全文HTML
--> --> -->近年来, 基于微观行为的行人流仿真模型主要包括: 离散仿真模型和连续仿真模型. 离散仿真模型, 即仿真时间和空间离散, 如元胞自动机模型[5-7]、领域模型[8]、格子气模型[9]、动态参数模型[10]等; 连续仿真模型, 即仿真时间离散, 而仿真空间连续, 如社会力模型[11-23]、离心力模型[24,25]等. 从仿真方法的角度, 可以分为基于力和基于启发式方法的仿真模型[26-29]. 研究对象主要包括步行通道或疏散空间等步行设施内, 单向或双向行人通过流[12]、疏散流[13]. 疏散场景包括: 行人视线受影响[11], 多安全出口[14]或存在空间障碍物[15]等. 仿真研究再现了许多行人流自组织现象, 例如: 自动渠化[11,12]、通道形成[11,12]、成拱[11,12]、快即是慢[7]、避让三角区[16]、拉链效应[30,31]等.
在基于力仿真模型方面, 经典模型是社会力仿真模型, 提出假想社会力的概念来描述行人之间的相互作用, 行人运动被定量描述为受自驱动力、排斥力和接触摩擦力等合力的影响[11]. 传统社会力模型可以克服元胞自动机模型中行人移动方向和速度固化等问题, 模拟再现更平滑的行人移动轨迹, 更好地定量描述行人之间的动态特性和相互作用; 尽管在模拟行人微观行为与再现宏观现象方面有较强的优势, 但仍然有不足, 例如: 参数复杂难以准确合理校准[18], 会出现行人抖动和重叠现象[19-22]; 仿真少量行人会出现不合理的行人死锁现象[16,28]; 缺乏主动绕行其他行人的机制[16,28]等. 为克服社会力模型的缺点, 从多种角度进行修改完善, 包括: 自驱动力的改进[13]和排斥力的改进[17]; 引入其他参数和参数标定[17]; 构建共轭力使行人可以主动绕行[16]; 为避免行人重叠引入行人停止机制[19,20]、引入基于显式数值积分的算法[21]、引入减速避让机制[22]等.
在基于启发式方法的仿真模型方面[27-29], 很多研究将启发式方法整合到行人建模中, 处理复杂情况并预测更平滑的行人轨迹. Moussa?d等[29]认为行人行为模式改变是通过两种简单的认知过程来完成, 并引入了行人的视觉信息, 提出一种简单的行为启发式模型来捕捉人群行为中的潜在规律; 同时, 局部密度可用于反映行人运动的舒适程度并作为引发行人运动的重要参数[29]. 因为Voronoi图特有的几何特性, 有****将Voronoi图的概念引入到行人动力学领域, 用于确定行人的个人空间、领域、安全距离、邻居, 行人局部密度及基于密度的最佳速度等[27,28]. 在Voronoi图中, 每个粒子分别位于各自的Voronoi元胞中; Voronoi边位于相邻粒子连线的中垂线上, 由两个相邻的Voronoi元胞共享; Voronoi点在非退化条件下关联3个Voronoi元胞, 是3个Voronoi边的交叉点. 在行人仿真过程中, 与行人共享Voronoi边的其他行人可视为行人的邻居, Voronoi元胞的形状会随着行人位置的变化而实时变化. 行人的Voronoi元胞看起来像扭曲的传统元胞自动机, 但又与其不同; Voronoi图中的元胞是不规则的, 且不存在空元胞.
在行人间相互影响和行人关注领域研究方面, 一般常识认为在行人移动过程中行人周围不同方向和距离的行人会对自身产生不同的影响. 例如多个相互不认识的行人一起移动, 后方行人必须要考虑前方行人的状态来决定是否跟随、避让或者超越, 而前方行人却不需要顾及后方行人. 同时, Johansson等[23]基于视频中的行人运动轨迹数据, 发现行人与周围不同方向行人间的相互作用也表现出各向异性的特征, 行人只受其前方约180°空间范围内其他行人的影响, 而几乎不受身后行人的影响. 通过在社会力模型的框架下详细分析行人间的相互作用, 发现不同方向行人对目标行人的影响是不同的, 处于正前方的行人对目标行人的作用力最强, 处于两侧的行人对目标行人的作用力最弱. Yu等[25]在离心力模型中也提到了行人视野范围的问题, 即行人一般只关注视野前方180°范围内的情况, 对两侧顾及得比较少, 对身后就几乎不会去顾及. Porter等[32]提出了IM (integrated model)模型框架, 集成了社会力模型、行为启发式模型及材料科学理论, 充分发挥了每个模型的优势, 将材料科学中“只考虑直接相邻的分子, 就可以很好地模拟分子间相互作用”的理论应用到行人移动的相互影响中, 只考虑行人视野范围中周围行人的影响, 而不是考虑周围所有行人, 从而大大简化了运算量.
在日常观察中, 虽然作为行人流自组织现象之一的拉链现象常被发现, 同时拉链效应也会对行人的移动行为产生影响; 但目前****主要是针对拉链现象的行人实验进行了研究, 而缺乏对拉链效应形成机理的研究. 在行人实验中, Moussa?d等[24], Hoogendoorn等[30]发现行人在移动过程中有侧向行走的倾向; Hoogendoorn等[30]发现通道内单向行人流的“拉链”效应可提高通道的空间利用率和行人的步行速度; Seyfried等[31]发现拉链效应会对通道的通行能力产生影响; Ren等[33]观察到行人的队列层数会随着通道宽度的增加而增加.
