摘要: 量子密度矩阵描述了量子态的性质, 因此如何有效地测量密度矩阵是量子力学的核心课题之一. 最近, 几个研究组发展了一种基于弱值的直接测量密度矩阵的方法. 相较于常用的量子态层析技术, 这种方法能够更直接和更简便地重构密度矩阵. 然而这种方法需要耦合额外的测量指针, 从而也增加了测量的复杂度和测量系统的设计困难. 本文先回顾并讨论了量子态直接测量的相关研究, 然后基于
δ -淬火直接测量波函数的方法提出了一种新的直接测量密度矩阵的方法. 这种方法无需耦合外部测量指针, 因此可以降低测量的复杂度和测量系统的设计困难, 更进一步地简化了直接测量密度矩阵的实验过程. 基于此方法, 提出了更高信号强度以及更少操作次数等两种无指针直接测量方案, 并对比分析了它们在不同的测量条件下的优缺点. 最后, 具体设计了测量光子密度矩阵的实验.
关键词: 量子测量 /
密度矩阵 /
直接测量 English Abstract Scheme of directly measuring quantum density matrix by δ -quench method Wen Yong-Li 1 ,Zhang Shan-Chao 2,3 ,Yan Hui 2,3 ,Zhu Shi-Liang 2,3 1.National Laboratory of Solid State Microstructures, School of Physics, Nanjing University, Nanjing 210093, China Fund Project: Project supported by the Key-Area Research and Development Program of Guangdong Province, China (Grant No. 2019B030330001), the Key Project of Science and Technology of Guangzhou, China (Grant Nos. 201804020055, 2019050001), the National Key R&D Program of China (Grant No. 2016YFA0301803), and the National Natural Science Foundation of China (Grant No. 12074180)Received Date: 05 February 2021Accepted Date: 06 March 2021Available Online: 22 May 2021Published Online: 05 June 2021Abstract: Density matrix, which characterizes a quantum state, plays an important role in quantum mechanics. Recently, a method which can directly measure the elements of a density matrix was proposed. Compared with the conventional quantum state tomography which is widely used to reconstruct the density matrix, this measurement method has the advantages of directness and simplicity. However, this direct measurement method relies on an extra pointer space. The addition of this extra pointer can increase the complexity of an experiment. In this paper, we first review previous work on direct measurement, then we propose a scheme to directly measure the density matrix based on δ -quench, which is also a direct measurement method but needs no additional pointer. This proposal reduces the complexity of the measuring system and further simplifies the measurement. We propose two schemes to realize this δ -quench measurement, then analyse their superiorities in different situations of measurement. An experiment to measure photon's density matrix is also designed.Keywords: quantum measurement /density matrix /direct measurement 全文HTML --> --> --> 1.