摘要: 量子计量是超冷原子气体研究中的一个热点领域. 超冷原子体系独特的量子性质(量子纠缠)和量子效应有助于大幅度提高待测物理量的测量精度, 这已经成为量子精密测量中的共识. 量子Fisher信息对该领域的发展起了非常重要的作用. 本文首先介绍量子Fisher信息的基本概念和量子计量的主要内容; 然后简要回顾这些理论在提高测量精度方面的应用, 特别是多粒子量子纠缠态的产生及其判定; 再介绍线性和非线性原子干涉仪的相关进展; 最后论述量子测量过程中的统计方法的研究进展.
关键词: 量子计量 /
超冷原子 /
量子Fisher信息 /
量子纠缠 English Abstract Development on quantum metrology with quantum Fisher information Ren Zhi-Hong Li Yan Li Yan-Na Li Wei-Dong Institute of Theoretical Physics, State Key Laboratory of Quantum Optics and Quantum Optics Devices, Collaborative Innovation Center of Extreme Optics, Shanxi University, Taiyuan 030006, China Fund Project: Project supported by the National Key R&D Program of China (Grant Nos. 2017YFA0304500, 2017YFA0304203), the National Natural Science Foundation of China (Grant No. 11874247), the 111 Plan of China (Grant No. D18001), the Hundred Talent Program of Shanxi Province, China (2018), and the Program of State Key Laboratory of Quantum Optics and Quantum Optics Devices, China (Grant No. KF201703).Received Date: 06 November 2018Accepted Date: 18 January 2019Available Online: 01 February 2019Published Online: 20 February 2019Abstract: Quantum metrology is one of the hot topics in ultra-cold atoms physics. It is now well established that with the help of entanglement, the measurement sensitivity can be greatly improved with respect to the current generation of interferometers that are using classical sources of particles. Recently, Quantum Fisher information plays an important role in this field. In this paper, a brief introduction on Quantum metrology is presented highlighting the role of the Quantum Fisher information. And then a brief review on the recent developments for i) criteria of multi-particle entanglement and its experimental generation; ii) linear and non-linear atomic interferometers; iii) the effective statistical methods for the analysis of the experimental data.Keywords: quantum metrology /ultra-cold atoms /quantum Fisher information /quantum entanglement 全文HTML --> --> --> 1.量子计量简介 量子计量研究如何利用量子属性、量子效应来提高物理量的测量精度, 以期突破散粒噪声极限(shot noise limit, SNL)(或者标准量子极限(standard quantum limit, SQL)), 趋近海森伯极限(Heisenberg limit, HL). 大多数需要精密测量的物理量(如电磁场场强、微弱惯性力以及时间频率标准等)都能被投影到相位上, 而这些相位可以利用干涉仪进行推断估计. 因此, 干涉仪的设计是量子计量中的核心内容之一. 由于没有与相位对应的厄米算符, 因此其不能直接被实验测量, 只能通过估计的方法获取. 因此, 相位估计(phase estimation)就成为精密测量(量子计量)中的一个重要内容. 一个完整的相位估计过程(如: 引力波测量、原子钟以及重力测量仪等)一般由如下几部分组成: N 粒子探测态制备、相位$(\theta )$ 累积、可测物理量(M )的测量以及相位$({\varTheta} )$ 估计(如图1 所示). 换言之, 量子计量的目的就是研究如何在探测粒子数$(N)$ 给定、相互作用(相位累积)时间有限的前提下, 尽可能获得精确(小涨落${\text{Δ}}\theta$ )的参数估计. 噪声(noise)是决定${\text{Δ}}\theta$ 大小的重要因素, 通常可分为经典噪声和量子噪声[1 ] . 一般地讲, 经典噪声是非本质的, 总是可以被克服(或抑制), 而量子噪声由量子力学的基本原理决定[2 ] , 是本质的、不可克服的. 目前双模式的原子干涉仪的测量精度已经接近标准量子极限, 即${\text{Δ}}\theta_{\rm SQL} = 1/\sqrt{N}$ , 其中$ N $ 是探测态中非关联的粒子数[3 ] . 标准量子极限来源于测量的统计属性, 是中心极限定理的直接结论[4 ,5 ] . 早期的理论研究表明, 标准量子极限是可以被突破的[6 -8 ] . 利用超冷原子系统的量子特性, 实验上已经在突破标准量子极限的方向上取得了显著的进展(见图2 ). 如何在有限的量子资源下突破标准量子极限、趋近海森伯极限是量子计量学研究的核心问题之一[9 -21 ] .图 1 相位估计的流程示意图 (1) 探测量子初态$\hat{\rho}$ 的制备; (2)待测相位$\theta$ 的编码, 量子初态演化为$\hat{\rho}(\theta)$ ; (3) 正定的测量算符(POVM)对末态进行测量; (4)待测相位的统计估计${\varTheta}$ . 图的下部分是马赫曾德(Mach-Zehnder, MZ)干涉仪的应用实例. 图取自文献[4 ]Figure1. Here we schematically plot the elements of complete phase estimation: (1) the preparation of prob state $\hat{\rho}(0)$ ; (2) the encoding of phase shift $\theta$ , which transform the probe state to $\hat{\rho}(\theta)$ ; (3) the readout measurement of the POVM and finally (4) the mapping from the measurement results to the phase provided by the estimator ${\varTheta}$ . The phase sensitivity crucially depends on all these operations. The lower panel shows the application to Mach-Zehnder interferometry. Adapted from Ref. [4 ].图 2 近年来利用超冷原子体系取得的超越标准量子极限的实验进展. 对数增益(左): $10\log_{10} ({\text{Δ}}\theta_{\rm{SQL}} / {\text{Δ}}\theta)^2$ 和对应的线性增益(右): $({\text{Δ}}\theta_{\rm{SQL}} / {\text{Δ}}\theta)^2$ , 其中$({\text{Δ}}\theta)^2 = {\text{ξ}}_{\rm R}^2/N$ 或者$({\text{Δ}}\theta)^2 = 1/F_{\rm Q}$ , ${\text{ξ}}_{\rm R}^2$ 为自旋压缩参数, $F_{\rm Q}$ 为量子Fisher信息. 空心图标为净增益, 即去除测量误差的增益; 实心图标为可能增益, 即实验纠缠态的可能增益; 十字交叉图标为干涉仪增益, 即通过干涉仪验证的增益. $N$ 为实验中所用的总粒子数目(或平均数目). 图取自文献[5 ]Figure2. Gain of phase sensitivity over the standard quantum limit $\Delta\theta_{\rm{SQL}}=1/\sqrt{N}$ achieved form recent Bose-Einstein condensates experiments. The logarithmic gain is shown in left, $10\log_{10} ({\text{Δ}}\theta_{\rm{SQL}} / {\text{Δ}}\theta)^2$ and the linear gain is in right, $({\text{Δ}}\theta_{\rm{SQL}} / {\text{Δ}}\theta)^2$ . The measured phase precision is obtained by spin-squeezing parameter ${\text{ξ}}_{\rm R}^2$ , i.e., $({\text{Δ}}\theta)^2 = {\text{ξ}}_{\rm R}^2/N$ , or from $F_{\rm Q}$ , i.e., $({\text{Δ}}\theta)^2=1/F_{\rm Q}$ . Open patterns are inferred values, being obtained after subtraction of detection noise; Filled patterns report witnesses of metrologically useful entanglement measured on experimentally generated states, representing potential improvement in sensitivity; Cross patterns show the measured phase sensitivity gain obtained from a full interferometer sequence. Here $N$ is the total number of particles (or mean total) used in experiments. Adapted from Ref. [5 ].[22 ] . 目前原子干涉仪在重力[23 -26 ] 、惯性力[27 -34 ] 等方面的测量已经达到了很高的精度. 国内的相关进展, 可参见近期《物理学报》关于“精密测量的专题”[35 ] .[36 ] 对原子跃迁频率的测量是近代原子钟频率基准的核心技术之一[37 ,38 ] . 超冷原子系统不仅在推动精密测量方面具有非常重要的意义, 而且对深入理解量子力学的基本问题(比如: 量子力学非定域性、量子纠缠等)也有重要的促进作用[39 ] (某种意义上也促进了对量子理论基本问题的进一步思考, 比如: 量子力学诠释问题的重新讨论[39 ] ). 传统的量子计量存在一些缺点:一方面, 量子计量原则上要求多粒子(通常成百上千)组成的量子态作为探测态, 但是对这些粒子同时进行单独测量是非常困难的; 另一方面, 多粒子量子态重构所要求的独立测量次数呈指数形式增加, 这也是一个难以克服的困难. 因此, 需要发展一种全新的、基于有限次测量的多粒子量子纠缠态刻画的理论方法. 目前, 对多粒子量子体系的操作(或测量)基本上都是同时的集体(collective)操作(或测量), 新方法需能够从集体操作过程中汲取多粒子量子关联态的信息.1.1.历史回顾 1.1.历史回顾 早在1873年, Maxwell(麦克斯韦)[40 ] 就提议将波长为长度单位的光波的振动周期作为时间单位. 但是当时的技术水平无法测量如此短的时间周期. 一直到1937年, 一系列新发明和技术进步(如: O. Stern改进了分子束控制技术和Stern-Gerlach实验[41 ] )才使得原子内部能级的跃迁频率作为时间标准成为可能[37 ] . 同年, Rabi(拉比)[42 ] 首次观测到中性分子的磁共振效应, 并建议利用这种效应发展时间频率标准. 1939年, 实验上首次观测到了分子内部能级磁共振现象[41 ] . 这些工作为后来原子束磁共振频率钟的研究奠定了基础[37 ] . 1945年, 第一台原子钟研制成功, 尽管其精度不如同时期的机械(Mechanical)钟和石英(Quartz)钟, 但是由于原子内部能级具有稳定性和一致性, 所以对原子钟的研究并未停止. 随着1949年Ramsey干涉仪原理的揭示[36 ] , 实现原子钟道路上的最后一个科学堡垒终于被攻克了. 1967年, 对铯-133原子的基态超精细能级(钟能级)跃迁频率的测量已经可以精确到约$10^{-10}$ , 较机械钟和石英钟的$ 10^{-8} $ 提高了近$ 2 $ 个数量级. 因此, 铯-133原子钟的跃迁周期被重新定义为秒的国际单位[43 ] , 这真正意义上完成了利用量子系统(或量子效应)实现时间标准的设想. 从一定意义上讲, 对频率(时间)测量精度的不断追求推动了量子计量的发展[44 ] , 时间测量精度提高的进程与量子计量发展的过程密不可分. 目前所有的可测物理量中, 时间测量的精度最高[43 ] . 事实上, 得益于时间测量的超高精确度, 对相关物理量的测量(长度、速度以及电压等)也可以达到非常高的精度.[4 ,36 ,37 ] , 下面简要回顾量子计量理论发展过程中几个里程碑式的重要进展: 1981年, Caves[45 ] 指出在光学Michelson-Morley干涉仪的闭置端输入压缩真空态可以突破标准量子极限; 随后的二十年里, 人们逐步认识到将探测的量子态改为具有一定量子关联的非经典态可以大幅增加测量的精度, 突破散粒噪声(标准量子)极限[4 ,7 ,46 ] . 近些年的研究[3 ] 表明突破标准量子极限需要将探测态改为量子纠缠态. 然而, 并非所有的量子纠缠态都对提高量子计量的测量精度有益, 只有那些可以被量子Fisher信息识别、对量子计量有用的多粒子量子纠缠态才可以真正地增强量子测量的测量精度[5 ,47 ,48 ] . 因此, 如何甄别和利用量子态(特别是多粒子量子纠缠态的量子属性[5 ] 和其他量子效应[49 ] )来提高量子测量的测量精度, 成为了量子计量的重要研究内容. 本文将针对这些内容进行介绍. 需要指出的是, 量子Fisher信息作为甄别幺正操作下量子态纠缠特性的重要基本概念, 在量子相变等其他热点问题中也有广泛的应用[50 -59 ] , 但这部分内容不在本文的讨论范围之内.1.2.相关的基本概念 -->1.2.相关的基本概念 统计估计的精度到底是多少?是否存在一个基本的极限?这是统计推断(statistical inference)中的核心问题之一. 早在20世纪40年代, Rao[60 ] , Cramér[61 ] 以及Fréchet[62 ] 就分别独立证明了对于单变量的统计估计存在一个最低的极限(随后由Darmois[63 ] 将上述结果推广到多变量情况). 这个极限就是Cramer-Rao下界(Cramer-Rao lower bound, CRB), 其与Fisher[64 ] 早些年提出的Fisher信息有直接关系(在相位估计理论中, 还存在许多其他极限. 特别是在有限测量次数时, 有些比CRB更为严格, 本文将在第四部分简单介绍). 因此, Fisher信息是相位估计理论中的核心概念. 考虑所有可能的量子测量条件, Fisher信息的最大值被称为量子Fisher信息[1 ,65 ] . 相应地可定义量子Cramer-Rao下界(quantum Cramer-Rao lower bound, QCRB)[2 ,66 ,67 ] .68 ,69 ]. 在介绍和证明QCRB之前, 先介绍似然(likelihood)函数和估计子.图1 所示, 一个完整的相位估计单元包括: 初始的探测态$\hat{\rho}$ 的制备; 一种可参数(实数$ \theta $ )化的、对探测态的操作(如: 干涉仪的转动操作, 参见第三部分内容); 利用末态(输出态)$\hat{\rho}(\theta)$ 获得可测物理量的测量值($ \varepsilon $ ); 对待测参数$ \theta $ 的估计(通过对多次测量结果的统计分析而获得). 这里的测量结果既可以是分离变量(如MZ干涉仪中的粒子数), 也可以是连续变量(如双缝干涉仪中的干涉条纹). 一般地, 量子测量用一个正定的测量算符(positive-operator valued measure, POVM)表示(测量理论中的算符在一定程度上具有测度的意义, 因为它不只是一个力学量, 同时还将概率算符与测度相联系. 因此, 严格地说此算符为测度算符). POVM算符$(\hat {E}(\varepsilon))$ 是一个厄米算符, 需满足两个基本要求: 1) 概率测量值非负; 2) $\sum _{\varepsilon} \hat{E}(\varepsilon) = \mathbb{1}$ . 给定$ \theta $ 时, 获得测量值为$ \varepsilon $ 的条件概率分布函数(亦被称为似然函数)定义为$ m $ 个独立的子系统组成, 对每个子系统进行统计独立地测量, 得到的$ m $ 个不同的测量值表示为${{\varepsilon}} = \{\varepsilon_1,\varepsilon_2,\cdots,\varepsilon _{m} \}$ . 此时, 可将(1 )式改写为$P({{\varepsilon}}|\theta) = {\rm {Tr}} [ \hat{E}({{\varepsilon}}) \hat{\rho}(\theta) ]$ . 探测初态的组成成份之间没有量子关联时, 称为经典可分的初态, 可以表示为2 )式的量子态, 则称为量子纠缠态. 在局域操作的作用下, 末态可以写为$\hat{\rho}(\theta) =$ $ \hat{\rho}^{(1)}(\theta)\otimes \hat{\rho}^{(2)}(\theta) \otimes \hat{\rho}^{(3)}(\theta) \otimes \cdots \otimes \hat{\rho}^{(m)}(\theta)$ , 选用统计独立的$ m $ 次POVM测量$P_i(\varepsilon_i|\theta) = {\rm{Tr}} [ \hat{E}^{(i)}(\varepsilon_i) \hat{\rho}^{(i)}(\theta) ]$ . 显然, 该分布函数满足归一化条件$\sum_{i = 1}^{m} P_i(\varepsilon_i|\theta) = 1$ . 计算中, 通常采用对数似然(log-likelihood)函数${{\varepsilon}}$ 而言, 估计子${\varTheta}({{\varepsilon}})$ 表示从测量结果${{\varepsilon}}$ 到参数空间的映射, 换言之, 它表示测量结果与估计相位${\varTheta}$ 之间的函数关系. 这种关系当然要仔细地选取, 以使估计的相位${\varTheta}$ 与真实的未知参数$ \theta $ 尽可能相同. 如(105 )式所示, 最大似然估计就是一个常用的估计子. 由于测量过程中不可避免地存在干扰, 测量结果$ \varepsilon_{i} $ 是由真实值决定的随机数. 因此, 估计结果也必然是一个与待测参数$ \theta $ 相关、满足一定分布的随机数, 通常可以用其平均值$\left\langle \cdots \right \rangle $ 表示统计平均.$\left\langle {\varTheta}({{\varepsilon}}) \right \rangle_{\theta} = $ $\theta, \forall \theta$ . 显然, 对于无偏差估计, 有$\dfrac{\partial \left\langle {\varTheta} \right \rangle_{\theta} } {\partial \theta} = 1$ . 如果一个估计只对于某些$ \theta $ 是无偏差的, 称之为局域无偏差估计(locally unbaised)(特别地, 如果无偏差估计在$ \theta_0 $ 处是局域无偏差的, 则$ \dfrac{\partial \left\langle {\varTheta} \right \rangle_{\theta} } {\partial \theta}|_{\theta = \theta_0} = 1 $ ). 进而对于$ m $ 次测量, 可对应地构造相应的估计子${\varTheta}(\varepsilon_1),$ ${\varTheta}(\varepsilon_1,\varepsilon_2), \cdots, {\varTheta}(\varepsilon_1,\varepsilon_2,\cdots,$ $ \varepsilon_m)$ . 如果$ \delta $ 是任意小量, 则该估计子被称为一致估计子.1.3.Fisher信息和Cramer-Rao lower bound (CRB) -->1.3.Fisher信息和Cramer-Rao lower bound (CRB) CRB是相位估计理论中一个非常重要的概念, 其受中心极限定理的保证. 对于任意的估计子${\varTheta}({{\varepsilon}})$ 而言, 其涨落((7 )式) 存在如下极限$ F(\theta)$ 就是Fisher信息9 )式是CRB的一般表达式. 对于无偏差估计而言, 即$\dfrac{\partial \left\langle {\varTheta} \right \rangle }{\partial \theta} = 1 $ , CRB表明测量的涨落与Fisher信息成反比. CRB可以通过考虑涨落的定义(7 )式、似然函数的归一化条件和柯西-施瓦茨(Cauchy-Schwartz)不等式来证明, 详细过程参见附录A1.$ \theta $ 无函数依赖关系, 即$\partial \varepsilon_{i} /\partial \theta $ = 0. 如果存在一个估计子可以达到CRB定义的最低限, 或者使Fisher信息取极大值, 称之为有效估计. 需要注意的是, 在测量次数有限时, 并不能保证存在这种有效估计. 有效估计与所讨论问题的统计分布函数相关. 但是, 在测量次数趋于无穷时, 则至少存在一个有效估计存在, 即最大似然估计.$\lambda_{\theta} = F(\theta)/(\partial \langle {\varTheta} \rangle_{\theta} /\partial \theta)$ . 遗憾的是, (11 )式仅能作为检验有效估计的重要条件, 但对如何构建有效估计并无明确的帮助.1.4.量子Fisher信息与量子CRB -->1.4.量子Fisher信息与量子CRB 1) 量子Fisher信息. 对所有可能的POVMs而言, Fisher信息((10 )式)的最大值就定义为量子Fisher信息[1 ] (本文将视情况使用不同的记号: 如果只是计算Fisher信息, 由于对所有测量值进行了求和, 此时Fisher 将只是参数$ \theta $ 的函数, 记为$ F(\theta) $ ; 而由于概率分布函数或是条件概率函数也与末态$ \hat{\rho}(\theta) $ 以及POVMs$ \{ \hat{E}(\varepsilon) \} $ 相关, 强调这些关系时, 记为$ F [ \hat{\rho}(\theta), \{ \hat{E}(\varepsilon) \} ] $ )[66 ] 证明量子Fisher信息可表示为$\hat{L}(\theta)$ 为对称对数导数(symmetric logarithmic derivative, SLD), 满足下面的方程式9 )式和(12 )式, 得到如下的连续不等式$\left( {\text{Δ}}{\varTheta}_{\rm {QCR}} \right )_{\theta}^2 = \dfrac{\left( \dfrac{\partial \left\langle {\varTheta} \right \rangle }{\partial \theta} \right)^2}{F_{\rm Q}[\hat{\rho}(\theta)]}$ . 需要强调的是(15 )式中等号成立的条件为$\lambda_{\theta,{{\varepsilon}}} = {\rm {Tr}}[\hat{\rho}(\theta) \hat{E}({{{\varepsilon}}}) ]/{\rm {Tr}}[ \hat{\rho}(\theta) \hat{L}_{\theta}\hat{E}({{{\varepsilon}}}) ]$ . (17 )式是由柯西-施瓦茨不等式得到的, 具体的证明过程见附录A2.13 )式)与具体的测量算符并无明显的依赖关系. 对于所有可能的POVMs而言, 至少存在一个POVM同时满足条件(16 )式和(17 )式, 使得Fisher信息取最大值. 如果$\hat{\rho}(\theta)$ 是可逆的, 对所有的${{\varepsilon}}$ 而言, 两条件可以等价为$ \left(\mathbb{1}-\lambda_{\theta,{{\varepsilon}}} \hat{L}_{\theta} \right) \hat{E}({{\varepsilon}}) = 0$ , $\lambda_{\theta,{{\varepsilon}}}$ 为实数; 而如果$\hat{\rho}(\theta)$ 是不可逆的, 则$ \left(\mathbb{1}-\lambda_{\theta,{{\varepsilon}}} \hat{L}_{\theta} \right) \hat{E}({{\varepsilon}}) = 0$ 是条件(17 )式成立的充分但不必要条件. 如果考虑${\hat{L}}_{\theta}$ 是厄米算符, 则存在一组完备的量子态$\{|\varphi_l \rangle\}$ , 使得${\hat{L}}_{\theta} |\varphi_l \rangle = \gamma_l |\varphi_l \rangle $ , 其中$\gamma_l$ 是实数. 如果选取由$\{ |\varphi_l \rangle \langle \varphi_l| \}$ 组成的POVM, 显然当$\lambda_{\theta} = 1/\gamma_l$ 时条件(17 )式成立, 同时${\rm{Tr}}[\hat{\rho}(\theta) \hat{L}_{\theta} \hat{E}(\boldsymbol{\varepsilon})]= \gamma_l \langle \varphi_l | \hat{\rho}(\theta) | \varphi_l \rangle| $ 为实数, 即(16 )式也成立. 这就证明了至少存在一个可以用$\hat{L}(\theta)$ 的正交归一基底组成的POVM, 可以使Fisher信息取到最大值, 即量子Fisher信息. 如(15 )式所示, 即使对最优化的POVM, Fisher信息和量子Fisher信息一样, 都是与$ \theta $ 相关的. 这在某种程度上产生了矛盾, 因为要找到一个优化的POVM使Fisher信息取最大, 需要事先知道未知参量$ \theta $ 的准确值, 这看起来是不可能的. 但是, 文献[70 ]表明, 可以利用一种渐近的方法来克服这个困难. 最近的研究[71 ] 也表明, 在一定条件下, 最优测量是不依赖于待测参数的.$\hat{\rho}(\theta) = \sum_{k} \gamma_k \hat{\rho}_k(\theta)$ , 其中$\gamma_k > 0$ 且$\sum_k \gamma_k = $ 1. 显然, ${\rm{Tr}}\left[ \hat{E} ({{{\varepsilon}}}) \hat{\rho}(\theta) \right] = \sum_k \gamma_k {\rm{Tr}}\left[ \hat{E} ({{{\varepsilon}}}) \hat{\rho}_k(\theta)\right]$ , 也就是[4 ,72 ] $F_k(\theta) = \sum_{{{\varepsilon}}} \dfrac{1}{P_k({{\varepsilon}} | \theta )} \left( \dfrac{{\rm d} P_k ({{\varepsilon}} | \theta )}{{\rm d} \theta} \right)^2$ 是第$ k $ 个组成成份的Fisher信息. (19 )式展示了Fisher信息的凸性. 类似地, 量子Fisher也具有同样的凸性, 即20 )式)表明, 将量子态进行线性混合并不能增加已获得的测量精度.$ m $ 个统计独立的子系统组成, 且就独立测量而言, Fisher信息(10 )式可以写为(由(5 )式可知$\left\langle \!\!{{{\left( {\dfrac{{\partial L}}{{\partial \theta }}} \right)\!}^2}} \!\right\rangle \!=\! \sum\limits_\varepsilon P ({\varepsilon _1}|\theta ) $ $\ldots P({\varepsilon _m}|\theta )\sum\limits_{i,j = 1}^m {\dfrac{\partial }{{\partial \theta }}} \log P({\varepsilon _i}|\theta )\dfrac{\partial }{{\partial \theta }}\log P({\varepsilon _j}|\theta ),$ 其中$ \varepsilon $ 是对所有可能的测量结果进行求和. 要证明(21 )式, 可以将求和项分为$ i = j $ $\sum\limits_{i = 1}^m {\sum\limits_\varepsilon P } ({\varepsilon _1}|\theta ) \ldots $ $P({\varepsilon _m}|\theta ){\left( {\dfrac{\partial }{{\partial \theta }}\log P({\varepsilon _i}|\theta )} \right)^2} = \sum\limits_{i = 1}^m {\sum\limits_{{\varepsilon _i}} P } ({\varepsilon _i}|\theta ){\left( {\dfrac{\partial }{{\partial \theta }}\log P({\varepsilon _i}|\theta )} \right)^2} = $ $\sum\limits_{i = 1}^m {{F_i}} (\theta ), $ 和$ i\neq j $ $\sum\limits_{i,j = 1.i \ne j}^m {\sum\limits_\varepsilon P } ({\varepsilon _1}|\theta ) \ldots P({\varepsilon _m}|\theta )\dfrac{\partial }{{\partial \theta }} $ $\log P({\varepsilon _i}|\theta )\dfrac{\partial }{{\partial \theta }}\log P({\varepsilon _j}|\theta ) = \sum\limits_{i,j = 1.i \ne j}^m {\sum\limits_{{\varepsilon _i}} {\dfrac{{\partial P({\varepsilon _i}|\theta )}}{{\partial \theta }}} } \sum\limits_{{\varepsilon _j}} {\dfrac{{\partial P({\varepsilon _j}|\theta )}}{{\partial \theta }}}$ = 0. 最后的等号是考虑了概率分布的归一化条件)$F_i(\theta) = \sum_{\varepsilon_i} \dfrac{1}{P(\varepsilon_i|\theta)} \left(\dfrac{\partial P(\varepsilon_i|\theta)}{\partial \theta} \right)^2$ 是第$ i $ 个子系统的Fisher信息, 求和是对该子系统所有可能的测量结果$\varepsilon_i$ 进行的. 如果组成的子系统是全同系统, 且采用相同的POVMs, 则有9 )式)可以写为2 )式和(14 )式, 对称对数导数可以表示为$\hat{L}_{\theta} = \sum_{i = 1}^m \hat{L}_{\theta}^{(i)}$ , 其中$\hat{L}_{\theta}^{(i)}$ 满足方程式$2 \partial_{\theta} \hat{\rho}^{(i)}(\theta) = \hat{L}_{\theta}^{(i)} \hat{\rho}^{(i)}(\theta) + \hat{\rho}^{(i)}(\theta) \hat{L}_{\theta}^{(i)} $ (由式(2 )式, 可以有$\dfrac{{\partial \hat \rho }}{{\partial \theta }} = \dfrac{{\partial {{\hat \rho }^{(1)}}}}{{\partial \theta }} \otimes {\hat \rho ^{(2)}} \ldots \otimes {\hat \rho ^{(m)}} + {\hat \rho ^{(1)}} $ $\otimes \dfrac{{\partial {{\hat \rho }^{(2)}}}}{{\partial \theta }} \ldots \otimes {\hat \rho ^{(m)}} + \ldots = \dfrac{{\left( {\sum\limits_{i = 1}^m {\hat L_\theta ^{(i)}} } \right)\hat \rho + \hat \rho \left( {\sum\limits_{i = 1}^m {\hat L_\theta ^{(i)}} } \right)}}{2}.$ 考虑(14 )式, 有$ \hat{A}\hat{\rho}+\hat{\rho} \hat{A} = 0 $ , 其中$ \hat{A} = \sum_{i = 1}^m $ $\hat{L}_{\theta}^{(i)} -\hat{L}_{\theta} $ . 在密度矩阵的本征态空间中, 可看到$ \left(p_k+p_{k'} A_{k,k'} = 0 \right) $ 和 $ A_{kk'} = \langle k| \hat{A} | k' \rangle $ . 因此, 只有在$ p_k+p_{k'} = 0 $ 时, 才可能有$ A_{kk'}\neq0 $ . 此时(或此子空间内), $ \hat{L}_{\theta} $ 对量子Fisher信息没有贡献). 再考虑${\rm{Tr}}[\hat{L}_{\theta}^{(i)} \hat{\rho}^{(i)}(\theta) ] = 0$ , 量子Fisher信息可以重写为$F_{\rm Q}[\hat{\rho}^{(i)}(\theta)] = {\rm{Tr}}\left[ \hat{\rho}^{(i)}(\theta) \left( \hat{L}_{\theta}^{(i)} \right)^2 \right]$ 为第$ m $ 个子系统的量子Fisher信息, 优化的POVM({$\hat{E}^{(i)}(\varepsilon_i)$ }) 需满足条件(16 )式和(17 )式. 如果各个子系统是全同的$\hat{\rho}^{(i)}(\theta) = \hat{\rho}'(\theta)$ , 则$F_{\rm Q}[\hat{\rho}(\theta)] = m F_{\rm Q}[\hat{\rho}'(\theta)]$ .[72 ] ).?下面利用密度矩阵的本征基矢, $\hat{\rho}(\theta) = \sum_{k} p_k | k \rangle \langle k | $ , 给出量子Fisher信息的表达形式. 显然, 有$p_k \geqslant 0$ 且, $\sum_{k} p_k = 1$ (为简化记号, 没有在$ p_k $ 和态矢量$ |k\rangle $ 中写出对$ \theta $ 的依赖关系). 在这个本征基下面, 单量子态的Fisher信息可以写为$\langle k| \hat{L}_{\theta} | k' \rangle$ 在条件$p_k+$ $p_{k'}>0 $ 条件下的具体表达式. 利用SLD的定义表达式(14 )式可以得到$\langle k| \hat{L}_{\theta} | k' \rangle = 2 \langle k| \partial_{\theta} \hat{\rho}({\theta}) | k' \rangle/$ $\left(p_k+p_{k'} \right)$ . 代入(26 )式, 就得到了混合态的量子Fisher信息27 )式中的求和, 需将$p_k+p_{k'} = 0$ 的情况排除在外. 首先考虑$\partial_{\theta} \langle k | k'\rangle = \langle\partial_{\theta} k | k'\rangle + \langle k |\partial_{\theta} k'\rangle = 0$ , 可以得到[1 ] :29 )式存在奇点, 将造成求解的困难. 此时, 量子Fisher信息仍存在严格的求解方法[73 -75 ] . 对称对数导数在量子Fisher信息的计算中起重要的作用, 因而对称对数导数的本征态又与最优测量有密切的关系[76 ] .$|\psi(\theta) \rangle$ 而言, 有$\bbbone = |\psi (\theta )\rangle \langle \psi(\theta) |+$ $\sum_{k_{\bot}} |k_{\bot} \rangle \langle k_{\bot} |$ , 其中$\{ k_{\bot}\}$ 表示在希尔伯特空间中与$|\psi(\theta) \rangle$ 垂直的基矢. 因此, 密度矩阵可以写为$\hat{\rho}(\theta) = |\psi(\theta) \rangle \langle \psi(\theta) |+\sum_{k_{\bot}} p_ {k_{\bot}}|k_{\bot} \rangle \langle k_{\bot} |$ . 由于是纯态, 所以事实上, $p_{k_{\bot}} = 0, \forall k_{\bot}$ . 故而(28 )式和(29 )式(利用纯态的性质$ \hat{\rho}^2(\theta) = \hat{\rho}(\theta) $ , 可以有$ \hat{L}_{\theta} = 2\partial_{\theta} \hat{\rho} $ , 与(30 )式相同. 再考虑量子Fisher信息的定义(13 )式以及$ \partial_{\theta} \langle \psi(\theta) | \psi(\theta) \rangle = \langle \partial_{\theta} \psi(\theta) | \psi(\theta) \rangle + $ $ \langle \psi(\theta) | \partial_{\theta} \psi(\theta) \rangle = 0 $ , 可以直接得到(31 )式)可以分别写为31 )式还可以利用在探测初态与其垂直空间的投影测量, 在$\theta \rightarrow 0$ 下, 渐近地得到. 具体证明见文献[4 ].$\hat{H}$ 是某种对初始量子态$\hat{\rho}_0$ 的相互作用(或是操作的变换的生成元). (32 )式是通常情况下将待测参数$\theta$ 耦合到初始态(测量态)$\hat{\rho}_0$ ( 比如(68 )式描述的干涉仪等)的一般表示形式. 为简单起见, 采用密度矩阵的对角化表象, 即$\hat{\rho}_0 = $ $ \sum_k p_k |k\rangle \langle k |$ , 进行计算. 这样得到$\hat{\rho}(\theta) \!=\! \sum_k p_k {\rm e}^{-{\rm i}\hat{H} \theta} |k\rangle $ $\langle k | {\rm e}^{{\rm i}\hat{H} \theta} $ . 注意幺正演化不改变密度矩阵的本征值. 同时, SLD可以表示为$\hat{L}_{\theta} = {\rm e}^{-{\rm i}\hat{H} \theta} \hat{L}_0 {\rm e}^{+{\rm i}\hat{H} \theta}$ . 由(14 )式可知, $\hat{L}_0$ 满足$\hat{H}$ 确实在量子演化过程中起到哈密顿量的作用. 由定义(14 )式知道,$\hat{L}_0$ 与密度算符的动力学演化相关. 最后得到关于量子Fisher信息的表达式34 )式并不显含$ \theta $ . 换而言之, 测量的精度与系统的初态$\hat{\rho}_0$ 有明显的依赖关系, 同时也与待测参数与探测态的耦合哈密顿量$\hat{H}$ (操作)关系密切, 但是与测量算符POVM的依赖性并不显然, 与$ \theta $ 的依赖关系仍在测量算符中体现. 在此情况下, 混合态的SLD以及量子Fisher信息可以表示为:$p_k+p_k' \neq 0$ 的态. 对纯态而言,$\hat{H}$ 与待测参数相关, 量子Fisher信息的求解变得复杂. 原则上, 可通过引入对参数的无穷小变化得到相应的量子Fisher信息, 细节见文献[77 ,78 ]. 最近, 有研究人员还研究了量子Fisher信息在不同退相干模型下的动力学行为[79 ] .$\hat{ M} = \sum_{\mu}$ $ c_{\mu} | \mu \rangle \langle \mu |$ , 其中$\{ | \mu \rangle \}$ 为一组正交完备基底, $\{ c_{\mu} \}$ 可以是复数. 这样, Fisher信息存在如下极限$f(\theta)$ 是关于$\theta$ 的任意函数, 而$\langle \hat{ M} \rangle = $ $ {\rm{Tr}}[\hat{ M} \hat{\rho}(\theta)] = \sum_{\mu} c_{\mu} P\left( \mu | \theta \right)$ .$\hat{ M}$ 是厄米算符, 此时$c_{\mu}$ 为实数. 若相位$\theta$ 通过幺正算符${\rm e}^{-{\rm i} \hat{H} \theta}$ 作用在探测初态$\hat{\rho}_0$ 上, 则由Ehrenfest定理, 可以得到${\rm i} {\rm d} \langle \hat{ M} \rangle /{\rm d} \theta \! =\! \langle [\hat{ M},\hat{H}] \rangle $ . 此时, 选取$f(\theta) = \langle \hat{ M} \rangle$ , 则有$\hat{ M} = \sum_{\mu} {\rm e}^{{\rm i} \mu} | \mu \rangle \langle \mu |$ 且$f(\theta) = 0$ , (39 )式可以写为${{\varepsilon}}$ 相关的似然分布函数的最大值所对应的相位值: ${\varTheta}_{\rm {MLE}}({{\varepsilon}}) = \rm{arg[max}_{\theta} \rm{P}({{\varepsilon}}|\theta)$ ]. 当测量的次数$ m $ 趋于无穷时, 最大似然算子的估计值满足以真实值为中心的高斯分布, 且其方差为Fisher信息的倒数:${\text{Δ}}\theta_{\rm {MLE}} = 1/ \sqrt{m F(\theta)}$ . 中心极限定理保证了最大似然估计子比其他的估计子都要好.$ \theta $ 的统计分布函数的整体性质. 利用$\bar{\mu} = (1/m)\sum_{i = 1}^{m}\mu_i$ 来定义对于$ m $ 次测量结果$\mu_1,\cdots,\mu_{m}$ 的平均值. 这种方法要求$\bar{\mu}$ 是关于待测参数$\theta$ 的单调函数, 或者至少在估计参数的局域区间内是单调的. 此估计方法的精度可以由误差传递公式(对估计值在真实值处作泰勒级数展开, $ \bar{\mu}_{m} \approx \bar{\mu} +\left( \bar{\mu}/{\rm d} \theta \right) ({\varTheta}_{\rm{mom}} -\theta) $ . 当$ m \gg 1 $ , 显然可以有(43 )式. 因为$ \bar{\mu}_{m} -\bar{\mu} \approx \Delta \mu /\sqrt{m} $ , 且${\varTheta}_{\rm{mom}}- $ $ \theta \approx \Delta \theta_{\rm{mom}} $ )给出:47 ]所表明的, 通常情况下(43 )式并不是最佳的, 即${\text{Δ}}\theta_{\rm{mom}} \leqslant {\text{Δ}}\theta_{\rm {CRB}}$ , 即使在中心极限定理条件下, 也不一定可以达到CRB. 只有当统计分布函数为高斯型时,${\rm d}\left( {\text{Δ}}\mu \right)/{\rm d}\theta \ll {\rm d} \bar{\mu}/{\rm d}\theta$ 时才可相等, 也就是说, 统计分布函数的主要特性都由它的平均值及其方差来刻画[4 ] . 另外, 也有研究表明, 误差传播公式在经典和量子情况下可以分别达到CRB和QCRB[80 ,81 ] . 鉴于其形式简单、意思明了, (43 )式在文献中被大量使用. 但是, 仍然有一些需要注意的地方, 具体请参见文献[5 ].2.多粒子量子纠缠态的制备与判别 利用量子Fisher信息与待测物理量测量精度的关系, 基于量子Fisher信息的多粒子量子纠缠判据已经得到了广泛的应用, 比如连续变量的纠缠判定[82 ] . 本节首先解释为何多粒子量子纠缠态可以提高量子计量的测量精度. 在上节介绍的量子Fisher信息基本概念的基础上, 给出一个关于多粒子(分离变量)量子纠缠态的判据, 进而给出对提高量子计算精度有用的多粒子量子纠缠态的定义. 利用条件概率分布函数, 介绍一种可以直接从实验数据中提取Fisher信息的方法; 利用实验结果对所提出的方法进行验证. 