| 感应同步器测角系统误差测试及补偿 |
| 李海霞, 张嵘, 韩丰田 |
| 清华大学 精密仪器系, 北京 100084 |
| Error testing and compensation of an inductosyn-based angular measurement system |
| LI Haixia, ZHANG Rong, HAN Fengtian |
| Department of Precision Instruments, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要工程实用的高精度感应同步器测角系统因安装及校准等条件的限制, 有时难以应用圆光栅进行误差密集测补来提高精度。针对该问题研究了一种稀疏误差采样及补偿方法。在分析感应同步器测角系统误差特性的基础上, 提出先测补零位误差引起的细分误差成分, 再处理剩余细分误差的方式, 给出了由棱体获取全面、有效零位误差的方法及应用稀疏误差数据补偿的具体过程。实验表明: 应用该方法后某测角系统精度由最大误差峰峰值11.7″提升至 2.9″。该方法零位误差剔除充分, 实现了稀疏采样条件下感应同步器测角系统误差的全范围有效补偿。 | |||
| 关键词 :感应同步器,误差补偿,误差测试,零位误差,细分误差,多面棱体 | |||
| Abstract:Installation and calibration difficulties restrict the use of circular gratings to improve the precision of practical high-precise inductosyn-based angular measurement systems through angle-error sampling and compensation. The study analyzes appropriate solutions of sparse error sampling and compensation methods for this problem. The error characteristics of inductosyn-based angular measurement systems are analyzed to compensate for the subdivision error caused by the existing zero-point error and other subdivision errors to get the overall zero-point error with a prism. An error compensation method is then given using sparse sampling data. Tests show that the precision of an angular measurement system is improved by this method from a peak to peak error of 11.7″ to 2.9″. The method accurately identifies the zero-point error and provides full-range error compensation with sparse sampling data for an inductosyn-based angular measurement system. | |||
| Key words:inductosynerror compensationerror testingzero- point errorsubdivision errorpolyhedral prism | |||
| 收稿日期: 2015-05-22 出版日期: 2016-07-01 | |||
| |||
| 引用本文: |
| 李海霞, 张嵘, 韩丰田. 感应同步器测角系统误差测试及补偿[J]. 清华大学学报(自然科学版), 2016, 56(6): 611-616. LI Haixia, ZHANG Rong, HAN Fengtian. Error testing and compensation of an inductosyn-based angular measurement system. Journal of Tsinghua University(Science and Technology), 2016, 56(6): 611-616. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2016.22.020或 http://jst.tsinghuajournals.com/CN/Y2016/V56/I6/611 |
图表:
 |
| 图1 感应同步器测角系统[16] |
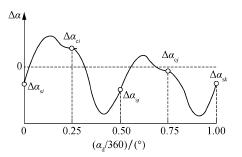 |
| 图2 任一对极下的细分误差示意 |
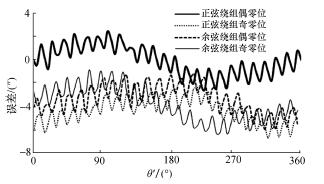 |
| 图3 两相绕组的奇零位、偶零位误差 |
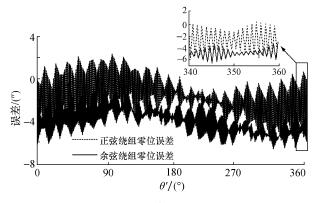 |
| 图4 同一绕组的奇、偶零位误差合并 |
 |
| 表1 任一对极由零位误差引起的细分误差补偿量 |
 |
| 表2 任一对极下的附加误差 |
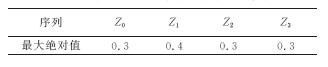 |
| 表3 不同序列测试数据求差后的最大绝对值(″ |
 |
| 图5 4组相对零位误差序列 |
 |
| 图6 以0°为起点检验补偿前后的效果 |
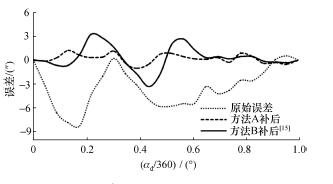 |
| 图7 以90°为起点检验补偿前后的效果 |
 |
| 图8 以180°为起点检验补偿前后的效果 |
 |
| 图9 以270°为起点检验补偿前后的效果 |
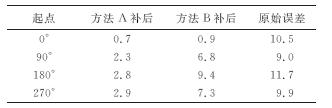 |
| 表4 不同起点检测的最大误差峰峰值(″) |
参考文献:
| [1] LIU Qiang. Application of inductosyns in high precision mechanical servo systems [C]// 2006 1st IEEE Conference on Industrial Electronics and Applications. Singapore, 2006: 1-4. [2] 陈敬泉, 尔联洁, 刘正华, 等. 基于感应同步器的高速高精度位置测量技术 [J]. 北京航空航天大学学报, 2005, 31(4): 447-450. CHEN Jingquan, ER Lianjie, LIU Zhenghua, et al. High speed and accuracy position measuring method based on inductosyn [J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(4): 447-450. (in Chinese) [3] 蔡铁锋, 骆崇. 基于感应同步器的轴角测量系统及其误差分析 [J]. 浙江工业大学学报, 2009, 37(3): 323-325. CAI Tiefeng, LUO Chong. The angle measurement system based on inductosyn and the analysis of its error [J]. Journal of Zhejiang University of Technology, 2009, 37(3): 323-325. (in Chinese) [4] 潘文贵, 付晶, 朱钰, 等. 感应同步器测角系统的电路设计与软件补偿 [J]. 科学技术与工程, 2012, 12(22): 5484-5488. PAN Wengui, FU Jing, ZHU Yu, et al. Circuit design and software compensation in an inductosyn angular measurement system [J]. Science Technology and Engineering, 2012, 12(22): 5484-5488. (in Chinese) [5] 刘承军, 齐明, 邹继斌. 