引 言 在量子力学中, 量子态用于描述一个量子系统的性质, 是量子力学的核心概念之一. 量子纯态可以用波函数描述, 而更普遍的混合态必须用密度矩阵来刻画, 所以密度矩阵的测量是量子力学的重要课题. 测量量子态常用的方法是量子态层析技术[1 -5 ] . 这种技术需要测量量子体系的系列不对易算符的期望值, 然后把测量结果通过计算来重构量子态. 然而, 这种技术具有局限性, 如投影测量的次数较多, 以及重构算法的复杂度也很大. 而且随着量子系统维度的增加, 量子态层析的复杂度急剧地增加. 例如, 对于一个$ N $ 维量子系统, 要完全重构其密度矩阵, 则需要$ N^{2}-1 $ 个测量算符对应的测量结果. 对于高维度的量子态测量, 这是巨大的挑战. 2011年, Lundeen等[6 ] 提出一种直接测量量子态波函数的方法. 首先将待测量子系统和测量指针进行弱耦合, 然后对系统进行后选择[7 -13 ] , 则量子波函数可以直接从指针态的测量结果中重构. 该测量方法具有直接和简洁的特点, 因此受到广泛的关注[14 -28 ] . 随后, 这种直接测量波函数的方法也被推广到量子密度矩阵的测量中[29 ,30 ] .δ -淬火的无指针直接测量量子波函数的方法[31 ] , 进一步优化了直接测量量子波函数方法. 本文将这种δ -淬火无指针的直接测量方法推广到量子密度矩阵的测量中. 首先介绍有指针直接测量量子波函数及密度矩阵的相关工作; 然后提出弱测量条件下基于δ -淬火的无指针直接测量密度矩阵的方法. 随后提出了强测量条件下的δ -淬火直接测量密度矩阵的方法. 通过对比, 讨论了这两种测量方法在特定情况下各自的优势. 最后提出利用光学系统来实现本文提出的δ -淬火直接测量法的具体实验设计. 本文的研究对于量子态测量实验具有指导意义.2.量子态直接测量方法 22.1.量子波函数的直接测量 2.1.量子波函数的直接测量 在基于Von. Neumann 建立的量子测量理论中, 因为波函数是复数, 而可测量算符的观测结果都是实数, 所以, 量子波函数被认为是难以直接测量的. 基于量子态层析技术, 通过测量系列非对易算符的期望值可以重构量子波函数, 但这种技术需要测量大量结果以及比较复杂的计算. 最近Lundeen及其合作者[6 ] 基于弱值概念[7 ] 提出了一种可以直接测量波函数的方法. 以测量空间位置$ x $ 的光子波函数$ \psi(x) $ 为例, 此时, 可以选择光子的偏振自由度来作测量需要的指针态. 在他们提出的方法中, 将待测波函数和指针之间进行一个足够弱的耦合, 然后对系统进行后选择. 最后, 波函数可以在指针态的测量结果中被重构出来:$ \alpha $ 与测量过程选取的耦合强度有关, 而$\left\langle\hat{\textit{π}}_{x}\right\rangle_{w}$ 被称为弱值, 它是一个复数, 其虚部和实部可以通过测量指针末态$ |s\rangle $ 在泡利矩阵$ \hat{ {\sigma}}_{x} $ 和$ \hat{ {\sigma}}_{y} $ 的期望值得到. 从(2 )式可以看出, 所测出的弱值正比于波函数($ k $ 是一个归一化常数). 这种方法由于可以直接测量到波函数的实部和虚部, 所以被称为波函数的直接测量方法. 然而, 这种基于弱测量的直接测量方法也有局限性, 由于待测波函数与测量指针的耦合比较弱, 所以导致最终的测量结果的信号强度也很弱, 难以应用在一些测量噪声比较大的系统中. 最近的研究发现, 直接测量波函数的方法并不需要局限于波函数与测量指针之间的弱耦合, 其耦合强度可以选取任意值[24 ] , 这种方法弥补了弱测量信号强度比较弱的缺陷, 同时也保留了测量的直接性和简洁性.2.2.量子密度矩阵的直接测量 -->2.2.量子密度矩阵的直接测量 2.1 节介绍的量子直接测量方法是在待测量子态是纯态的基础上讨论的, 对于更一般的情况, 即待测量子态既可能是纯态也可能是混合态时, 一般需要用密度矩阵来表示. 前面介绍的量子波函数的直接测量思想也可以扩展应用到对量子密度矩阵的直接测量. Thekkadath等[29 ] 提出了基于弱测量的直接测量量子密度矩阵的方法. 他们以光子的偏振为待测态, 以光子的横向动量为指针. 