最后, 介绍一种利用光与原子相互作用产生不同自由度量子纠缠的新方案.2.1.统计距离与相位精度 2.1.统计距离与相位精度 被映射在量子态中的参数估计(或是相位估计)问题, 在很大程度上等价于如何有效区分参数空间中相邻量子态的能力[1 ,83 ] . 因此, 从这个角度来讲, 干涉仪的相位估计精度可以认为是其对可能的最小相位差导致的输出量子态$\hat{\rho}(\theta)$ 与初始探测态$\hat{\rho}(0)$ 的分辨能力. 这个性质可以通过定义在统计空间中的量子态的统计距离(statistical distance)来描述[84 ] [5 ] 46 )式被称为海林格统计距离(Hellinger distance), 其中$\mathcal{F}_{\rm{cl}}(P_0,P_{\theta}) = \sum_{\mu} \sqrt{P(\mu|0)P(\mu|\theta)}$ 是经典统计保真度(fidelity), 或是两个统计分布的重叠度, 亦或是Bhattacharyya系数[5 ] . 注意$d_{\rm H}$ 是非负的, 即$0\leqslant d_{\rm H} \leqslant 1$ . 在$\theta$ 非常小的情况下, 其相应的泰勒级数展开为47 )式表明, Fisher信息可以理解为某种统计速度$v_{\rm H} = \partial d_{\rm H}/\partial \theta = \sqrt{F(0)/8}$ 或者在最优测量条件下写为$\sqrt{F_{\rm Q}(\hat{\rho}_0)/8}$ . 它反映了统计分布函数在$\theta = 0$ (或者$\theta = \theta_0$ )时随参数$\theta$ 变化的某种速率. 必须指出的是, 在所有分析量子测量极限的问题中, 条件概率分布函数$P(\mu|\theta)$ 是一个共同的出发点[85 ] . 实验上, 固定待测参数($\theta_0$ ), 对测量量子态进行多次测量, 原则上可以得到在给定参数条件$(\theta = \theta_0)$ 下测量值空间中的分布函数$P(\mu|\theta_0)$ , 如图3 所示. 对待测参数进行改动$\theta = \theta_0+{\text{δ}} \theta$ , 重复之前的测量过程, 可以得到以$\theta_0$ 为参考点的邻近条件统计分布函数$P(\mu|\theta_0+{\text{δ}} \theta)$ . 因此, 原则上(47 )式提供了一种直接从实验数据中获取Fisher信息的方法[13 ,84 ] . 显而易见, (45 )式和(46 )式与具体的测量方式相关, 因此会有不同的统计距离定义. 比如, 也可利用信息论中描述两个邻近统计分布关系的物理量[86 ] 来表示, 即Kullback-Leibler(KL)熵图 3 统计区分度和统计速度的示意图. 在给定$\theta_0$ 的条件下, 分析测量数据可得分布函数$p({\mu}|\theta_0)$ (图(a)红线)和调节$\theta_0+\text{δ}\theta$ 后得分布函数$p({\mu}|\theta_0+\text{δ}\theta)$ (图(b)绿线). 图(c)示意由$\sqrt{p_0}=\sqrt{p({\mu}|\theta_0)}$ 和$\sqrt{p_{\text{δ}\theta}}=\sqrt{p({\mu}|\theta_0+\text{δ}\theta)}$ 定义的态矢量及其欧几里得距离(统计距离)$d_{\rm H}=2\|\sqrt{p_0}-\sqrt{p_{\text{δ}\theta}}\|$ , 其中$v=v_{\rm H}$ 是衡量统计区分度的统计速度. 图取自文献[84 ]Figure3. Here we give the sketch of statistical distinguishability and statistical speed. The probability distribution $p({\mu}|\theta_0)$ is obtained by collecting the measurement results ${\mu}$ for different values of the parameter, here chosen to be $\theta_0$ (red line) (a) and $\theta_0+\text{δ}\theta$ (green line)(b). (c) to quantify the statistical distinguishability between the two distributions we introduce unit vectors $\sqrt{p_0}=\sqrt{p({\mu}|\theta_0)}$ (red) and $\sqrt{p_{\text{δ}\theta}}=\sqrt{p({\mu}|\theta_0+\delta\theta)}$ (green), then we obtain the Euclidean distance between them: $d_{\rm H}=2\|\sqrt{p_0}-\sqrt{p_{\text{δ}\theta}}\|$ . Here the $v=v_{\rm H}$ denotes the statistical speed. Adapted from Ref. [84 ].48 )式中的${\text{δ}} \theta$ 作小量展开, 也能得到与(47 )式相似的关系式, $D_{\rm{KL}} \propto F(\theta_0)/$ $2 {\text{δ}} \theta^2$ . 因此, 也可以作为一种从实验数据中获取Fisher信息的有效办法. 有意思的是, 两者可以以一种有效的、互相辅助的方式来提高获取Fisher信息的准确程度[86 ] , 如图4 所示. 特别地, 当实验数据不是很完美时, 如实验的对比度不是很高(见条件(65 )式)或${\text{δ}}\theta$ 较大, 通过考虑高阶项的影响, (45 )式和(48 )式也可以作为一种有效的手段来获得Fisher信息[86 ] .图 4 海林格距离$d_{\rm H}^2$ (红线)和KL熵$2D_{\rm {KL}}$ (绿线), 以及他们共同的二阶展开项$F(\theta)\text{δ}\theta^2$ (蓝线)的比较. 图取自文献[84 ]Figure4. Hellinger distance, $d_{\rm H}^2$ (red line), KL entropy, $2D_{\rm {KL}}$ (green line), and their common low-order approximation, $F(\theta)\text{δ}\theta^2$ (blue line), as a function of $\theta$ . Adapted from Ref. [84 ].$d^2_{\rm H}(P_0,P_{\theta})$ 取最大值, 定义为Bures距离[5 ] $\mathcal{F}_{\rm{Q}}(\hat{\rho}_0,\hat{\rho}_{\theta}) = {\rm {Tr}}[ \sqrt{\sqrt{\hat{\rho}_{\theta}} \hat{\rho}_0 \sqrt{\hat{\rho}_{\theta}}}]$ 被称为平移概率(transition probability)或是量子保真度(fidelity)(参见文献[5 ]及其参考文献). 有意思的是, 保真度与量子Fisher信息具有明确的关系. 因此, 保真度也提供了一种给出Fisher信息的方法[87 ,88 ] . Uhlmann定理告诉我们$\mathcal{F}_{\rm{Q}}(\hat{\rho},\hat{\rho}_{\sigma}) = {\rm{max}}_{|\psi \rangle, |\phi \rangle}|\langle \psi | \phi \rangle|$ , 其中最大化对所有相关量子态$\hat{\rho}$ 和$\hat{\sigma}$ 的纯化波函数$| \psi \rangle$ 和 $|\phi \rangle$ 进行. 对于纯态而言, $\mathcal{F}_{\rm{Q}}(| \psi \rangle,|\phi \rangle) = |\langle \psi | \phi \rangle|$ . 量子Fisher信息还被证明与动力学压缩因子(dynamical susceptibility)有直接的对应关系[4 ] , 因此, 在与凝聚态物理相关的问题中也成为一个有用的概念[50 ,51 -55 ] , 这部分内容超出本文的范围, 此处不再讨论.5 ,89 ,90 ]. 这里采用6个$^9{\rm {Be}}^+$ [91 ] 和14个$^{40}{\rm {Ca}}^+$ [92 ] 离子的最大纠缠态(薛定谔猫态)$\exp(-{\rm i}\theta \hat{J}_z)$ , 初态(50 )式被演化为$|{{\varPsi}_{N,{\rm{cat}}}}\rangle =(\exp ({\rm i}\theta N/2)| \uparrow {\rangle ^{ \otimes N}} \!+\! \exp ( - {\rm i}\theta N/2)| \downarrow {\rangle ^{ \otimes N}})/$ $\sqrt 2 $ . 显然, $|\uparrow\rangle^{\otimes N}$ 与$|\downarrow\rangle^{\otimes N}$ 之间的相对相位差为$N\theta$ . 这个态可以通过将其绕$ x $ 轴进行${\text{π}}/2$ 转动来实现对它的测量. 对于离子实验而言, 可以用高灵敏的荧光探测方法获得不同量子态上的离子数信息[5 ] : 处于$|\uparrow \rangle$ 态上的粒子数$N_{\uparrow}$ 的概率为$(N_{\uparrow}|N,\theta) = $ $P 2^{-N}\left(^N _{N_a} \right) \{1+ (-1)^{N_{\uparrow}}\cos[N(\theta+{\text{π}}/2)] \} $ , 显然在$|\downarrow \rangle$ 上的粒子数为$N_{\downarrow} = N-N_{\uparrow}$ . 由于布局率$P(N_{\uparrow}|N,\theta)$ 随粒子数$ N $ 快速振荡, 因此, 与此态相关的可测物理量都将呈现出这种快速振荡的特性[93 ,94 ] . 实验上, 在量子计量的研究中(50 )式的特性可以通过对宇称性(parity)的测量[92 ] 来获得. 图5(a) 为一个典型的关于8离子的宇称性的测量结果[92 ] , 其条件概率分布函数满足图 5 宇称振荡的测量结果和提取的Fisher信息 (a) GHZ($N=8$ )的宇称测量图, 周期为$2\pi/8$ , 取自文献[92 ]; (b) 基于近期实验结果得到的Fisher信息与总粒子数$N$ 的关系$F=V^2N^2$ , 其中$V$ 为实验中的对比度. 上边界粗线为海森堡极限, 即$F=N^2$ , 下边界黑色粗线代表标准量子极限, $F=N$ . 图中其他的细线分别表示$k$ 粒子纠缠的边界, 即方程(60 ). 其中$N=10$ 的圆圈表明$4$ 粒子纠缠. 图取自文献[84 ]Figure5. Experimental results based on parity measurement and extracted Fisher information: (a) Typical parity oscillations obtained with cat states. The period is $2\pi/8$ . Adapted from [92 ]; (b) summary of the experimental achievements, ions (circle) and photons (square). Here we show the Fisher information as a function of the number of qubits $N$ , $F=V^2N^2$ , obtained from the extracted experimental visibilities $V$ . The upper thick line is the Heisenberg limit $F=N^2$ , the lower thick line is the standard quantum limit, $F=N$ . The different lines are bounds for useful $k$ -particle entanglement, Eq. (60 ).For instance, the filled circle at $N=10$ reveals useful $4$ -particle entanglement. Adapted from Ref. [84 ].$\pm$ 代表宇称测量结果为$\pm 1$ , $0\leqslant V \leqslant 1$ 是振荡曲线的可见度(visibility), 与测量的误差或是系统的噪声相关. 容易验证, 与测量分布函数(51 )式对应的Fisher信息(由于宇称测量为一种最优测量[94 ] , 因此, 此Fisher信息即为量子Fisher信息)为$\sin N\theta = \pm 1$ 时, (52 )式取极大值$V^2 N^2$ . 如前所述, 以图5(a) $N = 8$ 的离子实验为例, 为获取可以区分多粒子纠缠的量子Fisher信息值, 取$\theta_0 = {\text{π}}/(2\times 8)$ 为参考点, 在其附近取$\theta = \theta_0 \pm j {\text{δ}} \theta$ , 其中${\text{δ}} \theta = {\text{π}}/(4\times 16)$ , $j = \pm 1, \pm2$ . 如果有原始的实验数据(原则上, 对于每一个给定的$\theta$ , 需重复$ \nu $ 次的独立实验测量$P_{\nu}(+|\theta)$ ), 这些实验测量数据满足如图5(a) 所示的误差分布(即图中所示的平均值和误差). 在我们的数值模拟中, 由于没有直接的实验数据, 我们利用高斯分布的假定, 产生相应的随机数据, 并利用(45 )式或(48 )式得到它们的统计距离或是统计熵. 之后, 在参数空间($\theta$ )中, 对得到的统计距离(熵)在$\theta_0$ 附近作二阶或高阶拟合, 所得的参数即视为相应的量子Fisher信息. 图5(b) 即为利用所述方法, 对多个实验结果进行分析得到的结果. 这个方法最早由Fisher本人提出, 量子计量中首次采用该方法分析了Fisher信息与自旋压缩参数在多粒子纠缠态判据中的应用[4 ] . 我们将该方法推广, 分析了离子[91 ,92 ,95 ] 、光子[96 ,97 ] 等实验结果[84 ] . 关于利用Fisher信息对多粒子量子纠缠态进行判定的讨论将在下一小节中给出.2.2.量子纠缠与相位精度 -->2.2.量子纠缠与相位精度 1) 多粒子纠缠.?考虑多粒子(标记为$l = 1,2,\cdots,$ N )组成的系统, 每一个粒子可实现一个量子比特(可视为自旋). 如果系统的量子态是可区分的纯态(从粒子的角度来看), 则可以写为$|{\varPsi}^{(l)}\rangle$ 是第$ l $ 个粒子的量子比特. 如果是一个可区分的混合态, 则可以写为直积态的混合形式[98 ] $p_q\geqslant 0$ 且$\sum_q p_q = 1$ . 不可以写成如上直积形式的量子态被称为纠缠态(entangled)[99 -114 ] . 如果是两个粒子组成的系统, 则系统只能是两者之一. 而如果粒子数多于两个, 则量子态有多种不同的量子纠缠方式[102 ] (由于多粒子纠缠态在量子计量、量子信息以及新的量子技术中有重要应用, 对其量子纠缠的形式的区分或者判定是一个非常重要的课题). 多粒子的纠缠态可以用最多不可分的粒子数来进行量化(quantified). 与(53 )式相似, 一个纯的$ N $ 粒子态, 如果有$ k $ 可分的(或是$ k $ 重直积的), 可以写成$|{\varPsi}_{N_l}\rangle$ 是由一个$N_l \leqslant k$ 个粒子组成的量子态, 且$\sum_{i = 1}^M N_l = N$ . 类似地, 混合态[103 ] 可以定义为$ k $ 重可分而不能写为$ (k-1) $ 重的量子态, 称为$ k $ 粒子纠缠态, 它至少包含一个具有$ k $ 粒子的量子纠缠态; 同样地, 量子态的纠缠性亦可用纠缠深度(entanglement depth)来度量, 为比$ (k-1) $ 大的纠缠深度. 显然, 对于$ N $ 粒子组成的纠缠态, 其最大的纠缠粒子数为$ N $ , 即$ k = N $ . 最后, 由于量子态具有凸性, 因此$ k $ 可分的量子态中可含有$ k' < k $ 的可分态[99 ] .[47 ] 在2009年证明, 对任意由$ N $ 粒子组成的可分态, 即非量子纠缠态, 其量子Fisher信息存在一个上界$\hat{J}_n$ 为(68 )式中定义的集体自旋. 该不等式考虑了量子Fisher信息的凸性和可加性, 并同时考虑了$4 \left( {\text{Δ}}\sigma_n \right)^2 \leqslant 1$ [4 ] . 这样利用(9 )式, 并考虑无偏估计以及$ m $ 次完全独立的测量, 就得到标准量子极限(或者散粒噪声极限)的表达式58 )式中测量次数$ m $ 与探测态中粒子数$ N $ 有相似的作用, 只使用一个粒子作为探测态重复$ N $ 次相同的测量, 与使用具有$ N $ 个粒子作为探测态测量一次有着相同的测量精度. 这实际上是另一种与量子纠缠无关的量子增强测量理论的核心理念[49 ] .$\hat{\rho}$ 在(68 )式描述的操作下所得到的量子Fisher信息不满足(57 )式, 也就是说59 )式是量子态是多粒子量子纠缠的充分条件. 更准确地讲, (59 )式可以作为判定有利于量子计量精度提高的量子纠缠态的一个充分必要条件: 对于一个满足条件(59 )的量子态$\hat{\rho}$ 而言, 如果利用它作为探测态对某个小的相位$ \theta $ 进行估计, 假定该相位$ \theta $ 通过某种干涉仪的相互作用${\rm e}^{-{\rm i} \hat{J}_n \theta}$ ((68 )式)引入, 所能得到的测量精度将超过标准量子极限(58 )式. 这也意味着, 并非所有的量子纠缠态都对提高测量精度或是超越标准量子极限有用[47 ] . 而对测量精度提高不大的多粒子量子纠缠态可能有助于其他量子技术. 实际上, 量子技术依赖于对量子态的测量, 即依赖于对量子态自由度的操控. 同时, 即使是对测量有用的量子纠缠态, 对测量精度的提高也不尽相同: 具有较大量子Fisher信息的量子态, 同时也具有更深的纠缠深度. 对于$ k $ 组份的纠缠态((56 )式), 其量子Fisher信息满足如下不等式[100 ] $s = [N/k]$ 为$N/k$ 的整数部分, $r = N- s k$ (显然, 如果$ N $ 可以被$ k $ 整除, 则$s k^2+ r^2 = Nk$ ). 如果不满足(60 )式, 则探测态含有对测量有用的$ (k+1) $ 部分纠缠态, 也就是说, 如果用此态作为探测态, 将有可能获得较任何$ k $ 可分态更好的测量精度. 有意思的是, (60 )式随部分纠缠粒子数$ k $ 的增加而单调增加, 如图6 所示, 其中$F_{\rm Q}[\hat{\rho}_{k \rm{sep}}, \hat{J}_n] \leqslant Nk$ .图 6 有利于量子计量的$k$ 粒子纠缠判据. 图中蓝色的实线由方程(60 )给出: $k$ 粒子纠缠态的量子Fisher信息. 虚线为$F_{\rm Q}/N=k$ , 其中粒子数$N=100$ . 该图取自文献[100 ]Figure6. Useful $k$ -particle entanglement for quantum metrology. $k$ -separable states have a quantum Fisher information bounded by the solid line, Eq. (60 ). The dashed line is $F_{\rm Q}/N=k$ . Here $N=100$ . Adapted from Ref. [100 ].47 ]所证明的, 对于$ N $ 粒子组成的量子态而言, 最大的纠缠态(被称之为genuine $ N $ 粒子纠缠态)的量子Fisher信息存在上界9 )式可知, 测量精度满足61 )式确定了由量子理论决定的相位测量的新极限[3 ] , 称之为海森堡极限(Heisenger limit, HL)(海森伯极限最早在1993年由Holland和Burnett[105 ] 引入, 纪念海森伯不确定关系, 将它用在粒子数与相位的测不准关系中$ \Delta \theta \Delta N \geqslant 1 $ . 这里所说的海森伯极限特指$ \Delta \theta = \mathcal{O} (N^{-1}) $ )(也可以将输入干涉仪的粒子数$ N $ 与独立测量的次数$ m $ 一起进行优化[85 ,106 ,107 ] . 这样可将海森伯极限写为$ 1/N_{\rm T} $ , 其中$ N_{\rm T} = m_{\rm opt} N $ , $ m_{\rm opt} $ 是在给定测量粒子数$ N $ 时, 使测量精度最大的最优测量次数. 由于该测量次数可能与测量态粒子数相关, 因此, 尽管可能测量态的Fisher较$ N $ 大, 但其测度精度较标准极限$ 1/\sqrt{N_{\rm T}} $ 好). 不难看出, (58 )式与(62 )式对$ N $ 的依赖关系不同, 相差$1/\sqrt{N}$ 倍, 并且这个差别是不可能通过经典关联(或是可分的)态来克服的. 但需要注意的是, 克服标准量子极限(58 )式还可采用Multi-round的方法[3 ,5 ] .[7 ,46 ] 在1992年左右提出的自旋压缩因子$ \perp $ 表示Blcoh球上面与转轴$ n$ 、平均自旋$ s$ 垂直的方向矢量. 由定义(63 )式可知, 自旋压缩系数可以直接从实验测量的数据中获得, 具有非常好的实验友善性(见图2 中的部分实验结果). 自旋压缩因子${\text{ζ}}_{\rm R}^2$ 已经被证明可作为充分条件(${\text{ζ}}_{\rm R}^2 < 1$ ), 用于识别对提高测量结果的精度有利的多粒子量子纠缠态, 进而, 一个有利于提高量子测量精度的量子态的纠缠深度越高, 它的自旋压缩因子${\text{ζ}}_{\rm R}^2$ 就越小[104 ] . 2009年, Smerzi 证明了自旋压缩因子与量子Fisher 信息有如下关系:$F_{\rm Q}[\hat{\rho},\hat{J}_{ n}]$ 是对量子探测态$\hat{\rho}$ 进行幺正操作${\rm e}^{-{\rm i} \hat{J}_{ n} \theta}$ 下的量子Fisher信息. 依据文献[7 ,46 ], 如果${\text{ζ}}_{\rm R}^2 < $ 1, 那么该量子态为具有量子计量意义上的自旋压缩态, 沿$ \perp $ 方向的自旋可用于超越标准量子极限的测量. 由(64 )式不难看出, 这个条件与量子Fisher 信息对纠缠量子态的判别条件(59 )式完全等价. 即可以利用自旋压缩因子识别的多粒子量子纠缠态, 也可以利用量子Fisher信息进行识别. 但是, 反过来却并不一定成立, 即有一些可以利用量子Fisher信息识别的量子纠缠态, 利用自旋压缩因子是不能识别的, 至少对于部分非高斯型的量子态如此[13 ] . 从某种意义上讲, 自旋压缩态只是一类有利于提高测量精度或有益于量子计量的多粒子量子纠缠态. 因此, 在多粒子量子纠缠态判别上, 我们认为量子Fisher信息具有较自旋压缩因子更广泛的适用性.$ k $ 组份的多粒子量子纠缠判据(60 )式, 我们得到了图5 . 图中黑色的圆点为从实验中获得的宇称性测量结果的量子Fisher信息值[92 ] . 依据我们的计算, 这个实验结果声称得到了14个离子的多粒子纠缠态, 从量子Fisher信息的多粒子纠缠判据的角度来看, 它大约得到了6个离子的纠缠态. 有意思的是, 随后实验小组利用Bell 测量判据给出了新的判断, 表明他们也只得到了与我们结果相同的6离子纠缠态[108 ] . 利用(52 )式可以看到, $ N $ 粒子量子纠缠态的量子Fisher信息识别, 对测量值的对比度也有要求, 即$ W $ 态), 不能利用线性操作下的量子Fisher信息进行识别[5 ] .2.3.多原子量子纠缠态的制备 -->2.3.多原子量子纠缠态的制备 如前所述, 多粒子量子纠缠态是进一步提高量子测量精度, 甚至是关乎所有量子新技术的关键. 因此, 如何有效地产生多粒子量子纠缠态是目前量子物理中的一个关键问题和技术. 由于粒子之间的纠缠, 本质上是粒子的量子态(某种意义上是标记量子态的自由度的量子数, 或者好量子数的某种纠缠, 亦或可理解为是一些自由度之间的纠缠)之间的纠缠, 因此, 控制粒子的量子态(或自由度)之间的相互作用是有效产生多粒子量子纠缠态的核心要素. 光学晶体中的光学非线性相互作用, 即自发参量下转换(spontaneous parametric down-conversion, SPDC)方法, 是实现纠缠光子对(实现对偏振或模式的控制)以及压缩光场的重要手段, 其中光子双数态以及连续变量的压缩光都是已经被证明的、有利于量子计量的量子纠缠资源. 图2 表明冷原子物理必将是一种在量子计量及量子信息中起重要作用的新量子资源(作为与光子完全不一样的量子体系正在引起人们的注意: 1)静止质量; 2)与外环境隔离比较彻底; 3)可控的自由度高; 4)已经在一些重要的测量方面取得相当大的成绩, 如时间标准、重力测量等). 超冷原子体系中可控的原子间弹性碰撞相互作用、囚禁外势是在其内态或是空间模式间产生量子纠缠的重要手段[5 ] , 比如: 玻色约瑟夫森结的纠缠基态[20 ] 以及非自旋压缩的量子纠缠态[13 ] 等; 超冷原子体系中的自旋相互作用是产生超冷原子对或是大量原子之间量子纠缠的重要手段(原子的双数态[9 ,109 ] 和自旋压缩态[17 ,19 ] 等); 原子与光场的相互作用也可产生非定域原子之间的量子纠缠关联; 利用里德堡原子偶极-偶极相互作用产生异核原子量子纠缠[110 ] 等. 另外, 在离子体系中, 静电相互作用和离子与光场的相互作用也是目前多离子体系产生多粒子量子纠缠态的有效方法[92 ] , 相关的综述可见文献[111 -115 ].$S = 1$ 的超冷自旋原子气体为例, 相应的哈密顿量[116 ,117 ] 可写为66 )式中忽略了磁守恒(即假设$\hat{N}_{+1} +$ $\hat{N}_{-1} = 0$ )和与总粒子相关的部分. 这里定义$q = ({\text{δ}} E_1+{\text{δ}} E_{-1})/2$ 为有效二阶塞曼能(quadratic Zeeman), 与磁场强度的平方成正比, 可通过磁场强度(或近共振微波缀饰)来调节, $\lambda$ 表示自旋作用允许的$ \rm s $ 波碰撞相互作用能(详见文献 5 ]). 研究发现, (66 )式描述的系统基态由二阶塞曼能和自旋依赖的二体碰撞相互作用能的竞争决定. 在反铁磁条件$(\lambda < 0)$ 下, 存在两个不同的、序参量可用$\hat{N}_0$ 来表示的量子相: 当$q > 4N|\lambda|$ 时, 系统的基态为$|0\rangle_{-1}|N\rangle_0 |0\rangle_{+1}$ (此时, $N_0 = N$ , 原子全部布居在$m_{\rm f} = 0$ 的能级上, 处于极化相(polar phase)); 当$q < 4N|\lambda|$ 时, 系统的基态为$|N/2\rangle_{-1}|0\rangle_0 |N/2\rangle_{+1}$ (此时, $N_0 = 0$ , 原子平均布居在$m_{\rm f} = \pm 1$ 的能级上, 处于破缺反对称相(broken asymmetry phase)). 换而言之, 极化相时, 系统处在纯的Fock态, 而破缺反对称相时, 系统处在原子的双数态上[116 ] . Zou等[9 ] 第一次实验证明了虽然存在一定原子损失和绝热调节参数上的困难, 但上述相变过程可以用来制备多原子数的双数态, 如图7 所示. 实验上第一次利用该相变过程, 实现了$s = \pm 1$ 上约$96\% \pm 2 \% $ 的高转化率、高相干性、高纠缠深度(约910个原中有超过450个原子处于纠缠)和$ {\text{ζ}}_N^2 =$ $ -10.7\;{\rm dB}$ 的双数态的制备. 在随后的实验[9 ] 中, 他们绝热制备了$s = 0$ 的原子Dicke态, 同时利用它对Rabi 转动进行了测量, 得到了$2.42\;{\rm dB}$ 的测量结果,超过标准量子极限, 详细介绍见文献[118 ]. 受这些工作的启发, 人们发现了第二个时间较短的、可用来产生突破海森伯极限的量子纠缠态制备方法[119 ] . 利用超冷原子的自旋特性, 通过对其相变过程量子Fisher信息的分析, 给出一种新的、确定性的多原子纠缠态的制备方案[120 ] .图 7 (a) 量子相变产生双数态过程; (b) 纠缠宽度分析表明双数态纠缠宽度约为$910_{-450}^{+9900}$ 原子. 图取自文献[109 ]Figure7. (a) Generation of twin-Fock state by quantum phase transition; (b) analysis of entanglement breadth for the Twin-Fock state samples, and it shows the entanglement breadth is at least $910_{-450}^{+9900}$ atoms. Adapted from Ref. [109 ].[5 ] . Bell 不等式是甄别粒子间关联特性的重要判据, 不满足其要求的量子态之间的关联被称为最强量子关联[121 ] . 量子体系中这种非定域的关联特性是发展量子信息和量子计量等量子新技术的核心要素. 相同自由度之间的量子纠缠或者非定域特性是一个被研究了很长时间的问题, 特别是在光子体系中取得了非常大的进步. 近年来, 由于不同自由度之间的量子纠缠(非定域)特性在量子信息等领域中的重要作用, 比如增加通讯的容量或增强量子通讯能力等, 引起了人们的广泛注意[122 ] . 有意思的是, 寻求不同自由度之间的相互作用不仅是量子计量, 而且也是凝聚态物理中的重要课题. 这在一定程度上促进了超冷原子体系中的另一个研究热点, 人造量子规范势相关问题的量子模拟[123 ,124 ] . 因此, 产生不同自由度量子态的量子纠缠的关键是要寻找连续自由度(动量)和分离自由度(自旋)之间的相互作用.$|i, {{P}} \rangle$ 表明粒子的量子态需用两种不同自由度来标记, 且$|\alpha|^2+|\beta|^2 = 1$ . $|i\rangle$ 与${P}$ 分别表示分离自由度自旋(这里$i = \uparrow$ 或 $\downarrow$ )和连续自由度动量. 事实上, 上述相互作用在光学、原子和离子的体系中并不难找到[122 ] . 利用光与原子相互作用中双光子拉曼过程, 我们建议在原子系统中, 实现上述过程(值得一提的是, 超冷原子体系中的人造规范势也可以利用相同的原理产生. 另一方面, 利用复合的光学器件, 也可以实现光子不同偏振与传播方向的耦合), 进而实现不同自由度的双原子非定域关联, 如图8 所示. 从量子力学角度看, (67 )式定义了一个类似分光镜一样的光学器件. 利用这个器件, 并结合Yurke早年提出的在两个事先没有任何关联的粒子间产生非定域量子关联的方法, 我们提出了一种可以有效实现两个原子之间非定域关联的实验方案[122 ] . 由于相互作用耦合的可控性, 某种意义上讲, 这个方案也是对Yurke方案在更广泛意义上的一个推广, 对在实物粒子中开展量子非定域的研究有重要意义.图 8 两空间分离的粒子的相同自由度(a)和不同自由度(b)之间的非定域关联(Bell关联); (c)产生和验证自由度间非定域关联的实验方案. Alice 和 Bob 各自制备自旋态为 $\left\vert\downarrow\right\rangle$ 的原子并使其通过混合分束器. 分束器的两个输出分别与本地和对方的分析仪器相连. 第二个混合分束器作为各自的分析仪器的一部分, 将所得信号组合, 在两个粒子的不同自由度中产生了非定域关联. 通过CHSH不等式来区别, 此时两探测器的信号同时响应. 图取自文献[122 ]Figure8. (a) Hypernonlocality represents the simultaneous presence of Bell correlations among more than one DOF of two spatially separated particles; (b) hybrid nonlocality identifies Bell correlations among the discrete DOF of one particle and the continuous DOF of another distant particle; (c)experimental scheme for the generation and verification of inter-DOF entanglement. Alice and Bob both prepare one particle in a spin-$\left\vert\downarrow\right\rangle$ state and submit it to a hybrid beam splitter. One of the output ports is sent to their local laboratory while the other is send to the opposite party. By mixing the local and the received copy using a second hybrid beam splitter, the desired correlations are established. Both parties now measure either spin or external d.o.f of their received particles, as depicted by the interchangeable measurement devices (white boxes). The recorded data from the events in which both parties receive exactly one particle violate a suitable CHSH inequality, independently of the measured DOF Adapted from Ref. [122 ].3.量子增强的原子干涉仪 即使不考虑多原子体系中的量子纠缠特性, 利用超冷原子体系作为量子计量的载体, 就已经充分利用了它的一个基本量子属性——全同性. 因此一定意义上实现了具有量子增强的量子计量: 由于全同的超冷原子体系本身就是一个非常难得的、与参数测量要求完全相同的多粒子统计初态[49 ] . 利用其完成一次测量所获得测量精度的提高与系统中原子数的根号成正比(频率或时间测量中利用光格子将原子分开, 亦是相同的道理). 这也是利用超冷原子气体的原子干涉仪进行重力、微磁场以及时间频标或者原子钟等进行计量研究的一个原因. 无论在光子还是原子体系中, 对精密测量而言, 干涉仪都是一个非常重要的工作框架. 因此, 本小节将简要回顾有关SU(2)干涉仪的工作原理, 再对我们建议的多模式原子干涉进行简要介绍.3.1.SU(2)干涉仪 3.1.SU(2)干涉仪 讨论利用由$ N $ 个二能级粒子(原子)组成的探测初态, 实现对微小相位$\theta$ 进行估计的问题. 本节将讨论利用(32 )式定义的幺正变换, 将参量$\theta$ 耦合到探测态的过程. 形象地讲, 这个过程可以理解为将初始量子态在Bloch球上绕给定方向${n}$ 进行一个$\theta$ 角的转动$\hat{J}_{{n}} = \sum_{i = 1}^{N} \hat{ {\sigma}}^{(i)}_{{n}}/2 $ 为集体(collective)线性转动算符, $\hat{ {\sigma}}^{(i)}_{{n}}$ 是第$ i $ 个原子的泡利矩阵. 干涉仪对于探测初态的作用可以等价为对赝(集体)自旋算符$\hat{{J}}\equiv \left(\hat{j}_x,\hat{j}_y,\hat{j}_z \right)$ 沿给定方向${n}$ 在Bloch球上转动$\theta$ 角. 这个角度$\theta$ 就是要进行估计的参量, 通常与待测物理参数有确定的函数关系. 如文献[4 ]中证明的, 利用(68 )式, 可以将大多数在冷原子物理中无损耗的线性双模干涉仪, 包括Ramsey 型、麦克尔逊以及常用的MZ干涉仪(是重力、时间频率以及引力波测量的工作原理)等, 理解为在一个抽象的三维空间中, 对具有角动量特征的态矢量进行的转动操作[125 ] .${M}$ 可一般地表示为$0\leq \vartheta \leq {\text{π}}$ , $0\leq \phi_{\rm r}, \phi_{\rm t} \leq 2 {\text{π}}$ . 这样的SU(2)干涉仪可通过引入变换(一个非常通用的变换, 在许多领域中都有类似的应用, 本身对Bose子或Fermi子没有特别要求)${J}$ 对应起来. 不难证明, 由(71 )式定义的算符${J}$ 满足与角动量算符相同的对易关系$[\hat{J}_k,\hat{J}_l] =$ $ {\rm i} \varepsilon_{k,l,m}\hat{J}_m$ , 因此可以视为赝角动量算符, 其中$\hat{J}_z$ 具有明显的物理意义, 表示两个端口的粒子数差. 自旋的大小由系统的总粒子数来决定, $\hat{N} = \hat{a}^{\dagger}\hat{a} + \hat{b}^{\dagger}\hat{b}$ , 对应于Bloch球的半径. 与SU(2)和SO(3)群表示一样, 算符$\hat{J}_{x,y,z}$ 表示沿三个转轴方向的转动生成元. 由于干涉仪是无损的, 因此角动量算符的顶点就在空间中画出一个球(Bloch球). 因此, 一般的SU(2)干涉仪的操作可以用类似自旋(角动量)转动形式写为$\theta$ 与(70 )式中的$\vartheta$ , $\phi_{\rm r}$ 和$\phi_{\rm t}$ 存在某种函数关系. (72 )式是双模干涉仪在海森伯表象下的表示形式. 在薛定谔表象下, 可以等价地表示为图 9 广义Bloch球上马赫-曾德干涉仪和拉姆齐干涉仪对集体自旋的操作. 图取自文献[5 ]Figure9. Representation of Mach-Zehnder and Ramsey interferometer operations as rotations of the collective spin on the generalized Bloch sphere. Adapted from Ref. [5 ].69 )式来表示. 其对称矩阵(70 )式中的两个角度分别为$\phi_{\rm r} = 0$ , $\phi_{\rm t} = -{\text{π}}/2$ ,$ 50-50$ 的分束器而言, 可令(74 )式中的$\theta = \pm {\text{π}}/2$ , 相应的变换矩阵可以写为$ x $ 轴作$\theta$ 角的转动操作, 即$\hat{U}_{\rm{BS}} = {\rm e}^{-{\rm i} \theta \hat{J}_x}$ .$50-50$ 的对称分束器, 一个相位$\theta$ 累积过程再经过一个$50-50$ 的对称分束器就组成了一个标准的MZ干涉仪. 由(69 )式可以写出它所对应的操作矩阵${M}$ :77 )式表示绕$ y $ 轴作$\theta$ 角的转动操作. 不难证明(76 )式可以等价地理解为下面的连续转动操作75 )式. 进而, 如果将$50-50$ 分束器与Ramsey干涉仪中的${\text{π}}/2$ 脉冲光等价, 易知Ramsey干涉仪也可以用(77 )式同样的操作来表示, 也就是说Ramesy干涉仪与MZ干涉仪在SU(2)的表示下, 具有相同的数学结构. 需要提醒的是, Ramesy干涉仪的双模一般为原子的两个内态, 而MZ干涉仪的双模通常为两个可空间分开的空间运动模式[4 ] .3.2.原子干涉仪 -->3.2.原子干涉仪 相较于光学、电子以及中子干涉仪, 原子干涉仪具有原子种类多, 光学散射截面大, 对电、磁环境灵敏度高和易于测量等特点. 从上世纪70年代开始, 在对原子的波动特性和其质心运动的相干控制有了一定积累之后, 对原子干涉仪[22 ] 的相关研究取得了长足的进步. 目前原子干涉仪已经成为基础量子理论、精密测量以及原子分子物理研究中的重要手段[22 ,126 ] . 原子干涉仪的实验实现一定意义上展现了人们对原子波动性相干操控的能力. 关于它的相关研究和综述很多, 有兴趣的读者请参考文献[22 ,126 ,127 ]. 本文扼要介绍其工作原理以及一些主要进展.[22 ,126 ] .[22 ] . 近年来, 光与原子相互作用成为原子相干分束的主要手段, 下面对其中的两类相互作用进行简单介绍: Raman-Nath近似的光格子作用和速度选择的受激拉曼跃迁作用. 在原子束与光场的相互作用中观察到原子的衍射现象[128 ,129 ] 以后, 原子与光的相互作用才被认为是一种相干原子分束的有效手段[22 ] , 即光格子对原子束也可起到光学镜片对光一样的作用. 一个两能级原子与光场的相互作用的有效势函数可以写为${\varDelta}= \omega_{\rm{laser}}-\omega_{\rm{atom}}$ 是光场与原子的失谐量, ${\varOmega}_1$ 为拉比频率, 由光场强度与原子的偶极常数决定, ${\varGamma}$ 是原子衰减率, $I({x})$ 是光场的强度分布. 一般地, 依据光场与原子失谐情况, 对原子的相互作用分为三种: 共振光场, 相对于原子来说 贡献吸收结构; 大失谐光场提供一个真实的势函数分布, 单纯起相位控制的作用; 近共振光场兼有这两种作用. 目前, 最典型的光场是两束对打激光形成的驻波光场. 由于其与电子所处的周期外势相似, 也被称为光格子势, 其空间倒格失量为${G} = {k}_1-{k}_2$ , ${k}_{1,2}$ 为形成驻波场的两束激光的波矢量. 根据不同的光场参数, 光学格子也有许多不同的分类, 本文所关心的典型相互作用见图10 . 如果原子束与光场远失谐, 并且满足Raman-Nath条件, 即相互作用时间$\tau$ 较短($\tau <1/2\sqrt{{\varOmega}_{\rm R} E_G/\hbar}$ , ${\varOmega}_{\rm R} = \sqrt{|{\varOmega}_1|^2+\varDelta^2}$ 和$E_G = \hbar^2G^2/2m = 4\hbar \omega_{\rm {rec}}$ ), 此时光场只起一个薄的相位光栅作用, 光栅的参数为$d = \lambda_{\rm{ph}}/2$ , 该作用也被称为Kapitza-Dirac (KD) 衍射. 此相互作用下, 原子束被重新分布到不同的动量态$n\hbar {\bf{Q}} $ , 分布概率为$J_n^2({\varOmega}_1^2 \tau/2\varDelta)$ , 其中$J_n$ 为$ N $ 阶贝塞尔函数. 当光场与原子能级共振时, 原子会吸收或者放出光子, 同时伴随着与光场的动量交换过程. 根据动量守恒, 原子吸收(放出)一个光子时, 其动量改变量为$\delta {{p}} = - (+) \hbar {k}$ , 称之为光场的反冲动量. 利用这样一束光去激发原子时, 就将原子的内态与其动量态相干耦合在一起, 实际上就实现了(67 )式定义的过程. 对于两个长寿命的原子内态来讲, 这样的激发过程就是一个双光子的拉曼过程.图 10 无量纲参数下的原子衍射图: KD衍射和Bragg衍射所满足的条件. 图取自文献[22 ]Figure10. Dimensionless parameter space for atom diffraction, KD labels curves corresponding to conditions that maximize Kapitza-Dirac diffraction, and Bragg indicates curves that correspond to conditions for Bragg reflection. Adapted from Ref. [22 ].[44 ,126 ,130 ] . 如图11 所示, 简单地说, 利用第一束${\text{π}}/2$ 拉曼光, 将处于$|1,{{p}}\rangle$ 的初态原子平均分束为$|1,{{p}}\rangle$ 和$|2,{{p}}+$ $ \hbar {k}\rangle $ ; 经过$ T $ 时间的自由飞行, 再利用一个${\text{π}}$ 脉冲将两个内态上的原子进行交换, 即$|1,{{p}}\rangle \rightleftarrows |2,{{p}} +\hbar {{k}} \rangle $ ; 再经过相同的自由飞行时间$ T $ , 两原子团将回到相同的地方, 再进行另一个${\text{π}}/2$ 拉曼光作用, 即完成了该原子干涉仪的基本过程. 上述相同的自由飞行时间$ T $ 可以在原子喷泉中得到保证. 利用原子干涉仪还可以实现微观粒子弱等效原理检验[131 -138 ] .图 11 (a) 马赫-曾德原子干涉仪示意图; (b) 重力计原理示意图. 图取自文献[139 ]Figure11. (a) Schematic plot of Mach-Zehnder atom interferomery; (b) schematic plot of Gravimeter configuration. Adapted from Ref. [139 ].3.3.多模式原子干涉仪 -->3.3.多模式原子干涉仪 为了进一步提高原子干涉仪的测量精度, 除将量子初态制备为量子纠缠态之外, 还可以考虑一些其他的量子效应, 达到提高量子测量精度的目的. 但是, 这种精度的增加, 仍然受到标准量子极限的限制, 而远未达到海森伯极限的量级. 本小节将介绍利用Kaptiza-Dirac(KD)方法对原子进行相干分束操作, 同时介绍利用谐振子运动的特性而发展的一种新的多模式原子干涉仪[140 ] .58 )式表明, 增加统计独立的测量次数$ m $ 或者增加参与测量初态的粒子数$ N $ 均可以有效地提高测量的精度. 在光学干涉仪中, 还可以通过提高入射激光的功率来提高测量精度(已经在LIGO的引力波测量中被提及, 当然也特别采用了非经典光来提高测量精度), 因为激光功率增加相当于输入了更多的光子. 相较于提高光子数目, 在实验中增加原子初态的原子数目就没那么容易了. 有别于输入非经典态或量子纠缠态, 利用多模式或是多通道干涉仪的方法来提高测量精度也逐步引起人们的注意[141 ,142 ] . 在光学干涉仪中, 通过多模式的分束器、或是多路的干涉光源, 已经发现类似$1/M$ 的测量精度的提高, 其中$ M $ 是模式或者光源的数目[142 ] . 这样的测量精度的提高虽与突破散粒噪声极限无关, 但是由于比多原子量子纠缠态稳定、易操作, 还是受到人们的关注[49 ] . 利用光格子囚禁的超冷原子气体, 也被建议用来实现$ M $ 模式的原子干涉仪[143 ] , 此时$ M $ 为囚禁冷原子的光格子的数目. 处在不同格点位置的原子, 自然成为探测不同点重力参数$ g $ 的探针, 计算表明其测量的精度可以达到${\text{Δ}}g \propto 1/ (\sqrt{m N} \times (M-1))$ .