香港中文大學(中大)機械與自動化工程學系副教授張立教授領導的研究團隊,最近將動物集體行動的特性引入納米機械人,成功控制納米機械人群體進行形態轉變和分裂成多個微型群體。這種具有環境適應性、可重組的微型群體在生物醫學應用具有很大的潛力,例如用作標靶治療。研究結果已在頂尖國際科學期刊Nature Communications發表。
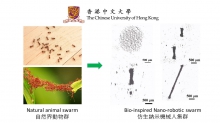
動物集體行動在自然界並不罕見,大大小小的群體例如鳥群、魚群和細菌菌落等,每個個體之間會互相溝通,根據其所在的環境改變群體形態,例如一群螞蟻互相支撐身體以形成鏈狀形態,穿越複雜地形。受到自然界的啟發,研究人員希望將這個特性賦予納米機械人,使它們可以相互協作,完成單一納米機械人群體無法實現的目標。
張教授的團隊利用動態自組裝技術,成功將幾百萬個分散的磁性納米粒子組裝成可控的人工微型群體。透過調節磁場的振幅和頻率,這一種條狀微型群體可以進行多種可逆的形態變化,包括伸長和縮短,還有可控的分裂和融合。
張教授表示:「這種微型群體除了為微加工和精密控制等工業技術提供有效解決方案外,在標靶治療方面亦有很大的應用潛力。研究人員可透過對納米機械人群體進行編程,在微創手術中協助醫生進行複雜的任務,例如穿過人體內的狹小通道。團隊正與中大醫學院合作,進一步研究如何將納米機械人的群體特性應用於臨床體內檢測及治療。」
該研究由香港研究資助局(RGC)、創新科技署(ITC)及中大天石機器人研究所(CURI)資助。張教授的主要研究領域包括微米/納米機器人及其生物醫學應用。張教授團隊的研究成果已發表在機器人學和材料科學的頂級期刊上,如Science Robotics, Nature Communications, International Journal of Robotics Research, IEEE Transactions on Robotics, Soft Robotics, Advanced Functional Materials, and Sensors & Actuators B.
