0 引言
【研究意义】玉米是中国最重要的粮食作物之一,增产潜力巨大。DONALD[1]于1986年提出了“理想株型”概念,把植物育种目标细化为一些株型特点,突破了仅选择产量性状的传统育种方法[2]。玉米理想株型是由影响作物光合作用、生长发育和籽粒产量的性状所组成,其能最大限度提高光能利用率,增加生物学产量和提高经济系数;此外,玉米株型的分析与优化研究也是作物表型组学[3,4]、植物功能-结构模型[5,6]及数字植物[7,8]等领域研究的重要内容之一。因此,借助现代三维信息获取手段,以数字化方式精确定量分析玉米株型对玉米株型在栽培和育种方面的应用具有重要作用。【前人研究进展】在玉米株型数据获取方面,传统玉米株型分析方法以人工测量为主,利用直尺、量角器等测量玉米的株高、叶片着生高度、叶倾角和方位角等参数,在此基础上计算叶面积指数并进行株型结构分析等[9,10]。由于各研究团队对玉米株型参数测量标准存在差异(如叶倾角的测量),致使所测量参数间存在一定差异,同时人工测量也难以保持连续性的高精度。针对上述问题,研究者提出了制定玉米器官三维数据获取规范,以此来约束玉米三维数据获取的精度。马韫韬等[11]提出了通过三维数字化仪获取玉米叶片主脉三维坐标实现植株三维数字化数据获取的方法。温维亮等[12]针对玉米不同器官形态特征,制定了三维数字化数据、三维扫描数据、表观纹理数据以及辅助信息获取规范,在此基础上构建了玉米器官三维模板资源库,标准的植物三维数据获取方法是精确提取植株株型参数的重要基础。在玉米株型参数提取方法方面,利用图像获取作物株型信息具有快速、高通量、无损测量等特征。宗泽等[13]提出了一种基于骨架提取改进算法实现大田环境下苗期玉米特征提取的方法;SHYU等[14]从表型分析角度提出用图像测量玉米植株的表型参数方法;CHAIVIVATRAKUL等[15]利用TOF(time of flight)相机获取玉米生长初期点云数据,通过茎与叶片点云分割,实现了玉米茎高、叶长、叶倾角和叶面积等参数提取和三维重建,但由于利用图像还原三维信息精度有限,基于图像的提取方法在株型参数提取方面的精度仍有待提高。PAULUS等[16]利用三维扫描仪获取了大麦三维点云并在此基础上提取了株高、茎高和叶面积等参数;LOU等[17]利用三维点云估算了植物枝条倾角;PAULUS等[18,19]通过获取窄叶植物器官三维点云提取了植株株型参数;苏伟等[20]基于地基激光雷达提取了玉米叶倾角和叶面积参数,由于玉米叶片相对宽大,点云遮挡较多,基于点云提取玉米叶脉骨架的方法尚不成熟[21,22],因此,该方法尚无法解决玉米高精度株型参数提取问题。由于利用图像和三维点云提取玉米株型参数主要是以提取玉米叶片骨架[23,24,25]结构为核心内容,因此,研究者直接利用三维数字化仪获取玉米植株骨架结构并开展了玉米株型结构分析[11, 26],但上述研究缺乏统一数据获取标准和参数计算准则,同时利用叶方位角计算玉米植株方位平面的方法仍不完善。【本研究切入点】前人分别在玉米株型参数测量和提取方面做了较多研究工作,但仍存在着玉米株型参数手工测量标准不一致、利用图像和三维点云方法提取株型参数精度低、玉米植株方位平面缺乏定量化描述等问题。【拟解决的关键问题】本研究利用三维数字化仪获取玉米植株三维骨架结构数据,在此基础上提取玉米主要株型参数,以精确反映玉米品种和栽培处理等因素产生的形态差异,为玉米株型分析提供信息化技术手段。1 材料与方法
1.1 试验设计
植物拓扑结构的三维数字化技术[27],即采用具有空间坐标定位功能的三维数字化仪,利用其探笔按照一定规则,在同一坐标系下获取植株主要结构三维空间点序列,以数字化方式真实重现目标植株的空间拓扑结构。由于玉米植株高大,需采用大范围数字化系统开展数据采集[28]。本研究采用FastScan三维数字化仪结合Polhemus Long Ranger远距离发射器组成三维数字化系统,系统发射器范围为1.8 m(±0.9 m),并可拓展40%,可以满足玉米植株三维数字化要求。由于三维数字化系统是基于电磁定位原理,故要求试验区域内无钢结构物体,否则会影响三维数字化数据精度。选取2016年播种于北京市农林科学院试验田(N39°56′,E116°16′)玉米品种京科665、京科968、MC812、农大108、先玉335、郑单958,对这6个玉米品种的吐丝期植株对应的形态参数进行人工测量,然后将各植株整株移至室内进行三维数字化。
1.2 数据获取