对拉链效应的研究, 有利于研究行人拉链现象的生成机理, 以及与步行设施的关系, 从而指导步行设施的规划设计和人流组织. 因此, 本文从拉链效应的表现形式, 生成拉链效应的影响因素, 拉链效应的偏移机制等方面探究拉链效应的生成机理. 基于Voronoi图, 考虑不同距离和方向周围行人对行人移动速度的影响, 构建速度修正模型, 考虑行人是否有偏移倾向的主观意愿, 引入偏移规则, 模拟行人的拉链现象. 以行人的视野关注和视野遮挡描述影响行人移动过程中偏移行为的因素, 以行人局部密度描述行人步行舒适的情况, 引入拉链敏感系数描述行人客观偏移的意愿程度, 提出单个行人侧向偏移的机制, 获得行人最佳的偏移位置. 仿真研究行人的拉链层数与通道宽度的关系, 然后, 通过与其他实证数据对比, 验证模型的可靠性; 研究不同拉链效应主观偏移意愿占比与行人平均速度、平均局部密度的关系等.
2.1.拉链现象
行人流自组织现象是指行人流内部个体行人之间在无外界力量指导下, 出于自身因素和作用, 自发组织和形成的行人流宏观现象. 自组织现象之一的拉链效应[30]是指通道内多条单向行人流队列之间的相互重叠现象. 在通道内运动的单向行人流, 把每一列行人看作一层, 会自发产生层或小道, 不同层间的行人相互交错, 各层行人均占用相邻层的空间, 形成“拉链”现象, 如图1所示. 该现象的产生主要是由于行人需要尽可能地利用通道中的可行空间, 在确保自身行走空间的同时提高自己的视野. 图 1 瓶颈中的行人拉链现象[30]
图 1 瓶颈中的行人拉链现象[30]Figure1. Zipper phenomena of pedestrians in a bottleneck[30].
在拉链效应行人实验中[33], 当充足行人以正常速度通过不同宽度通道时, 可以观察到拉链层数会随通道宽度增加而增加, 如图2所示. 当通道宽度B为0.5—0.7 m时, 因通道宽度较窄, 基本形成1 层行人; 当通道宽度B为0.8—1.1 m时, 随通道宽度增加, 可以观察到形成2—3 层行人; 当通道宽度B为1.2—1.8 m时, 因通道宽度较宽, 可以观察到形成3—4 层行人.
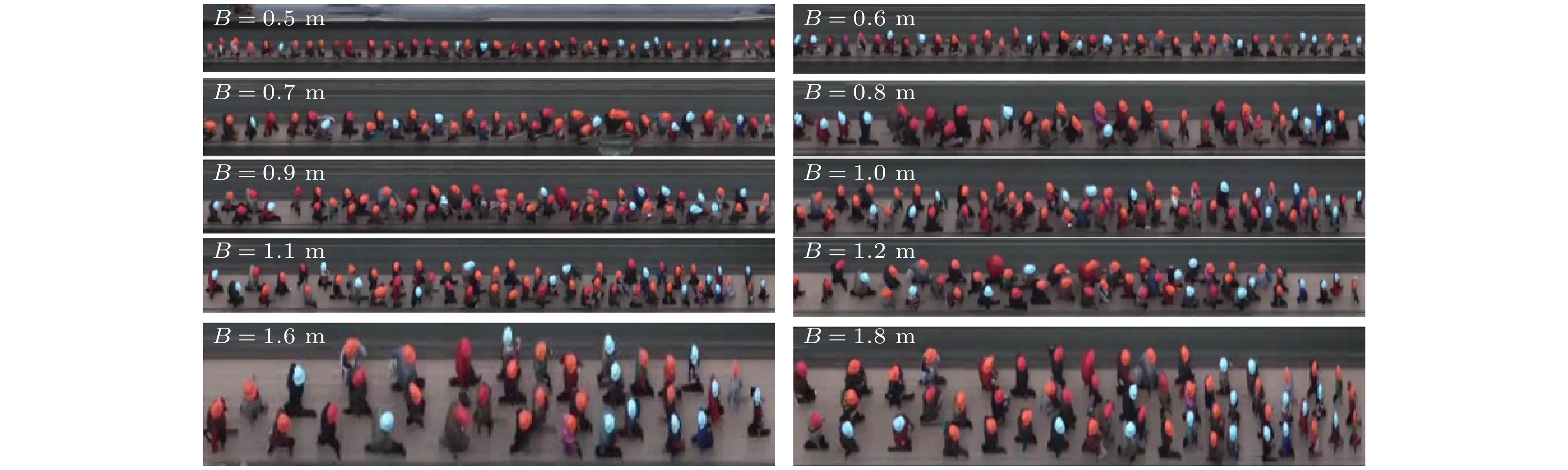 图 2 不同通道宽度下的行人拉链现象[33]
图 2 不同通道宽度下的行人拉链现象[33]Figure2. Zipper phenomenon of pedestrians under different channel widths[33].
2
2.2.表现形式
行人在移动过程中, 手脚有节奏的依次来回摆动, 其所占动态空间投影区域类似圆形. 在相同方向行走过程中, 两相邻行人组成的行人间基本位置形式可分为并排、斜列、直列3种, 如图3所示. 图 3 两相邻行人同方向行走形态 (a)行人行走形态; (b)两行人行走并排形式; (c)两行人行走斜列形式; (d)两行人行走直列形式
图 3 两相邻行人同方向行走形态 (a)行人行走形态; (b)两行人行走并排形式; (c)两行人行走斜列形式; (d)两行人行走直列形式Figure3. Walking pattern of two adjacent pedestrians in the same direction: (a) The real single pedestrian walking pattern; (b) two adjacent pedestrians walking side by side; (c) two adjacent pedestrians walking in a diagonal pattern; (d) two adjacent pedestrians walking in a straight line.
通过分析行人实验[33], 研究通道宽度与行人拉链现象之间的关系, 可以发现当通道宽度仅能容纳一个行人通过时, 行人以直列形式排列, 如图4(a)所示; 当通道宽度不足以容纳两个行人并排通过时, 行人以直列、斜列形式排列, 如图4(b)所示; 当通道宽度足以容纳多个行人并排通过时, 行人之间的并排、斜列、直列多种排列形式均会出现, 如图4(c)所示. 图4(b)和图4(c)是典型拉链现象的表现形式.
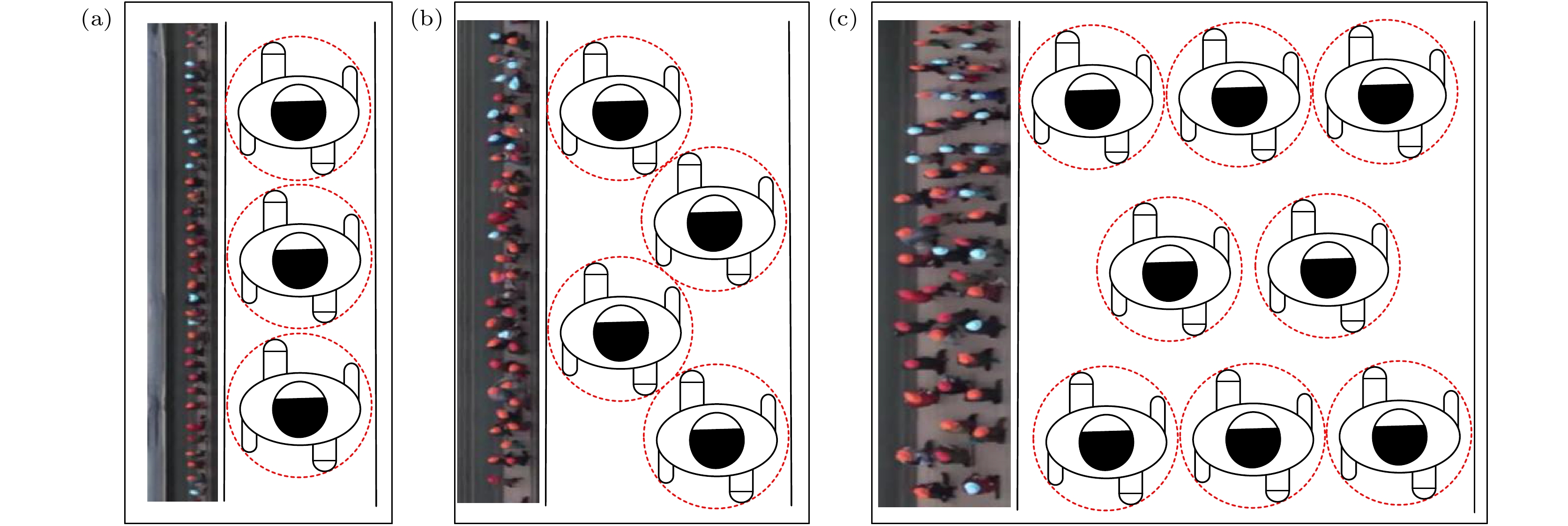 图 4 行人拉链现象表现形式 (a)单列行人截图[33]与行人直列形式对比; (b)两列行人截图[33]与行人直列、斜列形式对比; (c)多列行人截图[33]与行人多种排列形式对比
图 4 行人拉链现象表现形式 (a)单列行人截图[33]与行人直列形式对比; (b)两列行人截图[33]与行人直列、斜列形式对比; (c)多列行人截图[33]与行人多种排列形式对比Figure4. Manifestation of pedestrian zipper phenomenon: (a) The comparison of single-column pedestrian screenshot[33] with pedestrians in-line pattern; (b) the comparison of two-column pedestrian screenshot[33] with pedestrians in-line and diagonal patterns; (c) the comparison of multi-column pedestrian screenshot[33] with multiple arrangement patterns of pedestrians.
2
2.3.视野最佳
行人行走时一般目视前方, 在视野后方的行人基本不会对前方行人的行为决策产生影响. 在行人有效视野范围内, 也不是所有角度和距离都会对行人产生同样的影响. 显然正前方是行人最为关注的视野区域, 对行人的行为决策影响最大; 而从中间向两侧的视野区域对行人行为决策的影响程度迅速衰减. 以图5为例, 移动行人






















