全文HTML
--> --> -->国内外对于浅海混响的研究相对较多, 建立了简正波混响理论[1-3]、射线混响理论[4-7]和抛物方程混响理论[8,9]等. 简正波混响理论最早由Bucker和Morris[1]提出, Zhang和Jin[2]对其进一步发展, 推导出了浅海远程混响强度的一般表达式, 并分析了负跃层浅海中平均混响强度的衰减规律. 射线方法是对波动理论的近似, 具有物理意义直观、运算简单等特点, 应用射线理论研究海底混响已经取得了丰富的成果. 射线理论一般更多地被应用于近程混响计算, 在一定海底散射模型假设前提下, 可以很好地解释实验结果, 同时射线方法也是研究深海混响的首选. 抛物方程混响理论适用于水平变化的复杂海洋环境, 但随着频率的增加计算量会迅速增加. 射线方法是波动理论的近似, 具有物理意义直观、运算简单等特点, 应用射线理论研究海底混响已经取得了丰富的成果. 射线理论一般更多地应用于近程混响计算, 同时也是研究深海混响的首选. 此外, 李风华等[10]提出了射线-简正波相干混响理论, 并解释了浅海混响强度的振荡现象. 刘建军等[11,12]根据射线-简正波混响理论和三维海底散射模型, 给出了浅海异地混响衰减和混响垂直相关的一般表达式, 并由此有效地反演了海底反射损失与海底散射系数. 吴金荣等[13]研究了倾斜海底环境下近程混响强度的衰减特性, 并讨论了海水及海底多种因素对混响衰减特性的影响.
深海混响与浅海混响的特性有明显区别, 对其分析手段和数值建模方法都有所不同. Mackenzie[14]计算了特定频率下近海底声源和接收器的深海海底混响, 并说明了散射公式的适用角度范围. Urick和Saling[15]计算了爆炸声源激发的海底背向散射, 并得出了散射强度随角度的变化曲线. Ellis等[16,17]将Lambert散射模型和基于Kirchhoff近似的表面散射函数相结合, 提出了包含背向散射和侧向散射的三维海底散射函数, 将其用于深海异地混响的数值仿真, 并与实验测量结果进行了对比分析. Williams和Jackson[18]利用Kirchhoff近似和微扰理论描述海底背向散射, 同时讨论了海底沉积层和基底对散射的影响. 翁晋宝等[19]通过射线方法对本地深海海底混响进行了数值仿真, 并对实验数据进行了初步解释和分析. 郭熙业等[20]基于射线理论提出了收发合置的非相干海底混响信号模型, 简化了混响信号预报的计算过程. Xu等[21]计算了声波经第一次海底反射产生的深海混响, 得到了与实验数据一致的数值结果. Yang等[22]在Jackson射线混响模型的基础上[23], 结合有限元法提出了深海异地海底混响模型, 并用其有效反演了海底声学参数. 海洋混响主要是由于海底、海面和海洋介质的不均匀性对声波的散射引起的, 从实验观测来看, 对深海混响而言, 海底散射是主要的贡献.
本文基于射线理论, 使用包含背向散射和侧向散射的三维海底散射系数, 提出了一种深海海底混响模型, 可对本地和异地混响进行计算. 该模型首先对海底散射体进行网格式划分, 可以更加准确地获取不同路径声线的传播时间, 从而精确、快速计算得到混响强度. 在海上实验中获取了大接收深度的深海混响信号, 对其特性进行了分析, 并将实验数据与数值模拟结果进行对比, 获得实验海区的海底散射系数.
2.1.实验简介
2018年4月, 中国科学院声学研究所声场声信息国家重点实验室在南海进行了一次综合性海上声学实验, 深海混响是其主要内容之一. 实验采用单船结合深海声学接收潜标的作业方式进行, 如图1所示. 接收潜标系统由20个自容式水听器(USR)组成, USR以非等间距方式布放在85—3400 m深度范围内, 接收灵敏度为–170 dB, 信号采样率为16 kHz. 围绕接收潜标, “实验1号”船在声传播测线上间隔约6 min投掷一枚标定深度为200 m的1 kg TNT当量宽带爆炸声源. 图 1 实验设备布放位置及作业方式示意图
图 1 实验设备布放位置及作业方式示意图Figure1. Configuration of the deep-water reverberation experiment.