在玉米三维数字化数据获取规范约束下,开展玉米植株三维数字化数据获取。以器官为基本单位,且各器官三维数字化数据采集保证在同一坐标系下完成。所需获取器官包括茎、叶、雄穗和雌穗,此外还包括植株定向指北线。为了植株三维数字化数据的一致性,玉米植株三维数字化数据获取需在统一标准下完成。在利用探笔进行数据点采集过程中,要求探笔尖不可用力过大,避免因器官位移导致测量误差。记Po为植株生长点坐标,各器官记为一个点集。(1)茎:记为$\lbrace{S_i}\rbrace$,其中1≤i≤NS,$N_s$为茎点集的点数。茎点集获取时,由植株生长点起,至最后一个叶与茎的连接点结束,因此$S_1=P_0$;如果茎较长,要求在各节连接点、两个节连接点中间各获取一个点。
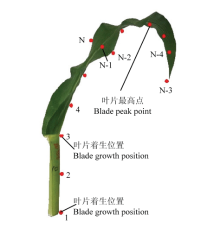
(2)叶(含叶片与叶鞘):记为{Lik},其中1≤i≤LLk,k为叶序,LLk为叶序为k的叶上点的个数。由叶着生处(该叶的叶鞘生长点,图1),沿叶鞘和叶脉曲线获取三维数字化点数据,至叶尖结束,要求L3k为叶片着生位置(图1)。若玉米生长前期叶鞘不可见,则在叶与茎分离点起重复获取该点坐标3次(保证L3k为叶片着生位置);若叶为抛物线叶尖下垂形,则该叶的数字化点集须包含最高点;单叶各数字化点间距尽量均匀;此外,为了提取叶宽信息,于各叶的叶宽最大处垂直于叶脉方向点取3个点,作为该叶点集最后3个点。
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图1玉米叶三维数字化数据获取示意图
-->Fig. 13D digitizing data acquisition diagram of maize leaf
-->
(3)雄穗:记为$\lbrace{M_i}\rbrace$,其中1≤i≤NM,$N_M$为雄穗点集的点数。首先获取雄穗主轴,由植株最后一个叶与茎分离处起为M1,沿主穗至主穗顶,M3为主穗顶;然后按各分支的生长位置点取各分枝雄穗三维数字化数据,每个分枝也包含3个点,分别为生长点,中点和分枝雄穗尖点,即$N_M$为3的整数倍。
(4)雌穗:记为{Fi},其中1≤i≤NF,$N_F$为雌穗点集的点数。由雌穗着生点起,沿雌穗外轮廓获取三维数字化点,至雌穗尖结束。
每株玉米完成数据获取后,在更改定标系统位置前,利用可视化插件对植株数据可视化,检查数据准确性,如某器官数据存在偏差需立刻重新获取。该可视化插件利用Qt开发,通过设定当前获取植株数据目录,按照获取规则每完成一个器官的数据获取后,点击刷新按钮可获得当前已获取数据的可视化效果,并以可视化的方式检测新获取器官单元的准确性,若数据点数量有误会弹出提示窗口。图2为不同时期玉米植株三维数字化数据可视化结果。
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图2玉米植株三维数字化数据可视化
-->Fig. 23D digitizing data visualization of maize plants
-->
1.3 数据分析方法
采用绝对误差Ei、平均绝对百分误差MAPE(mean absolute percent error)、均方根误差RMSE(root mean square error)和标准化均方根误差NRMSE(normalized root mean square error)来评价各参数的计算精度:$E_i={\vert{{\chi_i}-{\chi_i}}\vert}$ (1)
$MAPE=100\%\frac{1}{n}\sum\limits_{i=1}^{n}\frac{E_i}{x_i}$ (2)
$RMSE=\sqrt{\frac{1}{n}\sum\limits_{i=1}^{n}(\widehat{x}_i-x_i)^2}$ (3)
$MAPE=100\%\frac{1}{\bar{x}}\sqrt{\frac{1}{n}\sum\limits_{i=1}^{n}(E_i)^2}$ (4)
式中,$\widehat{x}_i$为模拟值,$x_i$为真实值,n为样本数,$\bar{x} $为真实值的平均数,MAPE、RMSE和NRMSE反映了所提取各株型参数偏离真实值的程度。
2 结果
2.1 株型参数提取方法
2.1.1 植株三维数字化数据规则化 由于所获取各植株三维数字化数据的植株方向有可能是任意角度倾斜,甚至倒置,因此,首先需将各植株三维数字化数据规则化,即先将植株平移,保证植株生长点为原点,然后将植株茎生长方向旋转至与Z轴正方向(记为Vz)平行。记Vs为玉米植株茎生长方向:$V_s=\frac{1}{N_s}\sum\limits_{i=1}^{N_s}S_i-S_1$ (5)
将Vs正则化,计算Vs与Vz夹角,记为$\phi$,则有cos$\phi$=VS×VZ(向量内积),记$V_r=V_s\times{V_z}$(向量外积)为旋转轴,将植株所有三维数字化数据点绕Vr旋转$\phi$即实现植株生长于原点且竖直向上的规则化操作。
