 ,*,2), 马小飞*
,*,2), 马小飞*LOCKING PROBLEM AND LOCKING ALLEVIATION OF ANCF/CRBF PLANAR BEAM ELEMENTS1)
Zhang Dayu*,??, Luo Jianjun??, Wang Hui,*,2), Ma Xiaofei*通讯作者: 2) 王辉, 研究员, 主要研究方向: 空间可展开结构设计与动力学. E-mail:13519122235@139.com
收稿日期:2020-08-21网络出版日期:2021-03-18
| 基金资助: |
Received:2020-08-21Online:2021-03-18
作者简介 About authors

摘要
本文系统地研究了基于一致旋转场列式的绝对节点坐标 (ANCF consistentrotation-based formulation, ANCF/CRBF)平面梁单元的泊松闭锁问题及闭锁缓解技术.为了全面理解该类型单元的闭锁特性及明确单元的应用范围,文中首先开发了两种新的ANCF/CRBF刚性截面梁单元, 新单元在ANCF全参数梁的基础上,对梯度向量施加正交矩阵约束, 得到梯度与转角对时间导数之间的速度转换矩阵,从而引入转角参数. 新单元节点处完全消除了泊松闭锁和剪切效应,这是与传统ANCF/CRBF刚性截面梁单元的不同之处. 然后,对比分析了这三种ANCF/CRBF刚性截面梁单元泊松闭锁的特点.发现该类型单元对节点的横向梯度施加了运动学约束, 导致节点处截面不能变形,无法捕捉泊松效应, 但是单元内部能完全捕捉,这种不连续情况会加重单元整体的泊松闭锁问题. 并且发现对单元梯度约束的越多,闭锁问题越严重. 随后, 分别采用两种闭锁缓解技术, 弹性线方法和应变分解方法,进一步研究了单元的收敛性. 最终,通过多种静力学和动力学测试研究了泊松闭锁对ANCF/CRBF平面梁单元计算精度的影响及闭锁缓解技术在该类型单元上的缓解效果.
关键词:
Abstract
In this paper, the Poisson locking on the consistent rotation-based formulation (CRBF) of the planar beam element based on the absolute nodal coordinate formulation (ANCF) kinematic description is discussed. First of all, in order to fully understand the locking problem of ANCF/CRBF element, two new ANCF/CRBF planar beams are developed by constraining all of the position-vector gradients of ANCF planar fully-parameterized beam with an orthogonal matrix. Using this orthogonal matrix, a nonlinear velocity transformation matrix is evaluated to write the time derivatives of the ANCF gradients at the nodes in terms of the time derivatives of the rotation parameter. Two new ANCF/CRBF beams have a rigid cross-section and no shear effect. One of the new ANCF/CRBF beams has two position vectors, one rotation angle and one axial extensibility parameter as the nodal coordinates, while the other does not have a longitudinal extensibility parameter. Then, the difference in the Poisson locking problem among the two new ANCF/CRBF beams and traditional ANCF/CRBF beam is discussed. It can be concluded that since the constraints imposed on the position-gradient vectors, ANCF/CRBF beam has an insufficient Poisson effect on the nodes and a sufficient Possion effect in the interior of the element. This inconsistent Poisson effect will lead to a more severe locking problem than ANCF fully-parameterized elements. Furthermore, the locking problem increases with the number of constraints on the nodal gradients, that is ANCF/CRBF new beams have a more serious locking effect compared to traditional ANCF/CRBF beam. Finally, in order to achieve a better convergence of the new elements, two locking alleviation methods, Elastic Center Line (ECL) and Strain Split Method (SSM), are used. The locking problem on the performance of ANCF/CRBF beams is tested using several examples that include static and dynamic examples, in order to identify the scope of applicability of such elements. The numerical results obtained from ANCF/CRBF beams are compared with the ANCF beam, and with the conventional beam implemented in a commercial finite element software LS-DYNA.
Keywords:
PDF (1549KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
张大羽, 罗建军, 王辉, 马小飞. ANCF/CRBF平面梁闭锁问题及闭锁缓解研究1). 力学学报[J], 2021, 53(3): 874-889 DOI:10.6052/0459-1879-20-296
Zhang Dayu, Luo Jianjun, Wang Hui, Ma Xiaofei.
引言
柔性梁被广泛地应用于航天与机械系统,是柔性多体系统动力学最典型的一类研究对象,建立其动力学模型可为复杂柔性多体系统设计和分析提供重要的理论依据.建立柔性梁模型的关键是如何准确地描述梁单元连续的旋转场,特别是当柔性梁经历大转动大变形运动.区分不同类型的非线性柔性梁建模方法的一个重要特征是如何准确地描述系统中的有限转动[1-10].共旋坐标法[11-15]在处理有限转动时通过非线性迭代求解无限小的转动矢量,并将计算的转动增量叠加到方向余弦矩阵上.但是这类方法在求解时必须确保迭代步长不能过大,这样才能将转动增量近似为小转动的定轴旋转. 此外,共旋坐标法将全局位移场分解为刚体运动和弹性变形,使得单元的惯性力等首先定义在迁移坐标系内, 而后再转换到全局坐标系,同样要求了该方法的迭代步长不能过大. 但是,过小的迭代步长会造成系统运动方程的线性化,导致柔性体在其纯刚体运动下产生非零的应变能,因此共旋坐标法仅适合用于模拟具有小应变的系统.几何精确梁方法[16-19]采用惯性坐标系下的节点绝对位移来描述结构的整体运动,不再对刚体运动和弹性运动进行区分, 避免了增量法中的线性化问题,因此可以处理柔性梁的大变形问题.几何精确梁方法采用绝对位置向量和有限转角参数作为节点坐标,位移场和旋转场采用两个独立的插值函数,其中对有限转动插值方法的研究是该方法研究的一个重要分支.对于几何精确梁独立的旋转场插值策略,Shabana和Ding[20]指出该策略会导致坐标的冗余及梁内同一物质点在位移场和转动场上的几何构型不一致,并通过算例证明了采用两个独立的插值函数表述位移和转动会导致梁在同一时刻存在两种不同的构型,与刚体动力学假设不相符. 相比独立的旋转场插值, Shabana[21]提出了绝对节点坐标法(absolute nodal coordinate formulation, ANCF),该方法采用统一的插值函数描述梁内物质点的位置和转动.通过惯性坐标系下的梯度向量描述柔性体的方向, 避免了对转角参数的相加运算,致使求解过程为非增量形式, 这点区别于几何精确梁方法. 此外,该方法还具有常数质量阵及不存在科氏力和离心力项的优点,适用于解决大转动大变形的柔性体的建模问题. 近年来,绝对节点坐标方法已受到越来越多的****的关注与研究[22-30,53-55].
绝对节点坐标法采用梯度向量描述柔性体转动和应变,虽然可以描述系统运动过程中的大转动大变形, 但也存在一些缺陷. 首先,相比转角参数, 梯度向量不具有明确的转动物理意义,不利于面向单元旋转的设计和控制. 例如,在变形过程中梯度变化方向不代表实际的系统旋转方向,对梯度向量的控制最终未必得到想要控制的转动量. 其次, 相比转角,梯度向量的数量更多, 导致系统自由度的升高, 以至加重系统计算负担.2015年Shabana[31]提出基于一致旋转场列式的绝对节点坐标单元(ANCF consistentrotation-based formulation, ANCF/CRBF).该单元在统一的位移场和旋转场描述基础上,通过速度转换矩阵将梯度向量由转动参数替代, 成功引入了转角坐标,解决了上述缺陷. 此外,ANCF/CRBF单元采用统一的插值函数解决了位移场和旋转场分开插值策略而导致坐标和几何构型冗余的问题.例如, 线性插值的位移场得到零曲率, 而线性插值的转动场得到高度非线性曲率,导致单元的曲率定义不统一. 随后, Zheng等[32]建立了ANCF/CRBF平面梁单元,并进行了单元动力学分析.