图11 所示. 在原子喷泉实验[144 ] 中, 要保证更多的原子处于完全相同的动量初态, 原则上也需要更低的实验温度. 相对较长的作用时间也在一定程度上增加了原子量子相干性保持的难度. 特别是原子的扩散过程, 会造成有效原子数目的减少. 综合考虑上述原因, 我们在2014年建议了一种新的多模式原子干涉仪的实验方案, 特别考虑了KD光与原子相互作用的特性以及在谐振势中粒子运动的特点. 如图12 所示, 利用谐振势中粒子运动的周期性, 可以有效减少由于光脉冲相互作用导致的光子数损失.图 12 (a) 多模式KD 干涉仪. $t=0$ 时, 第一束KD脉冲将谐振势中原子复制多个原子波包. $t=\pi/\omega$ 时, 第二束KD脉冲对这些波包进行复合, 并在$t=3\pi/2\omega$ 时进行检测; (b) 测量时刻不同温度下原子的密度分布. 图取自文献[140 ]Figure12. (a) Multimodes Kapitza-Dirac interferometer. The first Kapitza-Dirac pulse at $t=0$ creates several modes consisting of atomic wave packets evolving under the harmonic confinement and an external perturbing field. The second Kapitza-Dirac pulse at $t=\pi/\omega$ mixes the modes which are eventually detected in output at $t=3\pi/2\omega$ ; (b) density profiles of the output wave function at temperatures below (dark line), equal (blue line), or above (red line) the crossover temperature $T_0$ . Adapted from Ref. [140 ].$\theta$ ); IV)在时刻${\text{π}}/\omega$ ($\omega$ 为谐振子势阱的囚禁频率), 加另一束KD 光相干叠加不同路径的原子; V)在$3 {\text{π}}/2 \omega$ 测量, 处于不同动量态的原子数的测量. 由于初始原子之间并无相互作用, 该动力学过程可以精确求解. 利用量子Fisher信息的计算, 可以得到对于相位$\theta$ 的估计精度[145 ] 为$ V $ 是KD脉冲的强度, $ M $ 为KD脉冲下原子分布的有效模式数. 具体考虑将该干涉仪用于对重力参数的测量, 此时相邻路径上的相位差正比于重力参数, (79 )式可以写为$\lambda$ 为KD脉冲光的波长.$\sigma_0/\lambda \gg 1$ , 也即初始原子波包比光格子大很多. 这样, 原子被测量的时候波包是可以完全分开的, 同时, 也保证了足够大的空间对足够多的波包进行测量; 另一方面, 所能获得的测量精度原则上在较大范围内与温度无关. 如果原子初始波包比光格子的尺寸大, 即$\lambda_{dB}/\lambda \gg 1$ , 原则上给出一个有效的温度上限. 考虑当前的实验条件, $\omega = 2{\text{π}}\times 5$ Hz, KD光脉冲$\lambda = 532 \times 10^{-9}$ m, 反冲能量约为$5.33 \times 10^{-30}$ 焦耳, KD作用时间控制在 $2 \times 10^{-6}$ s, 考虑$10^5$ 个$^{88}{\rm {Sr}}$ 原子, 对重力参数的测量可以达到约为$10^{-9}$ 的相对误差[145 ] . 较利用Bloch振荡取得的实验结果$10^{-7}$ [146 ] 精度更高.3.4.非局域相互作用的原子干涉仪 -->3.4.非局域相互作用的原子干涉仪 1) 非局域相互作用.?通常情况下原子干涉仪与待测物理量之间的耦合相互作用都是局域的, 或者与粒子数成正比, 是线性关系, 可用幺正变换(68 )式来表示. 但在一些特定情况下, 粒子间的非线性或非局域相互作用也起重要的作用, 此时, 相位测量精度与探测态中粒子数$ N $ 之间的关系, 与这些非线性相互作用的大小与形式均相关, 可以满足不同于$1 /N^{\alpha}$ 的关系, 其中$\alpha = 1/2$ (SQL)或是1(HL)[147 -153 ] . 需要指出的是, 尽管非线性或非局域相互作用可以导致测量精度与粒子之间新的幂次关系, 但仍然满足标准量子极限和海森伯极限(参见文献[5 ]及其参考文献)(本质上讲, 由于这些非线性或非局域相互作用也是产生纠缠或增加Fisher信息的主要原因, 因此, 我们认为在累积相位的过程中也增加了测量初态的量子Fisher信息或量子纠缠; 另外, 线性相互作用不会造成量子Fihser信息的增加或量子纠缠).$ N $ 个自旋$1/2$ 的超冷原子组成的系统, 可用处于一维光晶格中的二能级原子来实现[154 ] . 一般情况下, 系统的哈密顿量$\hat{H}$ 可以表示为$\hat{H}_0$ 是格点(或是局域)操作, ${ {\sigma}} _{{m}}^{(i)}$ 表示第$ i $ 个原子的Pauli矩阵, ${m,n}$ 为Bloch球上的单位方向矢量, $\alpha _{i}$ ($0\leqslant \alpha _{i}\leqslant 1$ , $i = 1,2,3,\cdots,N$ )为同一晶格中原子的格点能. 第二项$\hat{H}_{\rm{int}}$ 表示不同晶格中原子之间的(非局域)相互作用, $V_{ij} = V_{ji}$ 为相互作用强度. 如果只考虑近邻相互作用, (81 )式就是通常的Ising模型; 如果考虑长程均匀相互作用, 则为更为一般的Lipkin-Meshkov-Glick (LMG)模型.68 )式中的线性操作$\hat{H}$ 换为(81 )式, 就得到了所谓非线性(非局域)原子干涉仪. 该干涉仪的相位测量精度, 可通过对(81 )式的量子Fisher信息分析得到. 纯态情况下, 系统的量子Fisher信息为$F_{\rm Q}[| \psi _{\rm{sep}}\rangle,\hat{H}] = 4{\text{Δ}}\hat{H}^2$ [84 ] , 即$f_{0,1}$ 分别为局域哈密顿$\hat{H}_0$ 和非局域哈密顿$\hat{H}_1$ 的量子Fisher信息,$f_{2}$ 为它们的协同(convariant)量子Fisher信息(产生原因为两种不同的相互作用, 这里即$\hat{H}_{0,1}$ . 特别是由这两种相互作用之间的不对易导致. 类似的式子也在多变量估计等问题中出现)$\alpha_i = 1$ , $\forall i$ , 这种情况对应于线性原子干涉仪(68 )式. 同时, 将格点相互作用强度并入到相位$\theta$ 中, 此时非局域相互作用的贡献实际上由其与线性或是局域相互作用量的比值$\gamma$ 决定.$V_{ij} =$ $\gamma (\delta_{j,i+1}+\delta _{j,i-1})/2$ 和${{n}}\cdot {{m}} = 1$ . 考虑量子Fisher信息的定义, 使 (82 )式取最大值的、可分的量子纯态可写成[84 ] $\left\vert \uparrow, \downarrow \right\rangle$ 是格点自旋$\sigma _{{n}}$ 的本征矢; $\varphi _{i}$ 是不同本征态的任意相对相位. 通过数值计算, 可以发现不同格点上自旋平均值$\langle\sigma _{{n}}^{(i)}\rangle$ 随$\gamma$ 变化的关系, 如图13(a) 所示. 不难看出: 当近邻相互作用强度$\gamma$ 小于某个临界参数$\gamma_{\rm c} = 0.7302$ 时, 不同格点自旋取相同的常数. 特别是当$\gamma\ll1$ 时, 如图13(b) 所示, 量子Fisher信息$F_{\rm Q}[| \psi _{\rm{sep}}\rangle,\hat{H}] \approx N\big(1+\dfrac{5}{4}\gamma^2+O(\gamma^4)\big)$ . 当$\gamma$ 大于临界值$\gamma_{\rm c} = 0.7302$ 时, 系统呈现反铁磁序, 不同格点的自旋平均值依次取$1,0,1,0,1,0,\cdots$ , 如图13(a) 所示. 图13 的计算中, 选取$N = 20$ . 当$\gamma \gg \gamma_{\rm c}$ 时, 其量子Fisher信息为$F_{\rm Q}[| \psi _{\rm{sep}}\rangle,\hat{H}] =$ $ N\big(\dfrac{1}{2}+\gamma+\dfrac{1}{2}\gamma^2)$ , 即图13(b) 中右边的蓝线. 有意思的是, 如果分别对(83 )式–(85 )式进行最大化, 可以得到图13(b) 中红色的虚线. 显然, 量子Fisher信息的上限为图 13 (a) 在Ising模型中, 平均自旋$\langle {\sigma}_{{n}}^{(i)}\rangle$ 随$\gamma$ 的变化情况; (b) $F_{\rm Q}/N$ 随$\gamma$ 的变化情况, 以及标准量子极限和亚散粒噪声极限的边界, 同时其也是判定有用量子纠缠态的边界[84 ]. 灰色区域为亚散粒噪声区域. 图取自文献[84 ]Figure13. we show the $\langle {\sigma} _{{n}}^{(i)}\rangle$ with respect to $\gamma$ ; (b) $F_{\rm Q}/N$ with respect to the $\gamma$ and give the boundary between standard quantum limit and sub-shot noise, which also witnesses the useful entanglement in Ref. [84 ]. The gray region denotes the sub-shot noise region. Adapted from Ref. [84 ].图13 及(87 )式表明: 近邻相互作用下, 量子Fisher信息随相互作用强度的变化呈单调关系. 尽管在$\gamma >\gamma_{\rm c}$ 时呈现非线性关系, 但是, 仍可作为判断多粒子量子纠缠的判据, 详细可参见文献[84 ]. 同时考虑(87 )式以及CRB(15 )式可以知道, 相位测量精度将依赖于非局域相互作用强度$\gamma$ , 即$({\text{Δ}}\theta)_{\rm{CR}}^2 \approx 1/ (\gamma^2 N ).$ .81 )式中的任意两个格点之间存在相等的非局域相互作用, 即$V_{ij} = \gamma$ , 同时${{n}}\cdot {{m}} = 1$ . 该模型最早在核物理研究中提出[155 -157 ] , 近些年在量子纠缠[158 -160 ] 、自旋压缩[113 ,161 ] 以及量子计量方面[162 ] 都有较为广泛的应用. 与Ising情况不同, 对于任意给定的耦合强度$\gamma$ , 不同格点上的自旋平均值相等, 即$\langle\sigma _{{n}}^{(i)}\rangle = a$ (图14(a) ), 使(82 )式最大. 也就是说, 系统的量子Fisher信息(82 )式可以写为[84 ] 图 14 (a) 在LMG模型中, 平均自旋$\langle {\sigma}_{{n}}^{(i)}\rangle$ 随$\gamma$ 的变化情况; (b) $F_Q/N$ 随$\gamma$ 的变化情况, 以及标准量子极限和亚散粒噪声极限的边界, 同时其也是判定有用量子纠缠态的边界[84 ]. 图取自文献[84 ]Figure14. (a) We show the $\langle \rm {\sigma} _{{n}}^{(i)}\rangle$ with respect to $\gamma$ in LMG model; (b) $F_{\rm Q}/N$ with respect to the $\gamma$ and give the boundary between standard quantum limit and sub-shot noise, which also witnesses the useful entanglement in Ref. [84 ]. The gray region denotes the sub-shot noise region. Adapted from Ref. [84 ].$\tilde{\gamma} = \gamma(N-1)$ . 这样, 系统的量子Fisher信息值可以通过对$ a $ 的最优化得到. 考虑非局域相互作用很小, 即$\tilde{\gamma} \ll 1$ 时, 只保留一阶项, 有$a = \tilde{\gamma} + O(\tilde{\gamma}^2)$ . 此时, 量子Fisher信息为$\tilde{\gamma} \gg 1$ , 忽略零阶项, 有$a = \sqrt{\dfrac{N-2}{2N-3}}$ . 此时,图14(b) 蓝色实线为(89 )式和(90 )式给出的量子Fisher信息与非局域相互强度$\tilde{\gamma}$ 的关系. 此时, 系统的量子Fisher信息也存在上限82 )式中各项分别最大化得到, 如图14(b) 中红色的虚线表示. 显然, 在给定非局域相互作用以及原子数的条件下, LMG型原子干涉仪可以进一步提高相位测量的精度, 因为$F_{\rm Q} \approx N \tilde{\gamma}^2$ . 利用这种量子Fisher信息与粒子数的单调关系可以区分不同多粒子量子纠缠态的纠缠特性[84 ] .4.量子计量中的统计方法 相位估计是量子计量, 甚至是量子精密测量中的核心环节之一, 也是经典统计推断(statistical inference)中的一个重要分支. 如果待测参数在测量过程中不随时间变化, 这类参数估计问题为静态参数估计问题[163 ] , 比如重力、引力常数等; 当然还存在测量过程中变化的参数估计, 此类问题不在本文讨论的范围(典型的问题应为时间频率标准中的估计, 此类问题被称为warm-function估计). 对于第一类问题, 即待测参数在测量过程中为常数, 通常有两类不同的估计方法: 一种称为贝叶斯(Bayesian)估计, 另一类称为频率(frequentist)论估计或Fisher估计, 也被称为非贝叶斯估计. 由于两种估计方法处理数据的出发点完全不同, 因此, 不同的方法可能导致不同的结论甚至悖论式的结论. 相位估计所处理的数据都具有随机数的特性, 它的主要任务是要从这些具有随机特性的实验数据中, 将所关心的待测物理量高精度地估计出来. 一般将测量数据的随机性归结为噪声(noise). 有两类完全不同的噪声: 一类为经典噪声; 另一类为量子噪声. 其中第一类噪声是固有的, 由仪器或操作的不完善造成, 是可以压缩到零的; 而第二类噪声是本质的, 由量子力学原理所决定, 是不可克服的[164 ] .4.1.频率论估计 4.1.频率论估计 1) 频率论观点.?频率论观点认为待估计参数$\theta_0$ 本身是固定的未知参数[163 ] . 待测相位是通过对估计子(estimator)$\theta_{\rm {est}}(\mu)$ 的统计平均求得的. 如果统计分布数据是通过最大似然估计的方法获得, 则简单地选用该分布函数的极大值对应的参数值作为估计值, 即$\theta_{\rm {est}}(\mu)$ 为使似然函数为极值的相位角(如(105 )式所示). 故而, 该相位值本身也具有随机的性质. 随着独立测量次数的增加, 与待测相位对应的测量值出现的几率(概率)为最大, 因此, 相位平均值就会趋向于待测值$\theta_0$ .${{\mu}}$ 的统计涨落反映了估计子的统计不确定程度, 利用其与平均值$\langle \theta_{\rm {est}} \rangle_{{{\mu}}|\theta_0} =\sum_{{{\mu}}}$ $ \theta_{\rm {est}} ({{\mu}}) P({{\mu}}|\theta_0)$ 的方差${{\mu}}$ 进行的. $P({{\mu}}|\theta_0)$ 为给定待测参数时, 进行$ m $ 次独立测量所得到的条件分布函数. 在最大似然条件下, $P({{\mu}}|\theta_0) = \prod_i^m P(\mu_i|\theta_0)$ . 局域无偏差的估计算子[165 ] 是一类在给定待测物理量$\theta_0$ 处满足无偏差估计条件的算子. 此时, 无偏差估计条件为$\langle \theta_{\rm {est}} \rangle_{{{\mu}}|\theta_0} = \theta_0$ 和$\dfrac{{\rm d} \langle \theta_{\rm {est}} \rangle_{{{\mu}}|\theta_0}}{{\rm d} \theta}\vert_{\theta = \theta_0} = 1$ . 当且仅当该算子在所有考虑的相位区间上都是局域无偏差估计时, 我们说该估计为无偏差估计.[166 ] . 注意(93 )式中, 待测量相位值$\theta_0$ 并不事先可知, 因此, 与(92 ) 式比较就有92 )式更具有实验的可操作性. 对于无偏差的估计子而言, (92 )式和(94 )式是等价的. 由于(94 )式中 $\left(\langle\theta_{\rm{est}}\rangle_{{\mu}|\theta_0}-\theta_0\right)^2\geqslant 0$ , 所以有$\rm{MSE}(\theta_{\rm{est}})_{{{\mu}}|\theta_0}\geqslant ({\varDelta}^2\theta_{\rm est})_{{{\mu}} \vert \theta_0}$ . 也就是说, 任何小于方差$(\varDelta^2 \theta_{\rm est})_{{{\mu}} \vert \theta_0}$ 的极值, 必然是均方差$\rm{MSE}(\theta_{\rm{est}})_{{{\mu}}|\theta_0}$ 的极值. 反之, 不一定正确.92 )式的方差存在一个极限, 称为Barankin极限[167 ,168 ] $\mathcal{L}({{\mu}} \vert \theta_i,\theta) = P({{\mu}}|\theta_i)/P({{\mu}}|\theta)$ 称为似然比率. $\rm{sup}$ 表示考虑所有$ N $ 个任意实参数$a_i \in \mathbb{R}$ 以及参数区间内的相位$\theta_i$ 对$\left( \varDelta^2 \theta_{\rm{est}} \right)_{{{\mu}}|\theta_0} $ 取最大值. 不难证明, 无论对于多少次独立测量$ m $ 该极限总是可以达到的(这与CRB完全不同, CRB需要无穷的测量次数, 是中心极限定理的结果). 由于(95 )式中参数数目过多且与估计子相关, 因而实际意义不明显, 但具有非常重要的理论意义. 对于无偏差的估计, 即$\langle \theta_{\rm{est}} \rangle_{{{\mu}} \vert \theta_i} = \theta_i$ ($\forall i$ ), 可把Barankin Bound(BB)(95 )式重写为96 )式与估计子无关. 关于(96 )式的具体推导在附录A3中可以找到.$\varDelta^2 \theta_{\rm CRB}$ 是(9 )式的CRB. 取两个参数$n = 2$ , $a_1 = 1, a_2 = -1$ , $\theta_1 = \theta_0+\lambda$ , $\theta_2 = \theta_0$ , (96 )式可以写为Hammersley–Chapman-Robbins 极限(ChRB)$\varDelta^2 \theta_{\rm ChRB}$ [169 ,170 ] . 可以严格证明, CRB是该情况下取$\lambda \rightarrow 0$ 的极值; 取三个参数$n = 3$ , $a_1 = 1$ , $a_2 = A$ , $a_3 = -1$ , $\theta_1 = \theta_0+\lambda_1$ , $\theta_2 = \theta_0+\lambda_2$ , 和 $\theta_3 = \theta_0$ , 得到extended Hammersley-Chapman-Robbins 极限($\varDelta^2 \theta_{\rm EChRB}$ )[164 ] . 连续不等式(97 )式表明, 随着参数数目的增加, 极限越严格或者越大. 因此, 原则上Barankin极限为频率分析中的最大极限.4.2.贝叶斯估计 -->4.2.贝叶斯估计 1) 贝叶斯观点. 贝叶斯观点认为待估计参数$\theta_0$ 本身是随机且满足确定的统计分布的未知参数[163 ] . 根据贝叶斯-拉普拉斯定理(Bayes-Laplace theorem): 对于任意的随机数$\mu $ 和$\theta $ 满足的联合概率分布函数$P({{\mu}},\theta)$ , 总有 $P({{\mu}},\theta) = P({{\mu}}|\theta)P(\theta) = P(\theta|{{\mu}})p({{\mu}}) = $ $ P(\theta,{{\mu}})$ , 其中$P(\theta)$ 和$P({{\mu}})$ 是边缘分布(marginal distribution), $P({{\mu}}\vert \theta)$ 和$P(\theta \vert {{\mu}})$ 是条件概率. 该定理表明: 两个随机变量${{\mu}}$ 和$\theta$ 在联合概率中是对称的. 边缘分布可以通过联合概率$P({{\mu}},\theta)$ 对${{\mu}}$ 或$\theta$ 的积分得到.$P({{\mu}} \vert \theta_0)$ 就是在给定待测物理量或估计相位$\theta_0$ 下, 得到测量结果$\mu$ 的条件概率分布函数. 由贝叶斯-拉普拉斯定理, 引入一个随机变量$\theta$ , 得到后验概率(posterior probability)$P_{\rm{post}}(\theta|{{\mu}}) $ 是考虑了测量数据${{\mu}}$ 之后, 对$\theta = \theta_0$ 的新条件分布函数. 相应地, (98 )式中的$P_{\rm{pri}}(\theta)$ 叫先验概率分布, 反映了测量之前对待估计相位$\theta$ 已有分布信息的了解程度, $P({{\mu}}|\theta)$ 就是实验测量数据所满足的似然函数$P({{\mu}} \vert \theta_0)$ . 边缘分布通过对后验分布函数归一化得到, $P_{\rm mar}({{\mu}}) = \int_a^b {\rm d} \theta \, P(\theta, {{\mu}})$ , 此处$ a $ 和$ b $ 定义了待测相位的分布区间.$\theta_0$ 一无所知, 那么选取一个合适的先验分布函数并不是一件容易的事情. 也就是说, 并非简单选择一个常数作为分布函数即可, 详细的讨论参见文献[164 ]. 但是, 如果得到(98 )式的后验分布函数, 可以利用找极值的方法得到估计的$\theta_0$ : $\theta_{\rm BL}({{\mu}}) = \rm{arg} \max_{\theta} P_{\rm{post}}(\theta|{{\mu}})$ . 当先验分布为常数时, 此法与最大似然估计相同, 也可以通过对后验分布求平均值$\theta_{\rm BL}({{\mu}}) =\int_{a}^{b} {\rm d}\theta \, \theta$ $ P_{\rm{post}}(\theta|{{\mu}})$ 来获得估计值.99 )式给出了在测量结果为${{\mu}}$ 时, 估计值$\theta_{\rm BL}({{\mu}}) = \theta_0$ 在区间$[a,b]$ 上的可信程度[171 ] . 换句话说, $\left(\varDelta^{2}\theta_{\rm BL}({{\mu}})\right)_{\theta|{{\mu}}}$ 描述了估计值$\theta_{\rm BL}({{\mu}})$ 的统计涨落.[172 ] 证明(99 )式存在下限$f\left( {{\mu}},a,b\right) = b P_{\rm{post}}(b|{{\mu}})-a P_{\rm{post}}(a|{{\mu}})- \theta_{\rm BL}({{\mu}})$ $(P_{\rm{post}}(b|{{\mu}})-P_{\rm{post}}(a|{{\mu}}))$ , 与后验概率在边界处的取值有关. (100 )式所示的极限与具体测量结果${{\mu}}$ 和后验概率Fisher信息$\left(\int_{a}^{b} {\rm d} \theta \, \dfrac{1}{P_{\rm{post}}(\theta|{{\mu}})} \left( \dfrac{{\rm d} P_{\rm{post}}(\theta|{{\mu}} )}{{\rm d} \theta}\right) ^{2}\right)$ 相关. 等式 (100 )成立的充要条件为$\lambda_{{{\mu}}}$ 不依赖于相位$\theta$ , 但可以与测量值${{\mu}}$ 相关.100 )式所示的Ghosh极限与测量值${{\mu}}$ 有关, 自然地, 如果对$(\varDelta^{2}\theta_{\rm BL}({{\mu}}))_{\theta|{{\mu}}}$ 用似然分布函数$p({{\mu}} |\theta_0)$ 求平均, 就可以得到一个与测量值${{\mu}}$ 无关的极限, 这就是似然平均Ghosh极限$P(\theta,{{\mu}}|\theta_0) = P_{\rm post}(\theta|{{\mu}})P({{\mu}}|\theta_0)$ , 所以, (99 )式也可认为是对贝叶斯方差的平均值. 类似地, 对(100 )式用似然分布函数求平均, 就可以得到(99 )式的极限[4 ] 4.3.数值验证 -->4.3.数值验证 1) 最大似然分布函数.?下面采用与离子实验[92 ] 相关的宇称测量结果(51 )说明前两节中提到的各种统计极限. 考虑$ N $ 离子的GHZ纠缠态, $ \vert \rm{GHZ} \rangle =$ $ (|0\rangle^{\otimes N}+|1\rangle^{\otimes N})/\sqrt{2}$ , 作为初态, 再对其进行(68 )式描述的$\theta$ 的转动操作. 对于转动相位$\theta$ , 通过对宇称性($\mu = (-1)^{N_0}$ , $N_0$ 为在$|0\rangle$ 上的粒子数)的测量来估计. 测量值$\mu = \pm1$ 的条件概率函数由(51 )式给出, 因此, 经过$ m $ 次独立测量所得到的似然函数为$m_{\pm}$ 为测量结果为$\pm 1$ 的总数, 显然m =$ m_++m_-$ . 在下面的数值模拟的计算中, 将着重讨论$N = 2$ , $\theta_0 = {\text{π}}/4$ 的情况.104 )式取极大值的值, 即[4 ,166 ,173 ] 告诉我们, 随着独立测量样本数$ m $ 的增加, 最大似然估计值渐进地满足如下高斯分布:106 )式说明$\theta_{\rm{MLE}}({{\mu}})$ 的统计平均值为待测相位$\theta_0$ , 其方差由Fisher信息的倒数决定. 给定待测值$\theta_0 = {\text{π}}/4$ , 利用蒙特卡罗方法获得按(104 )式所示的最大似然分布的测量值序列$\mu_i$ . 最大似然估计值通过$\theta_{\rm{MLE}}({{\mu}}) = \dfrac{1}{2}\arccos (\dfrac{m_+-m_-}{m_++m_-} )$ 获得. 注意该问题的Fisher信息为$F(\theta_0) = N^2$ , 与待测相位$\theta_0$ 无关. 图15(a) 给出了偏差($ \langle \theta_{\rm{MLE}} \rangle_{{{\mu}}|\theta_0} - \theta_0$ )(绿色圆点)随独立测量次数$m$ 的变化关系, 其中误差(红色曲线)由$\pm {\text{Δ}}\theta_{\rm CRB}$ 给出. 当$m$ 足够大时, (106 )式的确描述了最大似然估计值的行为. 同时图15(b) 表明, 随着$ m $ 的增加, 最大似然估计子, 逐渐趋于无偏差估计, 即${\rm d} \langle \theta_{\rm {est}} \rangle_{{{\mu}}|\theta_0}/{\rm d} \theta \vert_{\theta = \theta_0} = 1$ .图 15 (a) 最大似然估计偏差(绿色圆点)随独立测量次数$m$ 的变化, 误差为$(\Delta\theta_{\rm{MLE}})_{{\mu} \vert \theta_0}$ ; 红色曲线为$\pm \Delta \theta_{\rm CRB} = $ $\pm |{\rm d} \langle \theta_{\rm MLE} \rangle_{{\mu} \vert \theta_0} / {\rm d}\theta_0|/\sqrt{mF(\theta_0)}$ ; (b) $ m F(\theta_0) (\varDelta^2\theta_{\rm{MLE}})_{{\mu} \vert \theta_0}$ (空心红圈)随$m$ 的变化. 红色实线为$({\rm d} \langle \theta_{\rm MLE} \rangle_{{\mu} \vert \theta_0} / {\rm d}\theta_0)^2$ . 图取自文献[164 ]Figure15. (a) Bias $\langle \theta_{\rm MLE} \rangle_{{\mu} \vert \theta_0} - \theta_0$ (green dots) as function of $m$ with error bars $(\Delta\theta_{\rm{MLE}})_{{\mu} \vert \theta_0}$ . The red lines are $\pm \Delta \theta_{\rm CRB} = $ $\pm |{\rm d} \langle \theta_{\rm MLE} \rangle_{{\mu} \vert \theta_0} / {\rm d}\theta_0|/\sqrt{mF(\theta_0)}$ ; (b) variance of the maximum likelihood estimator multiplied by the Fisher information, $ m F(\theta_0) (\varDelta^2\theta_{\rm{MLE}})_{{\mu} \vert \theta_0}$ (red circles), as a function of the sample size $m$ . It is compared to the bias $({\rm d} \langle \theta_{\rm MLE} \rangle_{{\mu} \vert \theta_0} / {\rm d}\theta_0)^2$ (red line). We recall that $\theta_0=\pi/4$ and $F(\theta_0)=4$ here. Adapted from Ref. [164 ].$\theta_0$ 满足如下先验分布函数$I_0(\alpha)$ 是第一类修正的贝塞尔函数. 当(107 )式取不同值时, 此先验函数可以表示对$\theta_0$ 的不同了解程度: 从完全无知($\alpha = -100$ )到非常好地了解($\alpha = 10$ ), 见图16 中的小插图. 对未知的$\theta_0$ 的估计采用了$ \theta_{\rm BL} ({{\mu}}) = \int_{a}^{b} {\rm d}\theta \, \theta \, P_{\rm{post}}(\theta|{{\mu}})$ . 图16 中给出了对不同先验概率分布条件下得到的数据进行贝叶斯与频率论分析的结果. 后验方差$(\varDelta^2 \theta_{\rm BL})_{{{\mu}},\theta\vert \theta_0}$ ((99 )式)是蓝色的圆圈, 蓝色的实线是似然平均的Ghosh极限((103 )式). 采用频率方法得到的方差$( \varDelta^{2}\theta_{\rm BL} )_{{{\mu}} \vert \theta_0} \!=\! \sum_{{{\mu}}} \big( \theta_{\rm BL}({{\mu}}) \!-\! \langle \theta_{\rm BL} \rangle_{{{\mu}}|\theta_0} \big)^2 p({{\mu}} \vert \theta_0)$ 用红色的点标记, 与此对应的CRB $ \varDelta^2 \theta_{\rm CRB} = $ $ |{\rm d} \langle \theta_{\rm BL} \rangle_{{{\mu}}|\theta_0} / {\rm d}\theta_0|^2/\big(m F(\theta_0)\big)$ 为红色实线. 此处需要注意的是当先验概率分布越窄时, $( \varDelta^{2}\theta_{\rm BL} )_{{{\mu}} \vert \theta_0}$ 值越小, 与此同时, 待估计值的偏差也变得更大, 即$|{\rm d} \langle \theta_{\rm BL} \rangle_{{{\mu}}|\theta_0} / {\rm d}\theta_0|^2$ 变得更小.图 16 不同先验概率下, 频率论方法得到相位估计值的方差($m (\varDelta^2 \theta_{\rm BL})_{{\mu} \vert \theta_0}$ , 红色圆圈)及其边界CRB($m\varDelta^2 \theta_{\rm CRB}$ , 红色虚线), 和贝叶斯相位估计的方差($m (\Delta^2 \theta_{\rm BL})_{{\mu},\theta \vert \theta_0}$ , 蓝色圆圈)及其边界($m\varDelta^2 \theta_{\rm aGB}$ , 蓝色实线)随样本$m$ 的变化 (a) $\alpha=-100$ ; (b) $\alpha=-10$ ; (c) $\alpha=1$ ; (d) $\alpha=10$ . 每张图中内嵌的图是先验概率$p_{\rm pri}(\theta)$ 的分布图. 图取自文献[164 ]Figure16. Comparisons of phase estimation variance as a function of the sample size for Bayesian and frequentist data analysis under different prior distributions: (a) $\alpha=-100$ ; (b) $\alpha=-10$ ; (c) $\alpha=1$ ; (d) $\alpha=10$ . In all figures, Red circles (frequentist) are $m (\varDelta^2 \theta_{\rm BL})_{{\mu} \vert \theta_0}$ , the red dashed line is the CRB. $m\varDelta^2 \theta_{\rm CRB}$ , Eq. (124 ). Blue circles (Bayesian) are $m (\varDelta^2 \theta_{\rm BL})_{{\mu},\theta \vert \theta_0}$ , the blue solid line is the likelihood-averaged Ghosh bound $m\varDelta^2 \theta_{\rm aGB}$ , Eq. (103 ). The inset in each panel is $p_{\rm pri}(\theta)$ . Adapted from Ref. [164 ].图16 不难看出, 当独立测量次数$ m $ 趋于无穷时, 贝叶斯以及频率论的极限都将趋于0.25(频率论下的CRB). 但是, 当$ m $ 较小时, 贝叶斯的后验方差和其边界($m (\varDelta^2 \theta_{\rm BL})_{{{\mu}},\theta \vert \theta_0}$ 和$m\varDelta^2 \theta_{\rm aGB}$ )会低于频率论的结果, 即图16(a) 和图16(b) . $ m $ 越小, 这种偏差越大. 我们知道CRB是最小的统计极限, 因此, 这些结果显得有些奇怪. 唯一合理的解释是, CRB作为最小的极限只有$ m $ 很大时, 即中心极限定理成立的条件下, 才成立. 当$ m $ 较小时, 两种不同的统计观点可能导致这种偏差. 这也表明, 两种情况下的统计极限没有可比性.$m$ 趋向无穷时的渐近行为,是由Laplace–Bernstein–von Mises定理[4 ,166 ] 保证的. 也就是说, 在$ m $ 很大时, 后验分布函数将趋于如下的高斯分布函数:$1/\big(mF(\theta_0)\big)$ .5.总结与展望 利用超冷原子系统突破标准量子极限是一个充满生机与挑战的多学科交叉研究领域. 在实验方面, 已经完成了若干利用多粒子纠缠态提高测量精度、趋近海森堡极限的验证性实验, 未来的研究可能集中到将其扩展到具体的物理参数测量的系统中. 理论方面, 基于量子Fisher信息的多粒子量子纠缠态判据以及相关的量子计量基本理论仍需进一步发展, 同时也需要关注相关的量子效应, 以提高物理量的测量精度. 由于该领域发展很快, 这里简单介绍一下最近在理论方面的几个进展.[4 ,174 ] . 考虑到Fisher信息与测量物理量测量精度之间的关系((9 )式), Fisher 信息已经被推广到连续变量的纠缠判定[82 ,175 ] . 考虑一个$ N $ 模式的连续变量系统$\hat{\rho}_{{\text{Λ}}} = \sum_{\gamma}p_{\gamma}\hat{\rho}^{(\gamma)}_{\mathcal{A}_1}\otimes\dots\otimes\hat{\rho}^{(\gamma)}_{\mathcal{A}_M}$ , 其中密度矩阵定义在相空间. 相应的算符矢量为$\hat{{r}} =(\hat{r}_1,\dots,\hat{r}_{2N}) = $ $ (\hat{x}_1,\hat{p}_1,\dots,\hat{x}_N,\hat{p}_N)$ . 对于高斯态, 其Fisher信息定义为${ \varOmega}= \bigoplus_{i = 1}^N\left(\begin{smallmatrix} 0 & 1\\-1 & 0 \end{smallmatrix}\right)$ ; 协方差矩阵${ \varOmega}_{\hat{\rho}}$ 的矩阵元为$({ \varOmega}_{\hat{\rho}})_{ij} = \dfrac{1}{2}\langle\hat{r}_{i}\hat{r}_{j}+\hat{r}_{j}\hat{r}_{i}\rangle_{\hat{\rho}}-\langle\hat{r}_{i}\rangle_{\hat{\rho}}\langle\hat{r}_{j}\rangle_{\hat{\rho}}$ ; ${ \varOmega}^{-1}_{\hat{\rho}}$ 表示${ \varOmega}_{\hat{\rho}}$ 的逆矩阵; 多模式的正交矢量 $\hat{q}({{g}}) = {{g}}\cdot\hat{{r}}$ , ${{g}} = (g_1,\dots,g_{2N})$ 为任意的实向量. 研究表明, 任意$\mathcal{A}_1|\dots|\mathcal{A}_M$ 分离的量子态的Fisher信息满足${ \varPi}_{{\text{Λ}}}(\hat{\rho}_{{\text{Λ}}}) = \bigotimes_{l = 1}^M\hat{\rho}_{\mathcal{A}_l}$ , $\hat{\rho}_{\mathcal{A}_l}$ 是 $\hat{\rho}_{{\text{Λ}}}$ 关于 $\mathcal{A}_l$ 的约化密度矩阵. 进而引入多模式的压缩系数${\text{ζ}}_{{\text{Λ}}}^2(\hat{\rho})$ 110 )式及(112 )式就是连续变量条件下的多粒子纠缠判据. 该判据的有效性, 已经得到利用2–-4不同组份压缩光实验结果的证实[176 ] .[177 -180 ] . 在多变量的参数估计问题中, 要考虑对一个$ d $ 维的矢量${\theta} = \{\theta_1,\theta_2,\cdots,\theta_d\}$ 进行估计. 此时要讨论的条件概率分布函数也是多变量的, $P({mu}|{\theta}) =$ $ \prod_{i = 1}^{m} P(k_i|{\theta}))$ , 即测量结果与待测矢量${\theta}$ 相关. 此时无偏估计子满足 $\bar{{\varTheta}}({mu}) = \sum_{{mu}} P({mu}|{\theta}) $ $ {{\varTheta}}({mu}) = {\theta}$ 且${\rm d} \bar{{\text{Θ}}}({{mu}})/{\rm d}\theta_l = 1$ , $(l = 1,2,\cdots,d)$ . 相应的CRB写为$[{{B}} ({{\theta}})]_{l,m} =$ $ \sum_{\mu} P({{mu}}|{{\theta}}) [{\varTheta}({{mu}}) - {{\theta}}]_l [{\varTheta}({mu}) - {\theta}]_m$ 表示, 显然, 其对角元素为通常的单变量方差$({\text{Δ}}\theta_l)^2$ . 相应的Fisher信息亦为对称Fisher信息矩阵$\partial_l = \partial /\partial \theta_l$ . 形式上讲, (113 )式给出了多变量估计时的极限, 其与测量的量子态、相位演化等都有关系. 但是, 寻找一种使(113 )式中等号成立的量子测量是一个长期的问题, 文献[178 ]给出了这样的一个充要条件, 证明了存在一种投影测量使(113 )式中等号成立. 进而, 他们进一步证明, 在多模式干涉仪中, 增加模式之间的量子纠缠有助于使多相位估计的精度达到多变量海森堡极限[179 ] .181 ], 及其参考文献). 随时间变化的相位也被称为波形(waveform)问题, 连续的测量才可能提取其随时间变化的信息. Tsang等[181 ] 2011年将Bayesian分析方法引入到含时问题的估计中, 并给出一个量子CRB. 需要指出的是, 对光频率钟的测量过程中也存在相应的问题. 由于钟激光不可避免地存在随时间的频率变化, 因此, 如何对其随时间的变化进行测量是对其实现稳定性控制的关键问题. 一般地, 含时待测物理参数更具有一般性, 如何发展具有普适性的、严格的计量理论仍是一个开放的问题.[182 ] . 近年来, 非高斯情况下的统计特性逐渐成为研究的热点, 与此相关的量子Ziv-zakai边界是其中的热点之一[183 ] . 在考虑非渐近的体系时, 则需要考虑Weiss-Weinstein边界[184 ] .? 感谢山西省****专家、意大利科学院光学研究所Smerzi研究员, 山西省****青年****、意大利科学院光学研究所Pezze博士, 以及意大利科学院光学研究所Gessner博士的讨论与建议.附录 A1 关于CRB的证明: 在给定未知相位$\theta$ 的条件下, 对可观测量${{\varepsilon}}$ 进行测量, 得到其概率分布函数为$P({{\varepsilon}}|\theta)$ , 进而可以得到待估计值的平均值为$\left\langle {\varTheta} \right \rangle_{\theta} = \sum _{{{\varepsilon}}} P({{\varepsilon}}|\theta) {\varTheta}({{\varepsilon}})$ , 对其求偏导, 得$\sum_{{{{\varepsilon}}}} P({{{\varepsilon}}} \vert \theta_0) = 1$ , 有A1 )式和式(A2 )时, 假定对 ${{\varepsilon}}$ 的求和独立于相位$\theta$ , 所以在求偏导时, 将微分移到求和里面. 考虑(A1 )和式(A2 )式, 可以得到$\langle A\rangle^2 \langle B\rangle^2 \geqslant \langle AB \rangle^2$ , $A = {\varTheta}-\langle{\varTheta}\rangle$ , $B = \partial L({{{\varepsilon}}} \vert \theta)/\partial \theta$ , 得到$B = \lambda A$ , $\lambda$ 独立于测量值${{{\varepsilon}}}$ . 结合$(\Delta{\varTheta})^2 = \langle({\varTheta}-\langle{\varTheta}\rangle)^2\rangle$ 就证明了CRB, 即(9 )式.附录 A2 关于量子CRB的证明: 对条件概率$P({{\varepsilon}}|\theta)$ 求偏导, 得到 ${\partial _\theta }P({\epsilon}|\theta ) = {\rm {Tr}}\left[ {{{\hat { E}}}({\epsilon}){\partial _\theta }\hat \rho (\theta )} \right]$ , 代入Fisher信息的定义式(10 )式有14 )式, 得到$\hat{L}_{\theta}$ , $\hat{ E}({{\varepsilon}})$ , $\hat{\rho}(\theta)$ 的厄米性质. 即${\rm Tr}\left[\hat{\rho}(\theta)\hat{L}_{\theta}\hat{ E}({{\varepsilon}})\right]^* =$ $ {\rm Tr}\left[\hat{L}_{\theta}\hat{\rho}(\theta)\hat{ E}({{\varepsilon}})\right]$ , 这样有下列不等式关系:$\Re(x)^2 = |x|^2-\Im(x)^2$ $\leqslant |x|^2$ , 等号当且仅当满足文中(16 )式和(17 )式时成立. 结合(A6 )式和(A7 )式得到$\sum_{{{\varepsilon}}}\hat{ E}({{\varepsilon}}) = \bbbone$ , 得到附录 A3 Barankin 极限推导, 假定$\theta_{\rm{est}}$ 是关于相位$\theta$ 的任意估计值, 其平均值为$\langle\theta_{\rm{est}}\rangle_{{{\mu}}|\theta} = \theta$ . 引入似然比率$\theta_1,\cdots,\theta_n$ , 有A14 )式的两边同时乘以$\langle\theta_{\rm{est}}\rangle_{{{\mu}}|\theta_0}$ 并且减去(A13 )式, 得到$ N $ 个系数$a_1,\cdots,a_n$ , 由(A15 )式得到95 )式得证. 