2.1.2 长度参数提取
2.1.2.1 株高H、叶片着生高度hk、叶片最高点高度hku的提取。叶片着生高度为叶片着生位置的高度值,叶片最高点高度为叶片空间位置最高处的高度值(图1)。由于叶器官数字化标准中确保了L3k为叶片着生位置,故hk=L3k.z,其中L3k.z表示三维空间点L3k的z坐标值,文中后续部分的L3k.x和L3k.y同样表示三维空间点L3k的x和y坐标值;由叶片最高点高度的定义知
$H=\max \left( \underset{\text{ }1\le k\le N}{\mathop{\max }}\,\left( h_{k}^{u}.z \right)\text{ },{{M}_{3}}.Z \right)$ (6)
式中,M3.z表示雄穗第3个点的z坐标,如果当前玉米植株生育时期为抽雄前,则

2.1.2.2 叶长lk、叶宽wk、叶展sk的提取。叶长的计算是由茎叶连接点至叶尖点的长度和。由于叶脉经各点离散后,相邻点间曲率变化不大,但通过相邻点间的折线段距离累加求和使叶长减小,因此,通过对不同品种、不同叶位的叶进行三维数字化,并精确测量叶长得到提取叶长与实测叶长的经验比例系数$\eta$,得到最终叶长计算公式为

由于各叶最后3个点用来计算叶宽,与叶长计算的经验比例系数原理相同,叶宽的经验比例系数为$\mu$,故叶宽计算公式为

根据叶展定义,认为叶尖距离叶起始点的水平距离最远(叶折损情况不考虑),则叶展计算公式为

2.1.3 角度参数提取
2.1.3.1 叶倾角θk的提取。根据人工测量中对叶倾角的测量方式,定义L3k与L4k、L5k中点形成射线方向与其在XOY平面投影的夹角为叶倾角,其计算公式为
2.1.3.2 叶方位角$\alpha_k$的提取。由于叶脉上的三维数字化点决定了叶的方位朝向,但叶尖位置附近的力学稳定性较差,空间姿态易发生变化,故以叶的第4至第LLk-5个点方向的均值方向作为计算叶方位角的依据(即除用于计算叶宽的最后3个点外,叶尖部分最后两个点也不参与方位角计算),在坐标系中以Y轴正方向为正北方向,则叶方位角计算方法为:


式中,$\left( L_{i}^{k}-L_{3}^{k} \right)\text{ }.Norm\left( {} \right)$表示向量$(L_i^k-L_3^k)$正则化。
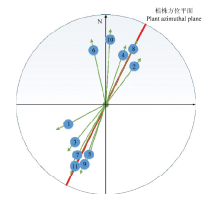
2.1.4 植株方位平面提取 玉米叶全部展开时,植株的相邻叶多相对生长。已有研究表明,玉米的单个叶分布在一个单一垂直平面附近[11, 26, 29],这个平面即为植株方位平面,其与正北方向夹角记为α(图3)。已有的利用叶方位角计算植株方位平面方法是因玉米植株叶主要呈对侧分布,将其中一侧叶方位向量取负[26],然后对所有叶的方向向量求平均,所得向量处于的平面P为植株方位平面(公式15),但该方法只是对植株方位平面的一个近似估计。
式中,j%2表示j除2的余数。
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图3玉米植株方位平面示意图
-->Fig. 3Diagram of maize plant azimuthal plane
-->
为给出玉米植株方位平面的定量描述,提出一种精确的玉米植株方位平面计算方法。由于玉米植株生长过程中最后几片叶多为解除状态,其叶方位角仍随植株生长不断变化,故植株方位平面计算不使用最后t个叶参与计算(本文取t=3),或认为当$\left| {{\alpha }_{k}}-{{\alpha }_{k-1}} \right|\le \pi /2$时,第k个叶及叶序大于k的叶不参与植株方位平面计算。方法思路是认为植株方位平面是距离各叶方位角αj角度差绝对值之和最小的方位平面所对应的角度,因此植株方位平面可表达如下:

为求解$\alpha$,设

式中,n表示参与植株方位平面计算的叶个数。
采用迭代方式求解使$M(\alpha)$达到最小的$\alpha$,在迭代过程中,要求确保$\mid\alpha_j-\alpha\mid\le\pi/2$,因此对于不同的$\alpha$,αj有可能需要取其反方向角度,且需对新方位角序列进行重新排序。由公式17可知,当n为偶数时,$\alpha$的系数(2k-n-2)有可能为0,其所求得的$\alpha$有可能是一个范围(例如当只有两个叶参与计算时,两个叶中间的任意角度均满足公式16),记为$\lbrack{\alpha_{min},\alpha_{max}}\rbrack$,实际上这个范围内的所有角度都可以作为植株方位平面角,即$\forall\alpha_1,\alpha_2\in\lbrack{\alpha_{min},\alpha_{max}}\rbrack$,$M(\alpha_1)=M(\alpha_2)$。此时为给出一个确切的植株方位平面角,取$\alpha=(\alpha_{min}+\alpha_{man})/2$。
