全文HTML
--> --> -->大多数柔性电子传感器设备都依赖于外部供能, 例如通过导线连接到外部电源, 或者通过射频天线进行无线供能[34], 但或多或少都受到外部供能设备的限制, 难以独立、稳定、无物理束缚地进行工作. 在部分研究中集成于器件中的微型锂电池[26]等储能设备也被用于为器件供电, 但需要以牺牲其体积和部分轻便性为代价. 为解决柔性电子器件自供能的问题, 热电(pyroelectric)、摩擦电(triboelectric)与压电(piezoelectric)纳米发电等微观能量收集机理成为可为柔性电子设备内部供能的最具发展潜力的选项. 其中, 压电纳米发电机(piezoelectric nanogenerator, PENG)与摩擦电纳米发电机(triboelectric nanogenerator, TENG)能够将日常生活中随处可见但又被大量浪费的机械能转化为电能输出, 因此将PENG, TENG与皮肤电子结合[35,36], 使可穿戴、无需外部供电的自供能柔性皮肤电子器件成为可能.
压电材料将压力传化为电能的原理是正压电效应, 可由压电本构方程[37]描述:


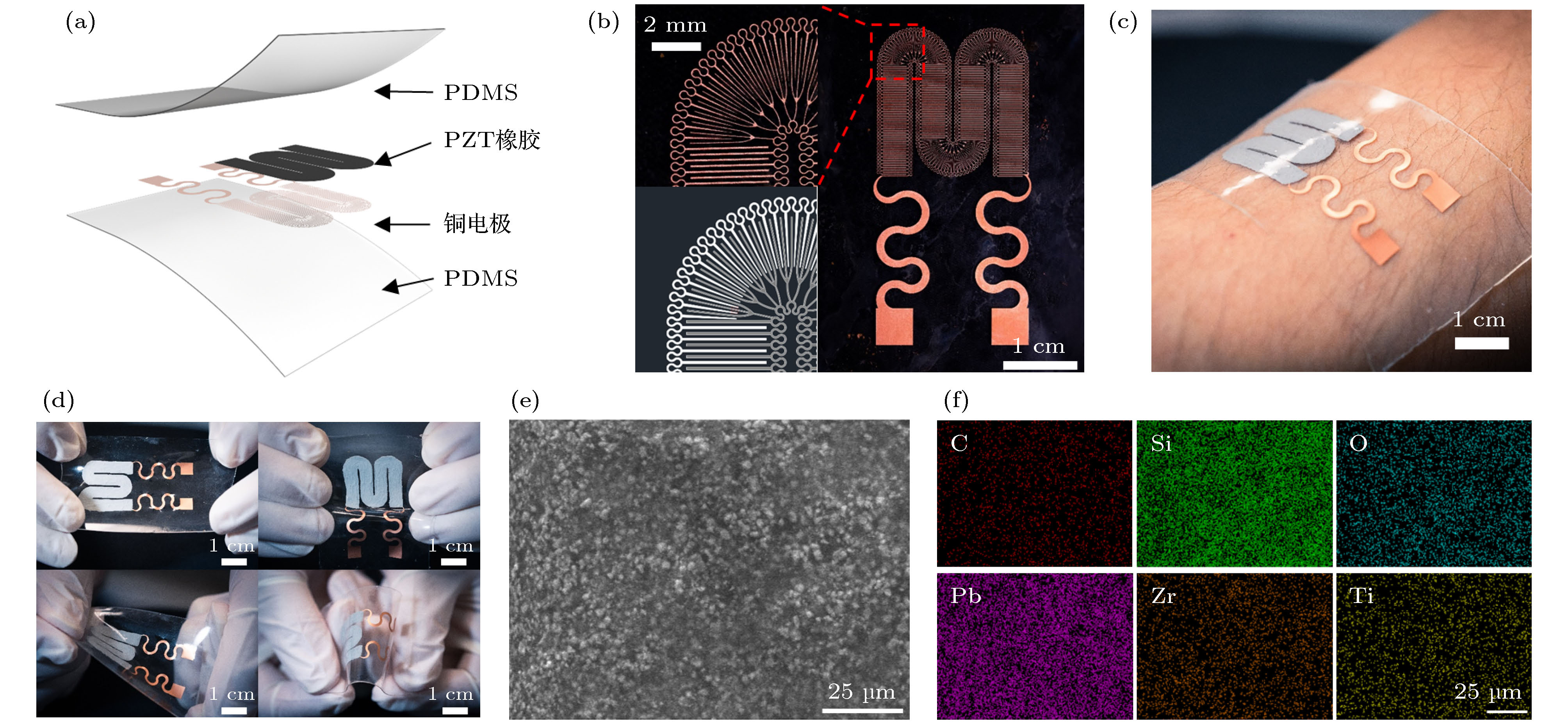 图 1 柔性压电皮肤电子器件 (a) 器件结构图; (b) 蛇纹线结构叉指电极整体、细节及其设计图; (c) 器件贴于皮肤表面的照片; (d) 对器件分别进行纵向、横向拉伸及扭转、弯曲变形的照片; (e) 三元压电橡胶表面形貌的SEM图像; (f) SEM图像范围内C, Si, O, Pb, Zr, Ti元素的能量色散X射线EDX分布图
图 1 柔性压电皮肤电子器件 (a) 器件结构图; (b) 蛇纹线结构叉指电极整体、细节及其设计图; (c) 器件贴于皮肤表面的照片; (d) 对器件分别进行纵向、横向拉伸及扭转、弯曲变形的照片; (e) 三元压电橡胶表面形貌的SEM图像; (f) SEM图像范围内C, Si, O, Pb, Zr, Ti元素的能量色散X射线EDX分布图Figure1. The flexible piezoelectric epidermal electronic device: (a) Explosive view of the structure of the device; (b) overall and detailed photos of the serpentine structured interdigital electrodes and the design; (c) photograph