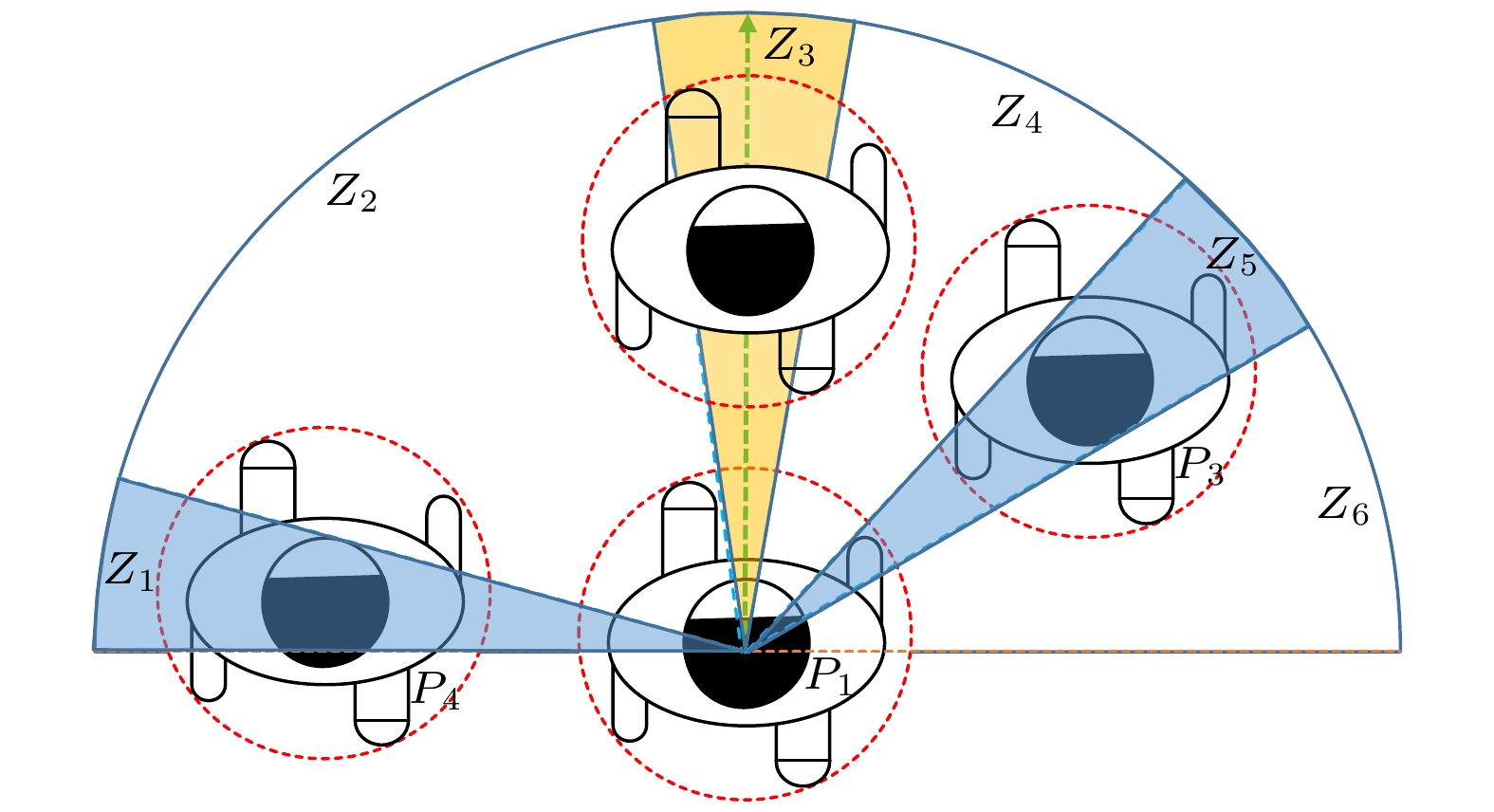 图 5 有效视野区域内的行人视野关注和遮挡(橙色遮挡区域是目标行人最为关注和对目标行人影响最大的区域, 蓝色遮挡区域对目标行人的影响较弱)
图 5 有效视野区域内的行人视野关注和遮挡(橙色遮挡区域是目标行人最为关注和对目标行人影响最大的区域, 蓝色遮挡区域对目标行人的影响较弱)Figure5. Pedestrian vision attention and occlusion in the effective vision area (the orange shaded area is the area that the target pedestrian pay the most attention to and has the greatest influence on the target pedestrian, while the blue shaded area has a relatively weak influence on the target pedestrian).
考虑视野对行人行为决策的影响, 以行人视野关注和视野遮挡描述影响行人侧向偏离的因素. 视野关注表示行人对不同视野区域的关注程度. 同时, 不同视野区域对行人行为决策的影响程度也不同. 视野遮挡表示在行人有效视野区域内, 被遮挡视野区域面积占行人有效视野区域面积的比重. 正前方区域是行人视野最为关注和对行人视野遮挡影响最大的区域.
此外, 即使是同一视野方向, 不同距离行人对目标行人视野的遮挡影响程度也不同. 距离越近, 对目标行人视野遮挡越大; 距离越远, 对目标行人视野遮挡度越小. 以图6为例, 行人