根据$M(\alpha)$定义,其是描述玉米植株各叶方位角距离植株方位平面的角度差之和,记$dev=M(\alpha)/n$,dev值(偏离值,deviation)描述了植株叶偏离植株方位平面的平均值,可作为评价玉米植株叶方位角偏离植株方位平面程度的一个指标。dev越大,植株叶方位角偏离植株方位平面越多,当dev趋近于0时,所有叶趋近于在一个平面内分布。算法中如果n为偶数,且计算的$\alpha_{min}=0$且$\alpha_{man}=\pi$,则说明角度区间有可能是在$\lbrack{0,\alpha_{1}}\rbrack\cup\lbrack{\alpha_{2},\pi}\rbrack$,这时将所有输入方位角同时增加${\pi}/2$再计算方位平面,得到结果再减去${\pi}/2$即可。表1给出了4组不同植株叶方位角计算得到的植株方位平面的计算结果,并给出了利用均值法[11]计算得到的植株方位平面和对应偏离值。其中,B组各叶方位角比A组对应各叶方位角增加100.0°,可见方法具有旋转不变性,且因均值法所得到植株方位平面角落在了对应的$\lbrack{\alpha_{min},\alpha_{max}}\rbrack$区间内,因此均值法的偏离值与dev值相同;D组数据与图3对应,由于n为奇数,故不存在$\alpha$的取值范围;由C与D组数据可看出,均值法所计算植株方位平面对应的偏离值均大于对应数据的dev值,说明本文利用优化求解方法可给出更好的玉米植株方位平面定量化描述。
Table 1
表1
表1植株方位平面角计算结果
Table 1Calculation of plant azimuthal plane
| 编号 No. | 叶数 Leaf number | 叶方位角 Leaf azimuth angle (°) | 植株方位平面范围 Azimuthal plane range (°) | 植株方位平面 Azimuthal plane (°) | dev值 dev value (°) | 均值法方位平面 Azimuth plane of averaged method (°) | 均值法偏离值 Deviation of averaged method (°) |
|---|---|---|---|---|---|---|---|
| A | 10 | 180.0, 90.0, 210.0, 75.0, 240.0, 50.0, 260.0, 70.0, 280.0, 50.0 | [60.0, 70.0] | 65.00 | 22.50 | 60.50 | 22.50 |
| B | 10 | 280.0, 190.0, 310.0, 175.0, 340.0, 150.0, 0, 170.0, 20.0, 150.0 | [160.0, 170.0] | 165.00 | 22.50 | 160.50 | 22.50 |
| C | 12 | 205.0, 330.0, 150.0, 340.0, 210.0, 0, 200.0, 0, 225.0, 355.0, 100.0, 0 | [0, 0] | 0 | 23.75 | 176.25 | 24.38 |
| D | 11 | 242.9, 37.3, 219.5, 18.7, 198.4, 347.4, 209.5, 26.1, 200.2, 3.6, 207.0 | — | 26.12 | 13.44 | 24.60 | 13.58 |
新窗口打开
2.2 验证结果
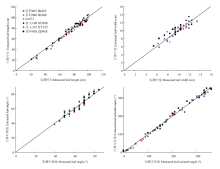
采用所获取的6个品种数据对利用三维数字化数据所提取的株型参数进行验证(图4)。由于方法为针对玉米的普适性方法,不存在品种、生育时期或叶位的差异,故所选取的6个品种植株可视为对每个株型参数的验证的6个重复。利用上述参数提取方法提取对应的叶长、叶宽、叶倾角和方位角,并利用植株方位平面计算方法计算各植株的植株方位平面。与实测数据进行对比,叶长、叶宽、叶倾角的对比结果如图5所示。其中,由于植株三维数字化将植株整体以破坏性取样至室内测量,各植株叶方位角与实测植株方位角有整体偏差。为对比模拟方位角和实测方位角,利用各植株模拟和实测的方位角(表2),分别计算植株的模拟方位平面角和实测方位平面角(表3),计算模拟方位平面角与实测方位平面角的角度差,再将各植株的模拟叶方位角统一加上这个角度差,然后再对比分析对应叶的方位角误差。6个品种叶方位角的RMSE均值为8.23°。 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图46个品种玉米植株三维数字化数据可视化