图1给出了传播测线上的海深变化, 垂直阵处海深约为3472 m, 0—8 km距离范围内海底地形相对平坦, 更远处海深发生明显变化. 本文对混响的分析假设海底是水平不变的, 所以只选取0—8 km距离范围内爆炸声源产生的混响信号. 图2给出了实验海域及实验过程的俯视示意图, 除图1给出的实验条件外, 还存在一个小海底山距垂直阵约14 km, 会对接收的混响信号产生一定影响, 在后面将对此进行分析. 实验期间测量的该海区海水声速剖面如图3所示, 其中0—1700 m深度范围内的声速为实测数据, 由于声道轴以下的声速结构具有稳定性, 1700 m以深的声速数据由水文数据库获得, 将其与实测深度的声速通过插值连接得到整个水体的声速剖面.
 图 2 实验海域及实验过程俯视图
图 2 实验海域及实验过程俯视图Figure2. Vertical view of experimental area and process.
 图 3 实验海域海水声速剖面
图 3 实验海域海水声速剖面Figure3. Sound speed profile of seawater in experimental area.
2
2.2.实验数据处理
图4给出了实验中不同深度水听器记录爆炸声源激发的声信号, 声源与接收阵的水平距离为0.76 km. 将接收到的时域信号记为


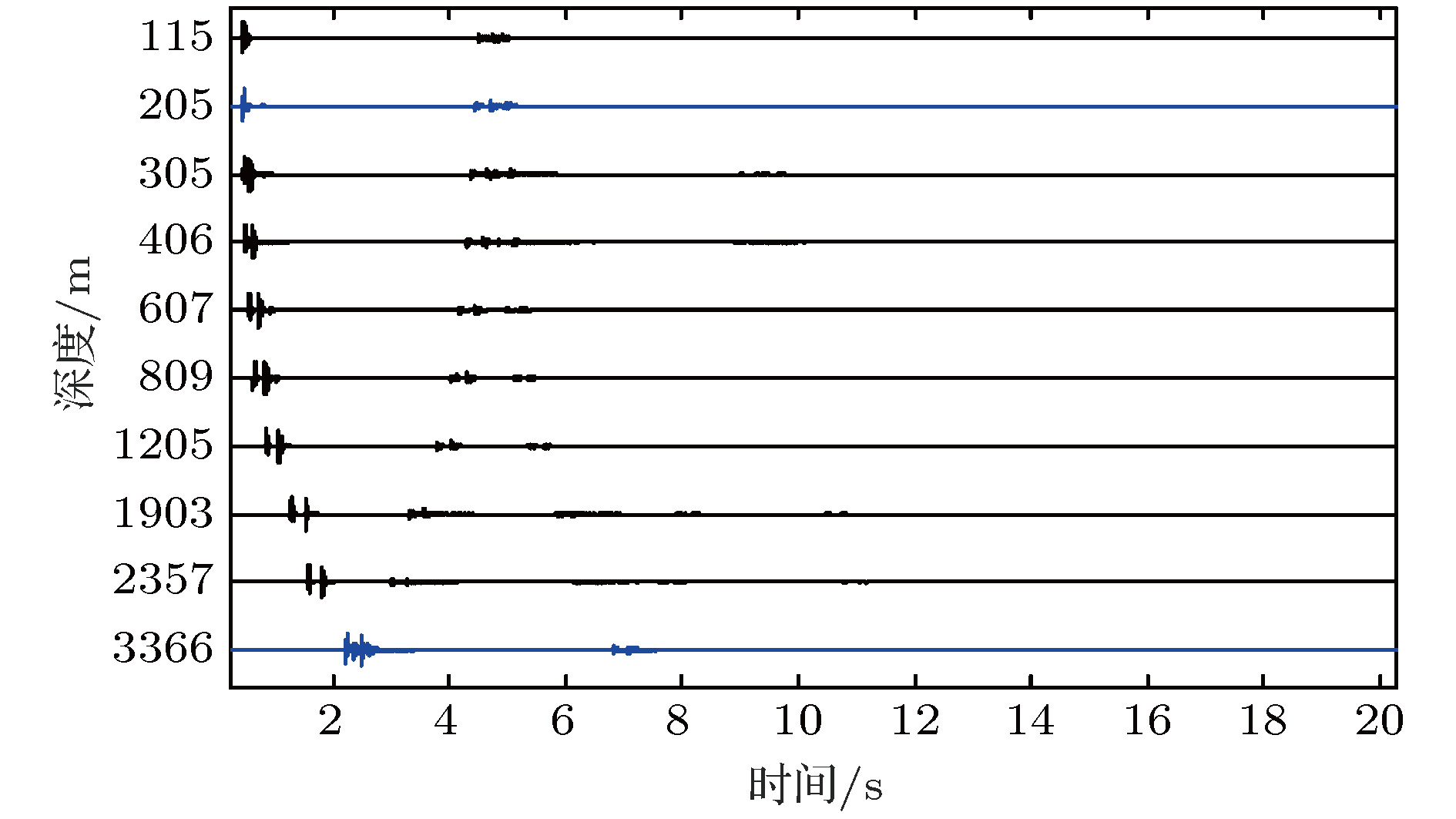 图 4 不同深度水听器接收到的声信号, 声源与接收阵的水平距离为0.76 km
图 4 不同深度水听器接收到的声信号, 声源与接收阵的水平距离为0.76 kmFigure4. Sound signals received by hydrophones at different depth. The horizontal distance between the source and the receiving array is 0.76 km.