 图 6 不同距离行人对目标行人视野的遮挡程度
图 6 不同距离行人对目标行人视野的遮挡程度Figure6. Occlusion degree of the target pedestrian’s vision by surrounding pedestrians at different distances
2
2.4.步行舒适
当通道宽度足以容纳多个行人通过时, 在观察行人拉链现象过程中, 可以引入行人局部密度, 描述行人的步行舒适度. 在Voronoi图中, 假设行人


 图 7 不同行人局部密度下的拉链现象示意(绿色、黄色、橙色分别表示行人局部密度由低到高) (a)行人局部密度较低时; (b)行人局部密度较高时
图 7 不同行人局部密度下的拉链现象示意(绿色、黄色、橙色分别表示行人局部密度由低到高) (a)行人局部密度较低时; (b)行人局部密度较高时Figure7. The zipper phenomenon of pedestrians under different local density (green, yellow and orange respectively represent the local pedestrian density from low to high):(a) When the local pedestrian density is relatively low; (b) when the local pedestrian density is relatively high.
同时, 行人是否会进行侧向偏移还与自身的主客观偏离意愿和习惯有关. 以图8为例, 当通道宽度正好可以允许两个行人并排通过时, 若行人的偏离意愿程度较低, 行人之间有可能形成规则形状的直列, 如图8(a)所示; 当通道宽度不足以允许两个行人并排通过时, 若行人的偏离意愿程度较高, 行人之间会自发形成不规则形状的拉链, 如图8(b)所示; 当通道宽度可以允许多个行人并排通过时, 若行人的偏离意愿程度较高, 行人在潜意识驱动下会自发进行侧向偏离, 追求更宽广的可见视野和步行舒适度, 形成典型的拉链现象, 如图8(c)所示.
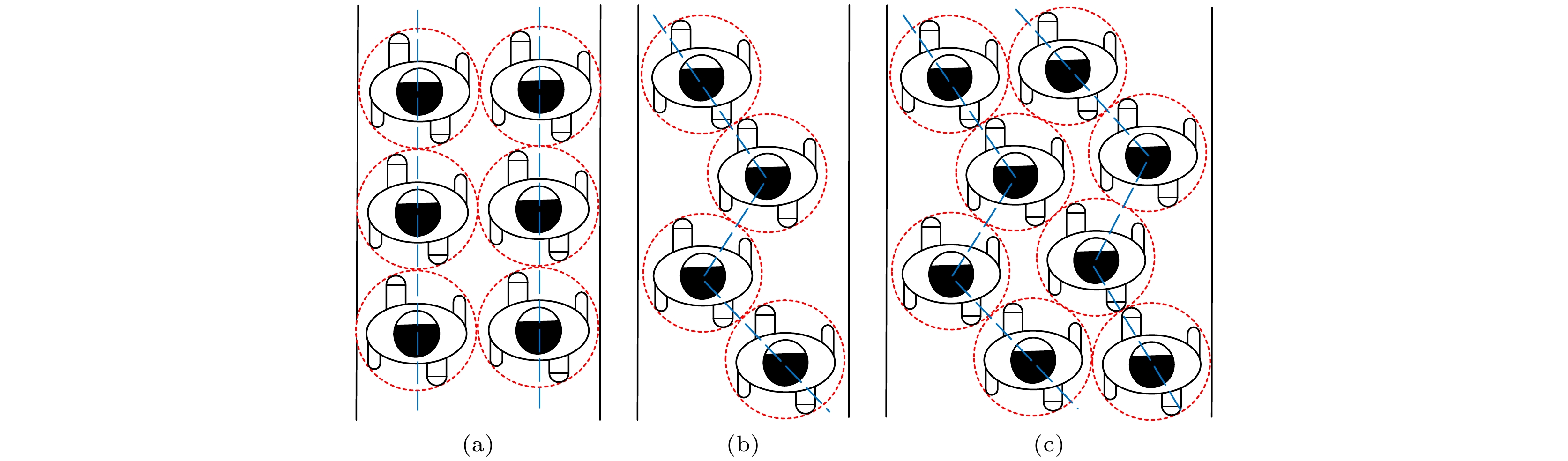 图 8 不同偏离意愿下的拉链现象示意 (a)窄通道行人偏离意愿较低时; (b)窄通道行人偏离意愿较高时; (c) 宽通道行人偏离意愿较高时
图 8 不同偏离意愿下的拉链现象示意 (a)窄通道行人偏离意愿较低时; (b)窄通道行人偏离意愿较高时; (c) 宽通道行人偏离意愿较高时Figure8. Zipper phenomenon of pedestrians under different deviation intentions: (a) When the deviation intention of pedestrians in narrow corridors is relatively low; (b) when the deviation intention of pedestrians in narrow corridors is relatively high; (c) when the deviation intention of pedestrians in wide corridors is relatively high.
在行人追求视野最佳和步行舒适, 处于比较稳定的拉链效应状态时, 可以发现目标行人与周围行人会形成类似蜂巢的排列, 与视野前方行人形成类似等边三角形的形态, 如图9所示[33]. 处于稳定状态的行人, 占用较少的空间, 拥有较好的视野、个人舒适度和移动速度. 在现有行人仿真中, 也有****采用蜂巢形态作为行人个体的稳定形态[34]. 以图10为例, 当行人之间彼此相切啮合, 相邻的3个行人形成夹角为

 图 9 行人拉链效应的稳定形态[33]
图 9 行人拉链效应的稳定形态[33]Figure9. Stable form of pedestrian zipper effect[33].
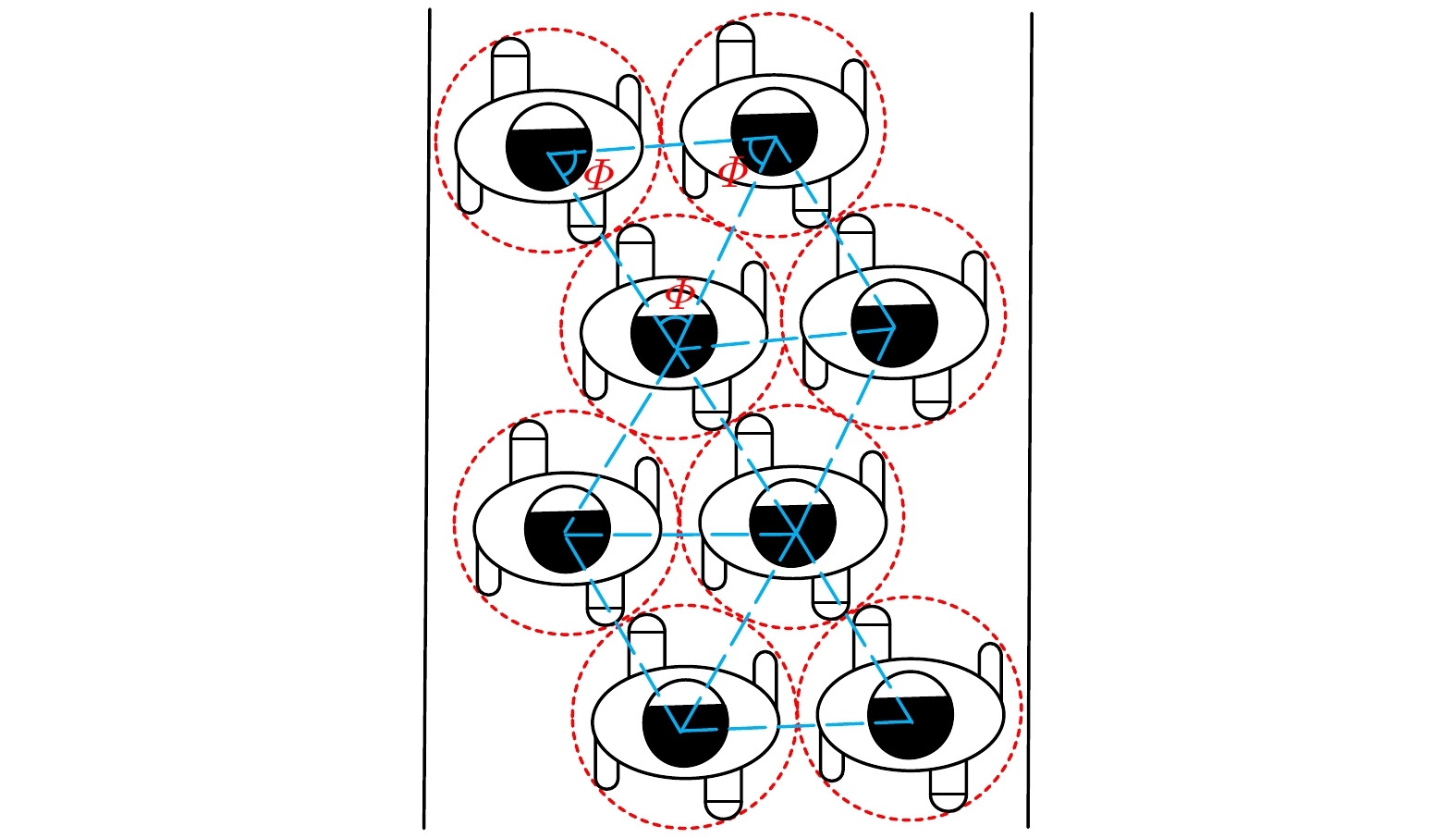 图 10 行人拉链效应的最佳形态
图 10 行人拉链效应的最佳形态Figure10. The best form of pedestrian zipper effect.
2
2.5.偏移机制
通过观察, 分析行人追求视野最佳和步行舒适形成拉链现象的行为机制. 假设不考虑行人个体和主观偏移意愿的差异, 认为行人均有主观偏移意愿. 当通道宽度足够容纳多个行人并肩通过且行人整体密度较大时, 行人会呈现各种排列形式. 其中, 斜列形式在一定程度上是行人侧向偏移的结果, 是行人拉链现象的主要表现形式. 在行人行走过程中, 若前方行人阻挡了后方行人的视野和道路, 会影响和限制后方行人行走的舒适度和步行速度. 此时, 为了追求更好的可见视野和行走舒适度, 后方行人会进行侧向偏移, 形成斜列形式.以3个毗邻行人作为基本研究单元, 当行人处于图10所示的视野最佳和步行舒适的拉链稳定状态时, 在有效可见距离L内, 在目标行人正前方视野遮挡下, 行人可获得的最佳可见关注视野为