但是, 已有ANCF/CRBF梁在ANCF全参数平面梁的框架上开发的,同样存在严重的闭锁问题, 特别是泊松闭锁, 会给数值计算带来困难.ANCF单元泊松闭锁问题产生的原因是单元的轴向高阶插值和横向低阶插值不一致导致不同方向间的应力相互耦合,致使单元在弯曲过程中由轴向的弯曲变形高阶项产生出伪应力, 导致单元性能下降,呈现出“弯曲锁死”的现象.对于传统ANCF全参数梁单元的泊松闭锁问题及其缓解技术, 典型的研究有:Gerstmayr等[33]采用缩减积分方法(selectively reduced integration method,SRIM)重新构造了平面梁单元的弹性力矩阵,选择性地避开了对弯曲变形的高阶项的积分, 可以有效缓解泊松闭锁.Mikkola等[34]在平面ANCF梁单元基础上采用对横向变形场独立插值技术,提出了一种基于混合插值的平面ANCF梁单元.动力学仿真结果表明该单元具有更高的弯曲变形精度和收敛性. Schwab和Meijaard[35]采用弹性线方法(elastic center line,ECL)构造了新的弹性力公式, 消除了轴向与横向变形间的高阶耦合项,缓解了泊松闭锁问题. 此外, Schwab和Meijaard[35]分别采用基于Hellinger-Reissner和Veubeke-Hu-Washizu变分原理的方法用于消除三维ANCF全参数梁单元剪切闭锁问题,改善了单元的弯曲性能.Hussein等[41]采用Hellinger-Reissner方法消除了二维ANCF全参数梁单元的剪切闭锁问题,并分别测试了Hellinger-Reissner方法在薄梁和厚梁动力学分析中消除闭锁的效果.李文雄等[42]提出基于Hellinger-Reissner变分原理的无闭锁曲梁单元.与常规曲梁单元相比,该单元具有更高的精度和效率.Patel和Shabana[36]提出了的一种全新的缓解单元泊松闭锁的方法, 应变分解方法(strainsplit method, SSM). 其核心是将应变分解为单元轴向应变和截面应变,这样可将由泊松效应引起的轴向弯曲变形高阶项与截面变形项区分出来,然后分别施加相应的弹性矩阵, 将泊松效应仅计入到轴向上,进而起到泊松闭锁缓解作用.缩减积分方法和弹性线方法都是从单元积分角度选择性地避开计算应变-应力关系的高阶耦合项,这两种方法适用于缓解单元的泊松和剪切闭锁;基于多场变分原理是从单元位移场角度引入单独的剪切场插值函数,从而消除横截面剪切变形与轴向拉伸和弯曲变形的耦合项,该方法主要用于解决单元的剪切闭锁问题;应变分解方法是从单元运动学角度将高阶耦合项解耦出来,从而仅将泊松效应施加在应变-应力关系的低阶线性项上,该方法用于解决单元的泊松闭锁问题. 对于ANCF/CRBF单元的泊松闭锁问题鲜有研究,对该单元闭锁问题的深入探讨是十分必要的,有助于提升单元的计算精度和确定单元的应用范围.
本文系统研究了ANCF/CRBF单元特有的泊松闭锁问题及其缓解技术.ANCF/CRBF梁单元的推导是通过对ANCF梁单元的节点处横截面施加运动学约束得到的.由于约束后的横截面不能变形, 消除了节点处的泊松闭锁,但是非节点处仍然存在泊松闭锁.这将导致ANCF/CRBF梁单元与ANCF梁单元不同的泊松闭锁特性,同时也使得泊松闭锁成为ANCF/CRBF单元主要的闭锁问题. 首先,为了全面地理解ANCF/CRBF梁单元特有的泊松闭锁特性以及深入探索施加运动学约束对ANCF/CRBF梁单元泊松闭锁特性的影响,在已有ANCF/CRBF刚性截面梁的基础上, 进一步对单元的轴向梯度进行约束,建立了两种新的刚性截面的ANCF/CRBF梁单元.新单元在节点处完全消除了泊松闭锁和剪切效应,这是与传统ANCF/CRBF刚性截面梁单元的不同之处. 然后, 采用两种闭锁缓解技术,弹性线方法和应变分解方法, 提升了ANCF/CRBF单元的收敛性和计算精度.以期为ANCF/CRBF这类单元的闭锁问题分析以及单元的应用范围提供参考数据.
1 传统的ANCF全参数平面梁单元
传统的ANCF全参数平面梁单元是绝对节点坐标方法中的经典单元,其采用统一的插值函数描述单元的平动和转动.该单元在运动过程中横截面与梁轴线不保持时刻垂直, 截面可变形.1.1 单元运动学描述
传统ANCF全参数平面梁单元$i$的位移场为[37]: ${r}^{i}(x,t)=$ $S^{i}(x){e}^{i}(t)$. 其中, ${r}^{i}(x,t)$是单元上任意一点在全局坐标系的位置向量, ${S}^{i}(x)$是单元的形函数,$\boldsymbol{e}^{i}(t)=\left[\left(\boldsymbol{e}^{i 1}\right)^{\mathrm{T}}\left(\boldsymbol{e}^{i 2}\right)^{\mathrm{T}}\right]^{\mathrm{T}}$是单元坐标向量. 对于梁单元$i$每个节点$k$上的坐标${e}^{ik}$可由节点位置向量${r}^{ik}$和梯度向量${r}_{x}^{ik}$, $r_{y}^{ik}$组成: ${e}^{ik}=\left[\left( {{r}^{ik}} \right)^{T}\ \ {\left({{r}_{x}^{ik} } \right)^{T}} \ \ {\left( {{r}_{y}^{ik} }\right)^{T}}\right]^{T}$, 其中$k=1,2$. 该单元自由度为12个,因此本文将其标记为ANCF12单元. 梁单元$i$的质量阵和外力阵分别为${M}^{i}=\rho^{i}\int_{V^{i}} {{S}^{iT}(x){S}^{i}(x){d}V^{i}}$和${Q}_{ex}^{i} =\int_{V^{i}} {{f,}_{ex}^{iT}{S}^{i}(x){d}V^{i}} $, 其中, $\rho ^{i}$和${f,}_{ex}^{i} $分别是单元$i$的密度和作用的外力.ANCF12单元采用统一的插值策略,这会导致梁的轴向弯曲变形高阶项与横向低阶变形高度耦合,产生严重的泊松闭锁问题, 致使计算精度下降. 此外,ANCF12单元采用梯度坐标描述单元的转动信息, 但是它的物理意义不如转角参数明确.
1.2 单元弹性力公式
根据连续介质力学理论(general continuum mechanics, GCM)定义,变形体可用三种构型描述, 分别为直构型、初始弯曲构型以及当前变形构型.如图1所示, 对于梁单元$i$, $V^{i}$, $V_{0}^{i} $ 和 $v^{i}$分别为直构型、初始弯曲构型以及当前变形构型下的体积. ${x}^{i}$,${X}^{i}$ 和 ${r}^{i}$对应三种构型下位置向量.根据图中的体积转换关系可以得到变形梯度张量${{J{}}}^{i}={{\partial {r}^{i}}/{\partial {X}^{i}}}=\left( {{{\partial {r}^{i}}/{\partial {x}^{i}}}} \right)\left( {{{\partial {x}^{i}}/{\partial {X}^{i}}}} \right)={{J{}}}_{e}^{i} {{J{}}}_{0}^{i-1} $.为了方便计算, 通常转换到直构型进行单元积分, 其转换关系为[21,38]${d}v^{i}=J^{i}{d}V_{0}^{i} =\left| {{{J{}}}_{e}^{i} {{J{}}}_{0}^{i-1}} \right|J_{0}^{i} {d}V^{i}=J_{e}^{i} {d}V^{i}$.图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1三种变形构型之间的关系
Fig. 1Three general configurations
梁单元$i$的Green-Lagrange应变张量${\boldsymbol \varepsilon}^{i}$可通过变形梯度张量${{J{}}}^{i}$得到
单元的弹性力为: ${Q}_{e}^{i} =-\int_{V^{i}} {\left( {{\partial {\boldsymbol \varepsilon }^{i} }/{\partial e^{i}}}\right)^{T}{E}^{i}{\boldsymbol \varepsilon }^{i}{d}V^{i}} $. 其中,${E}^{i}$是梁单元$i$的弹性系数矩阵, 可以表示为
其中, $\lambda ={{E\nu }/{\left[ {\left( {1+\nu } \right)\left({1-2\nu } \right)} \right]}}$, $\mu ={E/{\left[ {2\left( {1+\nu } \right)} \right]}}$; $E$是弹性模量, $\nu $是泊松比.