通过上述方法对图4中接收深度为205和3366 m的声信号(蓝色曲线)进行处理, 图5给出了混响强度随时间变化的曲线, 可见多个明显的峰值. 图5(a)为205 m接收深度的结果, 其中第一个峰值对应的是声源到接收器的直达波及经海面反射的声波, 之后强度迅速减小, 对应的是海面混响与体积混响信号, 不包含海底散射信号; 第二个峰值为一次海底反射波, 此后强度逐渐下降, 此时声信号主要由声波经海底散射后传播回接收器的信号组成. 之后随着时间的增加, 出现的峰值分别对应不同次数的海底反射声波, 每个峰值后声强逐渐下降, 对应的是经海底反射后的混响信号. 从图中可以看出, 经海底反射之后到达水听器的声信号明显高于直达声之后的海面混响和体积混响信号, 因此可知, 水听器接收到的混响信号主要贡献来自海底散射, 在经由海底散射之后的混响信号中, 海面混响和体积混响可以忽略. 图5(b)为大接收深度数据的处理结果(3366 m), 其各个峰值的位置与图5(a)明显不同. 由于接收器距离海底较近, 直达声波和一次海底反射波到达接收器的时间十分接近, 因此二者在时间上重合形成了第一个峰值. 后面的多个峰值对应不同次数的海底反射波, 每个峰值后逐渐下降的部分为海底混响信号. 值得注意的是, 第一个峰值之后海底混响强度明显小于其他时间, 这与所对应的海底散射掠射角较小有关.
 图 5 混响强度实验数据处理结果 (a)接收器深度205 m; (b)接收器深度3366 m
图 5 混响强度实验数据处理结果 (a)接收器深度205 m; (b)接收器深度3366 mFigure5. Reverberation from experimentdata: (a) Receiver depth is 205 m; (b) receiver depth is 3366 m




根据互易原理, 距声源水平距离为r的水听器接收到单位面积上散射体对应的散射声压可以表示为(省略了海深









 图 6 海底散射示意图
图 6 海底散射示意图Figure6. Bottom scatteringgeometry.
Ellis和Haller[16]在Lambert背向散射模型的基础上建立了适用于异地混响的三维散射模型, 其散射系数表示为








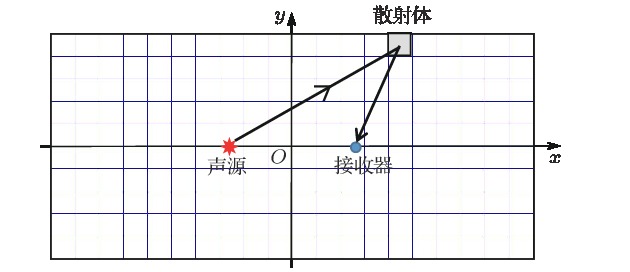 图 7 网格法散射体划分示意图
图 7 网格法散射体划分示意图Figure7. Sketch of grid method for dividing scatterers.
在图7中, 当划分的网格足够小时, 可以认为每条声线到达同一个散射体不同区域的传播方式和能量都是相同的, 就可以使用散射体上一个点的传播情况代替整个散射面元的计算, 通过每个散射元上的计算结果乘以散射面积进而求和得到接收点的混响信号. 对海底散射体划分的网格越密集, 得到的计算结果就越精确, 但同时也会增加计算时间. 为了在保证计算精度的同时提高计算效率, 在划分网格时对散射体大小进行区分, 对距声源和接收器较近的散射体进行密集划分, 对距声源和接收器较远的散射体的划分相对稀疏, 然后对不同的散射面积分别进行计算.
海底散射体、声源和接收器所处的坐标系中(见图7), 四个象限的散射体几何位置是对称的, 但是声源与接收器的所处的深度通常不同, 即y坐标轴的左右散射体对混响的影响并非完全对称, 但关于x坐标轴是对称的. 所以, 混响计算时只考虑第一、二象限的散射体, 然后对计算结果做双倍处理得到最终的混响强度.