类似于波函数的弱测量方法, 该方案先把光子待测偏振态的某个本征态$ |j\rangle $ 与指针进行弱耦合. 与波函数测量不同的是, 他们把对系统进行后选择改成对待测系统的相互无偏态(mutually unbiased bases, MUB)和指针的弱耦合, 此处MUB态可表示为$|b\rangle = \dfrac{1}{\sqrt{d}}\displaystyle\sum\nolimits_{j}|j\rangle$ , $ d $ 为待测系统的维度. 最后把光子投影到另外一个偏振本征态$ |k\rangle $ . 此时可以通过测量光子在不同偏振态下的平均动量和平均位置分别求出弱值$\langle\hat{\varPi}_{jk}\rangle_{w}$ 的实部和虚部. 最后光子偏振态的密度矩阵元$ \rho_{jk} $ 则正比于所测的弱值:[30 ] 的工作对这种直接测量密度矩阵的方法进行了改进, 待测系统与指针的耦合推广到可取任意强度, 并且测量指针也采用了离散的系统. 该工作的测量方案的大致流程如图1(a) 所示, 此方案添加了两个额外的量子比特作为测量指针. 首先将以密度矩阵$ {\rho} $ 描述的系统和指针$ A $ 通过演化算符$\hat{ U}_{A, j} = {\rm e}^{-{\rm i} \theta_{A} \hat{ {\varPi}}_{j} \otimes \hat{ {\sigma}}^{A}_{y}} \otimes \hat{ I}_{B}$ 进行耦合, 其中$\hat{ {\varPi}}_{j} = |j\rangle\langle j|$ 为待测系统本征态$ |j\rangle $ 的投影算符, $\hat{ {\sigma}}^{A}_{y}$ 则为指针$ A $ 的$ y $ 方向泡利算符, $ \theta_{A} $ 为耦合强度. 随后进行类似的耦合操作$\hat{ U}_{B} = {\rm e}^{-{\rm i} \theta_{B} \hat{ {\varPi}}_{b} \otimes \hat{ {\sigma}}^{B}_{y}} \otimes \hat{ I}_{A}$ 将系统与指针$ B $ 耦合, 其中$\hat{ {\varPi}}_{b}$ 为相互无偏态$|b\rangle = $ $ \dfrac{1}{\sqrt{d}}\displaystyle\sum\nolimits_{j}|j\rangle$ 的投影算符. 最后把待测系统投影至本征态$ |k\rangle\langle k| $ , 此时对指针态进行测量, 则密度矩阵元就可被直接重构:图 1 (a) 文献[30 ]中有指针直接测量密度矩阵的方法; (b) 本文提出的无指针直接测量密度矩阵的方法Figure1. (a) Schematic of direct measurement method of the density matrix with pointer in Ref. [30 ]; (b) our proposal of direct measurement method of the density matrix without pointer.$ {\cal{N}}_{A B} $ 为常数, $\big\langle \hat{ {\sigma}}^{A}_{y} \hat{ {\sigma}}^{B}_{y}\big\rangle_{j, k}$ , $\big\langle \hat{ {\sigma}}^{A}_{x} \hat{ {\sigma}}^{B}_{y}\big\rangle_{j, k}$ 以及$\big\langle \hat{ {\varPi}}_{1}^{A} \hat{ {\varPi}}_{1}^{B}\big\rangle_{j, k}$ 为指针末态分别在两个指针组成的二体算符$ \hat{\sigma}^{A}_{y} \hat{\sigma}^{B}_{y} $ , $ \hat{ {\sigma}}^{A}_{x} \hat{ {\sigma}}^{B}_{y} $ 和$\hat{ {\varPi}}_{1}^{A} \hat{ {\varPi}}_{1}^{B}$ ($\hat{ {\varPi}}_{1} = (\hat{ I}-\hat{ {\sigma}}_{z})/2$ )所测得的期望值.2.1 节直接测量波函数的方法类似, 总体来说, 可以认为这种测量方法是把待测量的信息从待测系统本身转移到指针系统, 然后通过指针在不同算符的测量结果分别重构出待测量的实部和虚部.3.无指针δ -淬火法直接测量量子密度矩阵 由2.2 节的介绍可知, 要直接测量密度矩阵需要把待测系统与额外的指针进行耦合. 例如在文献[30 ]中, 其指针态为两个外加的量子比特, 最终的密度矩阵元也需要对待测系统和两个外加量子比特组成的复合系统进行耦合操作以及测量. 