 ,2), 陈阵, 谷正气,3), 张勇湖南大学汽车车身先进设计制造国家重点实验室,长沙 410082
,2), 陈阵, 谷正气,3), 张勇湖南大学汽车车身先进设计制造国家重点实验室,长沙 410082RESEARCH ON IMPROVEMENTS OF LRN TURBULENCE MODEL BASED ON FLOW AROUND AUTOMOBILE BODY 1)
Qiang Guanglin, Yang Yi,2), Chen Zhen, Gu Zhengqi,3), Zhang YongState Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Hunan University,Changsha 410082,China通讯作者: 2)杨易,副教授,主要研究方向:汽车空气动力学、汽车系统动力学. E-mail:yangyi66mail@163.com;3)谷正气,教授,主要研究方向:汽车空气动力学、整车性能分析与优化. E-mail:guzhengqi63@126.com
收稿日期:2020-01-11接受日期:2020-01-11网络出版日期:2020-09-18
| 基金资助: |
Received:2020-01-11Accepted:2020-01-11Online:2020-09-18
作者简介 About authors

摘要
本文将汽车绕流模块化为各典型局部流动,通过常用湍流模型对各典型局部流动进行数值模拟,结果验证了湍流模型对转捩的捕捉能力是准确模拟汽车绕流的关键. 在分析汽车绕流分离及转捩机理的基础上,优化了稳态和瞬态求解方法,改进了湍流模型对转捩的预测能力,进而提高了湍流模型在汽车流场模拟上的精度. 针对汽车绕流的稳态问题,将流线曲率因子及 响应阈值引入 LRN $k$-$\varepsilon $ (low Reynolds number $k$-$\varepsilon $) 模型,获得了一种能够更准确预 测转捩的改进低雷诺数湍流模型 (modified LRN $k$-$\varepsilon $),改善了原模型对湍流耗散率的过强依赖性及全应力发展预测不足等问题;针对汽车绕流瞬态求解,通过分析 RANS/LES 混合湍流模型的构造思想及特点,引入约束大涡模拟方法,结合本文提出的改进的 LRN $k$-$\varepsilon $ 湍流模型,提出了一种能准确捕捉转捩现象 的转捩 LRN CLES 模型. 分别将改进的模型用于某实车外流场和风振噪声仿真中,通过 Ansys Fluent 求解器计算,并将计算结果与常用湍流模型的仿真结果、HD-2 风洞试验结果和实车道路实验结果进行对比,表明改进后的湍流模型能够更准确模拟复杂实车的稳态和瞬态特性,为汽车气动特性的研究提供了可靠理论依据及有效数值解决方法.
关键词:
Abstract
The flow around automobiles was modularized into typical local flows in this paper. Through analyzing the characteristics of typical local flows, it is verified that the capture ability of turbulence model to transition is the key to accurately simulate the flow around automobiles. The paper optimized the solutions of steady-state and transient-state problems by analyzing the separation and transition mechanism of the flow, promoted the prediction ability of turbulence model for transition and improved the accuracy of turbulence model for automobile flow field simulation. For the steady-state solution of the flow around automobiles, by introducing the streamline curvature factor and the response threshold into the low Reynolds number (LRN) $k$-$\varepsilon $ model proposed by Jones and Lauder, a modified low Reynolds number turbulence model (modified LRN $k$-$\varepsilon $) which can predict transition more accurately was obtained. This model alleviated the problems of the original model's over-dependence on the turbulent dissipation rate and the insufficient prediction of the total stress development. For the transient-state solution, by analyzing the characteristics of the RNAS(Reynolds-averaged Navier-Stokes equations)/LES(large eddy simulation) mixed turbulence model, introducing the constrained large eddy simulation (CLES) method and the modified LRN $k$-$\varepsilon $ turbulence model proposed in this paper, a transition LRN CLES model that can accurately predict the transition was proposed. These improved models were applied to the simulation of the external flow field and buffeting noise of a real automobile model respectively. Computations were carried out using the ANSYS Fluent solver. The calculation results were compared with the simulation results of the commonly turbulence models, HD-2 wind tunnel test results and real vehicle road test results, it show that the improved turbulence models can more accurately simulate the steady-state and transient-state characteristics of the complex real automobiles, which provides a reliable theoretical basis and effective numerical solution method for the study of automotive aerodynamic.
Keywords:
PDF (9792KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
强光林, 杨易, 陈阵, 谷正气, 张勇. 基于车身绕流的低雷诺数湍流模型改进研究 1). 力学学报[J], 2020, 52(5): 1371-1382 DOI:10.6052/0459-1879-20-095
Qiang Guanglin, Yang Yi, Chen Zhen, Gu Zhengqi, Zhang Yong.