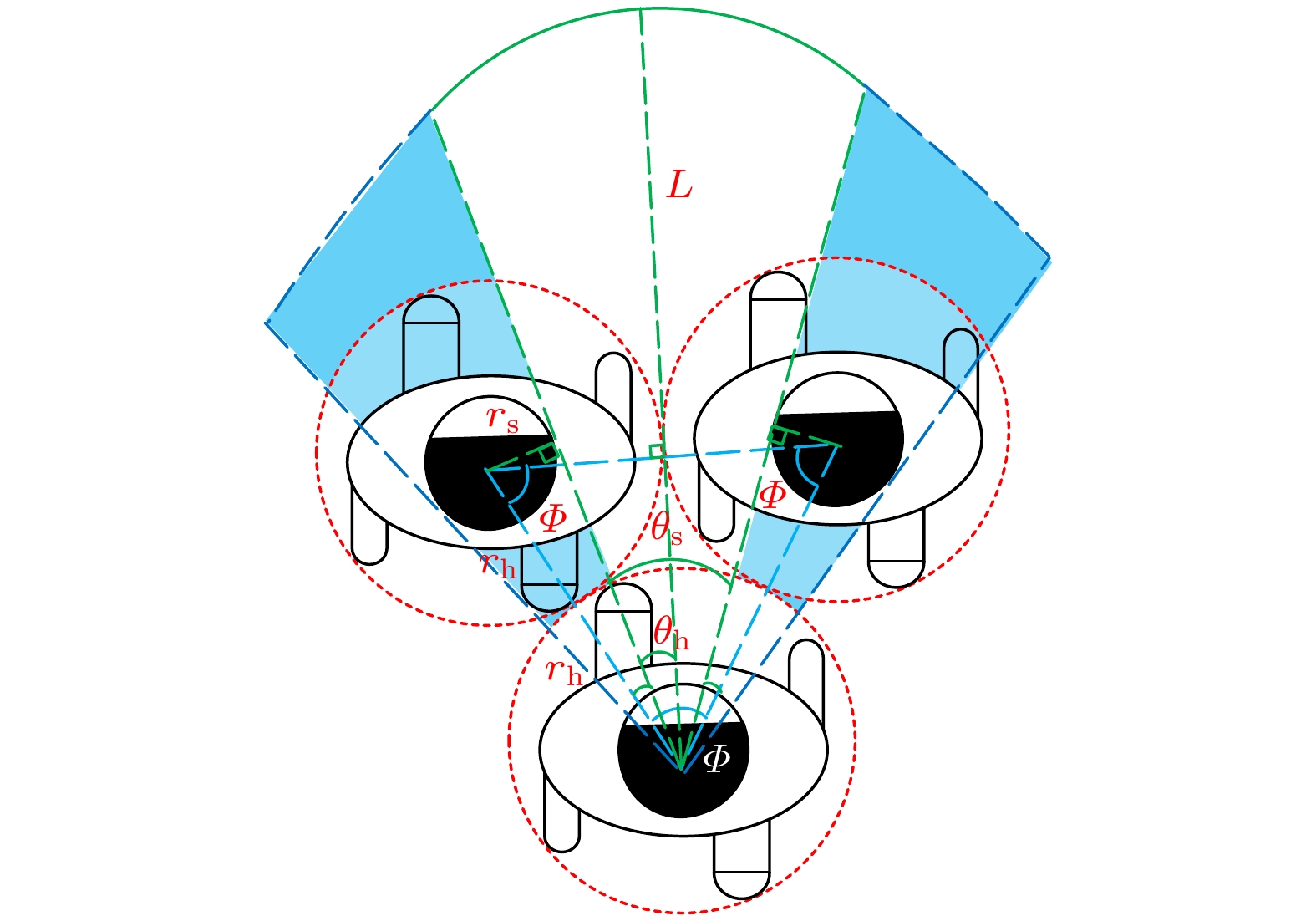 图 11 行人基本单元的拉链稳定状态(阴影区域为目标行人正前方视野遮挡区域, 非阴影区域为目标行人有效可见视野区域)
图 11 行人基本单元的拉链稳定状态(阴影区域为目标行人正前方视野遮挡区域, 非阴影区域为目标行人有效可见视野区域)Figure11. Zipper stability state of pedestrian basic unit (the shadow area is the vision occlusion area and the non-shaded area is the effective visible area in front of the target pedestrian).








根据研究数据[35]和日常观察, 行人的投影形状接近于椭圆, 如图12所示. 在传统的行人仿真中, 行人原椭圆投影区域通常以圆表示, 且它们的投影面积基本相等. 本文将行人椭圆形的投影区域转换为圆形区域, 根据人体尺寸相关数据[35], 可近似得到行人头部半径和行人半径:
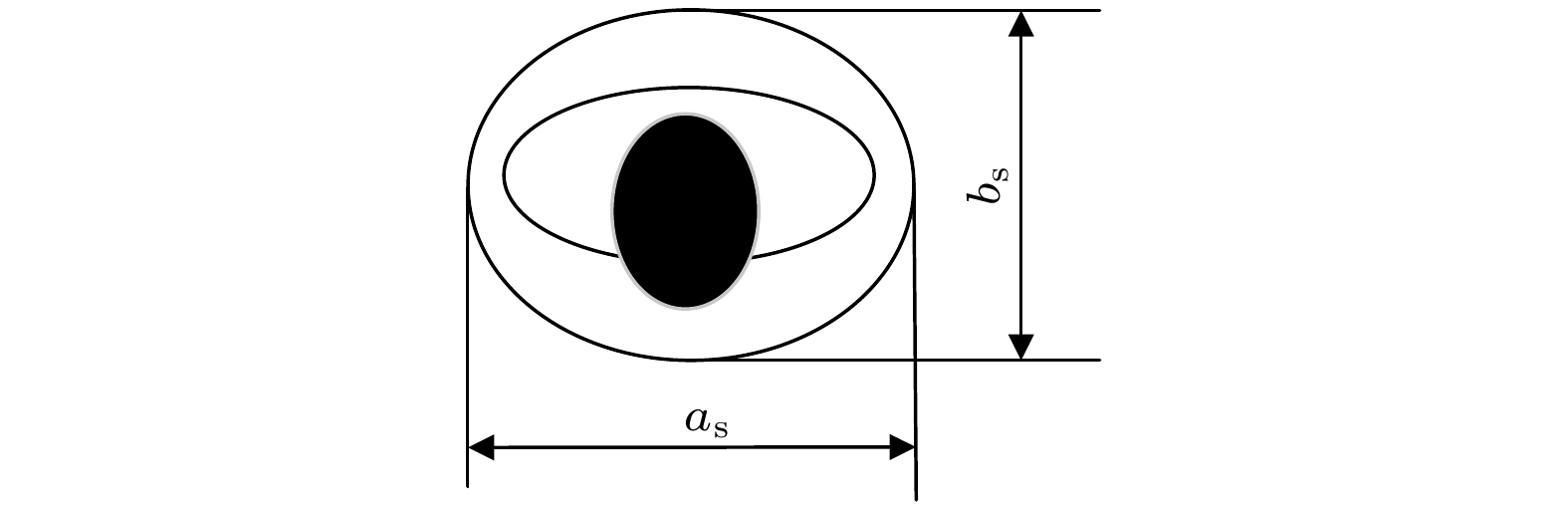 图 12 行人投影区域
图 12 行人投影区域Figure12. Projection area of pedestrians.