然而, 在很多量子系统中, 这个耦合过程往往会极大地增加实验的复杂度. 而且, 耦合指针之后, 待测系统和指针所构成的复合系统维度更高, 从而也容易引入更多的测量误差. 最近我们提出了不需要指针态的直接测量量子波函数的方法, 该方法先对待测系统进行一个δ -形式的扰动, 随后对体系进行后选择, 最终波函数可以通过测量对扰动的响应结果而直接重构出来. 因为这种方法是测量对$ \delta $ 形式扰动的响应, 所以被称为$ \delta $ -淬火方法[31 ] . 这种无指针的直接测量法降低了测量方案的复杂度. 基于$ \delta $ -淬火测量波函数的新方法, 本节提出一种无指针密度矩阵直接测量方法.3.1.基于弱测量的$ \delta $ ![]()
![]()
3.1.基于弱测量的$ \delta $ -淬火直接测量量子密度矩阵的方法 本文提出的基于$ \delta $ -淬火方式测量密度矩阵的方法示意图见图1(b) . 设待测的密度矩阵为$ \hat{ {\rho}} $ , 且$ \hat{ {\rho}} $ 是一个$ N\times N $ 的方阵, $ \rho_{jk} $ 为密度矩阵中第$ j $ 行第$ k $ 列的矩阵元. 由于该方法不使用外部指针, 所以不需要进行指针耦合的操作, 取而代之的是系统相位偏移操作. 相应的演化算符可以表示为$ \hat{ I} $ 为单位矩阵, $ \theta $ 为相位偏移对应的相角, $\hat{ {\varPi}}_{j} = |j\rangle\langle j|$ 为第$ j $ 个本征态的投影算符. 由(5 )式可以看出, $\hat{ U}_{j, \theta}$ 事实上是对系统中的某一特定的本征态$ |j\rangle $ 增加了一个相位因子$ {\rm e}^{{\rm i}\theta} $ , 除$ |j\rangle $ 以外的部分则不受任何影响. 在连续变量体系, 这可以看作是对待测量子系统加了一个$ \delta $ 形式的扰动. 这里参考一下弱测量的处理方法, 当$ \theta $ 很小时, 可以仅保留算符$\hat{ U}_{j, \theta}$ 中关于$ \theta $ 的一阶项, 所以, (5 )式可以近似写为$\hat{ U}_{j, \theta}$ 演化后的密度矩阵就变为$\hat{ {\varPi}}_{b} = |b\rangle\langle b|$ 对应的态是一个MUB态$|b\rangle = \dfrac{1}{\sqrt{d}} \displaystyle\sum\nolimits_{j = 1}^{d}|j\rangle$ , 它是一个由所有本征态等概率叠加而成的态. 与(5 )式类似, 仅保留$ \hat{ U}_{b, \beta} $ 中$ \beta $ 的一阶项,$ \hat{ U}_{j, \theta} $ 和$ \hat{ U}_{b, \beta} $ 并不对易. 经过$ \hat{ U}_{j, \theta} $ 和$ \hat{ U}_{b, \beta} $ 演化后的末态可以表示为$\hat{ {\rho}}_{(\theta, \beta)}$ 投影到本征态$ |k\rangle $ 上进行测量, 可以得到测量结果:$ P_{\theta} $ 理解为末态$ \hat{ {\rho}}_{(\theta, \beta)} $ 处在本征态$ |k\rangle $ 的概率. 如果把第一个相位移动的操作改成一个强度衰减操作, 对应的演化算符改为$ \gamma $ 为一个很小的值, 可以仅保留一阶项. 这个强度衰减操作相当于对系统中的某一特定的本征态$ |j\rangle $ 进行一个微小的强度衰减, 而系统其他部分则不受影响. 这样, 可以得到与(11 )式类似的一个测量结果,$ \hat{ U}_{b, \beta} $ 操作, 然后把系统投影至$ |k\rangle $ 下进行测量, 则测量结果可表示为$ \rho_{kj} = $ $ \rho^{\dagger}_{jk} $ , 所以可得到关系式:$ \rho_{jk} $ 的实部和虚部可以通过$ P_{\theta} $ , $ P_{\gamma} $ 和$ P_{0} $ 的测量结果重构出来:$ \rho_{jj} $ , 则可以简单地将$\hat{ {\rho}}$ 投影至本征态$ |j\rangle $ 下测量得到, 即$ \rho_{jj} = {\rm{Tr}}\{\hat{ {\varPi}}_{j}\hat{ {\rho}}\} $ .30 ]的方法中, 重构一个密度矩阵元需要两个算符的8个投影测量结果. 相比之下, 从(16 )式的结果可以看出, 本文提出的基于$ \delta $ -淬火的无指针直接测量方法仅仅需要三个操作对应的投影测量结果便可直接重构密度矩阵的矩阵元. 而且, 值得注意的是, 其中$ P_{0} $ 是和$ j $ 无关的投影测量结果, 也就是$ P_{0} $ 对于不同的密度矩阵元的测量, 也仅需同一个$ P_{0} $ 参与计算, 这无疑更增加了测量的简洁性.3.2.基于强测量的$ \delta $ ![]()