1.3 单元动力学方程
由虚功原理可知, 连续体上的虚功总和为零: $\delta W_{in}^{i} =\delta W_{ex}^{i} +\delta W_{e}^{i} $, 可得到$\left({{M}^{i}{\ddot{{e}}}^{i}-{Q}_{ex}^{i}+{Q}_{e}^{i} } \right)^{T}\delta {e}^{i}=\boldsymbol 0$,${\ddot{{e}}}^{i}$是单元加速度向量. 因此, 梁单元 $i$ 的动力学方程为2 ANCF/CRBF平面梁单元
传统ANCF全参数平面梁单元采用梯度坐标描述单元的转动信息,但是其物理意义不如转角参数明确,并且采用梯度坐标会使单元的广义坐标数目增多, 导致动力学计算效率降低.基于一致旋转场列式的ANCF/CRBF单元的提出可以解决以上问题.下面分别介绍已有的ANCF/CRBF平面梁单元,以及本文新开发的两种刚性截面ANCF/CRBF平面梁单元.2.1 传统的ANCF/CRBF刚性截面梁单元
ANCF/CRBF平面梁单元根据文献[32]定义, 以传统ANCF全参数平面梁为框架,对于梁单元$i$的节点 $k$, 建立$Y$方向梯度向量${r}_{y}^{ik}$与角度标量$\theta_{k}^{i} $的非线性约束方程为${r}_{y}^{ik}=\left[-\mbox{sin}\theta_{k}^{i} \ \ \mbox{cos}\theta_{k}^{i} \right]^{T}$, $k=1,2$. 对约束方程求时间的一阶导为${\dot{{r}}}_{y}^{ik} =\dot{{\theta }}_{k}^{i} \left[-\mbox{cos}\theta_{k}^{i} \ \ -\mbox{sin}\theta_{k}^{i} \right]^{T}$. 基于上述的约束方程一阶导,可得到ANCF单元坐标${e}^{i}$和ANCF/CRBF单元坐标${p}^{i}$在速度层面上的转换关系为${\dot{{e}}}^{i}={B}_{v1}^{i} {\dot{{p}}}^{i}$. 其中,${p}^{i}=\left[{{r}^{i1}}\ \ {{r}_{x}^{i1} }\ \ {\theta_{1}^{i}} \ \ {{r}^{i2}} \ \ {{r}_{x}^{i2} } \ \ {\theta_{2}^{i} } \right]^{T}$. 单元转换关系的格式可以参考文献[43]定义其中, ${B}_{v1}^{ik} =\left[ {{\begin{array}{*{20}c} {I_{4\times 4} } & {{\bf0}_{4\times 1} } \\ {{\bf0}_{2\times 4} } & {{a}_{k}^{i} } \\\end{array} }} \right]$. 梁单元$i$的节点$k$处的速度转换矩阵为${a}_{k}^{i} =\left[ {-\mbox{cos}\theta_{k}^{i} } \ \ {-\mbox{sin}\theta_{k}^{i} } \right]^{T}$, $k=1,2$. 该单元自由度为10个, 本文将其标记为ANCF/CRBF10单元. 由于仅对${r}_{y}^{i} $进行约束,并没有约束${r}_{x}^{i} $, 因此, ANCF/CRBF10单元为刚性截面单元,但是在节点处存在剪切变形. 该单元是在ANCF12单元的位移场插值函数的基础上开发得到的,因此具有与ANCF12单元相同的泊松闭锁问题.
2.2 ANCF/CRBF轴向不可伸展的刚性截面梁单元
在传统ANCF全参数平面梁的基础上对$X$和$Y$方向梯度向量${r}_{x}^{ik}$, ${r}_{y}^{ik} $施加正交矩阵约束,其中两个对梯度向量的非线性约束方程分别为${r}_{x}^{ik} =\left[ {\mbox{cos}\theta_{k}^{i} } \ \ {\mbox{sin}\theta_{k}^{i} } \right]^{T}$, ${r}_{y}^{ik} =\left[ {-\mbox{sin}\theta_{k}^{i} } \ \ {\mbox{cos}\theta_{k}^{i} } \right]^{T}$, $k=1,2$.这两个约束方程组成了节点截面处的正交矩阵, 使得节点截面不能变形. 下面,对约束方程求时间的一阶导数得到${\dot{{r}}}_{x}^{ik} =\dot{{\theta}}_{k}^{i} \left[ {-\mbox{sin}\theta_{k}^{i} }\ \ {\mbox{cos}\theta_{k}^{i} } \right]^{T}$,${\dot{{r}}}_{y}^{ik} =\dot{{\theta}}_{k}^{i} \left[ {-\mbox{cos}\theta_{k}^{i} } \ \ {-\mbox{sin}\theta_{k}^{i} } \right]^{T}$.对于单个节点, 有如下转换关系对于梁单元$i$的转换关系如下[43]
其中, ${B}_{v2}^{ik} =\left[ {{\begin{array}{*{20}c} {I_{2\times 2} } & {{\bf0}_{2\times 1} }\\ {{\bf0}_{4\times 2} } & {{b}_{k}^{i} } \\\end{array} }} \right]$. 梁单元$i$的节点$k$处速度转换矩阵为${b}_{k}^{i} =\left[ {-\sin\theta_{k}^{i} } \ \ {\cos\theta_{k}^{i} } \ \ {-\cos\theta_{k}^{i} } \ \ {-\sin\theta_{k}^{i} } \right]^{T}$, $k=1,2$, 以及${p}^{i}=\left[ {{r}^{i1}} \ \ {\theta_{1}^{i} } \ \ {{r}^{i2}}\ \ {\theta_{2}^{i} } \right]^{T}$. 该单元自由度为6个,因此本文将其标记为ANCF/CRBF6单元. ANCF/CRBF6单元同时对${r}_{x}^{i}$, ${r}_{y}^{i} $进行了限制, 梁单元节点处截面不会发生变形, 满足刚性截面假设, 消除了节点处的泊松闭锁. 另外, 节点处不存在剪切变形.
2.3 ANCF/CRBF轴向可伸展的刚性截面梁单元
本小节在ANCF/CRBF6单元的基础上, 添加$X$方向梯度向量${r}_{x}^{ik}$的轴向伸展系数$\alpha_{k}^{i} $, 这样处理的目的是确保梁在运动过程中可以捕捉到轴向伸展变形.梯度向量的非线性约束方程分别为${r}_{x}^{ik} =\alpha_{k}^{i} \left[ {\mbox{cos}\theta_{k}^{i} } \ \ {\mbox{sin}\theta_{k}^{i} } \right]^{T}$, ${r}_{y}^{ik} =\left[ {-\mbox{sin}\theta_{k}^{i} } \ \ {\mbox{cos}\theta_{k}^{i} }\right]^{T}$, $k=1,2$. 对约束方程求时间的一阶导数得到${\dot{{r}}}_{x}^{ik} =\dot{{\alpha }}_{k}^{i} \left[ {\mbox{cos}\theta_{k}^{i} } \ \ {\mbox{sin}\theta_{k}^{i} } \right]^{T}+ \alpha_{k}^{i} \dot{{\theta }}_{k}^{i}\left[ {-\mbox{sin}\theta_{k}^{i} } \ \ {\mbox{cos}\theta_{k}^{i} }\right]^{T}$和${\dot{{r}}}_{y}^{ik} =-\dot{{\theta}}_{k}^{i} \left[ {\mbox{cos}\theta_{k}^{i} } \ \ {\mbox{sin}\theta_{k}^{i} }\right]^{T}$. 对于单个节点, 有如下转换关系对于梁单元$i$的转换关系如下[43]
其中, ${B}_{v3}^{ik} =\left[ {{\begin{array}{*{20}c} {I_{2\times 2} } & {{\bf0}_{2\times 2} }\\ {{\bf0}_{4\times 2} } & {{c}_{k}^{i} } \\\end{array} }} \right]$. 梁单元$i$的节点$k$ ($k=1,2$)处速度转换矩阵为
${p}^{i}=\left[ r^{i1} \ , {\alpha_{1}^{i} } \ , {\theta_{1}^{i} }\ , {{r}^{i2}} \ , {\alpha_{2}^{i} } \ , {\theta_{2}^{i} } \right]^{T}.$ 该单元自由度为8个,因此本文将其标记为ANCF/CRBF8单元. ANCF/CRBF8单元对${r}_{x}^{i}$, ${r}_{y}^{i}$约束, 但允许梁轴向可以伸展,因此该单元节点处的截面不会发生变形, 节点处没有泊松闭锁以及剪切变形.但是单元能捕捉到轴向伸展变形.