引言
汽车车身绕流是三维效应强、非定常、多尺度的复杂流动问题. 目前由于缺少完备的实验手段能够准确测量汽车周边流场,揭示其机理,同时尚无足够的计算资源可对车身绕流进行直接数值求解,因此至今人们还没能全面、深入地掌握车身绕流规律[1],并发展与之相适应的湍流模型. 研究表明,不合理的湍流模型是数值求解误差的最主要来源,无法准确预测车身绕流转捩是常用湍流模型数值求解误差的主要原因[2].本文通过梳理汽车绕流的流动机理及物理本质,分析汽车周边流动转捩的类型,将汽车各个复杂局部流动等效为近似简易模型. 在此基础上,以 LRN $k$-$\varepsilon $ 模型[3]为原型,通过引入流线曲率因子及响应阈值改进了该模型对湍流耗散率的过强依赖性及全应力发展预测不足等问题,提升该模型对转捩的捕捉能力,最终获得一种改进的低雷诺数湍流模型. 同时,引入约束大涡模拟思想,结合改进的低雷诺数湍流模型,构造适用于汽车绕流瞬态计算的转捩 LRN CLES 模型.
1 汽车绕流局部近似模型
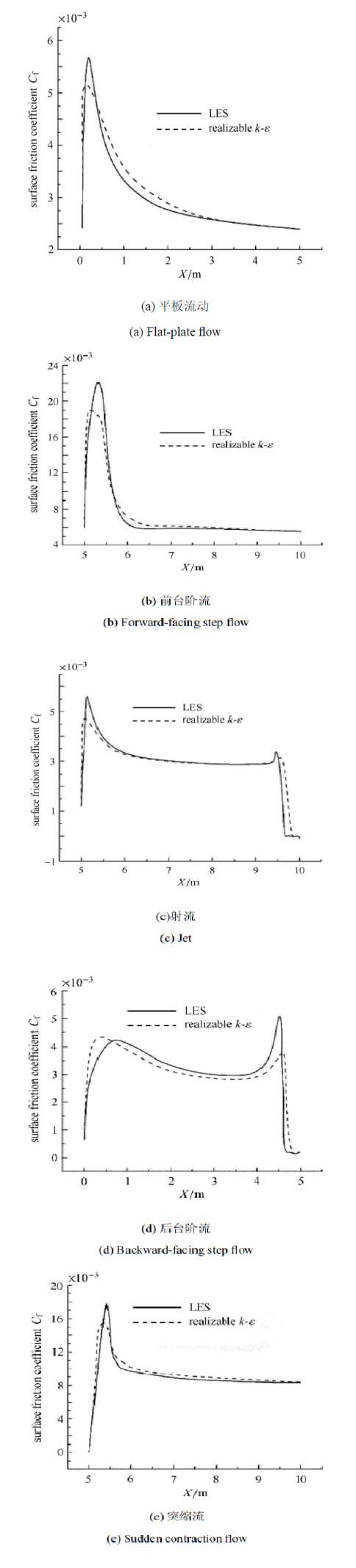
气流流经汽车车身,在汽车前端分离,形成主分离涡,主分离涡卷起一个包裹车头的椭球形漩涡,在顶面及侧面发生再附着现象. 由于地面效应,汽车底部气流形成了特有的复杂边界条件,流动特性沿地面垂直方向变化剧烈. 解决汽车外流场这种三维效应强、非定常、会流分离区多和涡结构复杂的流动问题,需深入剖析其局部流动[4]. 将汽车绕流模块化为典型局部流动,一方面有助于揭示汽车周边流动机理;另一方面使湍流模型的改进更具针对性.本文将汽车绕流大致分为如下几类:汽车前缘底部类似于突缩流;后缘底部类似于半限制射流;车身几何外形突变的位置,如后视镜与 A 柱间隙等类似于突缩、突扩流;前风挡与发动机舱拐角处类似于前台阶流动;车顶后缘几何断面突然扩张处,类似于后台阶流动;车顶部及发动机舱盖板处类似于平板流动. 根据上述分类,分别建立平板流、前台阶流、射流、后台阶流及突缩流模型,构建合适边界条件,将车身绕流等效为 5 类局部近似模型.
采用大涡模拟方法[5]对平板流、前台阶流、射流、后台阶流及突缩流的绕流机理进行数值研究, 如图 1,常用可实现的 $k$-$\varepsilon $ 湍流模型[6]计算结果被引入作为对比. 对比分析发现:由于层流湍流转捩导致表面摩擦系数发生突变,LES 和可实现的 $k$-$\varepsilon $ 湍流模型在突变处有显著不同,因此可推测湍流模型对转捩的预测不足是造成计算偏差的主要原因.