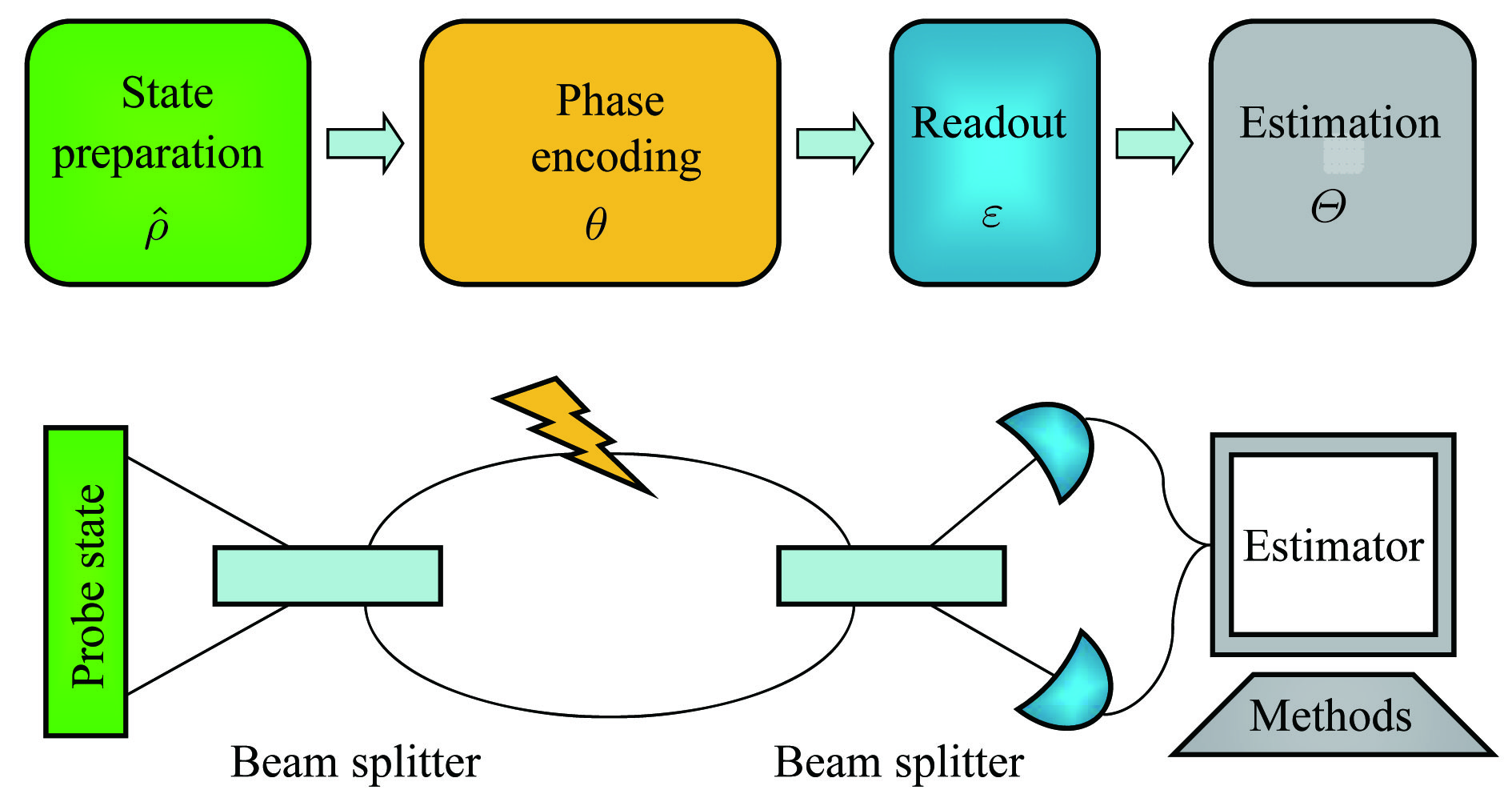 图 1 相位估计的流程示意图 (1) 探测量子初态
图 1 相位估计的流程示意图 (1) 探测量子初态