![]()
-->3.2.基于强测量的$ \delta $ -淬火直接测量量子密度矩阵的方法 3.1 节介绍了基于弱测量的无指针直接测量量子密度矩阵的方法. 然而, 这种方法也有其局限性. 观察(16 )式的结果可知, 测量结果$ P_{\theta}-P_{0} $ 和$ P_{\gamma}-P_{0} $ 需要分别乘以因子$\dfrac{N}{2\sin\theta\sin\beta}$ 和$\dfrac{N}{2\gamma\sin\beta}$ 才能得到$ \rho_{jk} $ 的实部和虚部, 而$ \sin\theta $ , $ \sin\beta $ 和$ \gamma $ 都是比较小的值, $\dfrac{N}{2\sin\theta\sin\beta}$ 和$\dfrac{N}{2\gamma\sin\beta}$ 便是很大的数值, 换言之, 实际测量到的信号事实上是非常微弱的. 所以在弱测量方案中, 信噪比也相应地会比较低. 为了解决这个问题, 本节提出一个信号强度更高的测量方案.$ \hat{ U}_{j, \theta} $ 和$ \hat{ U}_{b, \beta} $ 中的相移角度$ \theta $ 和$ \beta $ 的大小. 现在, 设置$ \theta = \pi/2 $ 以及$ \beta = \pi/2 $ 可得$ |k\rangle $ 下进行测量, 所得测量结果为$ \theta $ 和$ \beta $ 的不同数值组合, 可得到下列测量结果:$ \hat{ {\rho}} $ 的矩阵元$ \rho_{jk} $ 就可以通过上述几个测量结果求得:$ \hat{ {\rho}} $ 的对角矩阵元, 可以通过$ {\rm{Tr}}\{\hat{ {\varPi}}_{j}\hat{ {\rho}}\} = \rho_{jj} $ 求得.$ N = 2 $ 时, 结果可以简化为:27 )式和(16 )式可以看出, ${N}/{8}$ 要远远小于$\dfrac{N}{2\sin\theta\sin\beta}$ 和$\dfrac{N}{2\gamma\sin\beta}$ , 换言之, 强测量方案具有更高的信号强度. 但是, 由于弱测量方案中, 重构密度矩阵元需要执行的演化操作次数比强测量要少, 所以在操作简洁性上比强测量更有优势. 所以, 实际的实验中, 当测量的系统拥有比较低的测量噪声时, 可以采用弱测量的方案, 因为该方案在操作上更加简单, 所需的测量次数也更少. 而如果测量的系统本身有比较大的噪声, 这样弱测量方案所得的测量结果可能会因为信噪比太低而影响精确度, 所以此时可以采用强测量的方案来提高信噪比.3.3.$ \delta $ ![]()
![]()
-->3.3.$ \delta $ -淬火直接测量量子密度矩阵的实验方案 现在, 根据上述理论设计一个光学实验. 实验方案如图2(b) 所示, 待测的密度矩阵为光的路径量子比特. 作为对比, 图2(a) 也给出了文献[30 ]提出的有指针直接密度矩阵测量实验方案.图 2 (a) 文献[30 ]提出的有指针直接测量密度矩阵的实验方案; (b) 本文提出的无指针直接测量密度矩阵实验方案Figure2. (a) Schematic of direct measurement of the density matrix with pointer in Ref. [30 ]; (b) experimental proposal of our direct measurement without pointer.图2(a) 中给出的有指针测量方案中, 光子从光纤发出, 先后由四分之一波片(quarter-wave plate, QWP)、半波片(half-wave plate, HWP)和一个偏振光束偏移器(beam displacer, BD)制备出路径量子比特的初态, 两条路径分别对应着本征态$ |1\rangle_{\rm H} $ 和$ |2\rangle_{\rm V} $ , 这里用下标H和V分别表示水平和垂直偏振. 由于BD可使两相互正交的偏振光横向分离, 所以两路径也分别对应着特定的偏振方向. 随后, 分别用放置在$ |1\rangle_{\rm H} $ 和$ |2\rangle_{\rm V} $ 的两个HWP 实现待测系统(路径)和测量指针(偏振)的耦合, 对应的耦合算符为$ \hat{ U}_{A, j} = {\rm e}^{-{\rm i} \theta_{A} \hat{ {\varPi}}_{j} \otimes \hat{ {\sigma}}^{A}_{y}} \otimes \hat{ I}_{B} $ , 其耦合强度可以通过调整HWP的光轴角度来改变. 