为了方便描述行人的偏移机制, 设定目标行人





































 图 13 行人拉链效应启动机制示意 (a)行人侧向位移前; (b)行人侧向位移后
图 13 行人拉链效应启动机制示意 (a)行人侧向位移前; (b)行人侧向位移后Figure13. Starting mechanism of pedestrian zipper effect: (a) Before lateral displacement of pedestrians; (b) after lateral displacement of pedestrians.
在图13中, 目标行人只考虑了视野范围内距离自己最近的一个行人, 且符合拉链效应启动条件, 然后进行侧向偏移的情况, 但是目标行人也需要处理视野范围内同时面对两侧都有行人的情况, 因此需要进一步研究. 以图14为例, 目标行人




















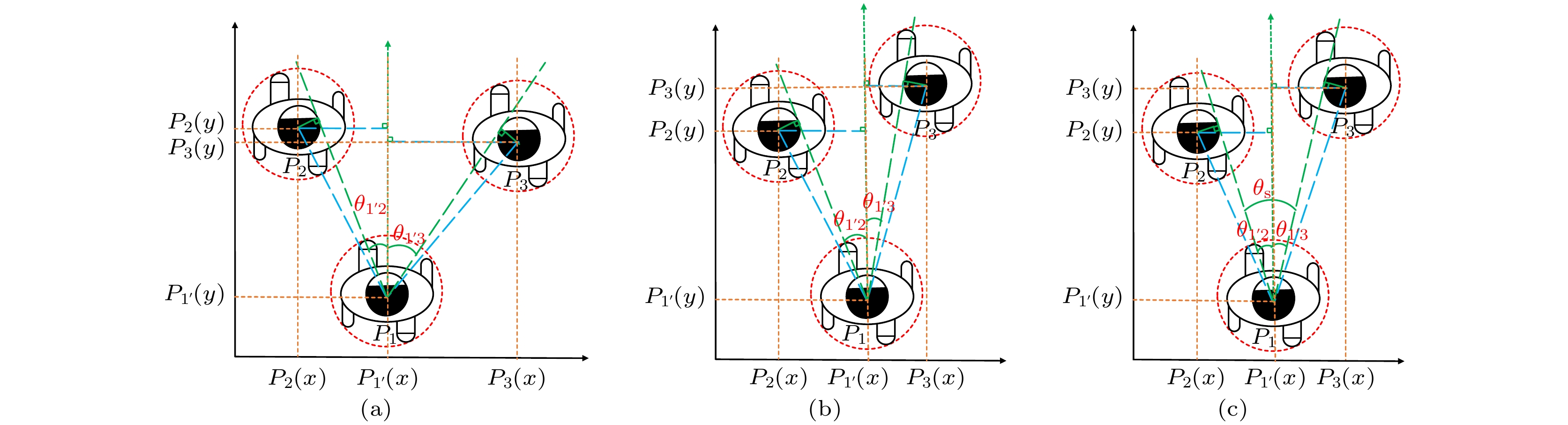 图 14 考虑两侧多个行人的拉链效应偏移情况示意 (a)两侧均满足最佳视野; (b)仅一侧满足最佳视野; (c)两侧妥协后稳定视野
图 14 考虑两侧多个行人的拉链效应偏移情况示意 (a)两侧均满足最佳视野; (b)仅一侧满足最佳视野; (c)两侧妥协后稳定视野Figure14. Deviation of zipper effect when consider multiple pedestrians on both sides: (a) Both sides meet the optimum field of vision; (b) only one side satisfies the optimal field of vision; (c) stabilize visual field after compromise on both sides.
参照图14(a)的情况, 若目标行人




















3.1.速度修正
行人在正常行走时, 以接近匀速的状态移动. 社会力影响行人行走的本质是影响行人的速度变化, 进而影响行人的位移变化; 而传统的社会力模型更适合仿真拥挤状态下的行人相互作用, 在仿真正常状态下的行人移动时, 会出现不合理的行人现象[16,27,28,36]. 为了克服传统社会力模型在仿真正常状态下行人流的一些不足, 简化模型参数校定的复杂性和不准确性, 克服行人仿真重叠性和跳动性的问题, 提出了一种综合考虑行人视野范围内周围不同方向和距离行人或障碍物对目标行人速度影响的速度修正模型, 适合仿真正常行走状态下的行人流.通常在目标行人视野前方一定范围内的周围行人会对目标行人的行走决策产生影响, 而目标行人视野后方的周围行人对目标行人的影响较小, 且视野前方不同方向和距离的周围行人对目标行人行走速度的影响各不相同. 结合Voronoi图的几何特性, 可以有效得到目标行人






















 图 15 周围行人对目标行人的速度影响
图 15 周围行人对目标行人的速度影响Figure15. Velocity effects of surrounding pedestrians on the target pedestrian.
周围行人对目标行人速度的影响除了与目标行人的相对距离有关, 也和周围行人相对目标行人移动方向的角度有关. 如, 在







基于速度修正描述影响行人移动的心理趋势和物理行为, 本文提出一种速度修正模型. 设定行人在正常移动时主要受自驱动速度、周围行人和障碍物排斥速度的影响. 自驱动速度提供行人前进的速度, 表示行人按照期望速度前进的愿望; 排斥速度表示行人受周围行人和障碍物的排斥心理. 该模型将行人的移动看成每单位时间步的匀速运动, 计算行人在不同速度影响下的位置更新过程为







































| 参数 | 取值 | 单位 | 参数 | 取值 | |
| ${v_0}$ | 1 | ${\rm{m/s}}$ | ${k_1}$ | 1 | |
| ${r_i}$ | 0.3 | ${\rm{m}}$ | ${k_2}$ | 0.6 | |
| ${d_1}$ | 0 | ${\rm{m}}$ | ${k_3}$ | 0.2 | |
| ${d_2}$ | 0.5 | ${\rm{m}}$ | ${k_4}$ | 0 | |
| ${d_3}$ | 0.25 | ${\rm{m}}$ | ${k_5}$ | 0.8 | |
| $\Delta t$ | 0.5 | ${\rm{s}}$ | ${k_6}$ | 0 |
表1速度修正模型参数取值
Table1.Parameter values of velocity correction model.
2
3.2.偏移规则
为了真实再现人群的拉链现象, 考虑行人视野最佳和步行舒适的需求, 结合速度修正模型, 制定行人拉链效应的侧向偏移规则, 如图16所示. 图 16 行人拉链效应偏移规则流程图
图 16 行人拉链效应偏移规则流程图Figure16. Flow diagram of pedestrian zipper effect deviation rules.
首先, 考虑行人是否有进行拉链效应的主观偏移意愿, 因为各种因素影响, 行人有时会做出非理性的行为. 若行人主观意愿