ANCF/CRBF单元的轴向伸展系数选取是以对应的ANCF单元梯度向量${r}_{x}^{ik}$初始值为标准所确定的. 例如, 在初始构型下单元不存在拉伸时,单元的梯度向量初始值为${r}_{x}^{ik} =[1\ \ 0]^{T}$, 通过公式${r}_{x}^{ik} =\alpha_{k}^{i}[ {\mbox{cos}\theta_{k}^{i} } \ \ {\mbox{sin}\theta_{k}^{i} } ]^{T}$可确定ANCF/CRBF平面梁单元的伸展系数$\alpha_{k}^{i} $初始值为1. 在初始构型下单元存在拉伸时,单元的梯度向量初始值为${r}_{x}^{ik} =\left[ {\alpha_{k1}^{i} } \ \ {\alpha_{k2}^{i} } \right]^{T}$, 可写为${r}_{x}^{ik} =\alpha_{k1}^{i}[ 1 \ \ 0]^{T}+\alpha_{k2}^{i} [ 0 \ \ 1 ]^{T}$, 并表示为${r}_{x}^{ik} =\alpha_{k1}^{i}\left[ {\mbox{cos}\theta_{k}^{i} } \ \ {\mbox{sin}\theta_{k}^{i} } \right]^{T}+\alpha_{k2}^{i} \left[{-\mbox{sin}\theta_{k}^{i} } \ \ {\mbox{cos}\theta_{k}^{i} } \right]^{T}$此时的伸展系数初始值分别为$\alpha_{k1}^{i}$, $\alpha_{k2}^{i} $. 伸展系数是时变参数, 用于捕捉轴向变形.
2.4 单元动力学方程
依据速度转换关系${\dot{{e}}}^{i}={B}_{vj}^{i}{\dot{{p}}}^{i}$, $j=1,2,3$,得到其对时间的二阶导数${\ddot{{e}}}^{i}={B}_{vj}^{i}{\ddot{{p}}}^{i}+{\dot{{B}}}_{vj}^{i} {\dot{{p}}}^{i}$. 将二阶导数代入式(3), 并左乘非线性速度转换矩阵的转置${B}_{vj}^{iT}$, 整理得到其中${\boldsymbol \gamma }^{i}={\dot{{B}}}_{vj}^{i}{\dot{{p}}}^{i}$. 那么, ANCF/CRBF梁单元的质量阵为${\bar{{M}}}^{i}={B}_{vj}^{iT}{M}^{i}{B}_{vj}^{i} $, 它是高度非线性的, 这与ANCF梁单元的常质量阵不同.外力阵为${\bar{{Q}}}^{i}={B}_{vj}^{iT} \left({{Q}^{i}-{M}^{i}\gamma^{i}} \right)$,以及新单元的动力学方程为${\bar{{M}}}^{i}{\ddot{{p}}}^{i}={\bar{{Q}}}^{i}$.
值得注意的是, ANCF/CRBF单元计算转角是通过积分角度对时间的导数得到的,而非积分角速度. 分空间和平面两种情况进行讨论.
(1) 在空间情况下, 以全参数ANCF梁单元与ANCF/CRBF梁单元转换为例, 其速度层面的转换关系为[31,44-45]
其中, ${\boldsymbol \theta }_{k}^{i} ={\boldsymbol \theta }_{k}^{i} \left({\phi ,\theta ,\psi } \right)$. $\phi ,\theta ,\psi$是分别绕三轴转动的角度信息, 例如欧拉角.${A}^{ik}={{J{}}}^{ik}=\left[ {{r}_{x}^{ik} } \ \ {{r}_{y}^{ik} } \ \ {{r}_{z}^{ik} } \right]$为单元$i$节点$k$上的正交转动矩阵. ANCF/CRBF的角速度为${\boldsymbol \omega }_{k}^{i} ={G\dot{{\theta}}}_{k}^{i} $, ${G}$为包含转动方向参数的矩阵. 通过计算式(11)对时间的导数, 得到加速度层面的转换关系
在计算ANCF/CRBF单元转角时是对角度的时间导数${\dot{{\boldsymbol \theta }}}_{k}^{i} $, ${\ddot{{\boldsymbol \theta }}}_{k}^{i} $积分得到的,而不是对角速度${\boldsymbol \omega }_{k}^{i} $积分.
(2) 在平面情况下, 式(11)中的角度向量简化为式(5), 单元的转角和角速度简化为$\theta_{k}^{i} $和$\omega_{k}^{i}=\dot{{\theta }}_{k}^{i} $, 其中${G}$为单位阵. 单元转角的计算也是通过对角度的时间导数$\dot{{\theta }}_{k}^{i} $积分获得.
另外, Shabana等[51]近期在Chinese Journal of Theoretical and Applied Mechanics上在线发表了长文综述,对单元空间转动进行了阐述. 文中指出ANCF/CRBF单元可在小转动假设下进一步推导出ANCF/FFR单元. 例如,在小转动假设下, ANCF/CRBF单元中的转动矩阵${A}^{ik}$近似为${A}^{ik}={I}+{\tilde{{\boldsymbol \theta}}}_{k}^{i} $. 对于单元$i$的节点$k$, 其梯度坐标矩阵可表示为${{J{}}}_{e}^{ik}={A}^{ik}{{J{}}}_{0}^{ik} =\left( {{I}+{\tilde{{\boldsymbol \theta }}}_{k}^{i} }\right){{J{}}}_{0}^{ik} $, 其中${{J{}}}_{0}^{ik} $定义了单元的参考几何构型. 该矩阵对时间的导数为${\dot{{{J{}}}}}_{e}^{ik} ={\tilde{{\dot{{\boldsymbol \theta}}}}}_{k}^{i} {{J{}}}_{0}^{ik} =-\left[ {{\tilde{{{J{}}}}}_{01}^{ik} } \ \ {{\tilde{{{J{}}}}}_{02}^{ik}} \ \ {{\tilde{{{J{}}}}}_{03}^{ik} } \right]{\dot{{\boldsymbol \theta }}}_{k}^{i} $. 此时,ANCF/FFR单元在速度层面的转换关系为[52]
文中还指出ANCF/FFR单元虽然可准确描述初始弯曲构型,有利于开发一种基于力学的计算机辅助设计和分析(I-CAD-A)融合方法. 但是,由于引入了小转动坐标会导致这类单元不能精确地表示刚体惯性,会影响单元的动力学精度.因此对ANCF/FFR单元的闭锁缓解技术研究可作为下一步研究的方向.