showing the device attached to the skin; (d) photographs showing the device under longitudinal and latitudinal stretching, twisting and bending, respectively; (e) the SEM image of the surface morphology of the graphene/PZT/PDMS ternary piezoelectric rubber; (f) energy dispersive X-ray spectroscopy (EDX) images illustrating the distribution of C, Si, O, Pb, Zr and Ti.
第二步是器件的组装过程. 首先将作为硬基底板的石英玻璃片分别用丙酮、乙醇和去离子水清洗表面. 烘干之后将按ω(PDMS硅油)∶ω(交联剂) = 30∶1配好的PDMS前体旋涂于玻璃片表面(600 r/min, 30 s)使其形成PDMS薄膜, 并将其放在真空箱中抽真空20 min直到气泡消失. 最后在鼓风干燥箱中在70 ℃加热40 min形成固化后的PDMS膜, 作为与人体皮肤接触的软基底界面. 紧接着将厚度为5 μm的铜片平整地贴在PDMS薄膜上, 用丙酮和去离子水清洁其表面并烘干. 在铜片表面上旋涂(3000 r/min, 30 s)一层正性光刻胶(AZ 5214, AZ Electronic Materials), 并在110 ℃进行前烘3 min. 随后用紫外深度光刻机(URE-2000/35 AL, 中国科学院光电技术研究所)对器件表面的光刻胶曝光45 s, 使其形成设计好的几何图案. 曝光后用显影液(AZ 300MIF)进行显影, 仅留下蛇纹线叉指电极图案的光刻胶覆盖于铜片表面, 并在110 ℃进行后烘3 min使其完全固化. 用三氯化铁(FeCl3)溶液刻蚀除去未被光刻胶覆盖的铜片区域, 并将剩余的光刻胶用丙酮溶液溶解除去. 清洗并烘干后, 具有蛇纹线结构的叉指铜电极已制备于柔性基底上. 将已经研磨充分的石墨烯压电橡胶前体用丝网印刷的方式均匀涂抹在蛇纹线结构的铜电极区域并加热固化. 最后在电子器件上封装一层PDMS(交联剂质量比为10∶1)薄膜并将其固化. 在封装好的压电皮肤电子器件两电极间施加32 V的直流电压, 并在85 ℃条件下对石墨烯压电橡胶进行极化30 min. 至此, 已制作完成厚度仅为400 μm的柔性压电皮肤电子器件.