此处若选取QWP进行耦合操作, 则对应的耦合算符便是$ \hat{ U}_{A, j} = {\rm e}^{-{\rm i} \theta_{A} \hat{ {\varPi}}_{j} \otimes \hat{ {\sigma}}^{A}_{x}} \otimes \hat{ I}_{B} $ . 在完成耦合后, 用一个HWP和BD进行合束, 这里使用的HWP可以将$ |1\rangle_{\rm H} $ 和$ |2\rangle_{\rm V} $ 转换为$ |1\rangle_{\rm V} $ 和$ |2\rangle_{\rm H} $ , 其目的在于在合束的过程中消除之前分束时引起的两路径的光程差. 合束后再用一个HWP将$ |1\rangle_{\rm V} $ 和$ |2\rangle_{\rm H} $ 逆变换为$ |1\rangle_{\rm H} $ 和$ |2\rangle_{\rm V} $ . 然后, 再用同样的方法实现待测系统和指针的第二次耦合, 实现的耦合算符为$ \hat{ U}_{B} = {\rm e}^{-{\rm i} \theta_{B} \hat{ {\varPi}}_{b} \otimes \hat{ {\sigma}}^{B}_{y}} \otimes \hat{ I}_{A} $ . 最后, 本征态的投影测量可由一个偏振分束器(PBS)和两个光子探测器(detector)来实现.图2(b) 为$ \delta $ -淬火直接测量方案. 类似地, 先用QWP, HWP和BD制备出路径量子比特的初态. 然后, 放置一个液晶相位延迟器(liquid crystal retarder, LCR), 这个LCR可调节两相互垂直的偏振光的相位差, 相当于在其中一条路径产生一个可调的相位偏移. 这个操作等效于实现算符$\hat{ U}_{j, \theta} = $ $ {\rm e}^{{\rm i} \theta\hat{ {\varPi}}_{j}}$ . LCR设置的相位延迟角度对应着算符中的$ \theta $ , 通过调节相位延迟角度的大小可以分别实现强测量和弱测量两种方案. 随后, 同样使用HWP和BD进行合束操作, 并在合束后用HWP进行逆变换. 在此之后, 放置另一个LCR, 该LCR的光轴方向与水平偏振(H)的夹角为$ \pi/4 $ , 这样可以使得MUB态$|b\rangle = (1/\sqrt{2})(|1\rangle_{\rm H}+ |2\rangle_{\rm V})$ 产生一个角度为$ \beta $ 的相位偏移. 这个操作可以实现第二次的相位偏移算符$ \hat{ U}_{b, \beta} = {\rm e}^{{\rm i} \beta\hat{{ {\varPi}}}_{b}} $ . 图2(b) 虚线框中的装置用于实现弱测量方案中所需的强度衰减操作, 其中使用了一个中性密度衰减片(neutral density filter, NDF). 这个NDF仅在其中一条路径进行一个小幅度的强度衰减, 这样可以实现弱测量方案中所需的强度衰减算符$ \hat{ U}_{j, \gamma} = {\rm e}^{-\gamma\hat{ {\varPi}}_{j}} $ . 最后, 使用一个PBS和两个光子探测器实现本征态的投影测量.图2(a) 和图2(b) 可以看出, 有指针的方案中由于需要两次指针的耦合, 所以也进行了两次分束和合束的操作. 另外还需要在两条路径分别放置波片来旋转光的偏振方向, 从而实现指针耦合. 相比之下, 图2(b) 对应的无指针方案只需一次分束和合束, 同时不需要使用波片来对两个路径进行单独的偏振旋转, 仅需使用LCR来对特定路径实现相位偏移. 总体上, 无指针直接测量法在实验设计上相比有指针的方案更为简便.4.结 论 本文提出了利用无指针$ \delta $ -淬火直接测量量子密度矩阵的方法. 由于不需要待测系统和测量指针的耦合操作, 这种方法明显地简化了测量过程. 结果显示, 有指针的直接测量法中, 需要用两个量子比特对应的8个投影测量结果才可重构密度矩阵; 而在本文提出的基于弱测量的无指针直接测量方法中, 仅需3个操作对应的投影测量结果便可以重构密度矩阵元. 另外还提出了基于强测量的实现无指针直接测量量子密度矩阵的方案. 相比于弱测量方案, 强测量方案的信号强度有明显的增强, 但需要执行的操作更多. 这两种方案在特定的应用场景下有着各自的优势. 最后, 根据本文提出的理论方案提出了一个其在光学系统中的实验设计. 本文提出的无指针直接测量方法是对密度矩阵测量方法的重要优化, 在量子态测量实验中有应用价值. 






