其次, 若目标行人有进行主观偏移的意愿, 且符合行人进行客观偏移的条件, 即符合(7)式的拉链效应启动条件



然后, 根据目标行人












以图17为例, 示意有主动偏移意愿的目标行人



 图 17 有偏移速度的行人侧向偏移示意
图 17 有偏移速度的行人侧向偏移示意Figure17. Sideways deviation of pedestrians with deviation velocity.
2
4.1.通道循环流
在10 m × 3.5 m的直通道走廊场景中进行行人单向循环流仿真实验, 验证模型的可靠性. 走廊下端是行人的产生区域, 上端是出口, 在走廊起始端2 m × 3.5 m的范围内随机生成20个行人, 行人向出口移动. 在实验中, 行人采用的是周期性循环流, 行人从走廊下端进入并从上端离开后, 从下端重新进入走廊; 走廊的左右边界采用的是封闭性实体边界, 上下两端采用的是开放性截断边界. 采用开放性截断边界时, 在走廊上下端边缘处行人的Voronoi元胞, 首先基于开放性边界生成被截割的Voronoi元胞, 然后利用上下端的边界将其截割, 从而生成适应边界的新Voronoi边和点[27].设定所有行人都有进行偏移的主观意愿

 图 18 直通道行人循环流仿真过程截图(
图 18 直通道行人循环流仿真过程截图(


Figure18. Screenshot of simulation process of pedestrian flow in the straight corridor (



以行人#4为例, 可以看到在不同仿真时间步, 行人#4进行了明显的拉链效应偏移, 以获得更好的视野和步行舒适度, 如图19所示.
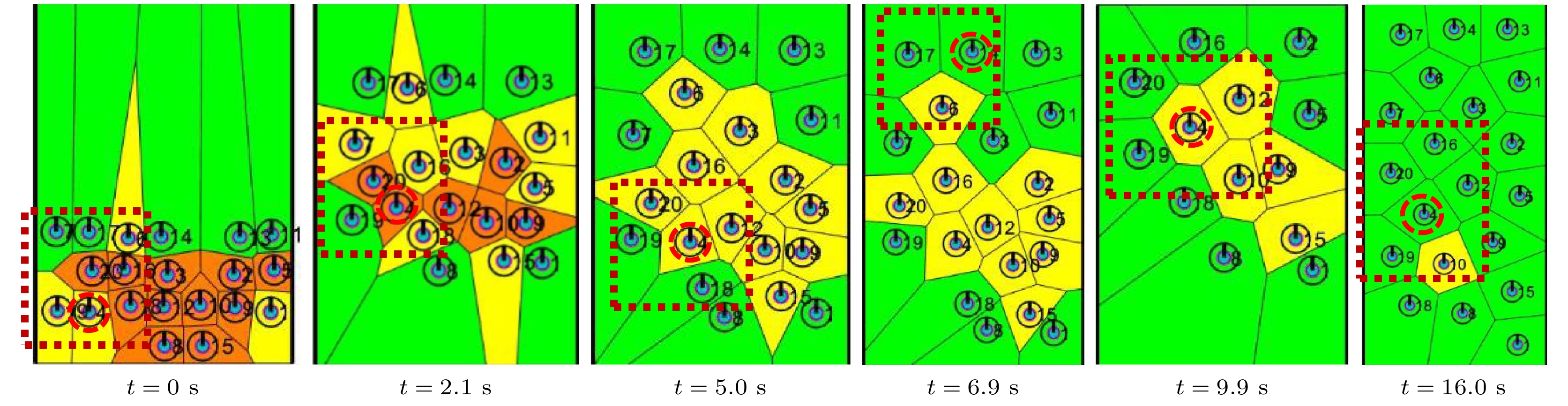 图 19 行人#4在不同仿真时间步的拉链效应偏移截图
图 19 行人#4在不同仿真时间步的拉链效应偏移截图Figure19. Screenshot of zipper effect of pedestrian #4 at different simulation time steps.
2
4.2.对比分析
在直通道中随机产生20个行人, 随着通道宽度
 图 20 行人拉链层数与通道宽度关系
图 20 行人拉链层数与通道宽度关系Figure20. Relationship between the number of pedestrian zipper layers and the width of the corridor.
为了获得行人速度与密度的关系, 对不同密度条件下(人/m2)的行人进行单向循环流仿真, 并通过基本图验证模型的可靠性. 在每个行人密度点的仿真实验中, 最开始行人随机地分布于走廊中, 行人的目标点位于走廊上端, 每次仿真实验重复10次, 每次持续90个仿真时间步, 实验的前30个仿真时间步当做热身时间, 后60个仿真时间步的数据用于统计分析. 图21将速度修正模型与其他实证研究的数据进行了对比, 可以发现速度修正模型的速度-密度关系与实证数据符合得较好[37-41].
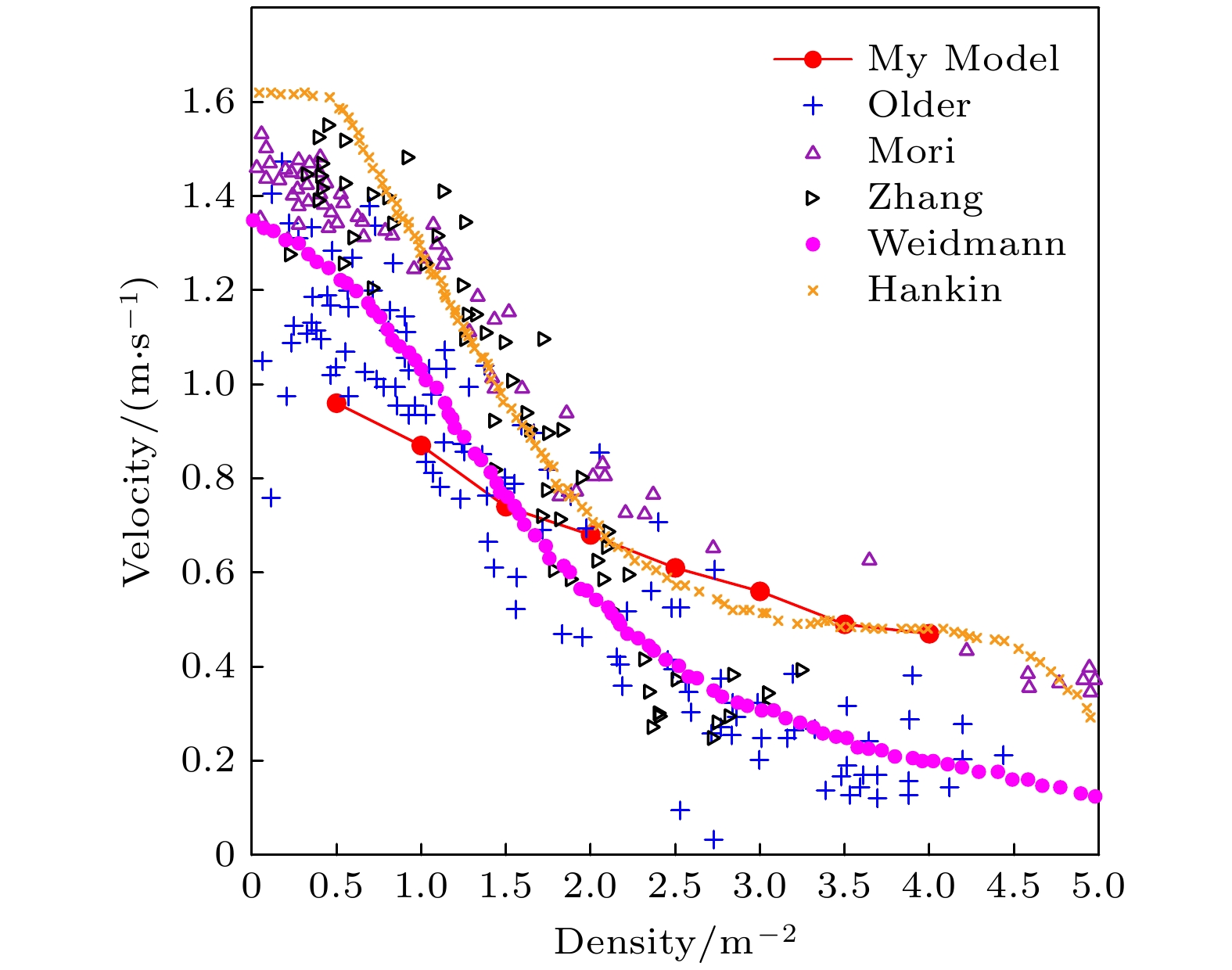 图 21 直通道单向行人流基本图[37-41](该模型仿真数据与实证数据(Older[37], Mori[38], Zhang[39], Weidmann[40], Hankin[41])进行对比)
图 21 直通道单向行人流基本图[37-41](该模型仿真数据与实证数据(Older[37], Mori[38], Zhang[39], Weidmann[40], Hankin[41])进行对比)Figure21. Fundamental diagram of unidirectional pedestrian flow in the corridor[37-41]. Actual data (Older[37], Mori[38], Zhang[39], Weidmann[40], Hankin[41]) are gathered to compare with our model.
通过改变行人拉链效应主观偏移意愿与无偏移意愿的占比

