| 5轴混联机床运动学标定的测量轨迹评价及误差补偿 |
| 刘宇哲, 吴军, 王立平, 汪劲松 |
| 清华大学 机械工程系, 北京 100084 |
| Measurement trajectory evaluation and error compensation for kinematic calibration of a 5-axis hybrid machine tool |
| LIU Yuzhe, WU Jun, WANG Liping, WANG Jinsong |
| Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要该文以一台5轴混联机床为对象,对运动学标定中的测量轨迹评价和误差补偿进行实验研究。根据矢量闭环方程和一阶摄动法,分别建立了混联机床的运动学模型和误差模型。基于向量非正交度的描述方法,提出了一种用于评价测量轨迹的指标。利用该指标设计两个不同测量轨迹,并分别进行了标定实验研究,验证了指标的有效性。分析和比较了基于运动学正解和逆解的误差补偿方案,并通过标定实验验证了基于运动学逆解的误差补偿方案更能有效提高该机床的精度。“S”形试件切削实验结果显示94%的测点合格,验证了该指标和误差补偿方案的有效性。 | |||
| 关键词 :运动学标定,混联机床,测量轨迹,误差补偿 | |||
| Abstract:This paper described the kinematic calibration of the measurement trajectory and error compensation of a 5-axis hybrid machine tool. The kinematics model was based on the closed loop vector kinematic equations while the error model was based on the linear perturbation method. An index to evaluate the measurement trajectory was developed from a non-orthogonal index of the trajectory vectors. Two calibration tests were performed using different trajectories. Two error compensation schemes were based on the forward and inverse kinematics. The calibration tests show that the error compensation scheme based on the inverse kinematics has higher compensation accuracy. Finally, a test of machining an "S"-shape test specimen shows that 94% of the detected points are acceptable. The results verify the effectiveness of the index and the error compensation scheme. | |||
| Key words:kinematic calibrationhybrid machine toolmeasurement trajectoryerror compensation | |||
| 收稿日期: 2016-03-18 出版日期: 2016-10-25 | |||
| |||
| 通讯作者:吴军,副教授,E-mail:jhwu@tsinghua.edu.cnE-mail: jhwu@tsinghua.edu.cn | |||
| 引用本文: |
| 刘宇哲, 吴军, 王立平, 汪劲松. 5轴混联机床运动学标定的测量轨迹评价及误差补偿[J]. 清华大学学报(自然科学版), 2016, 56(10): 1047-1054. LIU Yuzhe, WU Jun, WANG Liping, WANG Jinsong. Measurement trajectory evaluation and error compensation for kinematic calibration of a 5-axis hybrid machine tool. Journal of Tsinghua University(Science and Technology), 2016, 56(10): 1047-1054. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2016.22.037或 http://jst.tsinghuajournals.com/CN/Y2016/V56/I10/1047 |
图表:
 |
| 图1 混联机床的结构 |
 |
| 图2 简化后的并联机构模型 |
 |
| 图3 辨识空间 |
 |
| 图4 运动学标定流程 |
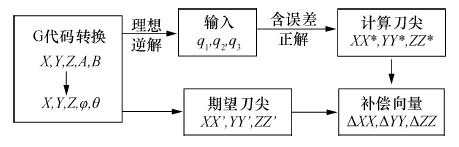 |
| 图5 正解补偿方案流程 |
 |
| 图6 逆解补偿方案流程 |
 |
| 图7 实验测量仪器与原理 |
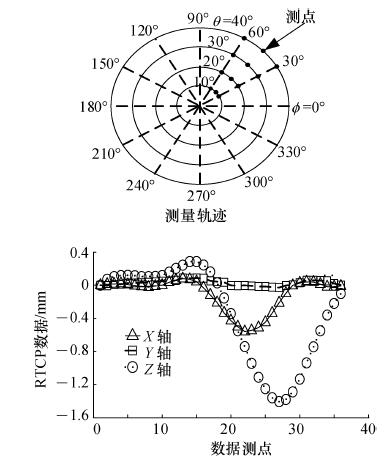 |
| 图8 聚集轨迹RTCP检测结果 |
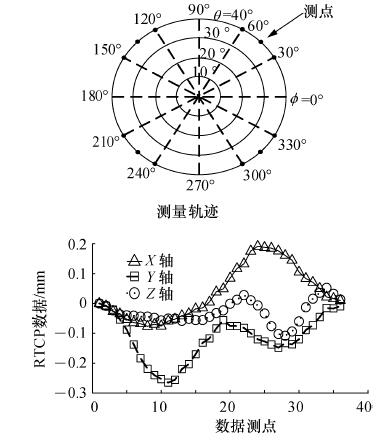 |
| 图9 离散轨迹RTCP检测结果 |
 |
| 图10 正解补偿RTCP检测结果 |
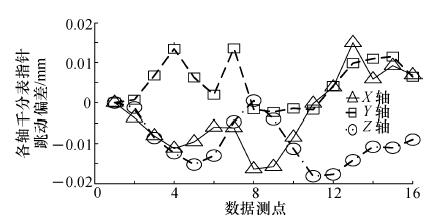 |
| 图11 逆解补偿RTCP检测结果 |
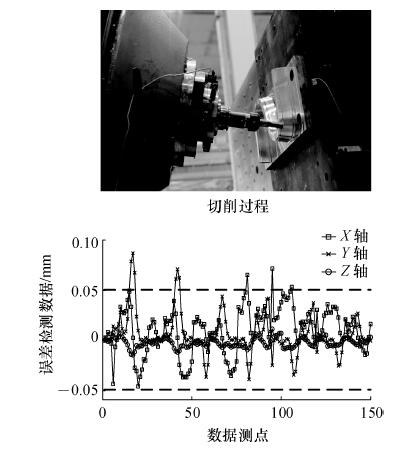 |
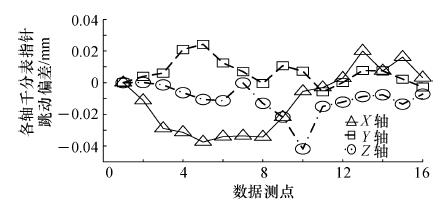
| 图12 切削过程和检测结果 |
参考文献:
| [1] Ramesh R, Mannan M A, Poo A N. Error compensation in machine tools: A review: Part I: Geometric, cutting-force induced and fixture-dependent errors [J]. International Journal of Machine Tools and Manufacture, 2000, 40(9): 1235-1256. [2] WU Jun, CHEN Xiaolei, WANG Liping, et al. Dynamic load-carrying capacity of a novel redundantly actuated parallel conveyor [J]. Nonlinear Dynamics, 2014, 78(1): 241-250. [3] WU Jun, WANG Jinsong, WANG Liping, et al. Dynamics and control of a planar 3-DOF parallel manipulator with actuation redundancy [J]. Mechanism and Machine Theory, 2009, 44(4): 835-849. [4] 谢福贵, 刘辛军, 陈禹臻. 一种新型虚拟中心并联机构的误差灵敏度分析 [J]. 机械工程学报, 2013, 49(17): 85-91.XIE Fugui, LIU Xinjun, CHEN Yuzhen. Error sensitivity analysis of novel virtual center mechanism with parallel kinematics [J]. Chinese Journal of Mechanical Engineering, 2013, 49(17): 85-91. (in Chinese) [5] WU Jun, WANG Dong, WANG Liping. A control strategy of a two degrees-of-freedom heavy duty parallel manipulator [J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137(6), 061007. [6] 黄鹏, 汪劲松, 王立平, 等. 3-PRS 并联机构误差运动学分析及辨识 [J]. 清华大学学报: 自然科学版, 2010, 50(11): 1811-1814.HUANG Peng, WANG Jingsong, WANG Liping, et al. Kinematical error analysis and identification of a 3-PRS parallel mechanism [J]. J Tsinghua Univ: Sci and Tech, 2010, 50(11): 1811-1814. (in Chinese) [7] 邵珠峰, 唐晓强, 王立平, 等. 平面柔性3-RRR并联机构自标定方法[J]. 机械工程学报, 2009, 45(3): 150-155. SHAO Zhufeng, TANG Xiaoqiang, WANG Liping, et al. Self-calibration method of planar flexible 3-RRR parallel manipulator [J]. Chinese Journal of Mechanical Engineering, 2009, 45(3): 150-155. (in Chinese) [8] CHEN Yuzhen, XIE Fugui, LIU Xinjun, et al. Error modeling and sensitivity analysis of a parallel robot with SCARA (selective compliance assembly robot arm) motions [J]. Chinese Journal of Mechanical Engineering, 2014, 27(4): 693-702. [9] Menq C H, Borm J H, Lai J Z. Identification and observability measure of a basis set of error parameters in robot calibration [J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1989, 111(4): 513-518. [10] Driels M R, Pathre U S. Significance of observation strategy on the design of robot calibration experiments [J]. Journal of Robotic Systems, 1990, 7(2): 197-223. [11] Bennett D J, Hollerbach J M. Autonomous calibration of single-loop closed kinematic chains formed by manipulators with passive endpoint constraints [J]. IEEE Transactions on Robotics and Automation, 1991, 7(5): 597-606. [12] CHANG Peng, WANG Jinsong, LI Tiemin, et al. Step kinematic calibration of a 3-DOF planar parallel kinematic machine tool [J]. Science in China Series E: Technological Sciences, 2008, 51(12): 2165-2177. [13] LIU Dawei, WANG Liping, LI Tiemin, et al. A numerical error modeling method for parallel kinematic machines and its applications [J]. Tsinghua Sci and Tech, 2010, 15(5): 489-497. [14] 高猛, 李铁民, 郑浩峻, 等. 并联机床铰链制造误差的补偿 [J]. 清华大学学报: 自然科学版, 2003, 43(5): 617-620.GAO Meng, LI Tiemin, ZHENG Haojun, et al. Compensation for joint manufacturing errors in parallel kinematic machines [J]. J Tsinghua Univ: Sci and Tech, 2003, 43(5): 617-620. (in Chinese) |
相关文章:
|