针对实验海区的环境, 图8(a)给出了一个混响强度的计算结果, 使用的具体参数为: 声源频率为500 Hz, 声源深度为200 m, 接收深度为3021 m, 声源与接收器的距离为5 km, 海底声学参数及散射系数的选取与下一节相同, 不影响这里的问题分析, 暂不做说明. 对于9 s时刻(见图8(a), 时间处于第二次和第三次海底反射之间)的混响强度, 首先确定所有经声源-散射体-接收器传播/散射历经9 s的声线, 然后计算每条声线所对应散射体对该时刻混响强度的贡献值, 即产生混响信号的强度, 将其标注在散射体各自所处的网格上, 得到图8(b)中海底不同位置散射体对其贡献的大小. 可见, 在该计算条件下(声源和接收器的水平位置和深度均不同), 对该时刻混响结果有影响的散射体不在同一个椭圆环上, 而是分布于若干圆环, 对应不同的传播方式. 随着混响时间的增加, 对应的椭圆环会不断扩大, 直至下一个混响峰值出现, 即出现了新的海底反射, 然后不同的传播路径将有新的椭圆环与之相对应.
图9给出了图8(b)中不同散射体圆环所分别对应的声波传播方式. 可以看出, 靠近声源有4个椭圆环, 分别对应4种传播方式的声线: 海底-海面-海底反射、海底-海面反射、海面-海底-海面-海底反射、海面-海底-海面反射; 靠近接收器有2个椭圆环, 分别对应两种传播方式的声线: 海底-海面-海底反射、海面-海底-海面-海底反射. 对混响信号产生贡献的海底散射体圆环的大小和位置与声源和接收器的相对位置有关, 椭圆环的个数和海底反射次数正相关. 由上面分析可知, 对于深海环境, 声源到达接收器的传播路径较多, 通常将海底散射体按照圆环或椭圆环进行划分的传统方式不能准确得到混响结果. 本文预先将海底散射体进行网格式划分, 然后根据实际的传播路径及对应的传播时间选择相应的散射元, 可提高混响的计算精度.
 图 8 海底不同位置散射体对同一时刻混响强度的贡献 (a)数值计算的混响强度; (b) 海底散射体对(a)中9 s时刻混响强度的贡献
图 8 海底不同位置散射体对同一时刻混响强度的贡献 (a)数值计算的混响强度; (b) 海底散射体对(a)中9 s时刻混响强度的贡献Figure8. Contribution of scatterers at different locations to reverberation at fixed time: (a) Numerically calculated reverberation; (b) contribution of bottom scatterers to reverberation at 9-s moment in (a).
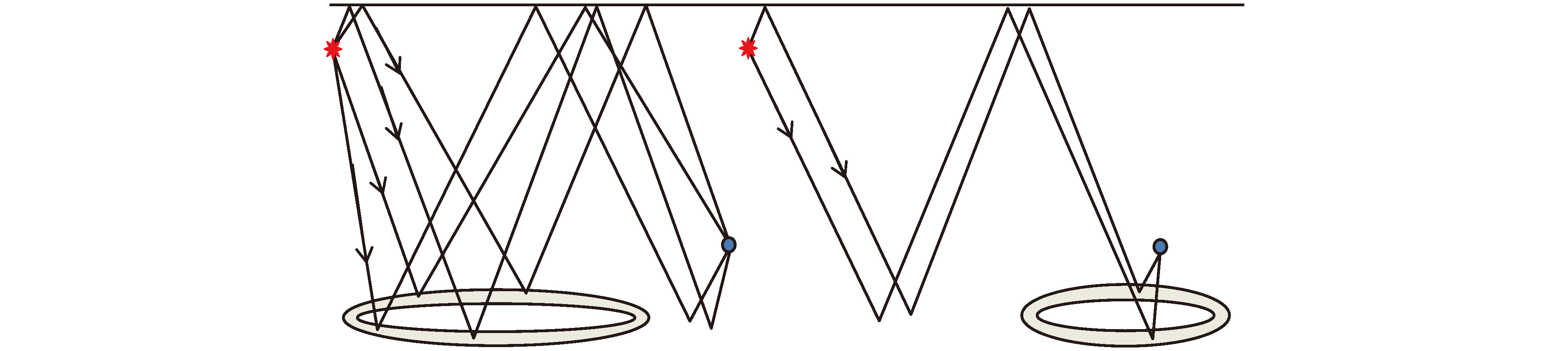 图 9 不同散射体椭圆环对应的声线传播方式示意图
图 9 不同散射体椭圆环对应的声线传播方式示意图Figure9. Schematic diagram of sound propagation corresponding to different elliptical rings of bottom scatterers.