3 单元闭锁缓解技术
ANCF全参数平面梁单元存在着严重的泊松闭锁问题, 会严重影响单元的计算精度.针对如何缓解ANCF单元泊松闭锁问题, 已有大量地研究,其中典型的方法有弹性线方法和应变分解方法. 本节对两种方法进行逐一介绍.3.1 弹性线方法
由弹性线方法(ECL)可知[21,35], 应变势能通过对沿中心轴线 $x^{i}$积分得到, 由轴向拉伸势能$U_{a}^{i} $, 剪切势能$U_{s}^{i}$和横向弯曲势能$U_{b}^{i} $组成其中, $E,G,A,I$分别是弹性模量、剪切模量、横截面面积和截面惯性矩. 剪切模量表示为$G=E/[2\left( {1+\nu } \right)]$.$A_{s} =k_{s} \cdot A$, 其中, $k_{s} $ 是剪切修正因子. 对于横截面是矩形的情况,$k_{s} ={{10\left( {1+\nu } \right)}/{\left( {12+11\nu } \right)}}$. 对于轴向应变$\varGamma_{1}^{i} $、剪切应变$\varGamma_{2}^{i} $、及曲率公式$\kappa^{i}$分别可表示为
其中, $\varGamma_{2}^{i} $ 中的第二项$\left[ {{r}_{y} ^{iT}\left( {x^{i},0} \right){r}_{y}^{i}\left( {x^{i},0} \right)-1}\right]\Big/2$是限制${r}_{y}^{i} $剧烈变化, 确保单元的不可压缩性.由应变势能可得弹性力公式
在弹性线方法中, 由于仅对梁轴向中心线进行积分,一定程度上可以缓解由高阶弯曲变形和低阶横向变形耦合引起的闭锁问题.弹性线方法适合用于计算较薄的直梁结构.
3.2 应变分解方法
由应变分解方法(SSM)可知[36], 对于梁单元 $i$, 其位置和梯度向量可分解为其中, ${r}^{iC}={S}^{i}\left({x^{i},0} \right){e}^{i}$, $r_{x}^{iC} ={S}_{x}^{i}\left( {x^{i},0} \right){e}^{i}$. 于是,梁单元梯度矩阵在单元坐标系内可写成
其中, 分离出来的两个矩阵$\boldsymbol{J}_{e}^{i \mathrm{C}} = \boldsymbol{r}_{x}^{i \mathrm{C}} \boldsymbol{r}_{y}^{i}, \boldsymbol{J}_{e}^{i \mathrm{S}} = y^{i} \boldsymbol{r}_{y x}^{i} \quad \mathbf{0}$, 分别对应梁轴向变形和截面变形.将式(18)代入式(1), 单元的Green-Lagrange应变张量$\varepsilon^{i}$可改写为
其中
依据Voigt标记规则, 可写为
对于ANCF全参数平面梁单元, 从式(20)分析得知, 其弯曲变形的高阶项在单元非轴向分应变${\boldsymbol \varepsilon }^{iS}$中,会产生伪应力, 这是导致单元泊松闭锁的原因. 因此, 在求解第二类Piola-Kirchhoff应力时对两个Green-Lagrange分应变${\boldsymbol \varepsilon}^{iC}$, $\boldsymbol \varepsilon ^{iS}$分别施加不同的弹性矩阵, 可表示为${\boldsymbol \sigma }={E}^{iC}{\boldsymbol \varepsilon}^{iC} +{E}^{iS}{\boldsymbol \varepsilon }^{iS} $, 其中弹性矩阵分别为
由式(22)可以看出,应变分解方法将泊松效应仅施加在低阶轴向分应变${\boldsymbol \varepsilon }^{iC}$上,可有效地将梁横截面低阶正应变与由弯曲变形高阶项引起的伪应变分离开来,使得泊松效应充分地体现在低阶正应变中, 有效地缓解了ANCF梁单元泊松闭锁问题.在应变分解方法中, 梁单元的弹性力向量可计算为
4 算例分析
本文设计5种算例用于全面测试新单元的性能, 分别是小变形细长梁静力学算例、大变形深梁静力学算例、悬臂梁末端受弯矩静力学算例、悬臂梁受重力动力学算例和柔性单摆动力学算例.此外, 本文还对两种闭锁缓解技术应用在新单元上的效果进行研究. 为了方便对比分析, 仿真中的模型可归纳为10种类型, 分别是:(1) ANCF12-GCM (传统ANCF全参数梁单元 $+$ 连续介质力学);
(2) ANCF/CRBF10-GCM (传统刚性截面ANCF/ CRBF梁单元 $+$ 连续介质力学);
(3) ANCF/CRBF10-ECL (传统刚性截面ANCF/ CRBF梁单元 $+$ 弹性线方法);
(4) ANCF/CRBF10-SSM (传统刚性截面ANCF/ CRBF梁单元 $+$ 应变分解方法);
(5) ANCF/CRBF8-GCM (轴向可伸展的刚性截面ANCF/ CRBF梁单元 $+$ 连续介质力学);
(6) ANCF/CRBF8-ECL (轴向可伸展的刚性截面ANCF/ CRBF梁单元 $+$ 弹性线方法);
(7) ANCF/CRBF8-SSM (轴向可伸展的刚性截面ANCF/ CRBF梁单元 $+$ 应变分解方法);
(8) ANCF/CRBF6-GCM (轴向不可伸展的刚性截面ANCF/ CRBF梁单元 $+$ 连续介质力学);
(9) ANCF/CRBF6-ECL (轴向不可伸展的刚性截面ANCF/ CRBF梁单元 $+$ 弹性线方法);
(10) ANCF/CRBF6-SSM (轴向不可伸展的刚性截面ANCF/ CRBF梁单元 $+$ 应变分解方法).
根据第2节和第3节对绝对节点坐标全参数梁和基于一致旋转场的绝对节点坐标梁单元的描述,详细分析各类型单元泊松闭锁的特点.
(1) ANCF12-GCM
① 轴向可伸展、截面可变形;
② 旋转描述中无转角参数, 仅有梯度向量;
③ 节点处存在剪切变形;
④ 截面无约束, 节点处和单元内均有泊松闭锁.
(2) ANCF/CRBF10-GCM
① 轴向可伸展、截面不可变形;
② 旋转描述中既有转角参数又有梯度向量;
③ 节点处存在剪切变形;
④ 节点截面全约束, 节点处无泊松闭锁, 单元内存在泊松闭锁. 这种不连续情况导致单元整体的泊松闭锁问题相较ANCF12单元更加严重.
(3) ANCF/CRBF8-GCM
① 轴向可伸展、截面不可变形;
② 旋转描述中仅有转角参数;
③ 节点处不存在剪切变形;
④ 节点截面全约束, 节点处无泊松闭锁, 单元内存在泊松闭锁. 此外, 节点处无剪切变形, 单元内存在剪切变形. 这种不连续情况导致单元整体的泊松闭锁相较ANCF10单元更加严重.
(4) ANCF/CRBF6-GCM
① 轴向不可伸展、截面不可变形;
② 旋转描述中仅有转角参数;
③ 节点处不存在剪切变形;
④ 节点截面全约束, 节点处无泊松闭锁, 单元内存在泊松闭锁. 此外, 单元轴线不能伸展. 这会导致单元整体的泊松闭锁相较ANCF8单元更加严重.
4.1 静力学测试: 小变形细长梁算例
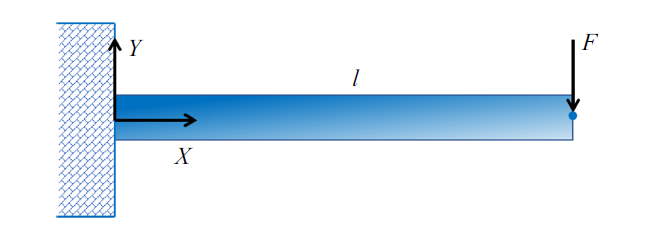
该算例为典型的悬臂梁受集中载荷问题, 考察ANCF/CRBF单元在小变形静力学分析中的准确性. 图2所示为悬臂梁.梁的参数分别为长度$l=1$ m, 高度和厚度$h=w=0.01$ m,弹性模量$E=200$ GPa, 泊松比$\nu =0.3$, 以及末端集中力设为 $F=-10$ N. 采用Newton-Raphson迭代求解其非线性方程组,相对误差设置为$RelT=10^{-6}$. $Y$方向位移具有理论解为 $\delta =-0.02$ m.图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图2悬臂梁模型
Fig. 2Cantilever beam
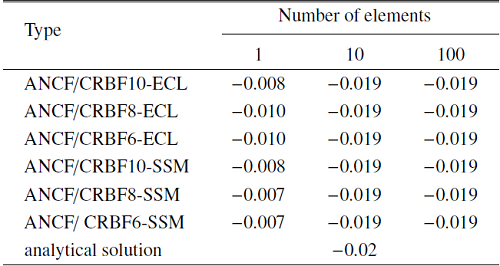
表1为不同单元类型采用连续介质力学方法时计算的$Y$向位移. 首先,发现ANCF12单元、ANCF/CRBF10单元、ANCF/CRBF6和ANCF/CRBF8单元均不能收敛到理论解,这是因为采用连续介质力学方法计算的弹性力会造成轴向和截面的正应变高度耦合,使得泊松效应更加地明显. 其次,ANCF全参数平面梁单元和ANCF/CRBF单元在小变形静力学问题上表现相当.表2为不同单元类型采用闭锁缓解方法时计算的$Y$向位移.以ANCF/CRBF10单元作为参考解,可以发现ANCF/CRBF6和ANCF/CRBF8单元的计算精度低于参考解.这是因为这两个单元都对节点处梯度向量进行了正交约束,可捕捉到的截面变形类型减少, 所以计算精度不如传统ANCF全参数单元. 此外,约束截面虽然可以消除节点处的泊松闭锁, 但单元内的截面可以变形,仍然存在闭锁问题.图3所示为ANCF/CRBF8单元采用三种弹性力计算方式下的$Y$向位移误差收敛率,可以发现在小变形情况下, 采用弹性线方法或应变分解法时的收敛率相当.由于本算例的特色为细长梁, 截面变形小, 泊松闭锁问题不明显.下一个算例将采用深梁模型进一步研究单元的闭锁问题.