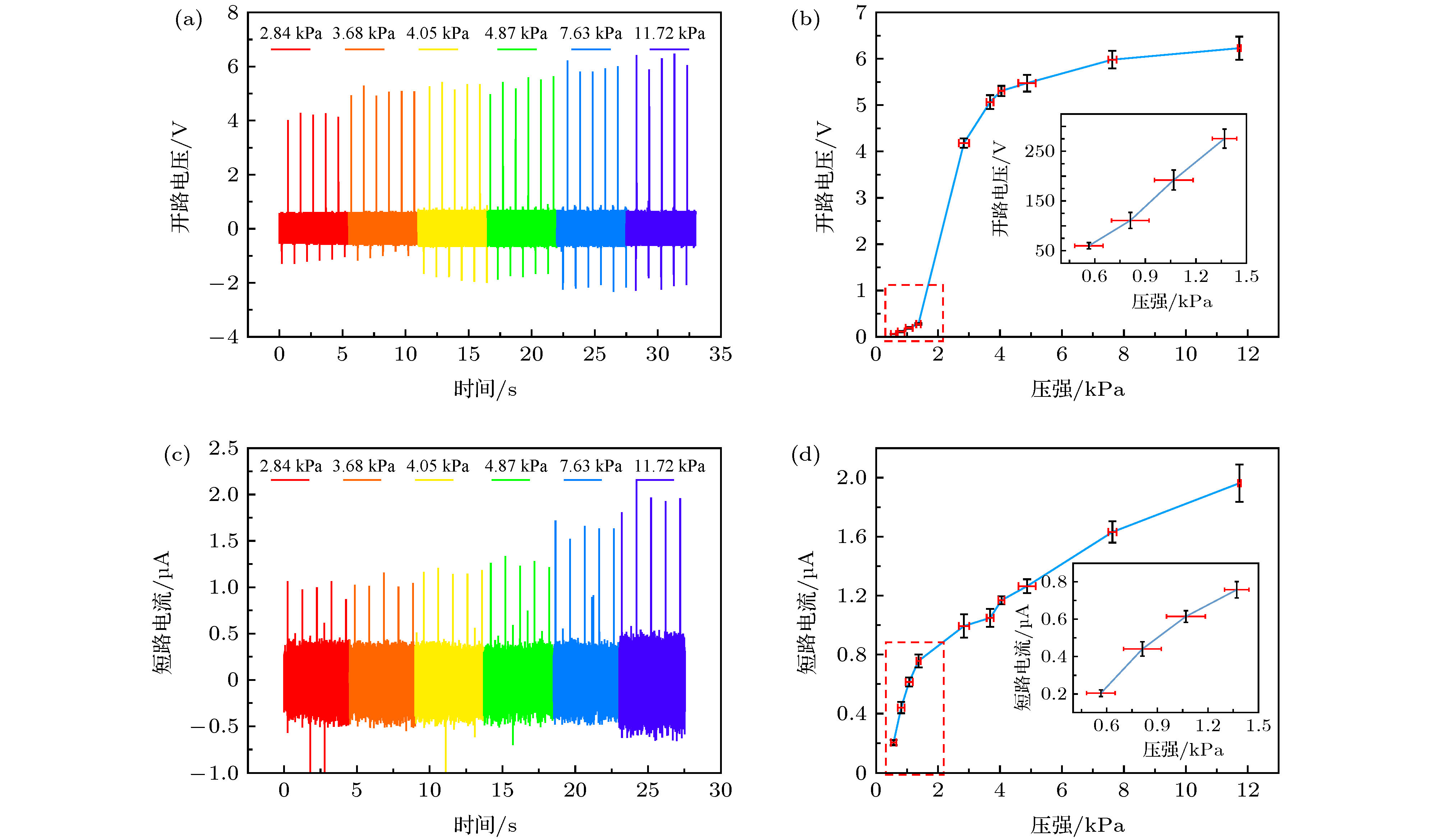 图 2 压电器件在1 Hz撞击频率下随撞击压力变化的电学性能 (a) 不同撞击压力下开路电压输出的实时测量值; (b) 以压力为变量的开路电压平均峰值曲线, 内插图为1 kPa及以下的小数量级压力下(虚线框内部分)的开路电压输出曲线放大图; (c) 不同撞击压力下短路电流输出的实时测量值; (d) 以压力为变量的短路电流平均峰值曲线, 内插图为1 kPa及以下的小数量级压力下(虚线框内部分)的短路电流输出曲线放大图
图 2 压电器件在1 Hz撞击频率下随撞击压力变化的电学性能 (a) 不同撞击压力下开路电压输出的实时测量值; (b) 以压力为变量的开路电压平均峰值曲线, 内插图为1 kPa及以下的小数量级压力下(虚线框内部分)的开路电压输出曲线放大图; (c) 不同撞击压力下短路电流输出的实时测量值; (d) 以压力为变量的短路电流平均峰值曲线, 内插图为1 kPa及以下的小数量级压力下(虚线框内部分)的短路电流输出曲线放大图Figure2. Electrical performance of the piezoelectric device with varying applied pressure under a hitting frequency of 1 Hz: (a) Real-time measured open-circuit voltage output under varying applied pressure; (b) average peak open-circuit voltage as a function of pressure (inset: OC voltage output at about 1 kPa pressure and below); (c) real-time measured short-circuit current output under varying applied pressure; (d) average peak short-circuit current as a function of pressure (inset: SC current output at about 1 kPa pressure and below).
