 ,*,??,2), �Ժ���,*,**,3)
,*,??,2), �Ժ���,*,**,3)STUDY ON EVOLUTIONARY ALGORITHMS FOR INITIAL ORBIT DETERMINATION OF NEAR-EARTH ASTEROIDS WITH TOO-SHORT-ARC1)
Li Xinran,*,??,2), Zhao Haibin,*,**,3)ͨѶ����: 2) ����Ƚ, �����о�Ա, ��Ҫ�о�����: С���ǹ��. E-mail:lixr@pmo.ac.cn;�Ժ���, �о�Ա, ��Ҫ�о�����: ̫��ϵС����۲���о�, E-mail:meteorzh@pmo.ac.cn
�ո�����:2020-03-12�����������:2021-03-18
| ��������: |
Received:2020-03-12Online:2021-03-18
����� About authors

ժҪ
����С���ǵ�Ѳ����Ŀ����ӿ��, �õ��˺����Ĺ۲�����.��Ѳ��۲ⷽʽʹ��õ����ݻ��ι���, ��ͳ�����ڶ����ʶ���ϴ��ڼ�������,��֮�̻��������Ȿ���IJ�̬��,�����Ч������Щ�̻����ݶ��ڷ��֡���������С���ǵ���в������Ҫ����.�ڽ����㷨�¹������̻�����ļ�����, ѡ����������$(a,e,M)$��ѡ��,����ά���ϵ͵�ͬʱ, ʹ�Ż�������������۲���.���ò������١��������IJ�ֽ����㷨,���ò�ͬƫ����С���ǵĹ��ģ�����ݽ�������,�Ի�õ����Ž⼰��ֲ��ۼ�������з���, ��ƫ���ʹ�������䱾���ĸ�����,����㷨�����������Ȳ���Ӱ��, ����С�����ռ��������������.��������㷨��Сƫ���������б��ֽϺ�,���Եõ���Ч���Ϊ���������ṩ�ο���Ϣ, ��ƫ���������ڴ�ͳ����ʧЧ�������,��Ȼ���Ž�������ֲ��в�������, ���ֲ�������ʵ��,�ɽ�Ϸֲ��ܶȺ���ֵ��С���з���. δ����Ҫ�Դ�ƫ������������һ���о�,������۲�λ�ú۲�ʱ�̶��㷨������Ӱ��, �������.
�ؼ��ʣ�
Abstract
Surveying projects of near-earth asteroids continue to emerge, and obtain massive observation data. However, this pattern makes the obtained arc too short, and the traditional methods have great difficulty in orbit determination and identification with ill-posed problem in itself when the arc is short. Then how to effectively use these short arc is of great significance for discovering, monitoring and evaluating the threat of asteroids. Under the evolutionary algorithms, a calculation framework for too-short-arc is constructed with three-variable $(a,e,M)$ optimization, which keeps the dimensionality low while makes the optimization results no longer rely on observational measurements. The differential evolution algorithm with fewer parameters and simple operation is used to conduct experiments using orbital simulation data of asteroids with different eccentricity, then the optimal solutions and their aggregation regions are analyzed. The large eccentricity orbits will have an impact on the sensitivity of the algorithm search due to its complexity, it is need to reduce the search space to improve the search ability. The results show that the algorithm performs well in small eccentricity problem, and can obtain valid results to provide information for subsequent work. And for large eccentricity problem, while the traditional method fails, the distribution of the algorithm still contains the real solution. For the phenomenon that the optimal solution is not obvious in the global distribution, it can be analyzed by combining the distribution density and fitness value. Further research on the issue of large eccentricity is needed in the future, the influence of different observation positions and observation time on the algorithm should be considered, and calculate by classification.
Keywords��
PDF (672KB)Ԫ������ά�����������������EndNote|Ris|Bibtex�ղر���
�������ø�ʽ
����Ƚ, �Ժ���. ����С���Ǽ��̻�����Ľ����㷨�о�1). ��ѧѧ��[J], 2021, 53(3): 902-911 DOI:10.6052/0459-1879-20-084
Li Xinran, Zhao Haibin.