Table 1
表1
表1小变形情况下Y向位移对比(m)
Table 1
 |
新窗口打开|下载CSV
Table 2
表2
表2小变形情况下Y向位移对比(使用闭锁缓解技术) (m)
Table 2
 |
新窗口打开|下载CSV
图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3ANCF/CRBF8单元$Y$向位移相对误差
Fig. 3Relative error of tip vertical displacement of ANCF/CRBF8 beam in case of small deformation
4.2 静力学测试: 大变形深梁算例
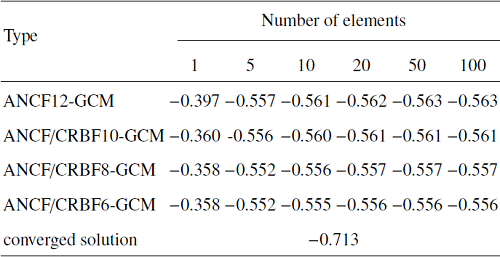
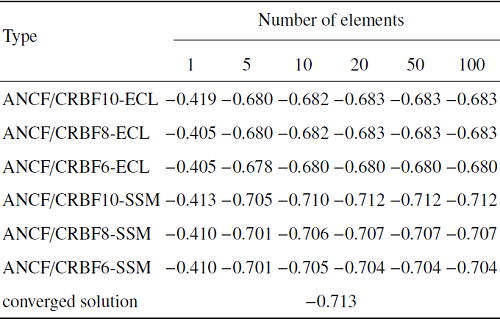
本算例采用深梁模型, 如图2所示. 梁的参数分别为长度$l=2$ m,高度$h=0.5$ m和厚度$w=0.1$ m, 弹性模量$E=207$ GPa, 以及泊松比$\nu =0.3$. 由于深梁的横截面有着较大的变形,可完全捕捉泊松效应, 因此单元的泊松闭锁问题更加严重, 该算例常被用于测试单元受较大变形时的静力学计算精度. 为了验证大变形算例,设置末端集中力为$F=-5.0\times 10^{8}\times h^{3}$ N, 与文献[33]中的参数相同. 采用Newton-Raphson迭代求解其非线性方程组,相对误差设置为$RelT=10^{-6}$. 本算例中的参考解为采用商业有限元软件ANSYS计算的数值收敛解 $\delta =-0.713,420$ m.表3为不同单元类型采用连续介质力学方法时计算的$Y$向位移. 首先,以传统ANCF12单元作为参考, 发现ANCF/CRBF单元由于对梯度向量施加了约束,消除了部分的变形模态, 因此其计算精度不如ANCF12单元. 其次,发现两种刚性截面的ANCF/CRBF单元的计算精度不如ANCF/ANCF10单元. 对于深梁结构,由于长宽比较小, 梁内部的泊松闭锁更加严重,导致ANCF/CRBF单元的静力学计算精度更差. 另外, 在ANCF/CRBF单元中,对梯度向量约束的越多, 静力学计算精度越差. 因此, 相比ANCF全参数梁单元,ANCF/CRBF单元不具有静力学计算优势, 特别是对于大变形深梁结构.表4为不同单元类型采用闭锁缓解方法时计算的$Y$向位移.对比发现仅有应变分解法计算的结果可收敛到数值解.图4所示为ANCF/CRBF8单元的$Y$向位移误差收敛率, 发现在大变形情况下,应变分解法的收敛率最好. 对于大变形深梁模型, 截面泊松效应明显,应变分解法可将梁轴线方向正应变和截面方向正应变分解,可完全解除轴向高阶弯曲变形和截面低阶变形间的高度耦合关系,泊松效应仅计入在轴向正应变上. 而弹性线方法仅可去除掉一些不重要的高阶项,但不能将轴向和截面变形解耦, 单元仍然存在一定程度上的泊松闭锁,因此计算精度不如应变分解法的计算精度高.
Table 3
表3
表3大变形情况下Y向位移对比(m)
Table 3
 |
新窗口打开|下载CSV
Table 4
表4
表4大变形情况下Y向位移对比(使用闭锁缓解技术) (m)
Table 4
 |
新窗口打开|下载CSV
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4ANCF/CRBF8单元$Y$向位移相对误差
Fig. 4Relative error of tip vertical displacement of ANCF/CRBF8 beam in case of large deformation
4.3 静力学测试: 悬臂梁受端部集中力矩算例
本算例验证ANCF/CRBF梁单元在强几何非线性静力学分析中的有效性, 如图5所示.梁的参数分别为长度$l=10$ m, 高度$h=0.1$ m和厚度$w=0.1$ m,弹性模量$E=210$ GPa, 以及考虑泊松效应, 泊松比设为$\nu =0.3$, 与参考文献[18]相同. 在梁的末端所施加的理论力矩为$M={{\pi EI}/l}$. 该算例具有理论解, 当$M=2{{\pi EI}/l}$时, 直梁最终被弯曲成一个圆. 采用牛顿迭代法求解, 相对误差设置为$10^{-6}$, 载荷迭代步数设为20. 本算例弹性力的计算采用应变分解方法. 分别采用ANCF12, ANCF/CRBF10, ANCF/CRBF8和ANCF/CRBF6模拟悬臂梁.为了全面测试ANCF/CRBF单元承受弯曲的情况, 所加载的弯矩由小到大, 并分为多组进行测试.图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5悬臂梁末端受集中力矩作用
Fig. 5Cantilever beam subjected by a torque
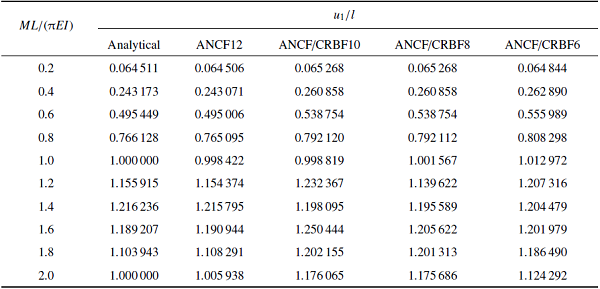
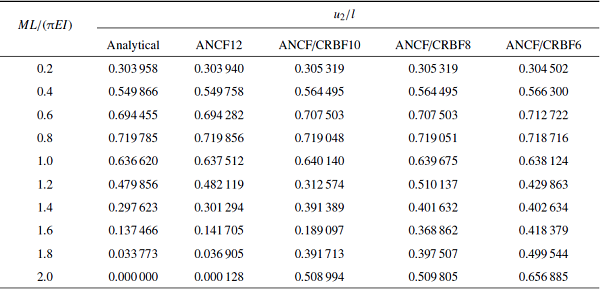
对于该强几何非线性静力学算例, 对比表5和表6发现: 首先, ANCF单元由于存在闭锁问题,测试发现采用40个单元划分梁模型才使得悬臂梁被弯成整圆(所受力矩为${{ML}/({\pi EI}})=2$时). 其次, 对三种ANCF/CRBF单元进行测试, 采用与ANCF单元弯成整圆相同的单元数,发现ANCF/CRBF单元在受载小弯矩时的结果与理论解相近(${{ML}/({\pi EI}})=0.2$$\sim$1.0). 当弯矩增大,ANCF/CRBF单元的结果开始与理论解呈现较大的偏差(${{ML}/({\pi EI}})=1.2$$\sim$2.0). 图6是ANCF单元和ANCF/CRBF单元在所受力矩为${{ML}/({\pi EI}})=2$时的构型图.
