфК¶ұр |
| НхҪЁИЩ1, ХЕҫд1, В·ОД»А2, ОәҪЁ№ъ2, өіҪЁОд1 |
1. МмҪтҙуС§ јЖЛг»ъҝЖС§УлјјКхС§Фә, МмҪт 300072;
2. МмҪтҙуС§ ИнјюС§Фә, МмҪт 300072 |
|
| Automatic speech recognition with robot noise |
| WANG Jianrong1, ZHANG Ju1, LU Wenhuan2, WEI Jianguo2, DANG Jianwu1 |
1. School of Computer Science and Technology, Tianjin University, Tianjin 300072, China;
2. School of Computer Software, Tianjin University, Tianjin 300072, China |
| |
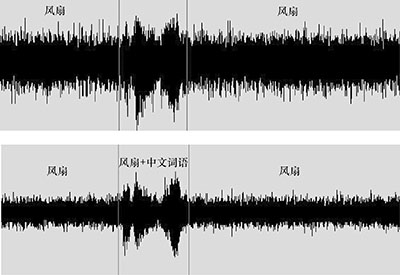
| ХӘТӘөұ»ъЖчИЛТЖ¶ҜЙнМеИОәОІҝО»КұЈ¬¶ј»бІ»ҝЙұЬГвөШІъЙъЧФЙнФлЙщЎЈХвР©ЧФЙнФлЙщУЙЙнМе№ШҪЪ»тЖдЛыУІјюЙиұёИз·зЙИөИТэЖрЎЈУЙУЪЧФЙнФлЙщҫаАл»ъЖчИЛВуҝЛ·зҪПҪьЈ¬ҪПДҝұкЙщФҙёьИЭТЧұ»»сИЎЎЈёГОДёщҫЭ»ъЖчИЛЧФЙнФлЙщЦЦАаЈ¬МбіцБЛТ»ЦЦҪ«ЖЧјх·ЁЎў№ШҪЪФлЙщДЈ°ејх·ЁЎў»щУЪұкЧўЗшУтөДө№ЖЧҫщЦөјх·ЁТФј°¶аМхјюСөБ·ПаҪбәПөД·Ҫ·ЁЈ¬ҙУ¶ш№АјЖәНТЦЦЖЧФЙнФлЙщЎЈТ»ПөБРКөСйЦӨГчБЛЛщМбіцөД·Ҫ·ЁҝЙТФУРР§өШјхЙЩЧФЙнФлЙщУ°ПмЈ¬МбёЯУпТфК¶ұрөДВі°фРФЎЈ |
| №ШјьҙК Јә»ъЖчИЛ,УпТфК¶ұр,УпТфФцЗҝ |
| AbstractЈәRobots inevitably produce noise when they are moving any part of their body. Such noise is caused by the various body joint motors as well as the CPU cooling fans. Moreover, these noises are easily captured by the robots' microphones because they are closer to the microphones than the target speech source. This paper presents a de-noising method using the spectral subtraction, joint noise template substraction, labeled area cepstral mean substraction and multi-condition training to estimate and suppress robot noise. Tests show that this method significantly reduces the effect of robot noise which enhances the automatic speech recognition. |
| Key wordsЈәrobotspeech recognitionspeech enhancement |
| КХёеИХЖЪ: 2016-06-20 іц°жИХЖЪ: 2017-02-21 |
|
| НЁС¶ЧчХЯ:В·ОД»А,ёұҪМКЪ,E-mail:wenhuan@tju.edu.cnE-mail: wenhuan@tju.edu.cn |
| [1] | Ince G, Nakadai K, Rodemann T, et al. A hybrid framework for ego noise cancellation of a robot[C]//2010 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ:IEEE Press, 2010:3623-3628. |
| [2] | Breazeal C L. Designing Sociable Robots[M]. Boston, MA:MIT Press, 2004. |
| [3] | Miwa H, Okuchi T, Itoh K, et al. A new mental model for humanoid robots for human friendly communication introduction of learning system, mood vector and second order equations of emotion[C]//Proc 2003 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ:IEEE Press, 2003, 3:3588-3593. |
| [4] | Nakadai K, Lourens T, Okuno H G, et al. Active audition for humanoid[C]//Proc of the 17th National Conference on Artificial Intelligence and 12th Conference on Innovative Applications of Artificial Intelligence. Palo Alto, CA:AAAI Press, 2000:832-839. |
| [5] | Even J, Sawada H, Saruwatari H, et al. Semi-blind suppression of internal noise for hands-free robot spoken dialog system[C]//Proc 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ:IEEE Press, 2009:658-663. |
| [6] | Cohen I, Berdugo B. Speech enhancement for non-stationary noise environments[J]. Signal Processing, 2001, 81(1):2403-2418. |
| [7] | Cohen I, Berdugo B. Noise estimation by minima controlled recursive averaging for robust speech enhancement[J]. IEEE Signal Processing Letters, 2002, 9(1):12-15. |