����
����С������̫��ϵ��һ�����������, ���ֽ���С���ǹ������������ཻ, �Ե���ȫ���������滷������DZ����в,��6500�����ȫ�����ִ����[1]��2013�����˹�ij����ű�˹����ʯ���¼�[2-3]��������2004��6��������Σ��С����(99942) Apophis[4]. ���, ���֡�������С���Dz���������������ײ���ʡ���չΣ�ճ̶ȵ�����������о���ʮ����Ҫ��,�����������ý������ݾ���ȷ������С���ǵĹ��������Ϊ�ؼ�,С���Dz����ľ�ȷ�ȶ���ײģ�ͺ�Σ�������Ľ���кܴ�Ӱ��[5],ȷ�Ĺ����������Ϊ������Ԥ�������ṩ�ɿ�������,������漰��С���ǵĶ�������.NASA �� 2005 �����������90%��ֱ������ 140 m �Ľ���������б�Ŀ�����Ի�ȡ[6],Pan-STARRS[7]��Catalina[8]��NEOWISE[9]��LSST[10]��NEOCam[11]�ȴ����Ľ���С���Ǵ��ӳ�Ѳ����Ŀ�Ŀ�չʹ��Ѳ������������ǿ, �õ��˴����Ĺ۲�����. ��ͬʱ, �µĹ۲ⷽʽҲʹ������Ѳ����̽���ÿһ��Ŀ����к����ĸ��ٹ۲�,��˻�õĻ������ܶ�, ͨ��ֻ��һ�����ϵ�����[12]. Ϊ�����Ѳ��Ч��,δ���ɼ������ݽ����Ϊϡ��, ���ҹ�������ֲ���Χ�ܹ�, �����ڶ��ƫ���ʹ��,��Щ�̶�ϡ������ݸ����ȷ���Լ�ʶ������˺ܴ�����. ������Щ���̵Ĺ۲⻡�������Ǵ�ƫ���ʼ��̻���, ���ô�ͳ�� Laplace �� Gauss���������ж���, ��֮�̻����챾�����еIJ�̬��[12-16],ʹ�ö����Ѷȴ��������. �ɴ�, �����Ч������Щ���ݶ�С���ǽ��м��̻�����,��Ѳ����Ŀ�ij�����ü�С���ǵ�̽���о���������Ҫ����. �����������������,���̻�����ĸ����ȷ�������Ϊ�о��ȵ�.���̻��ľ��廡��Ŀǰ�����ϸ�Ķ���,ͨ�����þ��䷽���õ������������Ĺ۲⻡�μ���Ϊ���̻�,�������ڴ�ͳ�����ϵĶ̻�����[12-13,17-18].
��������㷽����, ��ѡ��Ҳ�ɱ������������������,��ѡ���˷��˾��䷽���е���������������, �����ʺ��ڽ��һά����ѡ����.���ڶ�ά���, ������̹��ڸ���. ����, �������ڳ�ֵ��Ҫ��ϸ�,����ֵѡȡ��������һ�������������, ���ڼ��̻������������Ҳ������.
Ansalone ��Curti[18]��Լ��̻����������������ģ������,Ӧ���Ŵ��㷨(genetic algorithm, GA), ���۲���ĩʱ�̵�б����Ϊ��ѡ����,ʹ��������ת��Ϊһ���Ż�����, �����õIJ�����ͨ��ѡ�����϶�.��־ʤ��[19]���㷨���õ��̻��������������, �о����ڲ�����ϵ����Ƕ̻�����. ���ڵ�[20]���Ŵ��㷨Ӧ��������Ķ̻���������, ����˫$\rho$����ģ��,��ϡ�����ݽ��ж���. ����Ƚ�����[21-22]�Բ����������Ŵ��㷨Ӧ�õ��˼��̻�����������,�ڵػ��Ŀռ�Ŀ�궨�������еõ��˽Ϻõ�Ӧ��.�����㷨����ѡ�����п��Խ������������ʤ��̭������Ӧ�õ������Ž����Ѱ��,��̽��������ͨ�����۾���, ����ʽ��Ѱ�����ս�. �㷨���н�Ϊ��������ۻ���,�ڶ���������о���Ӧ��[23-24]. �㷨��������Ϣ�������Խ�С,�������е�����Ӱ��Ҳ��С, ���ý����㷨�о����������ѳ�Ϊ�µ�����.���Ŵ��㷨��, �����㷨�л��������ֲ�ͬ�������Ƶ��㷨, �㷨�����ص������,����Ⱥ�㷨(particle swarm optimization, PSO)����ֽ����㷨(differentialevolution, DE), ������ͳ��ѧ˼��ķֲ����Ʒ�(estimation of distributionalgorithm, EDA)���ѱ�Ӧ���ڽ���ռ�Ŀ��Ķ̻���������,���ڽ�Բ������нϺñ���.
���Ľ������㷨����С���ǵļ��̻���������, ����������,�Բ�ֽ����㷨Ϊ��������ģ�����Ͻ��м�����֤,���Ƚ��㷨�ڲ�ͬƫ�����¶̻����������еı���, ̽�ִ�ƫ�������㷨������.
1 �����㷨
20 ���� 60 ��������㷨����ģ����Ȼ�����ķ����״α����, 70 �����������ص������о�, ֱ�� 21 ���ͻ�������[25].��������ߴ����Եľ���GA�㷨, �㷨ͨ��ģ����Ȼ��������ʤ��̭�Ĺ����������Ž�,������Ӧ����ѡ�������ӽ�, GA �㷨�������Ӵ��и��ʷ�������,�Ӷ��ڽ�����ͬʱѰ���µĿ�����. �� 20 ���� 70 ��� �� Holland �� De Jong����������㷺Ӧ��, �����Ժ�ȫ�����������ѵõ�֤��[25].