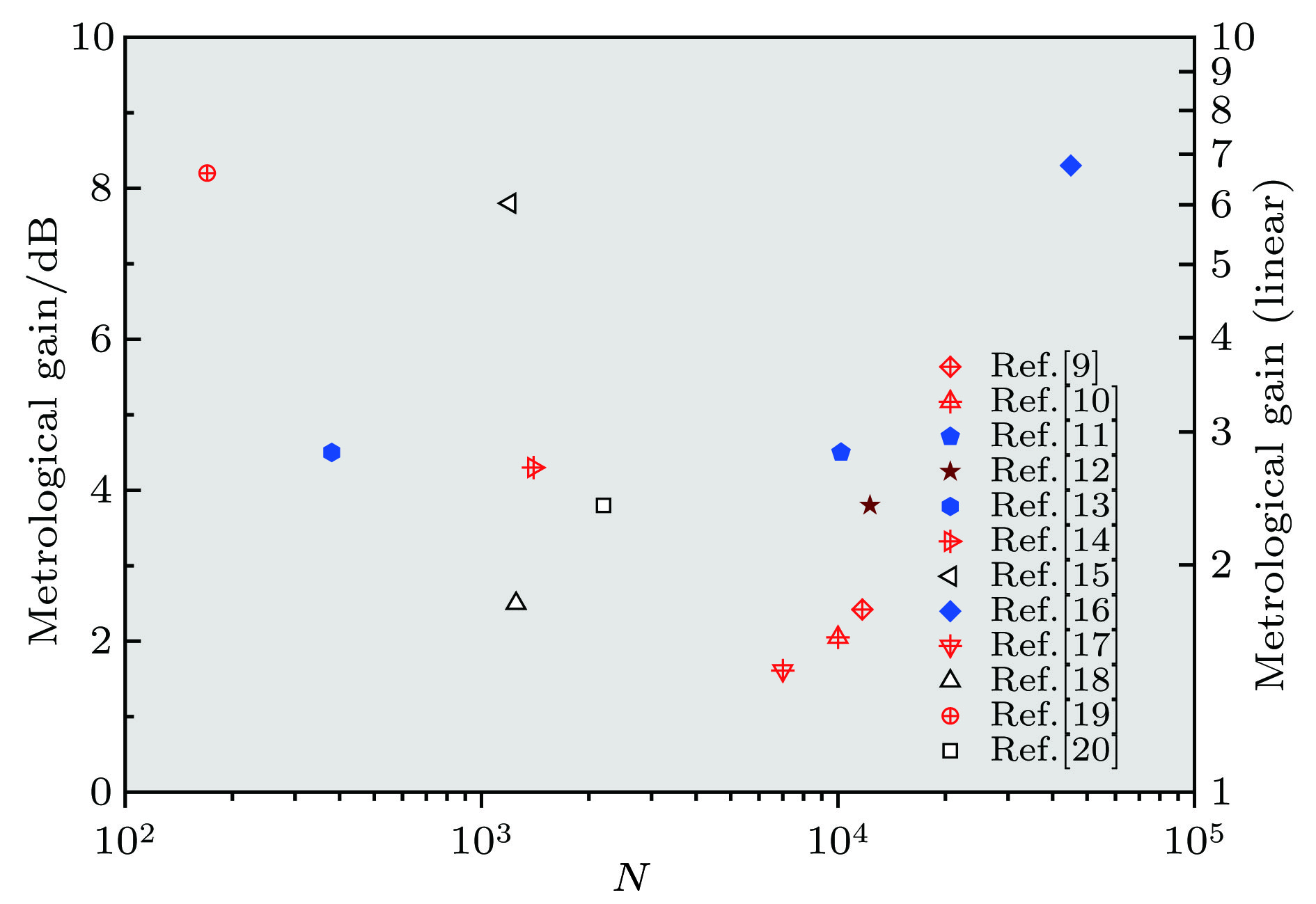 图 2 近年来利用超冷原子体系取得的超越标准量子极限的实验进展. 对数增益(左):
图 2 近年来利用超冷原子体系取得的超越标准量子极限的实验进展. 对数增益(左): 



























































































































































































