图10给出了声源频率500 Hz时不同接收距离和大接收深度下的数值模拟结果, 并将其与实验获取的混响结果进行对比. 从图中可以看出, 数值计算得到的混响强度结果与实验数据整体吻合较好, 说明选取的海底散射系数适用于该实验海区. 从对比的细节看, 可以发现模拟结果与实验数据在三个部分相差较大, 以图10(a)为例, 分别出现在1—3.5 s, 28—34 s, 以及每一个峰值处, 图10中的其他子图均与之类似, 具体时间有所不同. 每一个峰值处的计算结果比实验混响强度偏小, 是由于实验结果峰值处的能量主要由海底、海面反射信号组成, 但数值计算时没有专门考虑这部分反射信号, 而是通过 (5) 式中散射系数第二项镜反射方向的散射信号来体现, 存在一定程度的能量缺失. 在1—3.5 s范围内, 实验结果在第一个峰(直达声)之后迅速下降, 由于这部分是声波在海底反射之前产生的, 因此主要是体积混响和海面混响. 混响模型只考虑了海底混响, 所以不能给出这部分结果. 另外, 在28—34 s附近, 实验的混响信号出现明显增强. 从图2可知, 在距离接收阵约14 km处有一个海底山, 该时间段内的峰值是声信号传播到海底山然后经反射再传播到接收阵产生的.
 图 10 数值模拟的大接收深度混响强度与实验结果对比. 声源频率500 Hz, 图中蓝色曲线为实验结果, 红色曲线为数值模拟结果. (a) 收发相距0.76 km, 接收深度1903 m; (b) 收发相距0.76 km, 接收深度3366 m; (c) 收发相距3.19 km, 接收深度2306 m; (d) 收发相距3.19 km, 接收深度3366 m; (e) 收发相距5.45 km, 接收深度2357 m; (f) 收发相距5.45 km, 接收深度3366 m; (g) 收发相距7.75 km, 接收深度3021 m; (h) 收发相距7.75 km, 接收深度3366 m
图 10 数值模拟的大接收深度混响强度与实验结果对比. 声源频率500 Hz, 图中蓝色曲线为实验结果, 红色曲线为数值模拟结果. (a) 收发相距0.76 km, 接收深度1903 m; (b) 收发相距0.76 km, 接收深度3366 m; (c) 收发相距3.19 km, 接收深度2306 m; (d) 收发相距3.19 km, 接收深度3366 m; (e) 收发相距5.45 km, 接收深度2357 m; (f) 收发相距5.45 km, 接收深度3366 m; (g) 收发相距7.75 km, 接收深度3021 m; (h) 收发相距7.75 km, 接收深度3366 mFigure10. Comparison of reverberation at large receiving depths between numerical simulations and experimental results. The source frequency is 500 Hz. In each subgraph, the blue curve denotes the experimental result, and the red curve indicates the numerical simulation result. The distance from source to receiver and the receiving depth is (a) 0.76 km and 1903 m, (b) 0.76 km and 3366 m, (c) 3.19 km and 2306 m, (d) 3.19 km and 3366 m, (e) 5.45 km and 2357 m, (f) 5.45 km and 3366 m, (g) 7.75 km and 3021 m, (h) 7.75 km and 3366 m.
图10中均为大接收深度的混响结果, 深度范围在1903—3366 m, 在这种情况下, 海底散射掠射角

 图 11 接收器靠近海面时的混响强度. 声源频率500 Hz, 图中蓝色曲线为实验结果, 红色曲线为数值模拟结果; (a)收发相距0.76 km, 接收深度205 m; (b)收发相距7.75 km, 接收深度205 m
图 11 接收器靠近海面时的混响强度. 声源频率500 Hz, 图中蓝色曲线为实验结果, 红色曲线为数值模拟结果; (a)收发相距0.76 km, 接收深度205 m; (b)收发相距7.75 km, 接收深度205 mFigure11. Reverberation for receiving depth near the sea surface. The source frequency is 500 Hz. In each subgraph, the blue curve denotes the experimental result, and the red curve indicates the numerical simulation result. The distance from source to receiver and the receiving depth is (a) 0.76 km and 205 m, (b) 7.75 km and 205 m.
感谢参加2018年春季南海海上声学综合实验的全体工作人员, 他们的辛勤劳动为本文提供了宝贵的实验数据.