在电学性能显著提升的同时, 本文的柔性压电皮肤电子器件在力学性能上也有优化改进. 现有的柔性压电器件多采用整体大面积的金属电极与“三明治”夹层结构[41-43], 仅能进行面外弯曲变形, 而面内的直线叉指金属电极结构设计[44,45]也基本不具备延展能力(例如金的弹性应变极限仅0.3%). 如图1(b)所示, 该器件的面内双电极采用横向的蛇形整体形状轮廓, 叉指间内部连接则采用纵向蛇纹线设计, 以整体与细节结合的蛇纹线图案设计并结合可延展功能材料的方式实现纵向与横向的可拉伸性. 变形过程中, 蛇形导线通过几何结构展开提供器件的可延展性, 同时保证了高电学性能、易微加工性. 通过系统的力学设计将进一步提高整体器件的可延展性, 这也是本项研究下一步的主要工作. 为测试该器件在不同拉伸应变下的电学性能, 将器件工作区域(石墨烯压电橡胶区域)以人体皮肤日常活动中的典型应变程度[46] (0, 5%, 10%, 15%, 20%)进行拉伸, 并贴于人造皮肤组织(PDMS, 500 kPa, 750 mm × 500 mm × 5 mm)上, 以固定频率(4.2 Hz)和压力((23.17 ± 1.76) kPa)敲击器件工作区域, 并测量记录其实时开路电压数值. 在纵向拉伸情况下, 实验结果如图3(a)和图3(b)所示. 在0, 5%, 10%, 15%, 20%的纵向拉伸应变下, 其输出开路电压平均峰值分别为10.97 ± 0.22, 10.61 ± 0.49, 10.64 ± 0.37, 9.56 ± 0.24和(9.09 ± 0.44) V. 由图3(b)柱状图可明显看出, 在纵向拉伸应变 ≤ 10%时, 其输出电压峰值基本不受影响, 能够稳定保持在10 V以上; 而当纵向拉伸应变 ≥15%时, 由于电极叉指间距增大, 由于敲击引起的压电橡胶形变程度降低, 其电压峰值略有衰减. 在应变达到20%(约为日常活动中最大程度的皮肤应变)时, 其开路电压峰值约为无拉伸状况下的82.86%, 仍能够保持较高水平的电压输出. 而在横向拉伸情况下的实验结果如图3(c)和图3(d)所示, 当横向拉伸应变为0, 5%, 10%, 15%, 20%时, 其输出开路电压平均峰值分别为11.04 ± 0.20, 10.64 ± 0.31, 10.40 ± 0.32, 9.41 ± 0.34和(8.99 ± 0.07) V. 可以看出, 横向拉伸情况下的电学性能与纵向拉伸情况下总体趋势非常接近, 在横向拉伸应变 ≤ 10%时其开路电压输出大小能保持在无拉伸情况时的94.20%以上, 而在20%的横向应变情况下也仍能达到81.43%. 整体而言, 横向拉伸时该器件的开路电压输出幅值较纵向拉伸而言衰减速度略快一些, 但该器件在两个方向的拉伸应变达到20%时仍能够保持无拉伸状况时80%以上的电能输出, 证明柔性压电皮肤电子器件能够良好适应人体皮肤在日常活动中产生的各种形变, 并保持电学性能相对稳定.