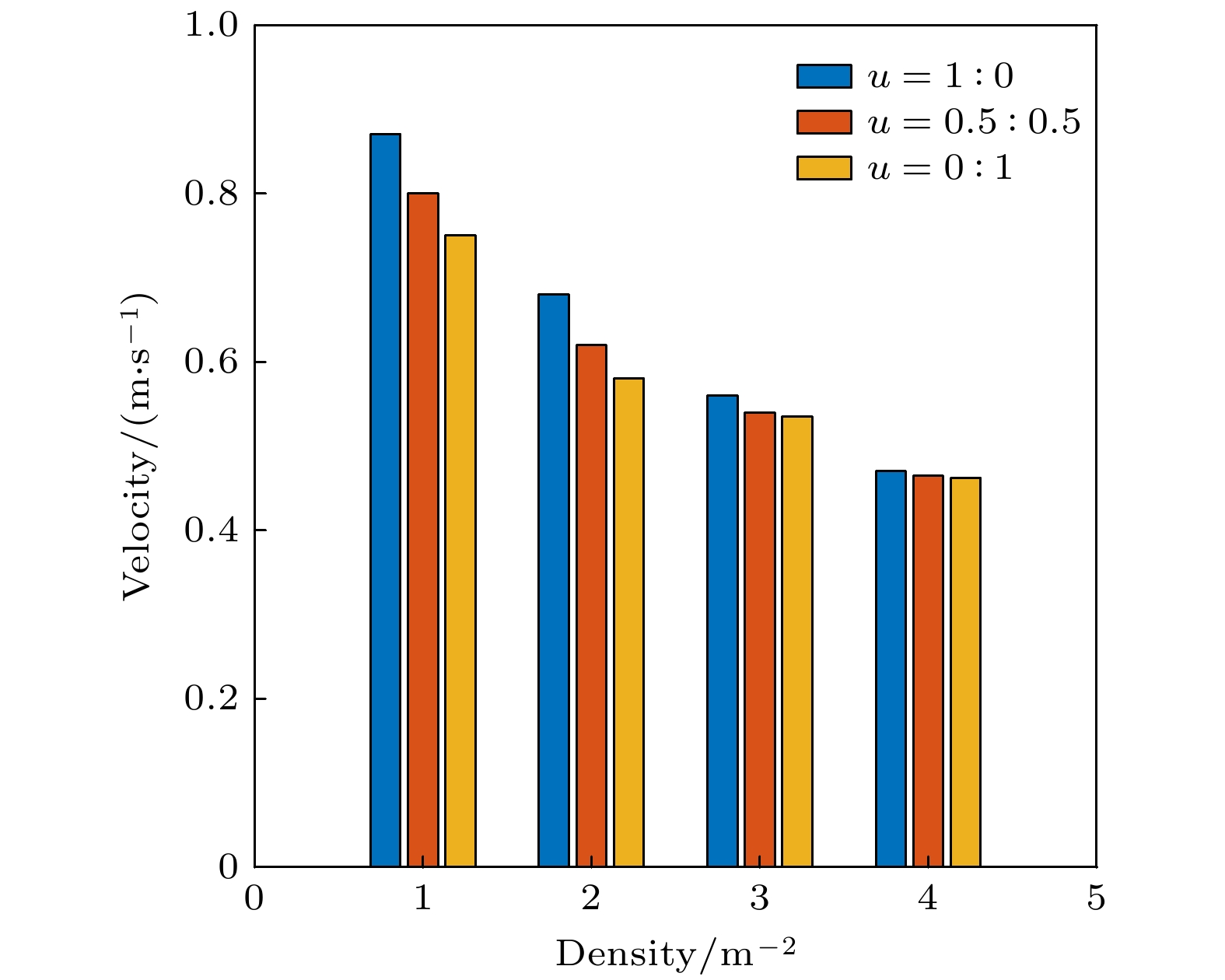 图 22 不同密度下行人主观偏移意愿占比与行人平均速度关系
图 22 不同密度下行人主观偏移意愿占比与行人平均速度关系Figure22. Relationship between the proportion of pedestrian subjective deviation intention and pedestrian average velocity under different overall densities.
 图 23 不同密度下行人主观偏移意愿占比与行人平均局部密度关系
图 23 不同密度下行人主观偏移意愿占比与行人平均局部密度关系Figure23. Relationship between the proportion of pedestrian subjective deviation intention and pedestrian average local density under different overall densities.
同时, 为验证Voronoi图划分对模型仿真效率的影响, 仅分析了针对Voronoi图划分所需要的时间. 在Win7 64位操作系统, 酷睿双核i7-6700 CPU 3.4 GHz, 16G内存的台式电脑上, 基于Matlab R2018b的编程环境, 通过仿真计算了Voronoi图划分所需的时间. 对20人的Voronoi图划分, 需要0.499254 s; 对200人的Voronoi图划分, 需要0.992942 s; 对1000人的Voronoi图划分, 需要4.952742 s; 对10000人的Voronoi图划分, 需要755.423851 s. 通过实际的计算时间可以看出: 当行人数量较少时, Voronoi图划分耗时在可承受的范围之内; 当行人数量较大时, Voronoi图划分耗时急剧增长. 因此, 为了减少Voronoi图划分耗时对模型仿真效率的影响, 为了提高基于Voronoi图模型整体的仿真效率, 使其适用于大规模行人的仿真, 需要进一步研究并行环境下模型的仿真计算, 包括基于空间分割、基于仿真规则、基于进程的并行计算等.