图 1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 1近似简易模型计算结果
Fig. 1Computational results for approximate simple models
除可实现的 $k$-$\varepsilon $ 模型外,引入类车身平板流及类车尾后台阶流评估汽车绕流数值求解中常用湍流模型对转捩的模拟能力,标准 $k$-$\varepsilon $ 模型[7]、RNG $k$-$\varepsilon $ 模型[8]、$k$-$\omega $ SST 模型[9]、RSM 雷诺应力模型[10]及 LRN $k$-$\varepsilon $ 模型[11]计算结果被引入作为对比,如图 2 所示. $C_{\rm f}$ 的走势图更加验证了湍流模型对转捩预测的不足是造成仿真偏差的主要原因. 标准 $k$-$\varepsilon $ 模型及 RNG $k$-$\varepsilon $ 模型对层流湍流转捩的拟合偏差较大,这是由于以上两种模型引入了半经验式的壁面函数[12]. 虽然 $k-w$ SST 模型避免了壁面函数的经验式求解,但对边界层转捩依然无法准确预测. RSM 雷诺应力模型则耗费较大计算资源,且较难收敛. 常用湍流模型中,对 $C_{\rm f}$ 预测最为准确的是 LRN $k$-$\varepsilon $ 模型,其低雷诺数边界层模拟机制与转捩较为相似,但对转捩的预测仍然存在一定偏差,特别是类车尾后台阶流动.
图 2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 2常用湍流模型计算结果对比
Fig. 2Comparison of the computational results of commonly used turbulence models
综上所述,对于汽车绕流各局部流动,转捩是决定流场发展的关键因素. 因此,针对汽车绕流的数值模拟,提高湍流模型适应 性的关键为增强其对转捩的预测能力.
2 构建改进的 LRN $k$-$\varepsilon $ 稳态湍流模型
由于低雷诺数湍流模型将 N-S 方程解析至壁面[13], 避免了经验式壁面函数的引入, 有助于揭示近壁面区流动机理,并 对转捩有巨大预测潜力,本文引入 低雷诺数 $k$-$\varepsilon $ 湍流模型[11],并对其进行转捩修正. 全应力限制方法[14]使 $k$-$\omega $ 模型获得了良好模拟转捩的能力,将此方法应用于 LRN $k$-$\varepsilon $ 湍流模型. 同时,引入流线曲率因子提高模型对分离流转捩的模拟能力,构建改进的 LRN $k$-$\varepsilon $ 湍流模型.2.1 基于全应力限制方法的湍流耗散率推导
Jones 和 Launder[11]提出的基于时均 N-S 方程的低雷诺数湍流模型如下式所示其中
式中,$\mu $ 为分子黏性系数, $\rho $ 为流体密度, $\mu_{t}$ 是湍流黏度,常数 $\eta _{0}=4.377$, $\beta =0.012$,$C_{\mu } =0.09$,$f_{1} =1$,$c_{\varepsilon 2} =1.92$,时均应变率 $S_{ij}$ 通过 $c_{\varepsilon 1}$ 引入以处理高应变率及弯曲流. $Re_{\rm T}$ 是湍流雷诺数.
扩散系数中的分子扩散系数及湍流扩散系数反映了分子黏性的影响;附加项 $2\mu (\partial k^{1/2}/\partial x_i)^2$ 被引入以反映 黏性底层中湍动能耗散的各向异性;附加项 $2(\mu \mu_t/\rho )(\partial^2 u/\partial x^2_i)^2$ 被引入以使湍动能$k$的计算结果与某些实验测定值更相符.
由于常用湍流模型对流动分离预测的不足表现为:过晚模拟出分离及过早模拟出再附着,相关实验及 DNS[15]结果也证实了这种不足[14]. 针对以上问题,引入全应力限制方法,消除湍流模型对湍流耗散率的过强依赖性,避免了由原始湍流模型对湍动能耗散率的过低估计带来的负面影响,具体改进过程如下.
由湍动能$k$的表达式
可知
其中,$\overline{u'_iu'_j}$ 表示雷诺应力,$\overline{u'^2}$,$\overline{v'^2}$,$\overline{w'^2}$ 分别代表速度脉动量在坐标系 3 个方向上的分量.
综合考虑全应力及雷诺应力的影响,可知
由
可得
该式可限制额外湍流应力的生成.
由 Boussinesq 假设可知
进一步推导可得
综上所述,湍动能耗散率应被约束如下
$\varepsilon_{0}$ 由原始湍动能耗散率输运方程得出,$k$ 由原始湍动能耗散方程得出,对于大多数流动, $\phi $ 取 2.5 可保证湍流模型对转捩的良好预测能力. 这项改进未引入额外输运方程,可由原始湍 流模型直接计算获得,对湍流模型在湍流充分发展区的计算结果影响较小.