 图 3 压电器件在纵向以及横向不同拉伸应变下, 在同一撞击压力((23.17 ± 1.76) kPa)下的电学性能 (a) 纵向拉伸下的开路电压输出实时测量值; (b) 纵向拉伸下的开路电压平均峰值统计图; (c) 横向拉伸下的开路电压输出实时测量值; (d) 横向拉伸下的开路电压平均峰值统计图
图 3 压电器件在纵向以及横向不同拉伸应变下, 在同一撞击压力((23.17 ± 1.76) kPa)下的电学性能 (a) 纵向拉伸下的开路电压输出实时测量值; (b) 纵向拉伸下的开路电压平均峰值统计图; (c) 横向拉伸下的开路电压输出实时测量值; (d) 横向拉伸下的开路电压平均峰值统计图Figure3. Electrical performance of the piezoelectric device with identical applied pressure ((23.17 ± 1.76) kPa) under varying longitu-dinal and latitudinal stretching strain: (a) Real-time measured open-circuit voltage output under varying longitudinal stretching strain; (b) average peak open-circuit voltage as a function of longitudinal strain; (c) real-time measured open-circuit voltage output under varying latitudinal strain; (d) average peak open-circuit voltage as a function of latitudinal strain.
为探究该柔性压电皮肤电子器件在实际应用中的性能, 将该器件贴在一名志愿者的皮肤表面(前臂内侧), 在实际使用中测试其在不同机械刺激程度下的电学性能及分辨不同机械刺激的能力. 如图4(a)所示, 实验中用手指对贴于志愿者前臂皮肤上的器件压电橡胶涂覆区域分别进行触摸、点按、轻拍和敲击(频率均约为3 Hz) 4种不同程度的机械刺激. 当触摸器件时, 其开路电压平均峰值为(1.84 ± 0.04) V, 短路电流平均峰值为(0.36 ± 0.04) μA; 点按时分别为(4.41 ± 0.11) V, (0.55 ± 0.08) μA; 轻拍时分别为(7.61 ± 0.37) V, (0.92 ± 0.04) μA; 敲击时则分别为(12.55 ± 0.44) V和(1.17 ± 0.06) μA. 其开路电压及短路电流实时数据和统计值如图4(b)和图4(c)及图4(d)和图4(e)所示. 可以看出, 在贴于人体皮肤实际应用时该器件对于不同程度的机械刺激的电压及电流信号幅值有着相当明显的区别, 能够实时监测并清楚分辨作用于器件工作区域的不同机械刺激. 通过工作一个月后的柔性压电皮肤电子器件的触觉传感开路电压与短路电流的输出性能与初始状况(制备完成时)下的性能进行横向对比(图4(f)和图4(g)), 以测试器件的长时间工作稳定性. 测试结果表明, 经历长时间工作后的柔性压电皮肤电子器件在受到不同类型的机械刺激时的平均开路电压与短路电流峰值仍具有相同的趋势, 较初始状况下的相同类型刺激的电流/电压输出大小波动不大, 仍能清楚分辨不同类型的机械刺激, 证明该器件的长期电学稳定性良好. 同时, 作为自供能器件, 其在手指敲击刺激下的瞬时功率达到14.68 μW, 功率密度达到约729 μW/cm3, 体现出良好的在人体皮肤表面将机械能转化为电能的能力. 在将该柔性压电皮肤电子器件通过整流电桥连接于串联的发光二极管(LED)上时, 其在敲打机械刺激下输出的电能足够点亮多达15个LED灯泡, 如图5所示, 足以证明该器件可作为高效的压电纳米发电机, 具有为皮肤电子功能器件进行独立供能的巨大潜力.
