1.State Key Laboratory of High Field Laser Physics, Shanghai Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, Shanghai 201800, China 2.University of Chinese Academy of Sciences, Beijing 100049, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 11274327, 61521093, 61527821), the Instrument Developing Project of the Chinese Academy of Sciences, China (Grant No. YZ201538), the Young Scientists Fund of the National Natural Science Foundation of China (Grant No. 11804350), and the Shanghai Sailing Program, China (Grant No. 17YF1421300).
Received Date:17 September 2018
Accepted Date:30 October 2018
Available Online:01 February 2019
Published Online:05 February 2019
Abstract:Scattering in medium is a serious problem that limits the imaging depth or imaging distance. According to the absorption and scattering of light in biological tissues, it is difficult for both excited light and signal light to penetrate biological tissues, and the scattering effect in biological tissues will destroy the phase information of signal light, so it is difficult to directly carry out high resolution imaging in deep biological tissues. In the recent studies it is surprisingly found that two-dimensional image information of an object can be directly recovered from the disordered speckle pattern with pseudothermal light sources based on the optical memory effect (ME) and autocorrelation (AC) method. In this paper, we study a speckle imaging method based on pseudothermal illumination, where the Gerchberg-Saxton algorithm is used to perform the phase recovery of the object. Here, the advantages and disadvantages of HIO&ER algorithm and ping-pang (PP) algorithm based on the ME and AC method for imaging through random scattering medium are compared by using numerical simulation. By comparing the recovery effects and the numbers of iterations between HIO&ER algorithm and PP algorithm, it is found that PP algorithm has a fast running speed when a higher recovery quality is maintained. In addition, a continuous He-Ne laser and rotating ground glass are used to produce a pseudothermal light source. And a single frame imaging of different shape objects, which are a few millimeters away from random scattering medium, is carried out by objective lens. Then PP algorithm is adopted to recover the actual image of micron object. Furthermore, we experimentally find that the magnification, resolution and image intensity, which are qualitatively studied, are seriously affected by the distance between the focal plane of the object lens and scattering medium. We find that with the increase of the distance, the obtained autocorrelation graph and retrieval graph have corresponding amplification and the object sampling point information collected on sCOMS increases, which improves its resolution. However, the scattered light intensity collected by objective lens decreases after passing through the scattering medium, making the intensity of recovered image weaken. The results of this study will further promote the application of ME and AC method in the study of deep tissue medical imaging. Keywords:memory effect/ intensity autocorrelation/ random scattering/ phase recovery algorithm
 图 1 散斑产生示意图
图 1 散斑产生示意图



































 图 2 相位恢复算法框图
图 2 相位恢复算法框图



 图 3 成像过程的数值模拟 (a) 物体; (b) 点扩散函数; (c) 散斑图; (d) 点扩散函数AC; (e) 物体AC; (f) 散斑AC; (g) 能量谱开根; (h) 重建结果
图 3 成像过程的数值模拟 (a) 物体; (b) 点扩散函数; (c) 散斑图; (d) 点扩散函数AC; (e) 物体AC; (f) 散斑AC; (g) 能量谱开根; (h) 重建结果


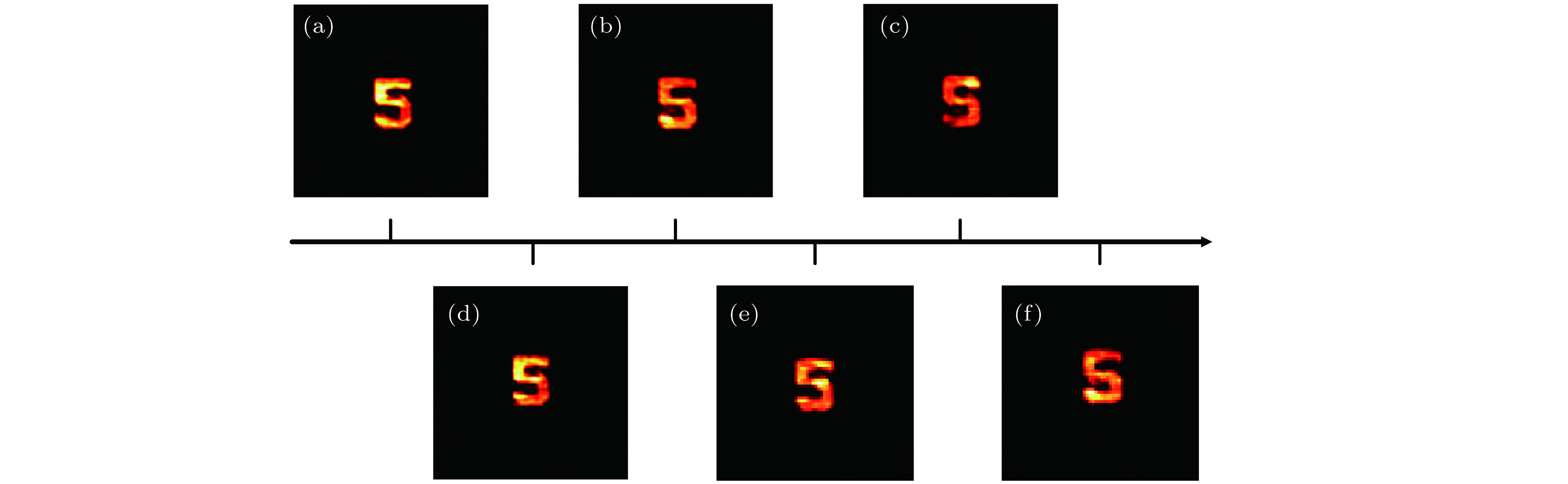 图 4 不同迭代次数下的恢复效果 (a)—(c) HIO&ER算法的恢复结果, 其中, (a)
图 4 不同迭代次数下的恢复效果 (a)—(c) HIO&ER算法的恢复结果, 其中, (a) 















 图 5 通过散射介质成像的光学装置 (a)实验光路图; (b)赝热光的产生; (c)散斑的产生
图 5 通过散射介质成像的光学装置 (a)实验光路图; (b)赝热光的产生; (c)散斑的产生




 图 6 不同数字的实验结果 (a)—(e)数字“1”的恢复过程, 其中, (a)物体, (b) sCOMS成像, (c)散斑AC, (d)能量谱开根, (e)重建结果; (f)—(t)数字“3”, “5”, “6”的恢复过程
图 6 不同数字的实验结果 (a)—(e)数字“1”的恢复过程, 其中, (a)物体, (b) sCOMS成像, (c)散斑AC, (d)能量谱开根, (e)重建结果; (f)—(t)数字“3”, “5”, “6”的恢复过程





 图 7 不同物镜和散射介质间距对成像效果的影响 (a)—(f)不同间距下的散斑AC结果; (g)—(l)不同间距下的恢复结果
图 7 不同物镜和散射介质间距对成像效果的影响 (a)—(f)不同间距下的散斑AC结果; (g)—(l)不同间距下的恢复结果