2.2 考虑流线弯曲效应的湍流黏度构造
全应力限制方法可使 LRN $k$-$\varepsilon$ 模型获得良好预测转捩的能力,然而对于分离流转捩,还需发展更为有效的方法. 相关实验及DNS计算结果表明[14]:在流动分离区域,即使仅存在极小分离泡[16],扰动也会被迅速放大,湍动能则会迅速增长. 随着湍动能的较快增长,即使当地雷诺数较低,流动也会迅速发生转捩. 因此,要提高湍流模型对分离流及分离流转捩的模拟能力,须构造对流动分离较为敏感的感应量,流动分离通常伴随着高弯曲率,因此,弯曲率被引入作为感应量.流线${\pmb s}$的弯曲率$C_{s}$为
式中,${\pmb q}$ 为速度矢量,${\pmb q} = (u, v, w)$;$q$ 为速度标量 $q=\sqrt{u^2+v^2+w^2}$,矢量 ${\pmb n}_{q}$ 被定义为 ${\pmb n}_{q}=(u/q$, $v/q$, $w/q)$;$C_{s}$ 代表三维流线曲率的标量值,也是涡半径的倒数值,可用于表征涡的长度尺度. $C_{s}$ 在 3 个方向上的弯曲应变率分量分别为
构造一个关联 $C_{s}$ 的无量纲量 $S_{l}$,将 $C_{s}$ 引入湍流黏度,$S_{l}$ 可表示为
$S_{l}$ 的物理意义是湍流长度 (时间) 尺度与漩涡长度 (时间) 尺度的比值,也可作为湍流与漩涡之间的生成项与湍流耗散项的比值.
通过参数 $\alpha $,湍流黏度被表征为关联 $S_{l}$ 的方程
经计算对比发现, $\chi $ 应与 $R_{l}$ 在同一数量级,取为 0.1 较合适,$C_{0}$ 取为 10 较为合适.
以上改进中,流线曲率被无量纲化为 $S_{l}$,$S_{l}$ 则被用于构造 $\alpha $. 流动雷诺数较低时,$Re_{\rm T}$ 较小,当层流边界层分离,$S_{l}$ 迅速增大, $\alpha $ 将促发转捩,使得模型具备模拟分离流转捩的能力. 一旦层流转捩为湍流,$Re_{T}$ 剧增,$S_{l}$ 的影响就微乎其微了. 流线曲率的引入结合全应力限制方法可得出能准确预测转捩的改进的 LRN $k$-$\varepsilon$ 湍流模型,这个模型不仅能准确预测分离流转捩[17],还可准确模拟自然转捩及旁路转捩[18].
3 构建转捩 LRN CLES 瞬态湍流模型
汽车绕流的瞬态数值求解对计算资源的消耗巨大,特别是近壁面附近[19]. 混合 RANS/LES 方法[20]则可针对不同的流动问题,引入与之相适应的 RANS 模式[21]. 考虑到近壁面处 LES 模式的巨大计算资源消耗,本节对 RANS/LES 混合模型中的 RANS 模式进行转捩修正. 考虑到发展较为成熟的 CLES 模型[22]能较好地模拟圆柱绕流转捩,将其引入以处理汽车绕流瞬态问题. 同时,汽车绕流为高应变率及大曲率流动,存在较多的流动分离,转捩现象更为复杂,将改进的 LRN $k$-$\varepsilon$ 模型引入以构造约束大涡模拟 RANS 区域的 C-SGS 模型[23],进一步提高对转捩的捕捉能力,最终可获得转捩 LRN CLES 模型.3.1 约束亚格子应力模型建立
由于汽车绕流属于低马赫数流动,引入不可压缩流的大涡模拟控制方程其中,顶标 $\sim $ 代表低通过滤,通常以 $\varDelta $ 为过滤尺度; $\rho $ 为流体的密度;$\tilde u_i $ 为滤波后大尺度涡的速度;$\tilde p$ 为滤波后的压力; $\upsilon$ 为运动黏性系数; $\tau_{ij}$ 为亚格子尺度应力,代表过滤后的小尺度涡对大尺度涡的影响,可表示为
基于大涡模拟求解的关键为亚格子模型[24],其中应用最为广泛的是由 Lilly 及 Liu 提出的 DSLM 模型[25],由于 DSLM 模型不能较好的处理近壁面流动,此处引入约束大涡模拟思想,对 RANS 区域 C-SGS 模型的推导如下.