Table 5
表5
表5梁末端X向位移对比(m)
Table 5
 |
新窗口打开|下载CSV
Table 6
表6
表6梁末端Y向位移对比(m)
Table 6
 |
新窗口打开|下载CSV
图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6悬臂梁受端部集中力矩下的构型图(40个单元)
Fig. 6Cantilever beam configurations subjected by a torque (40 elements)
深入分析发现, 造成ANCF/CRBF单元在承受较大弯矩时数值精度较差的原因是由于引入ANCF/CRBF单元引起的.这是因为ANCF/CRBF单元角度的引入是通过对单元$Y$向梯度向量施加约束实现的, ${r}_{y}^{i1} ={a}_{1} =\left[ {-\mbox{sin}\theta_{1}^{i} } \ \ {\mbox{cos}\theta_{1}^{i} } \right]^{T}$和${r}_{y}^{i2} ={a}_{2}=\left[ {-\mbox{sin}\theta_{2}^{i} }\ \ {\mbox{cos}\theta_{2}^{i} } \right]^{T}$. 这隐含地要求了${r}_{y}^{i}$需保持单位向量. 但是对于ANCF/CRBF单元, 其截面$Y$方向的梯度插值为低阶线性,即${r}_{y}^{i} =\left( {1-\xi } \right){a}_{{1}} +\xi {a}_{{2}} $. 于是有${r}_{y}^{iT} {r}_{y}^{i} =1+2\left( {1-\xi } \right)\xi \left( {{a}_{1}^{T} {a}_{2} -1} \right)$, 该公式表示了梯度${r}_{y}^{i} $不会一直等于1, 不能保证单位向量. 其最大的偏离量在梁单元的中点$\left( {\xi =0.5} \right)$.
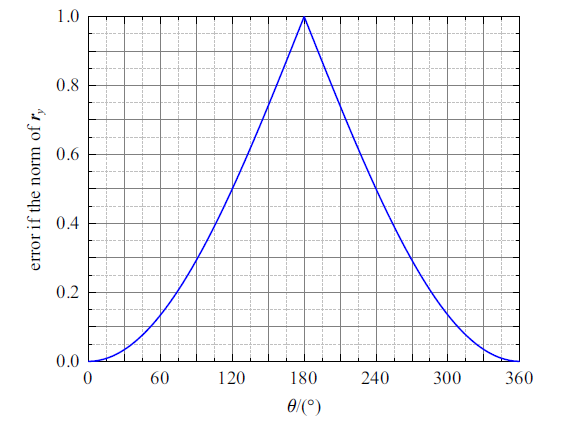
根据从文献[45]可知, 只有单元上两个节点之间的相对转动不超过$30^{\circ }$时, 得到的${r}_{y}^{i} $可认为是单位向量, 从而ANCF/CRBF单元才有效. 可以通过以下的计算证明: 例如让单元的一个节点处的转角为$0^{\circ }$, 另一个节点处的转角从$0^{\circ }$变化到$360^{\circ }$, 计算$\xi =0.5$处的${r}_{y}^{i} $范数中的误差, 如图7所示. 可以得到,在两个节点相对转角为$30^{\circ }$时, 误差为0.034, 与文献[45]中的结论相符. 此时ANCF/CRBF单元的${r}_{y}^{i} $可近似认为单位向量, 并且单元有效. 但是当相对转角继续增大时, ${r}_{y}^{i} $范数的误差也随之增大, 这也解释了ANCF/CRBF这类单元在承受较大力矩时计算精度差的原因.
图7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图7$r_{y}$范数的误差
Fig. 7Error of the norm of $r_{y}$
4.4 动力学测试: 悬臂梁受重力作用算例
本小节采用文献[39]中的悬臂深梁受到重力作用的算例,该算例专门用于分析泊松闭锁问题对单元动力学特性的影响, 如图8所示.本算例弹性力的计算分别采用连续介质力学方法、弹性线方法和应变分解方法.悬臂梁的参数分别为长度$l=1$ m, 高度和厚度$h=0.1$ m, $w=0.07$ m,弹性模量$E=60$ MPa, 密度$\rho =7200$ kg/m$^{3}$,以及泊松比$\nu =0.3$. 在重力作用下, 悬臂梁在$XY$平面内往复运动,仿真时间为1 s. 柔性梁被划分为10个单元. 采用显式积分方法,轴向和横向的高斯积分点分别为5个和3个.图8
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图8悬臂梁动力学模型
Fig. 8Cantilever beam dynamic problem
图9为梁末端端点处$X$方向位移变化.可以看到当单元采用连续介质力学方法计算的弹性力时, 单元泊松闭锁问题严重.当采用两种闭锁缓解技术均可以缓解闭锁问题.从静力学分析和本小节的动力学分析可以得到,应变分解方法既适用于细长梁结构也适用于深梁结构, 是最有效的方法,而弹性线方法更适用于模拟细长梁结构.
图9
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图9梁端点处 $X$方向位移变化
Fig. 9Tip horizontal displacement of the cantilever beam
4.5 动力学测试: 柔性单摆算例
本小节采用经典的柔性单摆算例分析ANCF/CRBF10、ANCF/CRBF8和ANCF/CRBF6三种单元的动力学特性,如图10所示. 根据前面静力学分析的结论, 本算例弹性力的计算采用应变分解方法.单摆的参数分别为长度$l=1$ m, 高度和厚度$h=w=0.02$ m,弹性模量$E=20$ MPa, 密度$\rho =7200$ kg/m$^{3}$,以及泊松比$\nu =0.3$. 在重力作用下, 单摆在$XY$平面内运动,仿真时间为2 s. 采用20个ANCF/CRBF单元模拟.采用商业有限元软件LS-DYNA中的Belytschko-Schwer beam (BS beam)单元作为对比[40], 采用30个BS beam单元模拟. 另外,为最大程度上保证自编程序和有限元软件的一致性, 均采用显式积分方法,这样可以避免采用隐式积分算法时的数值阻尼对计算结果的影响. 此外,自编程序和有限元软件在截面方向的高斯积分点的选取均为3个.图10
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图10柔性单摆模型
Fig. 10Flexible pendulum
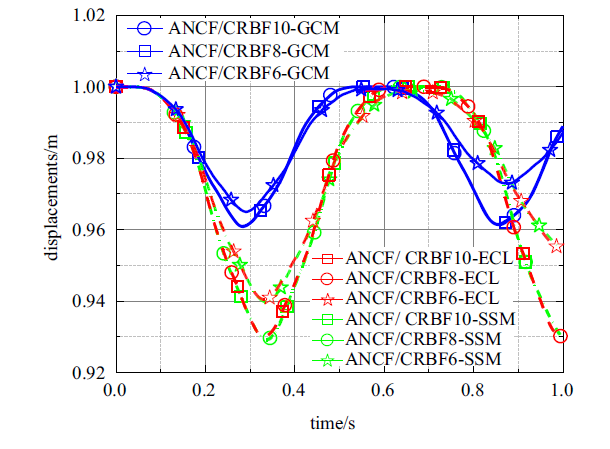
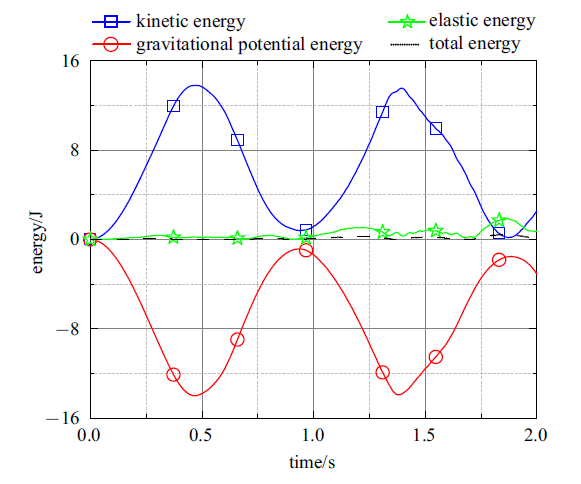