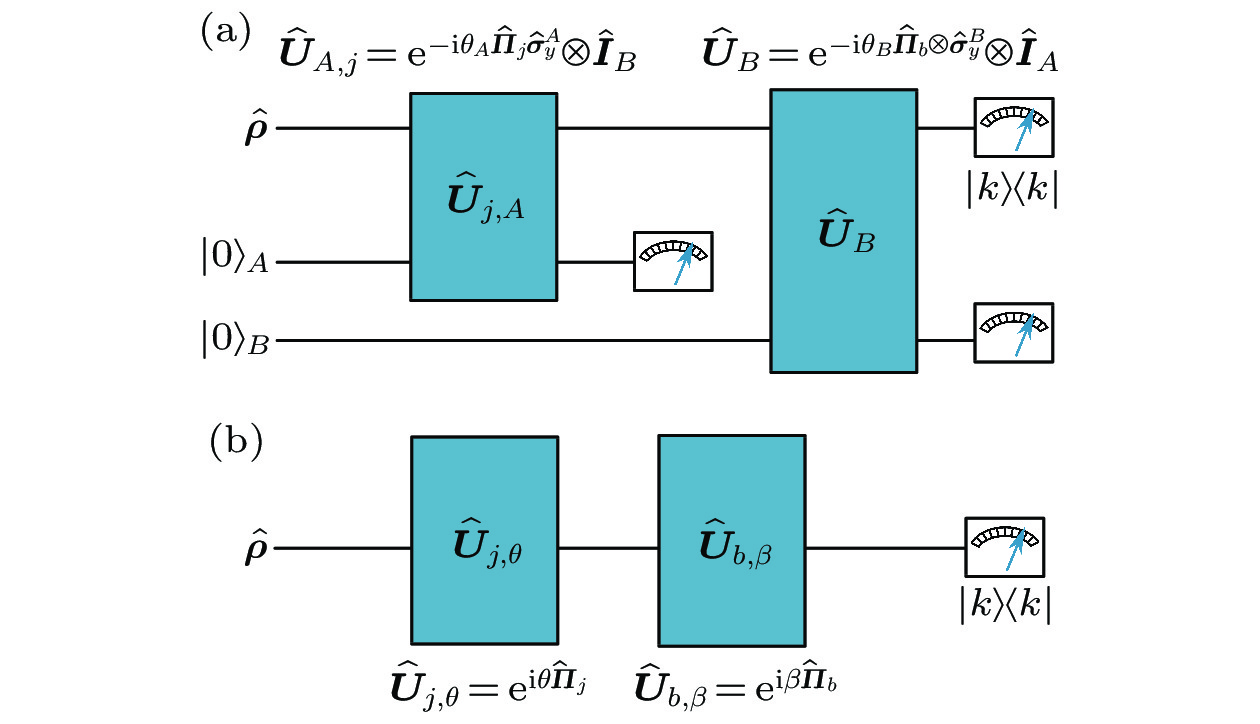 图 1 (a) 文献[30]中有指针直接测量密度矩阵的方法; (b) 本文提出的无指针直接测量密度矩阵的方法
图 1 (a) 文献[30]中有指针直接测量密度矩阵的方法; (b) 本文提出的无指针直接测量密度矩阵的方法




























































