-->Fig. 43D digitizing data visualization of 6 different maize cultivars
-->
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图56个品种植株提取的叶长、叶宽、叶倾角和方位角参数与实测参数对比结果
-->Fig. 5Comparison results between extracted and measured leaf length, leaf width, leaf insertion inclination and leaf azimuth of 6 different cultivar maize plants
-->
Table 2
表2
表26个品种植株叶方位角提取与实测值
Table 2Extracted and measured azimuth angles of 6 different cultivar maize plants
| 叶ID Leaf ID | 京科665 JK665 | 京科968 JK968 | MC812 | 农大108 ND108 | 先玉335 XY335 | 郑单958 ZD958 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 模拟值 Simulated (°) | 实测值 Measured (°) | 模拟值 Simulated (°) | 实测值 Measured (°) | 模拟值 Simulated (°) | 实测值 Measured (°) | 模拟值 Simulated (°) | 实测值 Measured (°) | 模拟值 Simulated (°) | 实测值 Measured (°) | 模拟值 Simulated (°) | 实测值 Measured (°) | |
| 1 | 120.6 | 50.0 | 216.2 | 180.0 | 269.8 | 135.0 | 242.9 | 170.0 | 357.7 | 335.0 | 264.8 | 205.0 |
| 2 | 280.1 | 210.0 | 120.0 | 90.0 | 85.6 | 320.0 | 37.3 | 320.0 | 130.5 | 110.0 | 35.9 | 330.0 |
| 3 | 81.4 | 10.0 | 246.0 | 210.0 | 272.6 | 150.0 | 219.5 | 150.0 | 334.9 | 310.0 | 203.2 | 150.0 |
| 4 | 303.8 | 230.0 | 99.6 | 75.0 | 72.8 | 305.0 | 18.7 | 310.0 | 113.6 | 100.0 | 47.1 | 340.0 |
| 5 | 94.4 | 30.0 | 281.8 | 240.0 | 285.0 | 160.0 | 198.4 | 125.0 | 343.3 | 320.0 | 276.5 | 210.0 |
| 6 | 241.6 | 175.0 | 82.1 | 50.0 | 144.1 | 20.0 | 347.4 | 270.0 | 98.3 | 80.0 | 60.0 | 0.0 |
| 7 | 44.2 | 330.0 | 311.0 | 270.0 | 251.1 | 120.0 | 209.5 | 140.0 | 347.2 | 335.0 | 268.5 | 200.0 |
| 8 | 250.2 | 175.0 | 104.2 | 70.0 | 77.1 | 310.0 | 26.1 | 300.0 | 259.4 | 240.0 | 41.3 | 0.0 |
| 9 | 23.0 | 310.0 | 307.0 | 270.0 | 245.6 | 120.0 | 200.2 | 130.0 | 348.2 | 330.0 | 296.9 | 225.0 |
| 10 | 272.2 | 190.0 | 84.2 | 50.0 | 80.4 | 300.0 | 3.6 | 285.0 | 356.4 | 345.0 | 46.5 | 355.0 |
| 11 | 21.0 | 330.0 | 239.3 | 200.0 | 245.9 | 120.0 | 207.0 | 150.0 | 17.5 | 0.0 | 161.3 | 100.0 |
