| 基于光栅信号的直线电机加速度估计方法 |
| 李志军1,2, 刘成颖1,2, 孟凡伟1,2, 周凯1,2, 张智1,2 |
| 1. 清华大学机械工程系, 北京 100084; 2. 精密超精密制造装备及控制北京市重点实验室, 北京 100084 |
| Linear motor acceleration estimation method based on grating signals |
| LI Zhijun1,2, LIU Chengying1,2, MENG Fanwei1,2, ZHOU Kai1,2, ZHANG Zhi1,2 |
| 1. Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China; 2. Beijing Key Lab of Precision/Ultra-precision Manufacturing Equipments and Control, Beijing 100084, China |
摘要:
| |||
| 摘要直线电机进给系统中,外界干扰如推力、负载力和参数波动等严重影响了直线电机进给系统的性能。加速度控制是一种抑制外界干扰力作用的有效手段,其中获得相位滞后小的加速度信号是加速度控制中的关键内容。光栅尺是直线电机进给系统中最常用的位置传感器,研究基于光栅尺离散脉冲位置的加速度估计方法具有广泛意义。提出了一种基于约束最小二乘曲线拟合的加速度估计方法,该方法首先对直线电机初级的历史位置进行最小二乘曲线拟合,同时要求拟合曲线通过最新位置,然后根据拟合的二次曲线求得加速度。将该方法与基于最小二乘曲线拟合法进行对比,理论分析和仿真实验均表明:该方法在估计快速变化的加速度信号时,具有更小的相位滞后。在估计加速度时,该方法相当于一个有限冲激响应(FIR)滤波器,易于在实时控制系统中实现。 | |||
| 关键词 :直线电机,加速度控制,加速度估计,约束最小二乘法 | |||
| Abstract:The performance of linear motor servo systems is greatly degraded by disturbances such as the cutting force, cogging force, and inertia variations. Acceleration control can effectively suppress disturbances, but such control requires accurate acceleration estimates with less phase lag. Optical encoders are widely used for position measurements in linear motor systems, so the acceleration can be easily estimated from the quantized positions. An acceleration estimation method is given here based on the constrained least squares polynomial fitting technique. The curve fitting is based on a least squares analysis of the historical position of the linear motor with the latest position of the linear motor on the resulting curve fit. Theoretical analyses and simulations both confirm that this method has less phase lag than the normal least squares polynomial fitting technique. This method works like a finite impulse response(FIR) filter for the acceleration estimate, which is convenient for real time control systems. | |||
| Key words:linear motoracceleration controlacceleration estimationconstrained least square method | |||
| 收稿日期: 2012-03-15 出版日期: 2015-12-01 | |||
| |||
| 通讯作者:刘成颖,副教授,E-mail:liucy@tsinghua.edu.cnE-mail: liucy@tsinghua.edu.cn | |||
| 引用本文: |
| 李志军, 刘成颖, 孟凡伟, 周凯, 张智. 基于光栅信号的直线电机加速度估计方法[J]. 清华大学学报(自然科学版), 2015, 55(11): 1258-1263. LI Zhijun, LIU Chengying, MENG Fanwei, ZHOU Kai, ZHANG Zhi. Linear motor acceleration estimation method based on grating signals. Journal of Tsinghua University(Science and Technology), 2015, 55(11): 1258-1263. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2015.21.008或 http://jst.tsinghuajournals.com/CN/Y2015/V55/I11/1258 |
图表:
 |
| 图1 带有位置跳跃的约束最小二乘法(n=6,P=1 |
 |
| 图2 对数坐标下LSM 和CstLSM 滤波器频率响应 |
 |
| 图3 非对数坐标下LSM 和CstLSM 滤波器相频特性 |
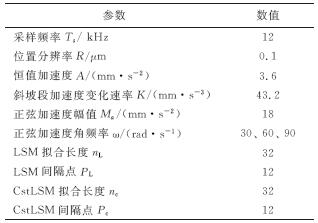 |
| 表1 仿真试验条件 |
 |
| 图4 规划的位置和加速度 |
 |
| 图5 恒值和斜坡加速度估计结果 |
 |
| 图6 恒值加速度和斜坡加速度段的Em 和RMS |
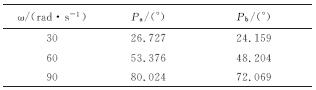 |
| 表2 估计正弦加速度信号的相位滞后 |
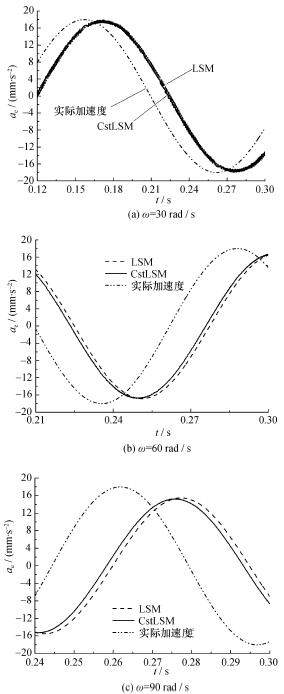 |
| 图7 正弦加速度估计结果 |
参考文献:
| [1] Tan K K, Lim S Y, Lee T H, et al. High-precision control of linear actuators incorporating acceleration sensing[J]. Robotics and Computer-Integrated Manufacturing, 2000, 16(5):295-305. [2] 邱志成, 谈大龙. 基于加速度反馈的柔性关节机械臂接触力控制[J]. 机械工程学报, 2002, 38(10):37-41.QIU Zhicheng, TAN Dalong. On acceleration sensor-based feedback control for contact force of the flexible joint manipulator[J]. Chinese Journal of Mechanical Engineering, 2002, 38(10):37-41.(in Chinese) [3] 徐国柱, 刘樾, 孟凡军. 利用加速度反馈改善转台低速性能[J]. 中国惯性技术学报, 2008, 16(4):502-504.XU Guozhu, LIU Yue, MENG Fanjun. Improving low-rate performance of turntable by acceleration feedback[J]. Journal of Chinese Inertial Technology, 2008, 16(4):502-504.(in Chinese) [4] Han J D, He Y Q, Xu W L. Angular acceleration estimation and feedback control:An experimental investigation[J]. Mechatronics, 2007, 17(9):524-532. [5] 何玉庆, 韩建达. 基于卡尔曼滤波及牛顿预测的角加速度估计方法试验研究[J]. 机械工程学报, 2006, 42(2):226-232. HE Yuqing, HAN Jianda. Experimental study of angular acceleration estimation based on Kalman filter and Newton predictor[J]. Chinese Journal of Mechanical Engineering, 2006, 42(2):226-232.(in Chinese) [6] 何玉庆, 韩建达. 一种新的角加速度估计方法及其应用[J]. 控制理论与应用, 2007, 24(1):6-12.HE Yuqing, HAN Jianda. A new angular acceleration estimation method and its application in acceleration feedback control[J]. Control Theory & Applications, 2007, 24(1):6-12.(in Chinese) [7] Lee S H, Song J B. Acceleration estimator for low-velocity and low-acceleration regions based on encoder position data[J]. IEEE-ASME Transactions on Mechatronics, 2007, 6(1):58-64. [8] Belanger P R, Dobrovolny P, Helmy A, et al. Estimation of angular velocity and acceleration from shaft-encoder measurements[J]. International Journal of Robotics Research, 1998, 17(11):1225-1233. [9] 孟凡军, 徐国柱. 基于卡尔曼滤波器的扰动补偿控制研究[J]. 航空科学技术, 2010(3):39-41.MENG Fanjun, XU Guozhu. Research of disturbance compensator based on Kalman filter[J]. Aeronautical Science and Technology, 2010(3):39-41.(in Chinese) [10] Merry R J E, Van de Molengraft M J G, Steinbuch M. Velocity and acceleration estimation for optical incremental encoders[J]. Mechatronics, 2008, 20(1):20-26. [11] Merry R J E, Van de Molengraft M J G, Steinbuch M. Error modeling and improved position estimation for optical incremental encoders by means of time stamping[C]//2007 American Control Conference. New York, NY, USA:IEEE Press, 2007:1845-1850. [12] Nagatomi H, Ohnishi K. Acceleration estimation method for motion control system with optical encoder[C]//2006 IEEE International Conference on Industrial Technology. Bombay, India:IEEE Press, 2006:2713-2718. [13] Brown R H, Schneider S C, Mulligan M G. Analysis of algorithms for velocity estimation from discrete position versus time data[J]. IEEE Transactions on Industrial Electronics, 1992, 39(1):11-19. [14] Heath M T. Scientific Computing:An Introductory Survey[M]. 2rd ED. Beijing:Tsinghua University Press, 2001. [15] 张德文, 魏阜旋. 再论约束最小二乘法[J]. 计算力学学报, 2000, 17(4):398-404.ZHANG Dewen, WEI Fuxuan. Exposition and argumentation on constrained least square method[J]. Chinese Journal of Computational Mechanics, 2000, 17(4):398-404.(in Chinese) |
相关文章:
| ||