根据 RANS 及 LES 控制方程在数学上的高度一致性,RANS 区域总雷诺应力 $R_{ij}$、总亚格子应力的时均值 $\langle \tau_{ij} \rangle$ 及滤波后的雷诺应力 $R_{ij}^{\rm LES}$ 应存在以下关系
符号 $\langle \rangle $ 代表相应物理参量的时均值,$R_{ij}$ 可由RANS 模化为 $R_{ij}^{\ast}$,$R_{ij}^{\rm LES}$ 则通过直接求解 N-S 方程得出
由此可得
总亚格子应力可分解为时均值 $\langle \tau_{ij} \rangle $ 及脉动值 $(\tau_{ij})'$
$(\tau_{ij})'$ 可由 Lilly 及 Liu 提出的 DSLM 模型模化为 $(\tau^*_{ij})'$
$C_{s}'$ 由 DSLM 模型确定,由此可得 RANS 区域;C-SGS 应力为
C-SGS 模型仅用于求解近壁面区流动或者总雷诺应力可由 RANS 模化的流动区域,LES 模型则对其余流动区域直接求解. C-SGS 模型的准确性很大程度上取决于 $R^*_{ij}$,$R^*_{ij}$ 的准确性又依赖于 RANS 模型,针对汽车绕流问题,RANS 模型的准确性则取决于其对转捩的预测能力.
3.2 基于改进的 LRN $k$-$\varepsilon $ 模型的 CLES 建立
针对汽车绕流问题,C-SGS 模型主要作用于近壁面区,该区域内 $R_{ij}^{\rm LES}$ 可由 DSLM 模型直接计算,$R_{ij}$ 则由 第二节提出的能准确预测转捩的改进的 LRN $k$-$\varepsilon $ 模型进行计算,计算过程如下式中,$\mu_{t}$ 为湍流黏性系数;常数 $C_{\mu }=0.09$,$\varPhi =2.5$;$S_{ij}$ 为时均应变率; $\varepsilon_{0}$ 由原始湍动能耗散率输运方程得出,$k$ 由原始湍动能输运方程得出
其中 $C_{0} =10$,$C_{s}$ 代表三维流线曲率的标量值,也是涡半径的倒数值,可用于表征涡的长度尺度,$C_{s}$ 由无量纲量数 $S_{l}$ 引入湍流黏度.
4 改进模型验证与分析
4.1 风洞实验设置
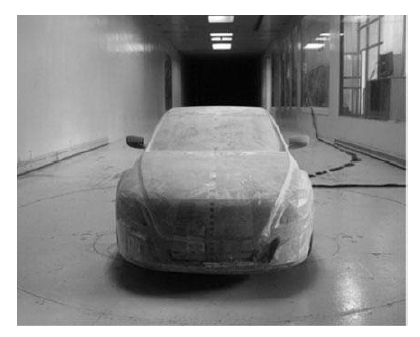
实验采用 1/3 缩比的汽车模型如图 3 所示,实验遵循相似准则. 风洞试验段尺寸为 2.5 m$\times $3 m$\times $17 m,可进行最高 1:3 的缩比汽车模型实验,湖南大学 HD-2 风洞[26]设计最大风速为 58 m/s,可满足雷诺数相似原则,进入"自模拟"状态.图 3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 3试验模型
Fig. 3Test model
4.2 改进的 LRN $k$-$\varepsilon $ 稳态湍流模型验证分析
本节将具备主流三厢轿车造型的某实车模型及其 HD-2 风洞实验数据引入以验证改进的 LRN $k$-$\varepsilon $ 模型及标准化数值求解体系.4.2.1 网格类型选择
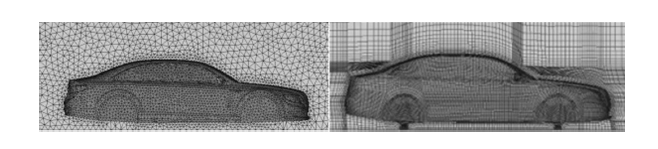
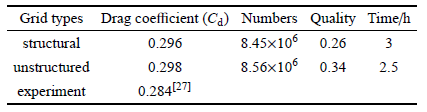
引入课题组前期某最简实车模型风洞实验数据[27],基于改进的 LRN $k$-$\varepsilon $ 模型,分别利用非结构网格及结构网格进行仿真分析,如图 4 所示. 由表1结果可知,即在不考虑模型网格划分难易的情况下,非结构也能较快收敛,且得到较为准确的计算结果. 因此,后续实车仿真模型采用非结构网格划分.
图 4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 4最简实车模型的非结构 (左) 与结构网格 (右)
Fig. 4Unstructured (left) and structural grid (right) of the simplest automobile model
Table 1
表1
表1结构与非结构网格计算结果
Table 1
 |
新窗口打开|下载CSV
4.2.2 模型简化及仿真参数设置
本实验采用的实车模型较为复杂,省略前格栅、轮毂、门把手、灯组、尾气管、B柱及车底细节,保留其余特征. 简化后的计算模型尺寸如图 5 所示,长 1588 mm、宽 643 mm、高 505 mm,最小离地间隙 50 mm.