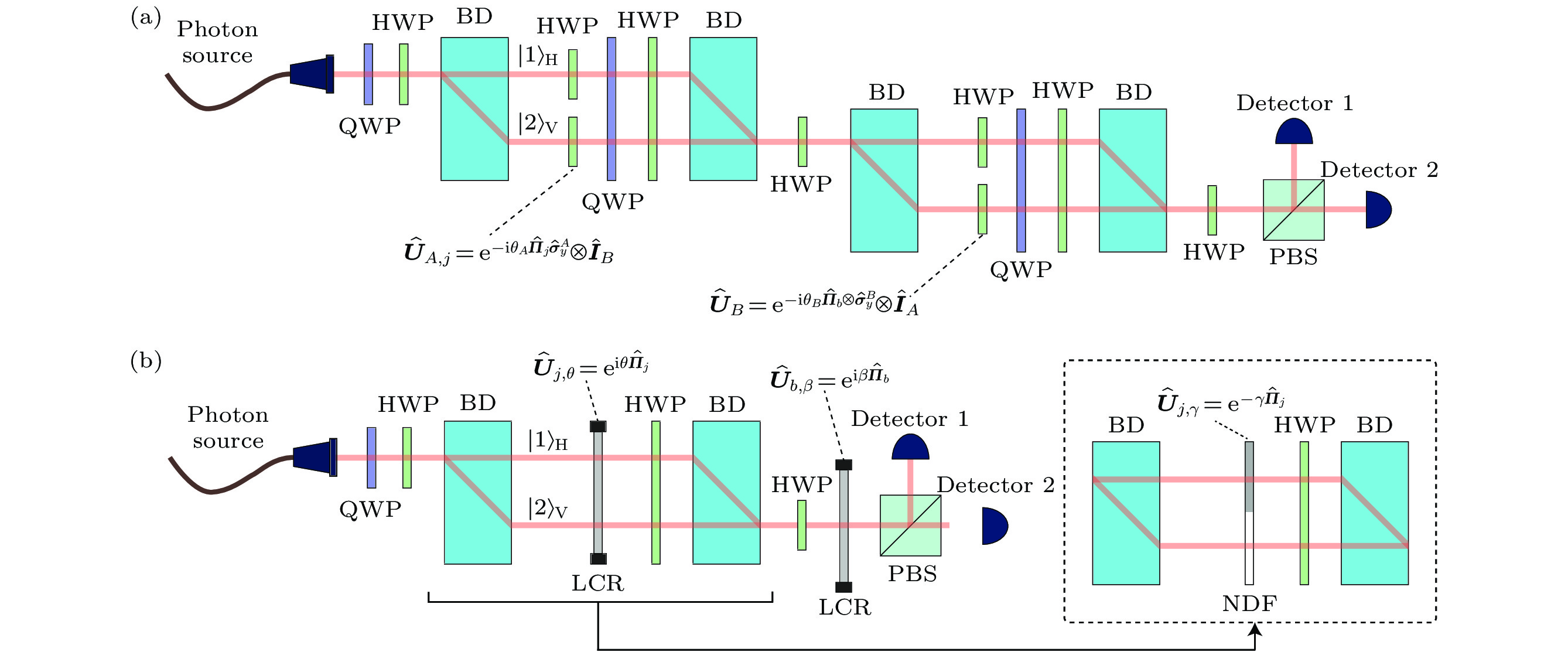 图 2 (a) 文献[30]提出的有指针直接测量密度矩阵的实验方案; (b) 本文提出的无指针直接测量密度矩阵实验方案
图 2 (a) 文献[30]提出的有指针直接测量密度矩阵的实验方案; (b) 本文提出的无指针直接测量密度矩阵实验方案
