感应同步器测角系统误差建模[J]. 哈尔滨工业大学学报, 2009, 41(9): 51-55. LIU Chengjun, QI Ming, ZOU Jibin. Error modeling of inductosyn angle measuring system [J]. Journal of Harbin Institute of Technology, 2009, 41(9): 51-55. (in Chinese) [6] 陈希军, 任顺清. 感应同步器测角误差的自动化检测与补偿 [J]. 电机与控制学报, 2010, 14(4): 41-45. CHEN Xijun, REN Shunqing. Automatic measurement and compensation of inductosyn angular displacement error [J]. Electric Machines and Control, 2010, 14(4): 41-45. (in Chinese) [7] YI Guoxing, MA Guangcheng, WANG Changhong. The compensation of speed ripple caused by the angle-measuring error of inductosyn using neural network [C]// International Conference on Info-Tech and Info-Net. Beijing, 2001: 340-345. [8] 娄莉娜, 朱革, 王先全, 等. 感应同步器测角系统短周期误差的研究及软件补偿 [J]. 计算机测量与控制, 2010, 18(8): 1730-1732.LOU Lina, ZHU Ge, WANG Xianquan, et al. Error research and software compensation of inductosyn angle measuring system [J]. Computer Measurement & Control, 2010, 18(8): 1730-1732. (in Chinese) [9] DU Chunyang, YANG Guijie. Error analysis and compensation for inductosyn-based position measuring system [C]// Industry Applications Society Annual Meeting (IAS). Salt Lake City, UT, 2003: 6-10. [10] 齐明, 邹继斌, 胡建辉. 神经网络在感应同步器零位误差补偿中的应用 [J]. 中国电机工程学报, 2008, 28(9): 105-110.QI Ming, ZOU Jibin, HU Jianhui. Application of neural network in pitch error compensation of inductosyn [J]. Proceedings of the CSEE, 2008, 28(9): 105-110. (in Chinese) [11] 张翠芳. 基于神经网络的感应同步器测角系统的误差补偿 [D]. 哈尔滨: 哈尔滨工业大学, 2008.ZHANG Cuifang. Error Compensation of Angular Measuring System of Inductosyn Based on Neural Network [D]. Harbin: Harbin Institute of Technology, 2008. (in Chinese) [12] DENG Huiyu, WANG Xinli, MA Peisun. A study of wavelet analysis based error compensation for the angular measuring system of high-precision test turntables [J]. ISA Transactions, 2005, 44: 15-21. [13] 裘祖荣, 陈清清, 李敬杰. 正多面棱体和多齿分度台角分度误差的互检 [J]. 光电工程, 2009, 36(10): 90-93. QIU Zurong, CHEN Qingqing, LI Jingjie. Mutual check of angular deviation for regular polygonal prism and precise angle dividing table [J]. Opto-Electronic Engineering, 2009, 36(10): 90-93. (in Chinese) [14] ZOU An, ZHAO Hui, MA Yehan, et al. Analysis calculation and testing of rotary inductosyn angle measuring errors [C]// 2014 33rd Chinese Control Conference. Nanjing, 2014: 8091-8096. [15] 陈文. 空间稳定平台式惯导系统姿态测量的关键技术研究 [D]. 北京: 清华大学, 2008. CHEN Wen. Research on the Key Technologies of Attitude Measurement in the Space-Stable Platform Inertial Navigation System [D]. Beijing: Tsinghua University, 2008. (in Chinese) [16] 李海霞, 张嵘, 韩丰田, 等. 查表实现双通道测角系统的粗精耦合 [J]. 清华大学学报: 自然科学版, 2014, 54(11): 1481-1485. LI Haixia, ZHANG Rong, HAN Fengtian, et al. Look-up-table method for coarse-fine data coupling for a double-channel angle measurement system [J]. J Tsinghua Univ: Sci and Tech, 2014, 54(11): 1481-1485. (in Chinese) [17] WANG Xianquan, WU Min, ZHU Ge, et al. Research and simulation of amplitude error and quadrature error for inductosyn [C]// 2010 2nd International Asia Conference on Informatics in Control Automation and Robotics. Wuhan, 2010, 2: 354-357. [18] 鲍茂然. 感应同步器精密测角技术研究 [D]. 哈尔滨: 哈尔滨工业大学, 2013. BAO Maoran. Research on Technologies of Precise Angle Measurement Based on Inductosyn Transducer [D]. Harbin: Harbin Institute of Technology, 2013. (in Chinese) [19] 陆永平, 岑文远. 感应同步器及其系统 [M]. 北京: 国防工业出版社, 1982.LU Yongping, CEN Wenyuan. Inductosyn and Its System [M]. Beijing: National Defense Industry Press, 1982. (in Chinese) [20] 齐凤梅, 石治国. 圆感应同步器安装误差修正方法研究 [J]. 光学技术, 2006, 32(8): 445-447. QI Fengmei, SHI Zhiguo. The installation error revise method research of round inductosyn [J]. Optical Technique, 2006, 32(8): 445-447. (in Chinese) |
相关文章:
| ||