图 5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 5模型试验尺寸和仿真计算域及边界条件
Fig. 5Model size, simulation computational domain and boundary conditions
综合计算效率及阻塞效率,选取计算域高为 5 倍模型高度,宽为 6 倍的模型宽度,长为 12 倍模型长度 (车前端距入口 3 倍车长,后端距出口 8 倍边界长度)[28]. 入口边界设置为速度入口,来流速度设置为 30 m/s,湍流度为 0.028 0,出口边界设置为压力出口,相对压力为零. 计算域顶部及两侧壁面设置为对称边界,计算域底部设置为移动壁面,汽车模型壁面设置为固壁无滑移壁面,选取改进的 LRN $k$-$\varepsilon $ 和可实现的 $k$-$\varepsilon $ 模型进行仿真计算. 具体的仿真计算域及边界条件设置如图 5 所示. 控制方程离散格式设置为二阶迎风格式,压力与速度耦合设置为 SIMPLE 隐式求解法.
4.2.3 网格无关性验证
仿真采用非结构网格划分,分别设置 3 种网格划分策略,验证网格无关性. 流动急剧变化部位被加密,边界层取 10 层,增长率为 1.1,经数次调整第一层网格高度,大部分模型表面 y+ 值均分布于合理范围内,此时第一层网格高度为 0.012 mm. 计算在 8 个 8 核 CPU、64GB 内存的 DELL Power 服务器上进行计算.
综合考虑表 2 中计算结果的误差和收敛时间,选择第 2 种网格划分策略,网格划分情况如图 6 所示.
Table 2
表2
表2不同网格阻力系数和计算时间
Table 2
 |
新窗口打开|下载CSV
图 6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 6该实车模型计算域网格
Fig. 6Model computing grids
4.2.4 计算结果分析
收敛耗时 25 h. 保证其他求解条件不变,基于可实现的 $k$-$\varepsilon $ 模型的计算结果及 HD-2 风洞试验数据被引入作为对比. 计算及实验所得该实车模型的气动阻力系数 $C_{\rm d}$ 值及气动升力系数 $C_{\rm l}$ 值如表 3 及图 7 所示.
Table 3
表3
表3气动阻力系数及气动升力系数 ($\beta =0^\circ$)
Table 3
 |
新窗口打开|下载CSV
图 7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 7实车模型气动阻力与升力系数
Fig. 7Aerodynamic drag and lift coefficient of the model
由图表可知,本文提出的改进的 LRN $k$-$\varepsilon $ 模型可较好的计算该模型的气动阻力及气动升力,与风洞试验结果误差较小,特别是对汽车气动升力的计算,较常用的可实现的 $k$-$\varepsilon $ 模型有较大提升.
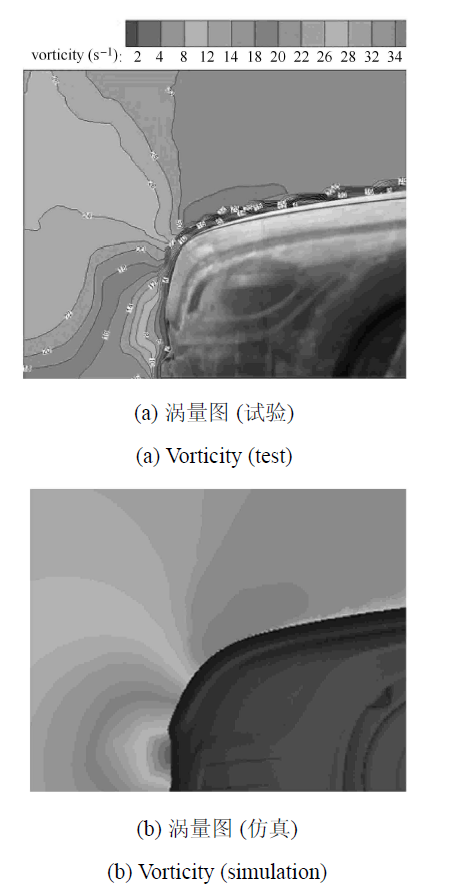
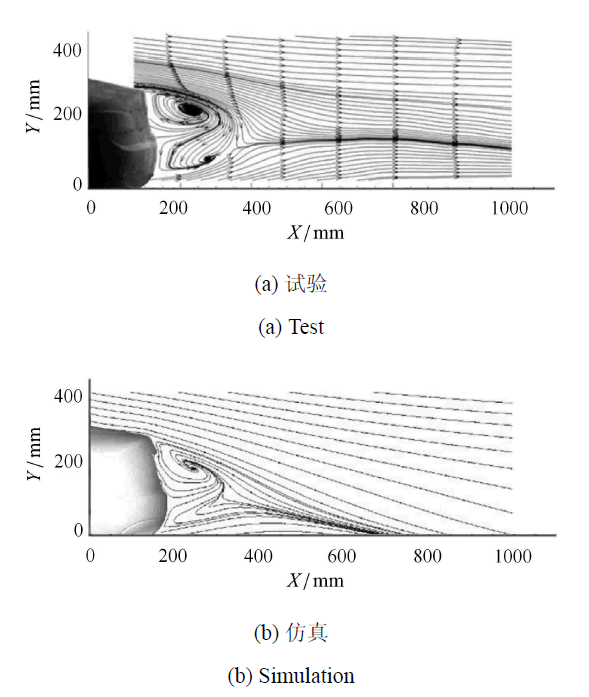