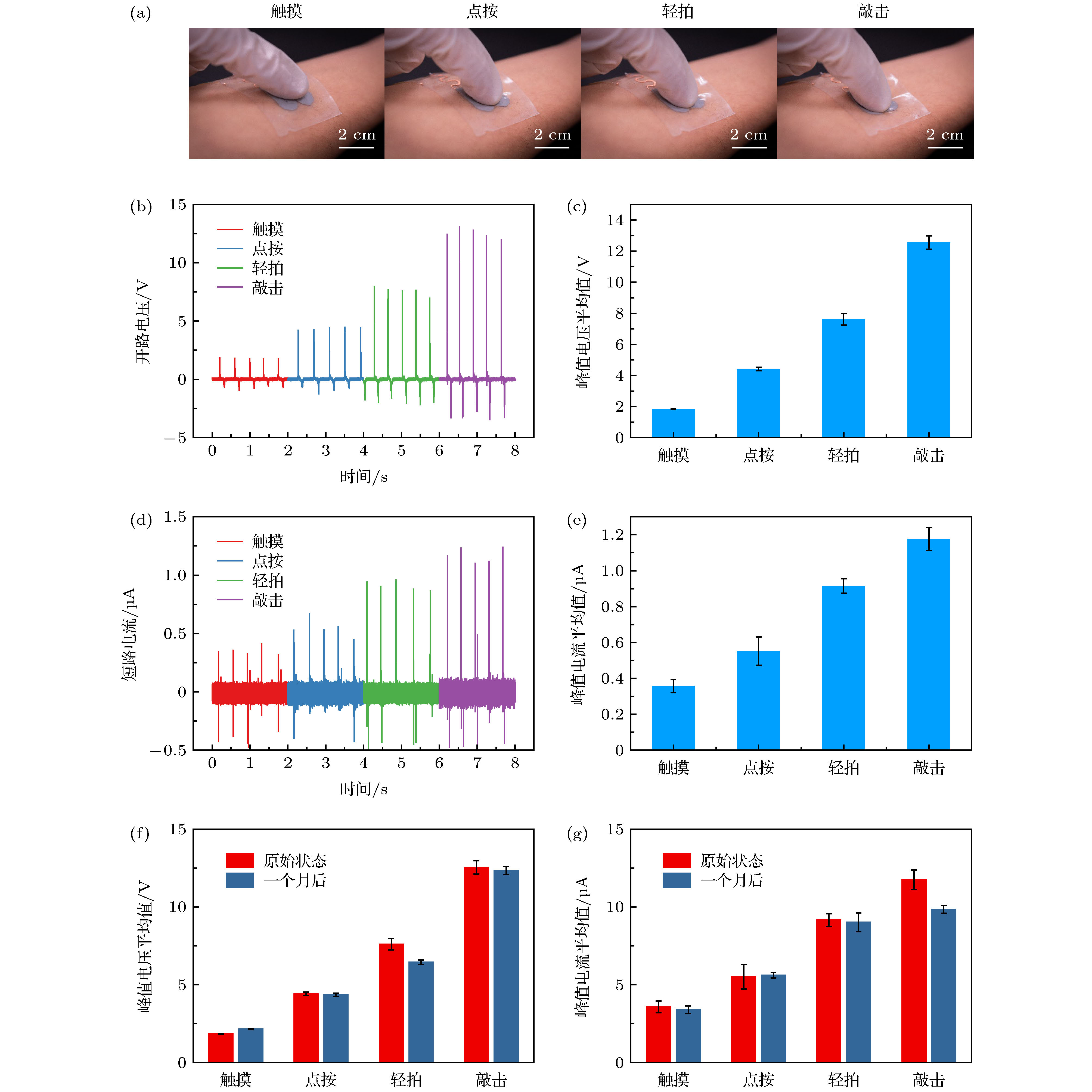 图 4 压电器件贴于人体表面实际测试时的电学性能 (a) 4种不同力度的接触方式: 触摸、点按、轻拍、敲击; (b) 开路电压输出的实时测量值; (c) 开路电压平均峰值统计图; (d) 短路电流输出的实时测量值; (e) 短路电流平均峰值统计图; (f) 器件经历长时间后的触觉传感开路电压与原始性能的对比; (g)器件经历长时间后的触觉传感短路电流与原始性能的对比
图 4 压电器件贴于人体表面实际测试时的电学性能 (a) 4种不同力度的接触方式: 触摸、点按、轻拍、敲击; (b) 开路电压输出的实时测量值; (c) 开路电压平均峰值统计图; (d) 短路电流输出的实时测量值; (e) 短路电流平均峰值统计图; (f) 器件经历长时间后的触觉传感开路电压与原始性能的对比; (g)器件经历长时间后的触觉传感短路电流与原始性能的对比Figure4. Electrical performance of the piezoelectric device when attached to human skin: (a) Photos of four different contact method: touching, poking, tapping and hitting; (b) real-time measured open-circuit voltage outputs; (c) average peak open-circuit voltages; (d) real-time measured short-circuit current outputs; (e) average peak short-circuit currents; (f) comparison between open-circuit voltage outputs of devices in original state and after one-month use when used for tactile sensing; (g) comparison between short-circuit current outputs of devices in original state and after one-month use when used for tactile sensing.