| 12 | 172.2 | 90.0 | 60.7 | 40.0 | 96.3 | 330.0 | 298.2 | 250.0 | 329.7 | 300.0 | 65.0 | 0.0 |
| 13 | — | — | — | — | — | — | 227.8 | 160.0 | — | — | 335.6 | 260.0 |
| 14 | — | — | — | — | — | — | 4.7 | 280.0 | — | — | 66.8 | 15.0 |
| 15 | — | — | — | — | — | — | — | — | — | — | 23.1 | 330.0 |
新窗口打开
Table 3
表3
表36个品种植株模拟与实测的方位平面、dev值与叶方位角RMSE
Table 3Extracted and measured plant azimuth plane, dev value and leaf azimuth RMSE of 6 different cultivar maize plants
| 株型参数 Morphological parameters | 京科665 JK665 | 京科968 JK968 | MC812 | 农大108 ND108 | 先玉335 XY335 | 郑单958 ZD958 |
|---|---|---|---|---|---|---|
| 模拟方位平面角 Simulated plant azimuthal plane (°) | 81.42 | 100.70 | 85.64 | 26.12 | 154.88 | 53.57 |
| 实测方位平面角 Measured plant azimuthal plane (°) | 10.00 | 65.00 | 135.00 | 130.00 | 130.00 | 0 |
| 模拟dev值 Simulated dev value (°) | 26.65 | 21.59 | 16.11 | 13.44 | 28.28 | 28.03 |
| 实测dev值 Measured dev value (°) | 27.78 | 22.50 | 17.22 | 16.36 | 27.78 | 23.75 |
| 叶方位角RMSE RMSE of leaf azimuth angle (°) | 7.92 | 6.21 | 5.51 | 10.67 | 7.58 | 11.49 |
新窗口打开
表4给出了6个品种植株叶长、叶宽和叶倾角的实测均值、均方根误差RMSE和平均绝对百分误差MAPE。6个品种的叶长、叶宽和叶倾角的MAPE均值分别为4.06%、7.21%和4.72%,RMSE均值分别为3.44 cm、0.80 cm和3.41°,NRMSE均值分别为4.46%、8.18%和5.30%。由对比结果可知,叶宽模拟误差相对较大,主要由于叶片在叶脉垂直平面上的曲线形态不一致所导致。叶倾角实测数据均为整数,且实测叶倾角的精度对人为试验要求很高,由于人工测量受所采用仪器限制,其测量精度无法达到较高精度,如所测量叶倾角数值均为5的倍数;利用三维数字化提取的方法可在保证提取规则一致的前提下,同时达到较高的精度。表3给出了6个品种植株的模拟方位平面角和实测方位平面角,并利用公式计算了各植株的dev值。由dev值可知,先玉335、郑单958和京科665的植株较京科968、MC812和农大108植株的各叶片偏离植株方位平面较多,dev值大的植株占用了较多的立体空间,对于群体中光截获更为有利。
Table 4
表4
表46个品种植株提取叶长、叶宽和叶倾角参数均值及RMSE
Table 4The average value and RMSE of extracted leaf length, leaf width and leaf insertion inclination of 6 different cultivar maize plants
| 株型参数 Morphological parameters | 京科665 JK665 | 京科968 JK968 | MC812 | 农大108 ND108 | 先玉335 XY335 | 郑单958 ZD958 |
|---|---|---|---|---|---|---|
| 实测叶长均值 Mean of measured leaf length (cm) | 75.27 | 81.08 | 70.61 | 89.72 | 73.46 | 72.8 |
| 叶长RMSE RMSE of extracted leaf length (cm) | 3.23 | 3.97 | 2.88 | 3.36 | 3.66 | 3.56 |