图 8 $\sim$ 图 11 分别表示改进的 LRN$k$-$\varepsilon$ 模型计算所得表面静压分布、车头及车尾处流场分布,该结果与风洞试验较为吻合. 由该实车模型表面压力分布图 8 及车头流线图 9 可知,气流最先到达汽车头部,受到阻滞作用形成驻点,产生较大正压区,并贴附汽车表面形成边界层. 之后,气流在行驶至发动机舱盖板的过程中,受正压梯度影响,与前台阶流较为相似. 气流流至汽车尾部的气流边界层则类似于后台阶流. 本文汽车尾部过渡曲率较小,逆压梯度作用较小,边界层行驶至汽车尾端才脱离物面,并形成自由剪切流,在尾部形成漩涡,之后汇入尾流,实验与仿真在汽车尾部均出现两个漩涡,实验对比结果较好. 图 10 和图 11 中可以看出实验与仿真之间仍然有一些偏差,一方面是由于实验条件的限制,实验与仿真保证了相似准则,但无法确保完全一致,并且实验会受到不可控的一些外部因素的干扰;另一方面是由于本文提出的改进的模型仍然基于一部分经验公式,因此还需经过多个算例进行验证,发现其不足,并进行修正,提高其普适性.
图 8
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 8表面压力分布
Fig. 8Surface pressure distribution (continued)
图 9
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 9车头流线图
Fig. 9Streamline diagram at the head
图 10
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 10车头涡量图
Fig. 10Vorticity diagram at the head
图 11
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 11车尾流线图
Fig. 11Streamline diagram at the tail
4.3 转捩 LRN CLES 瞬态湍流模型验证分析
汽车风振噪声产生于气流的脉动压力,具有较强的瞬态特性,是典型的瞬态汽车绕流问题. 汽车周边脉动压力的数值求解对湍流模型要求较高,本节引入某款轿车进行的实车道路试验验证转捩 LRN CLES 模型对汽车瞬态绕流的求解能力.4.3.1 模型简化及仿真参数设置
简化后的计算模型如图 12 所示,具体尺寸如图 13,长 4682 mm,宽 1879 mm,高 1624 mm,最小离地间隙 150 mm.
图 12
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 12汽车风振噪声数值计算模型
Fig. 12Numerical calculation for buffeting noise of the automobile model
图 13
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 13模型尺寸和计算域及边界条件
Fig. 13Model size, calculation domain and boundary conditions
对车辆进行仿真的外部计算域为长方体,参数设置和 4.2.2 节一致. 入口边界设置为速度入口,来流速度设置为 30 m/s,湍流度为 0.024 3,出口边界设置为压力出口,相对压力为零. 计算域顶部及两侧壁面设置为对称边界,计算域底部 (即地面) 设置为移动壁面,汽车模型壁面设置为固壁无滑移壁面,与试验相对应,将左后侧窗设置为 Int Wall,模拟该侧窗的开启环境. 选取转捩 LRN CLES 模型进行仿真计算. 具体的仿真计算域及边界条件设置如图 13 所示.
对于瞬态求解,控制方程离散格式设置为边界中心差分格式,压力与速度耦合设置为 PISO 隐式求解法.
4.3.2 网格划分
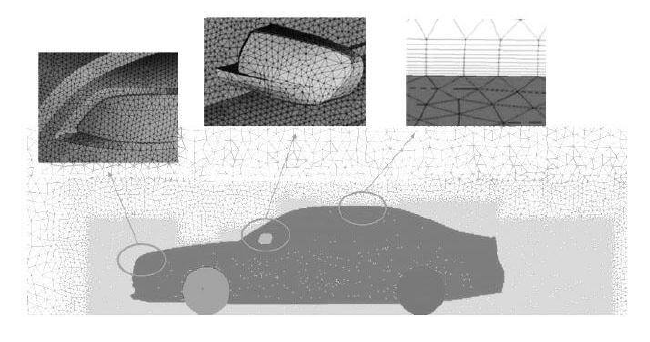
采用非结构网格划分后,该实车模型模拟网格总数约为 2800 万,网格设置与 4.2.3 节情况相同,网格划分情况如图 14 所示.