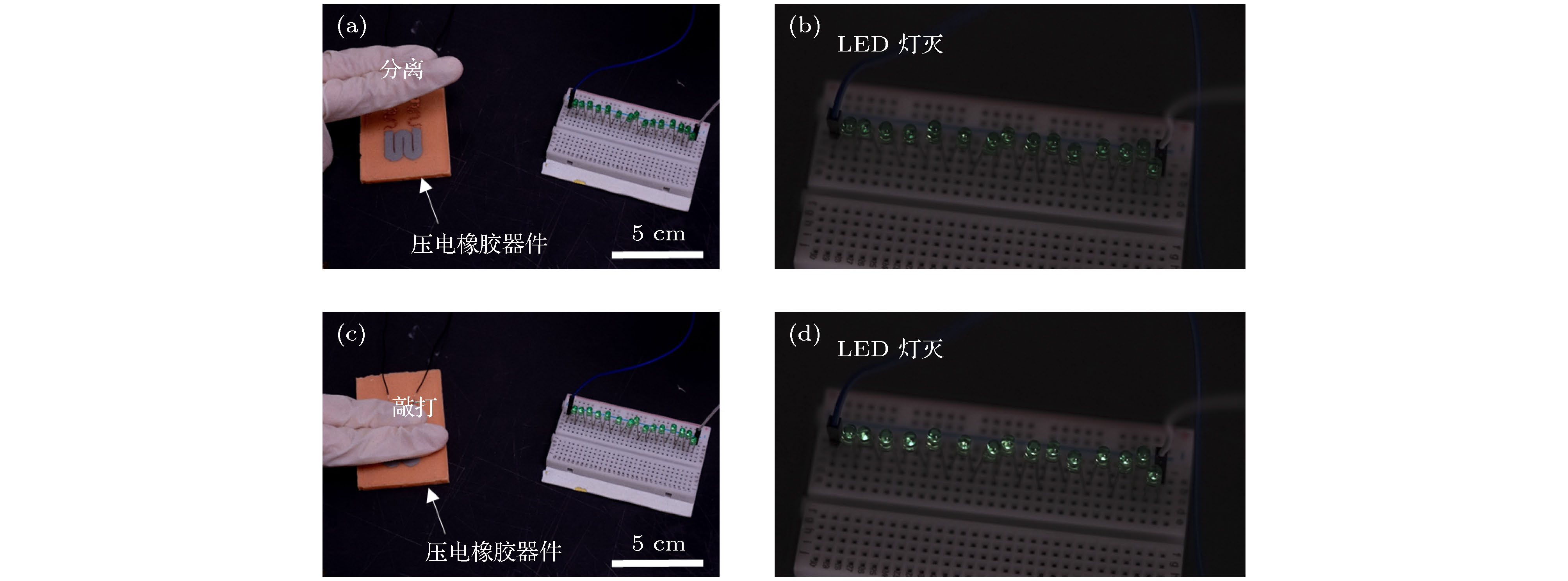 图 5 压电器件输出电能为15个LED灯泡供电测试 (a), (b) 在手指与压电器件分离时, LED灯灭; (c), (d) 手指敲打压电器件瞬间, 15个LED灯泡全部亮起
图 5 压电器件输出电能为15个LED灯泡供电测试 (a), (b) 在手指与压电器件分离时, LED灯灭; (c), (d) 手指敲打压电器件瞬间, 15个LED灯泡全部亮起Figure5. Demonstration test of supplying energy for 15 LED bulbs only by the piezoelectric device: (a), (b) LEDs are blacked out when fingers lift off from the device; (c), (d) 15 LEDs are all lighten up at the moment fingers hit the device.
相信通过材料、结构等方面进一步的优化改进, 随着制备工艺的成熟与产业化, 本文展示的自供能柔性皮肤电子器件能够为未来的柔性电子、皮肤电子产业提供更好的自供能能源管理策略, 实现可独立、稳定、长时间工作的健康数据传感与监测等功能, 助力生物医学工程、人机交互界面工程等领域的研究与发展.
感谢香港城市大学生物医学工程系刘一明的讨论和对实验的帮助.