| [8] | Ito A, Kanayama T, Suzuki M, et al. Internal noise suppression for speech recognition by small robots[J]. IEICE Technical Report Speech, 2005, 105:43-48. |
| [9] | Nishimura Y, Ishizuka M, Nakadai K, et al. Speech recognition for a humanoid with motor noise utilizing missing feature theory[C]//2006 6th IEEE-RAS International Conference on Humanoid Robots. Piscataway, NJ:IEEE Press, 2006:26-33. |
| [10] | Ince G, Nakadai K, Rodemann T, et al. Incremental learning for ego noise estimation of a robot[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ:IEEE Press, 2011:131-136. |
| [11] | Ince G, Nakadai K, Rodemann T, et al. Ego noise suppression of a robot using template subtraction[C]//Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ:IEEE Press, 2009:199-204. |
| [12] | Boll S. Suppression of acoustic noise in speech using spectral subtraction[J]. Processing IEEE Transactions on Acoustics Speech & Signal, 1979, 27(2):113-120. |
| [13] | Viikki O, Bye D, Laurila K. A recursive feature vector normalization approach for robust speech recognition in noise[C]//Proc 1998 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway, NJ:IEEE Press, 1998, 2:733-736. |
| [1] | ёКХсТө, іВәЖ, СоәиОд. ҪбәПEEMDУлK-SVDЧЦөдСөБ·өДУпТфФцЗҝЛг·Ё[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2017, 57(3): 286-292. | | [2] | ГЧјӘМб·°ўІ»АпГЧМб, °¬ҝЛ°Ч¶ы·ЕБЛю¶ы, °¬Л№ҝЁ¶ы·°¬Дҫ¶јАӯ. »щУЪІгҙО»ҜҪб№№өДУпСФДЈРНөҘФӘјҜУЕ»Ҝ[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2017, 57(3): 257-263. | | [3] | Нх№ъАЪ, ТБЗҝ, зС¶«ҫ§, іВҝТ, НхБҰЗҝ. ГжПт»ъЖчИЛЕзНҝөД¶аұдБҝНҝІгәс¶И·ЦІјДЈРН[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2017, 57(3): 324-330. | | [4] | °¬Л№ҝЁ¶ы·ИвЧО, ТуКө, ХЕЦ®УВ, Нх¶«, °¬Л№ҝЁ¶ы·°¬Дҫ¶јАӯ, ЦЈ·Ҫ. THUYG-20:Гв·СөДО¬Об¶ыУпУпТфКэҫЭҝв[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2017, 57(2): 182-187. | | [5] | ХЕЕфФ¶, јЖХЬ, әомҝ, ҪрцО, ә«ОАЙъ. РЎЧКФҙПВУпТфК¶ұрЛг·ЁЙијЖУлУЕ»Ҝ[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2017, 57(2): 147-152. | | [6] | ХЕјМОД, БхАт, іВҝТ. »щУЪAHRS·ҙАЎөД·ВИЛ»ъЖчИЛІҪРРОИ¶ЁҝШЦЖ[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2016, 56(8): 818-823. | | [7] | ХЕјМОД, БхАт, іВҝТ. РЎРН·ВИЛЧгЗт»ъЖчИЛMOS-7өДПөНіЙијЖј°ҫЦІҝУЕ»Ҝ[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2016, 56(8): 811-817. | | [8] | РП°Ік», ХЕЕфФ¶, ЕЛҪУБЦ, СХУАәм. »щУЪSVDөДDNNІГјф·Ҫ·ЁәНЦШСөБ·[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2016, 56(7): 772-776. | | [9] | ВЮАЪ, іВҝТ, ¶Е·еЖВ, ВнХсКй. »щУЪёДҪшРНБЈЧУИәЛг·ЁөДЗъГжЖҘЕдУлО»ЧЛ»сИЎ[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2015, 55(10): 1061-1066. | | [10] | ЙЫҫэЮИ,ХЕҙ«Зе,іВСг,іВҝТ. УГУЪҝХјдДЪЗъГжЕзНҝөДИЯУа¶И»ъЖчИЛ№мјЈ№ж»®·Ҫ·Ё[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2014, 54(6): 799-804. | | [11] | ЕЛУсБъ, Нх№ъАЪ, ЦмАц, іВСг, іВҝТ. №ЬөАЕзНҝ»ъЖчИЛЕзЗ№ФЛ¶ҜЛЩ¶ИУЕ»Ҝ[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2014, 54(2): 212-216. | | [12] | БхјСҫэ, ЛпХс№ъ, ХЕОДФц, іВЗҝ. БҪ¶ЛОьёҪКҪЕАұЪ»ъЖчИЛ»ъРөұЫФЛ¶ҜОуІоРЮХэЛг·Ё[J]. Зе»ӘҙуѧѧұЁЈЁЧФИ»ҝЖС§°жЈ©, 2014, 54(2): 185-190. |
|