图 14
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 14该实车模型气动噪声计算域网格
Fig. 14Aerodynamic noise computing grids
4.3.3 计算结果分析
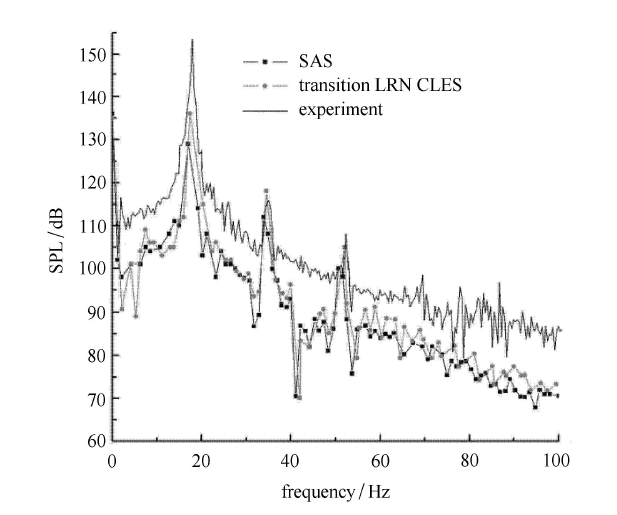
此瞬态计算时间步长取为 1.0$\times $10$^{ - 4}$s,每个时间步内迭代计算 20 次. 由道路实验结果可知,声压级 (SPL) 第一个阶次峰值出现的频率为 17.6 Hz,因此周期约为 0.056 8 s,为实现充分瞬态效应,取流动总时长为 2.1 s. 计算总耗时 32 d 3 h.
本课题组前期研究中的SAS计算结果[29]被引入作为对比. 计算结果如图 15 所示,计算所得前 3 个阶次声压级峰值及其出现频率如表 4 所示. 由图表可知,转捩 LRN CLES 模型及 SAS 模型[30]计算所得声压级峰值均低于实验值,这是由于数值计算仅考虑了计算域流场环境,而道路实验受诸多周边环境影响,背景噪声较大. 但转捩 LRN CLES 模型与实验结果更为接近. 验证了转捩 LRN CLES 模型良好的瞬态性能.
图 15
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图 15仿真计算和实验声压级
Fig. 15SPL of the simulation and test
Table 4
表4
表4声压级峰值频率
Table 4
 |
新窗口打开|下载CSV
5 结论
本文首先通过典型局部流动对汽车绕流机理进行深入分析,研究发现转捩是决定流场发展的关键因素. 针对汽车绕流稳态及瞬态求解,分别提出了一种能够准确预测转捩现象的改进的LRN $k$-$\varepsilon $ 及转捩 LRN CLES 模型,并将其应用于实车模型绕流的数值研究以验证其准确性.通过对某实车气动力及风振噪声的数值研究,并与 HD-2 风洞试验及实车道路试验进行了对比分析,结果表明:相同网格条件下,相对于常用的湍流模型,基于本文提出的改进的 LRN $k$-$\varepsilon $ 及转捩 LRN CLES 湍流模型的标准化高精度数值求解体系能够更准确模拟复杂实车的绕流特性,特别是对气动升力的数值计算,精度高于常用湍流模型.
参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
[本文引用: 1]
[本文引用: 1]
URL [本文引用: 1]

本文通过求解雷诺平均NS方程,采用基于%-u模型和添加控层流动能方程的三方程湍流模型计算转捩流动。相对于基于实验的转捩关系式模型,本模型对叶轮机械复杂的流动环境提供了更加真实的物理意义。ERCOFTACT3系列实验和低压涡轮叶栅的算例表明该模型能够自动捕捉流动的转捩过程,但还需要进一步修正以能更加准确考虑各种因素对转捩的影响。
URL [本文引用: 1]
本文通过求解雷诺平均NS方程,采用基于%-u模型和添加控层流动能方程的三方程湍流模型计算转捩流动。相对于基于实验的转捩关系式模型,本模型对叶轮机械复杂的流动环境提供了更加真实的物理意义。ERCOFTACT3系列实验和低压涡轮叶栅的算例表明该模型能够自动捕捉流动的转捩过程,但还需要进一步修正以能更加准确考虑各种因素对转捩的影响。
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 3]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOIURL [本文引用: 3]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOIURL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}