图11为梁末端端点处$Y$方向位移变化,可以看出ANCF/CRBF10和ANCF/CRBF8单元计算的结果与LS-DYNA软件计算的结果有较好的吻合度, 验证了单元在大范围刚体运动时可准确描述弹性变形的能力.而ANCF/CRBF6单元由于轴向不能伸展, 计算结果错误, 不适用于模拟大变形梁问题.图12是ANCF/CRBF8单元的能量变化曲线. 可以看出单元能量守恒,从能量的角度验证了模型的正确性. 图13是梁中心点处轴向应变变化情况.ANCF/CRBF10单元和ANCF/CRBF8单元轴向均可以伸展, 数值变化较为吻合,而ANCF/CRBF6单元完全约束了轴向变形, 因此无轴向应变变化. 另外可以发现LSDYNABS beam单元轴向应变与ANCF/CRBF梁单元轴向应变的变化趋势相同,但是幅值稍微偏大. 这可以归因于四点: 第一, LSDYNA BSbeam单元与ANCF/CRBF梁单元采用了根本不同的位移场插值策略.ANCF/CRBF梁单元选择对轴向和截面方向采用统一的插值策略,使得轴向、弯曲和剪切变形模态高度耦合, 导致了系统刚度的上升,造成了轴向应变的减小. LSDYNA BS beam单元基于共旋坐标法,对位移和转动采用了独立插值的策略, 各个变形模态不会产生高度耦合现象,单元的系统刚度小于ANCF/CRBF梁单元, 所以轴向应变变化较大. 第二, LSDYNA BSbeam单元与ANCF/CRBF单元采用不同的坐标系统.由于ANCF/CRBF10单元含有梯度向量以及ANCF/CRBF8单元含有伸展系数,因此在进行边界转动副约束时也与LSDYNA BS beam单元的边界约束条件不同. 第三,LSDYNA BS beam单元和ANCF/CRBF单元的求解过程不同. LSDYNA软件采用增量求解过程,而ANCF/CRBF采用非增量求解过程. 第四,两种模型采用的显示积分方法分别为MATLAB和LSDYNA软件自设的算法,在误差判断和步长选择上有所差异, 随着模拟时间的延长,两种解之间的差异是可以预见的.
图11
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图11梁端点处 $Y$方向位移变化
Fig. 11Tip vertical displacement of the flexible pendulum
图12
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图12ANCF/CRBF8单元能量变化
Fig. 12Energy change of ANCF/CRBF8 element
图13
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图13梁中点轴向应变变化
Fig. 13Axial strain change of beam middle point
图14是梁中心点处剪切应变变化情况.由于ANCF/CRBF8单元和ANCF/CRBF6单元节点处同时施加了轴向和截面方向的运动学约束,因此节点处不存在剪切变形. ANCF/CRBF10单元仅约束了截面的变形,未约束截面与轴线的转动, 因此节点处存在剪切效应.
图14
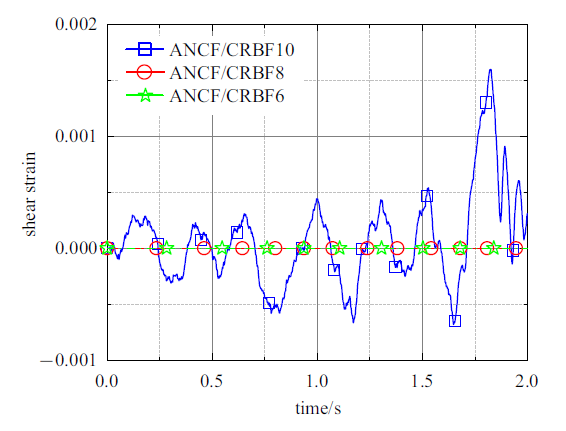 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图14梁中点剪切应变变化
Fig. 14Shear strain change of beam middle point
相比传统ANCF/CRBF10单元, 本文构造的ANCF/CRBF8和ANCF/CRBF6单元的自由度更少,使得模型维度更低. 例如, 在柔性单摆算例中,ANCF/CRBF10, ANCF/CRBF8和ANCF/CRBF6单元建立的模型自由度分别为105, 84和63,仿真时间分别为139.2 min, 121.3 min和48.7 min(仿真环境为16 GB内存, IntelCore i7计算平台). 此外, 相比传统ANCF/CRBF10单元,本文构造的ANCF/CRBF8和ANCF/CRBF6单元坐标没有梯度向量,可直接对其转角参数施加运动约束或力约束, 便于面向旋转的设计操作.
汤惠颖等[46]基于李群SE(3)局部标架, 研究了几类梁单元的闭锁缓解方法.文中分别采用Hu-Washizu三场变分原理和应变分解法,缓解了SE(3)局部标架几何精确梁单元的剪切闭锁和绝对节点坐标梁单元的泊松闭锁,提升了单元的计算精度. 对比本文与文献[46]可以发现: (1)文献[46]的特点是引入李群SE(3)局部标架,可消除刚体运动带来的几何非线性[47], 极大地减少迭代矩阵的更新次数,有效地提升了计算效率; 本文的特点是引入单元截面的运动约束,可消除截面处的泊松闭锁, 缩减了单元的自由度,在低维动力学问题上提升了计算效率. (2)文献[46]与本文均采用应变分解法处理绝对节点坐标单元的泊松闭锁问题,在静力学和动力学问题上的计算精度均得到了较好地提升.
另外,汤惠颖等[46]发现高阶几何精确梁单元比低阶几何精确梁单元的计算精度高.这可启发本研究进一步拓展到绝对节点坐标高阶梁研究方面,例如三维三节点梁单元[48]和三维高阶梁单元[49-50].由于绝对节点坐标高阶梁没有闭锁问题,因此可结合本文的一致旋转场列式方法开发出精度较高的三维ANCF/CRBF高阶梁单元.
5 结论
本文系统地研究了基于一致旋转场列式的绝对节点坐标平面梁单元的泊松闭锁问题.文中首先开发了两种刚性截面的绝对节点坐标平面梁单元ANCF/CRBF8和ANCF/CRBF6,并对比了泊松闭锁问题在新单元与已有ANCF/CRBF10梁单元上的特点. 随后,结合两种闭锁缓解技术, 弹性线方法和应变分解方法, 研究了单元的收敛性.通过典型的静力学和动力学算例测试了泊松闭锁问题对 ANCF/CRBF单元性能的影响,可得到以下结论:(1) 对比ANCF全参数梁单元, ANCF/CRBF单元对节点梯度向量进行了约束,导致节点处不能完全捕捉泊松效应, 但单元内部可以完全捕捉泊松效应,这种不连续情况会加重单元整体的泊松闭锁问题, 极大地降低静力学计算精度.ANCF/CRBF单元不具有静力学的计算优势,特别是在单元受集中力矩的强几何非线性情况.
(2) 对比三种ANCF/CRBF单元, 对节点梯度向量约束的越多,导致计算深梁结构的静力学精度越差. 对于长宽比较大的细长梁结构,梁的弯曲变形不会导致轴向伸展, 刚性截面致使整体单元近似满足欧拉梁假设.
(3) 在ANCF/CRBF单元的基础上结合应变分解方法,可以更加有效地缓解单元泊松闭锁问题, 动力学计算结果具有良好的精度,ANCF/CRBF单元更适用于模拟动力学问题.
参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
//
[本文引用: 1]
//
[本文引用: 1]
[本文引用: 1]
3rd ed.
[本文引用: 3]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 2]
[本文引用: 2]
[本文引用: 2]
[本文引用: 1]
//
[本文引用: 3]
[本文引用: 2]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
//
[本文引用: 3]
[本文引用: 1]
[本文引用: 3]
[本文引用: 5]
[本文引用: 5]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}