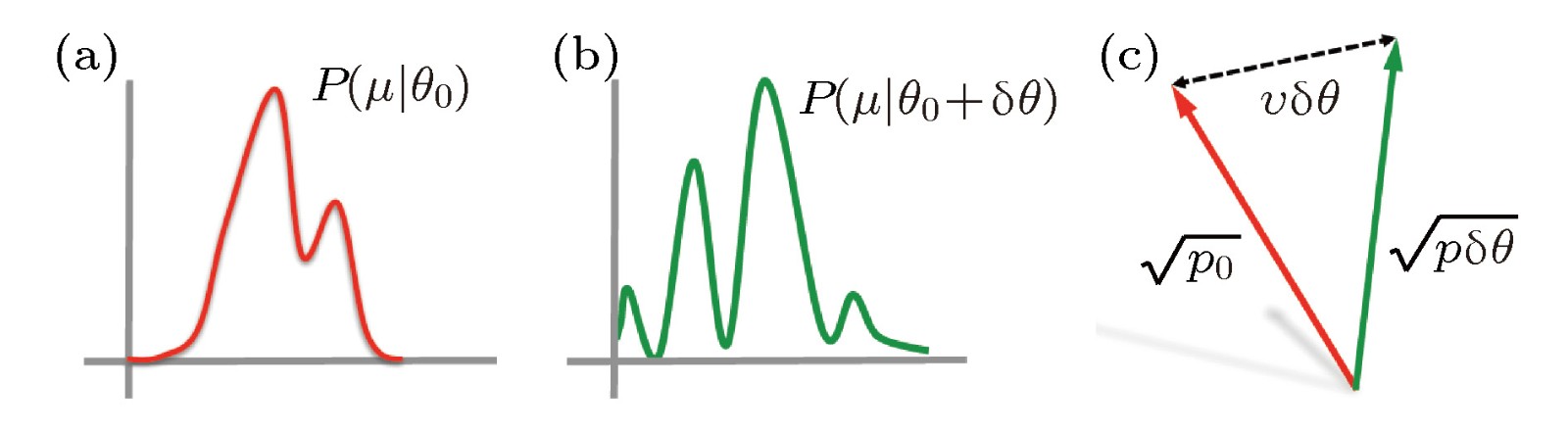 图 3 统计区分度和统计速度的示意图. 在给定
图 3 统计区分度和统计速度的示意图. 在给定



