| 叶长MAPE MAPE of extracted leaf length (%) | 4.01 | 4.45 | 3.37 | 3.48 | 5.27 | 3.77 |
| 实测叶宽均值 Mean of measured leaf width (cm) | 10.35 | 9.63 | 9.33 | 10.92 | 9.59 | 8.73 |
| 叶宽RMSE RMSE of extracted leaf width (cm) | 0.73 | 0.93 | 0.70 | 0.91 | 0.53 | 0.99 |
| 叶宽MAPE MAPE of extracted leaf width (%) | 5.92 | 7.83 | 6.38 | 6.93 | 5.58 | 10.61 |
| 实测叶倾角均值 Mean of measured leaf angle (°) | 66.00 | 65.77 | 63.75 | 66.50 | 56.36 | 68.00 |
| 叶倾角RMSE RMSE of extracted leaf angle (°) | 4.13 | 3.34 | 3.88 | 3.99 | 2.31 | 2.82 |
| 叶倾角MAPE MAPE of extracted leaf angle (%) | 5.66 | 4.84 | 5.52 | 5.23 | 3.80 | 3.26 |
新窗口打开
上述方法均已被封装到基于三维数字化的玉米株型分析软件MaizeTypeAns中,并在玉米植株三维数字化数据标准化获取以及玉米株型分析研究中发挥重要作用。
3 讨论
与传统人工测量株型参数方式相比,获取玉米植株三维数字化数据工作量与测量植株所有叶的叶长、叶宽、叶倾角和方位角工作量相当;但人工测量常因测量值范围估计和每个测量者的方式不同,同一植株测量数据常存在偏差,而利用三维数字化数据提取株型参数因其具有一致的数据获取和参数提取标准,所提取株型参数具有较高精度和一致性。需要注意的是,方法对三维数字化数据获取操作要求较高,一个误操作可能导致提取的多个株型参数都是有误的,因此需要在数据获取时以可视化的方式,严格保证数据获取准确性。为实现玉米株型参数精确提取所获取的植株三维数字化数据包含精确的植株三维结构信息,可用于重构玉米植株和冠层三维模型,在此基础上,研究者可进一步开展玉米冠层结构参数的精确计算和基于可视化模型的玉米结构功能计算分析研究。
目前基于图像[13]和三维点云[30]的植物表型参数提取工作研究进展迅速,其核心技术是利用图像或三维点云提取植物的三维骨架结构。利用TOF相机获取玉米植株点云并提取株型参数方法[15]所提取的叶长与叶倾角平均参数误差分别是10.25%与11.09%,且其利用初步骨架提取方法所得到的叶倾角平均误差更是高达79.96%,其主要是由于点云精度和骨架提取方法准确性的限制。与之相比,本方法因直接获取了上述方法拟提取的植株三维骨架,极大程度地保证了骨架三维位置精度,故所提取株型参数精度较高。在实现玉米植株骨架精确提取的基础上,本方法可与上述方法结合,实现更精确的玉米表型参数提取。
在玉米植株方位平面提取方面,通过优化迭代计算动态圆上距离各输入角度距离绝对值之和最小的角度,得到玉米植株方位平面。与已有利用方位角负能量均值方法[11]对植株方位平面的近似估计相比,本方法可给出玉米植株方位平面角更确切的定量化描述,所对应dev偏离值均小于等于传统方法方位角均值的偏离值。玉米植株方位平面的提取有助于研究玉米群体中个体因种植方式或资源竞争产生的朝向问题,并与物联网图像相结合[31],实现大田玉米中个体的精准方向定位等应用。
4 结论
利用三维数字化数据进行玉米株型特征提取的方法具有快速、准确的特点。方法所提取的株型参数在保证精度的前提下具有较好的一致性,所提取的叶长、叶宽、叶倾角和方位角RMSE均值分别为3.44 cm、0.80 cm、3.41°和8.23°;叶长、叶宽和叶倾角的MAPE均值分别为4.06%、7.21%和4.72%。利用三维数字化数据进行玉米株型参数提取是精确分析不同品种、不同栽培处理等产生株型差异的一种重要手段。提出新的玉米植株方位平面计算方法给出了玉米植株方位平面更确切的定量化描述,使得植株方位平面是距离各叶方位角距离之和最小的平面位置,并采用dev偏离值作为玉米叶偏离植株方位平面离散值的一个指标,对于玉米株型的定量评价具有一定价值。此外,作物叶方位角分布研究是作物形态结构研究的重要问题之一,其对作物群体效应具有重要影响,本文的植株方位平面计算方法为其他作物叶方位角分布研究提供了参考。The authors have declared that no competing interests exist.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}