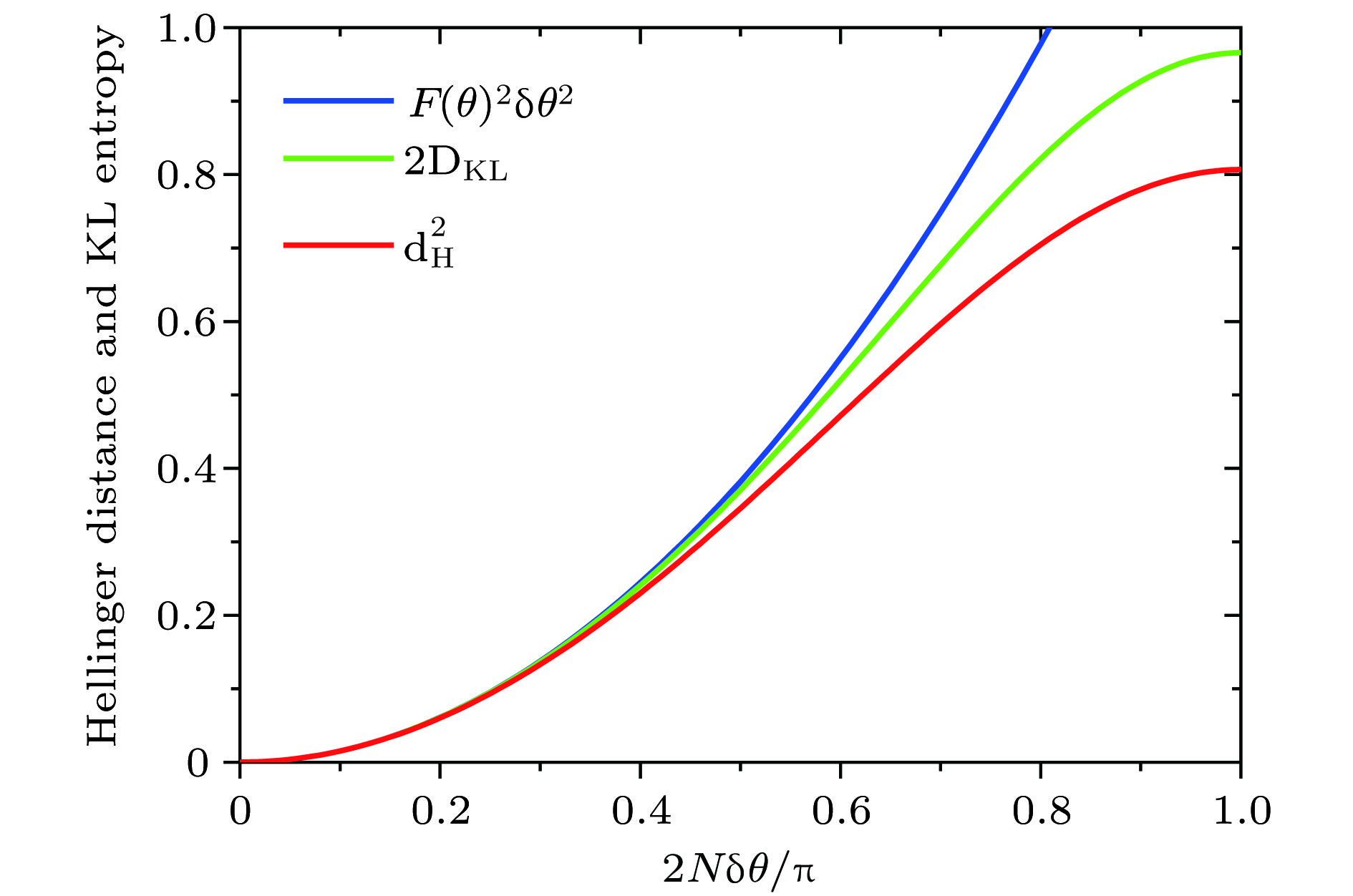 图 4 海林格距离
图 4 海林格距离
































 图 5 宇称振荡的测量结果和提取的Fisher信息 (a) GHZ(
图 5 宇称振荡的测量结果和提取的Fisher信息 (a) GHZ(














































































 图 6 有利于量子计量的
图 6 有利于量子计量的

























































 图 7 (a) 量子相变产生双数态过程; (b) 纠缠宽度分析表明双数态纠缠宽度约为
图 7 (a) 量子相变产生双数态过程; (b) 纠缠宽度分析表明双数态纠缠宽度约为







 图 8 两空间分离的粒子的相同自由度(a)和不同自由度(b)之间的非定域关联(Bell关联); (c)产生和验证自由度间非定域关联的实验方案. Alice 和 Bob 各自制备自旋态为
图 8 两空间分离的粒子的相同自由度(a)和不同自由度(b)之间的非定域关联(Bell关联); (c)产生和验证自由度间非定域关联的实验方案. Alice 和 Bob 各自制备自旋态为 



























 图 9 广义Bloch球上马赫-曾德干涉仪和拉姆齐干涉仪对集体自旋的操作. 图取自文献[5]
图 9 广义Bloch球上马赫-曾德干涉仪和拉姆齐干涉仪对集体自旋的操作. 图取自文献[5]






























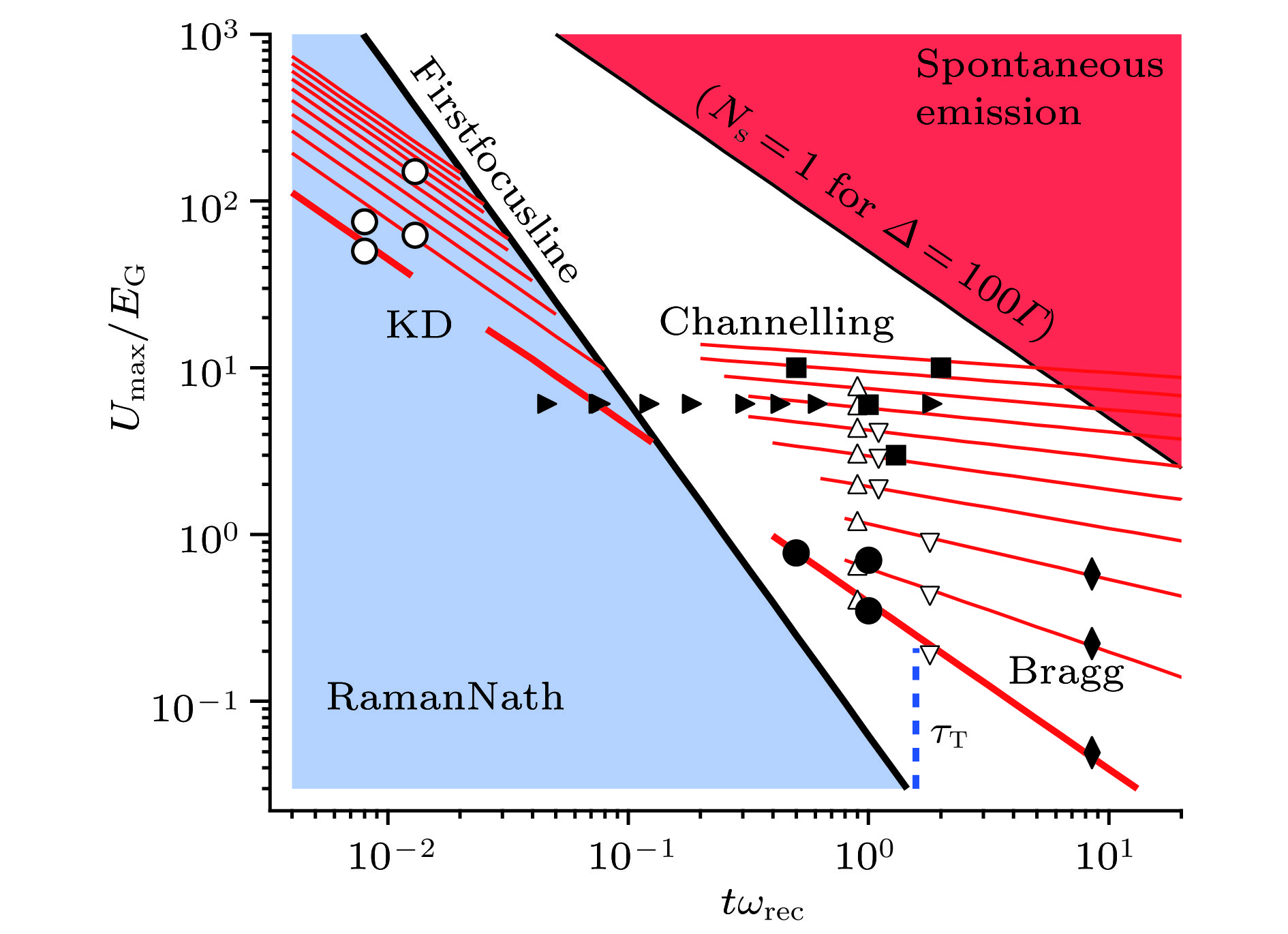 图 10 无量纲参数下的原子衍射图: KD衍射和Bragg衍射所满足的条件. 图取自文献[22]
图 10 无量纲参数下的原子衍射图: KD衍射和Bragg衍射所满足的条件. 图取自文献[22]










 图 11 (a) 马赫-曾德原子干涉仪示意图; (b) 重力计原理示意图. 图取自文献[139]
图 11 (a) 马赫-曾德原子干涉仪示意图; (b) 重力计原理示意图. 图取自文献[139]







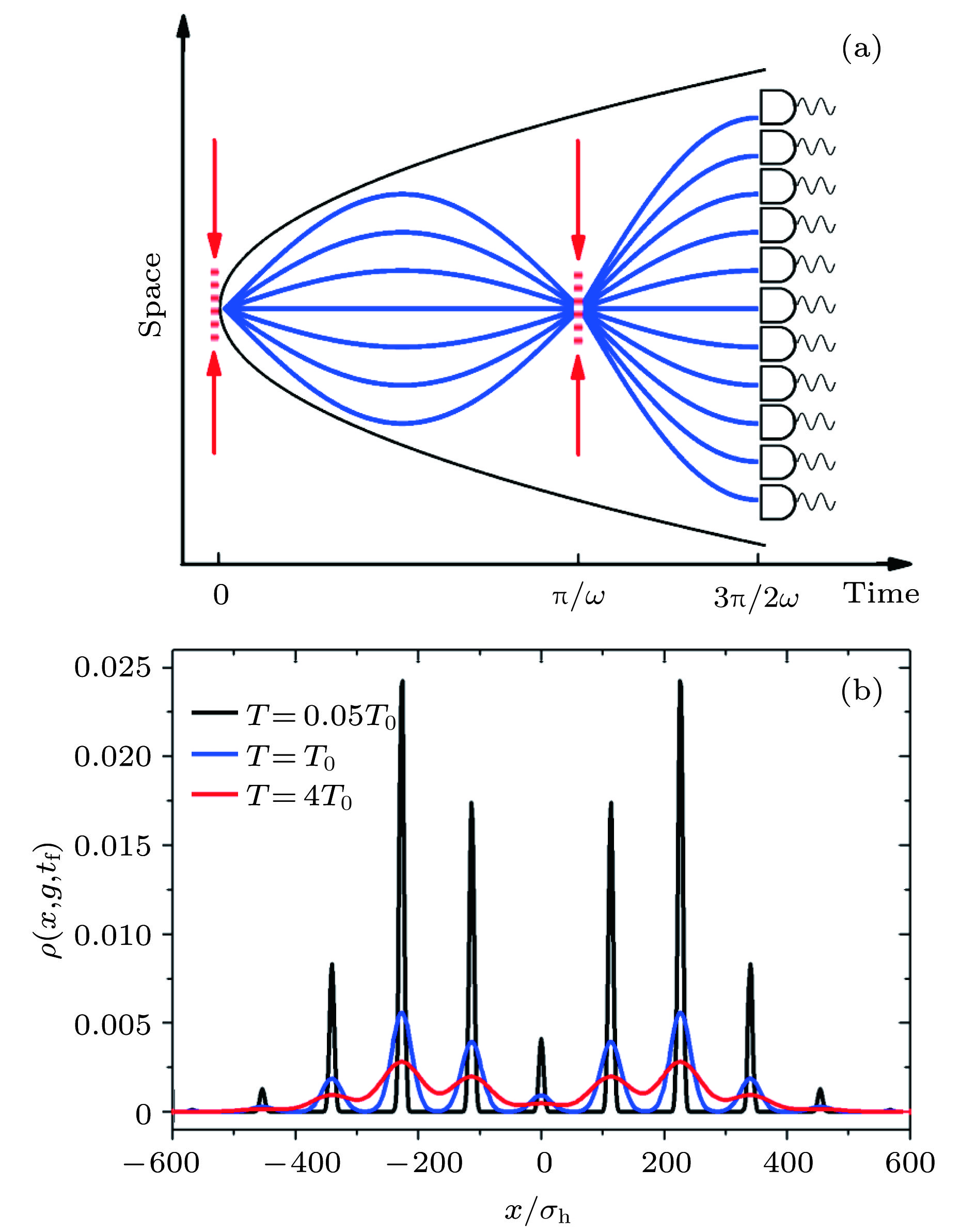 图 12 (a) 多模式KD 干涉仪.
图 12 (a) 多模式KD 干涉仪. 





































































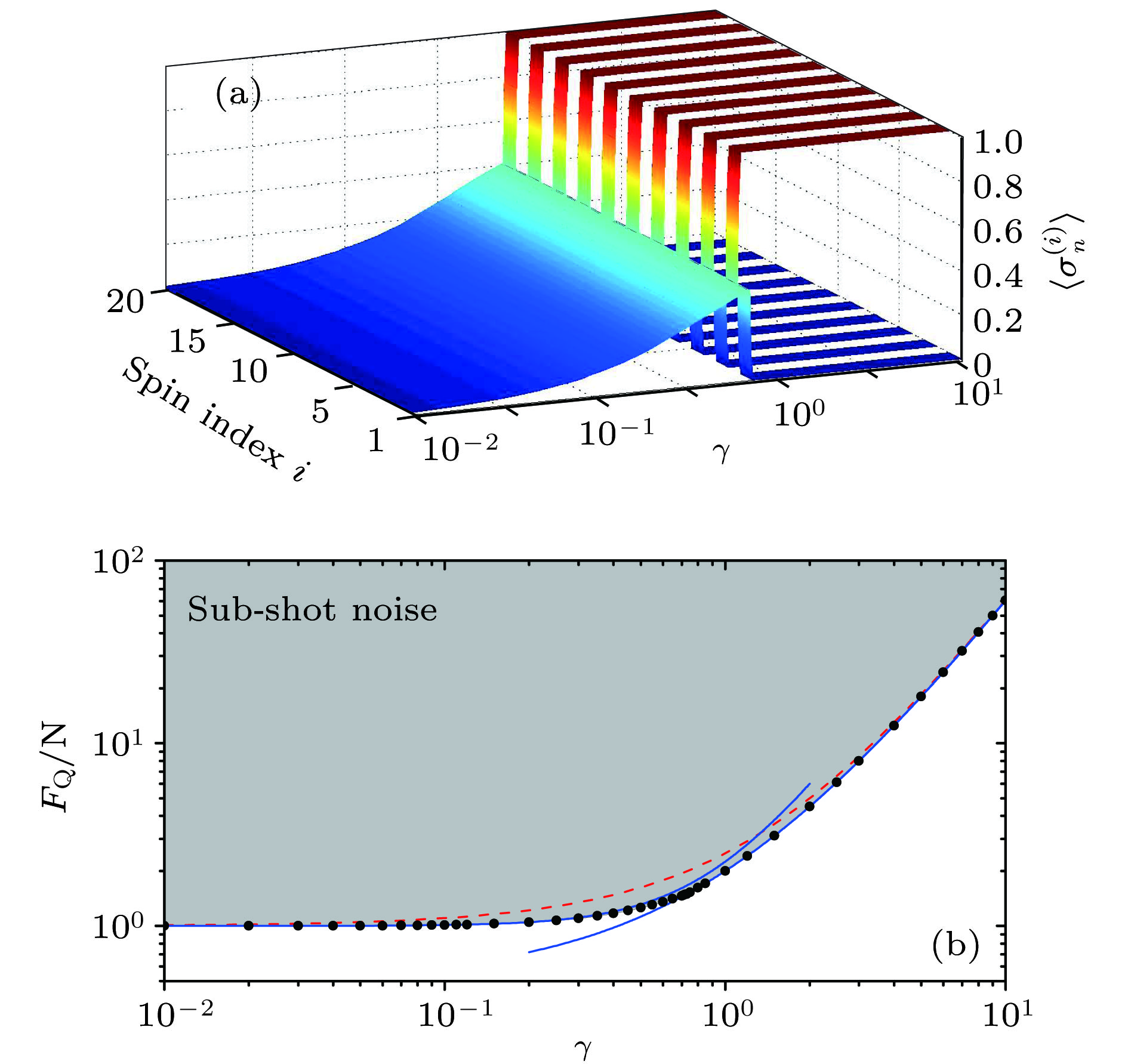 图 13 (a) 在Ising模型中, 平均自旋
图 13 (a) 在Ising模型中, 平均自旋














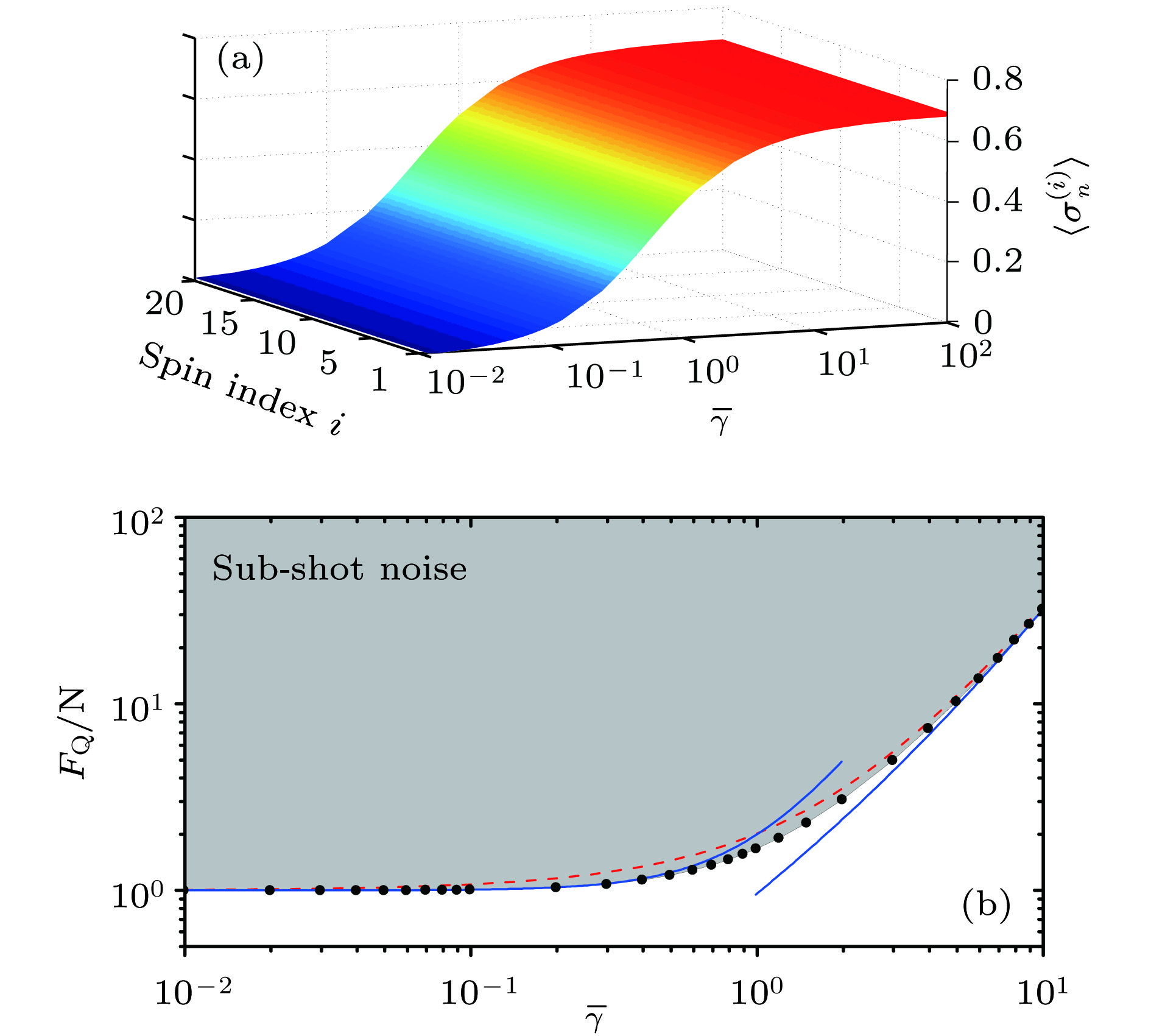 图 14 (a) 在LMG模型中, 平均自旋
图 14 (a) 在LMG模型中, 平均自旋










































































































































 图 15 (a) 最大似然估计偏差(绿色圆点)随独立测量次数
图 15 (a) 最大似然估计偏差(绿色圆点)随独立测量次数





























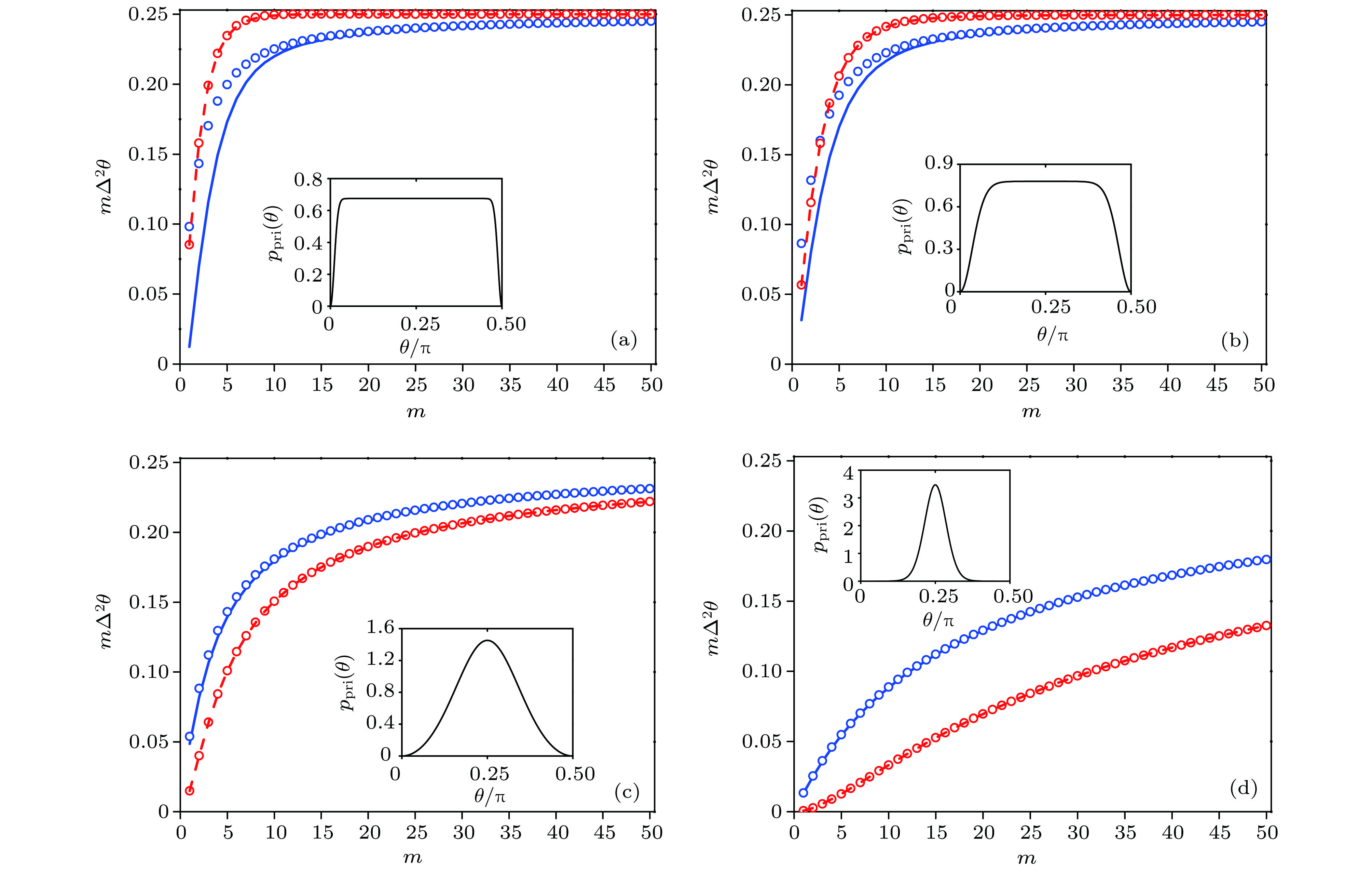 图 16 不同先验概率下, 频率论方法得到相位估计值的方差(
图 16 不同先验概率下, 频率论方法得到相位估计值的方差(

























































