PSO�㷨�� 1995 �걻 Kennedy �� Eberhart[26] ���,Դ�ڶ����ಶʳ��Ϊ���о�, �������ҵ�ʳ�������Ч�ķ���������Ѱ��ǰ����ʳ���������ĸ�������.��GA�㷨��ͬ, ������Ⱥ�����ܶ������Ŵ�����, ����Ⱥ���и������Ϣ�ķ���,ʹ����Ⱥ����˶����������ռ��в���������������ݻ�, ���ջ�����Ž�.
DE������ 1996 ���� Storn �� Price[27]���,��Ŀǰ����Ч�����������ѡ�㷨֮һ, ��ģ���������,����ʼ��Ⱥ�������������������Ϊ���췽��, ���ӵ�������������,�Դ˲����¸���, ��������ʹ����Ӧ�����ĸ��屻��������.��ͬ���Ŵ��㷨ԭ�����ö����Ʊ�����������ɢ��������,����������������������Ż�����. �㷨����˼������GA�㷨��PSO�㷨,�㷨������GA�㷨�Ľ�������,ͬʱ��������PSO�㷨�еĸ��·������GA�㷨�е��Ŵ�����, ��˲��������ӽ���,���㸴���Խ���.
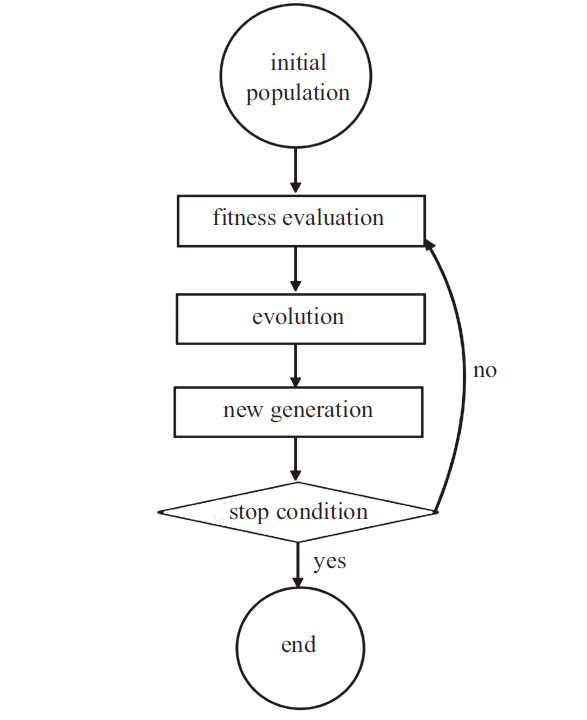
�����㷨�Ľ������ƶ��ֶ���, ��ͨ������������ͬ��.һ�㽫��Ҫ����ѡ�ı�����Ϊ����,ͨ����ѡ�����������һ�������ĸ�����ɳ�ʼ��Ⱥ. ��Ⱥ�ڸ�����Ŀ��Ϊ��Ⱥ��,��Ⱥ��Խ����������ҲԽǿ, ������Ч����֮����. ��ֵ��������������������,����ѡ���е�Ŀ�꺯��, ������С������, ������ֵԽС��Խ����.ͨ������������Ԥ������ʱ��ֹ���õ����Ž�. ����������ͼ1.
ͼ1
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ1�����㷨����ͼ
Fig. 1The flowchart of Evolutionary Algorithm
2 �������IJ�ֽ����㷨
DE �㷨����Ҫ������GA�㷨����, ��Ҫ��������(mutation)������(crossover)��ѡ��(selection)���ֲ���,������ͬ. �㷨������ɳ�ʼ��Ⱥ${X}=\left\{ {x_{1} ,x_{2} ,...,x_{NP} } \right\}$, ����$NP$Ϊ��Ⱥ��, $x_{i} =\left\{ {x_{i1} ,x_{i2} ,...,x_{iD} } \right\}$Ϊ$D$ά����, $D$Ϊ��ѡ������ά��. DE �㷨�Ƚ��б������, ��ÿ������$x_{i} $����õ�����$V_{i} $,���췽ʽ��GA�㷨��Ϊ��, �����ı��췽ʽ����������(1) DE/rand/1
$\begin{eqnarray*} V_{i} =x_{r0} +S(x_{r1} -x_{r2} ) \end{eqnarray*}$
(2) DE/best/1
$\begin{eqnarray*} V_{i} =x_{best} +S(x_{r1} -x_{r2} ) \end{eqnarray*}$
(3) DE/target-to-best/1
$\begin{eqnarray*} V_{i} =x_{i} +S(x_{best} -x_{i} )+S(x_{r1} -x_{r2} ) \end{eqnarray*}$
����$r$Ϊ������ͬ�ľ��ȷֲ����������, $r_{i} \in [1,NP]$��$r_{i} \ne i$;$S$Ϊ��������, һ��������[0, 1]��ȡֵ, ������������ȡ�ϴ��ֵ,�ۺ�����[27,28,29,30], ��Χ��$[0.4,1]$�ȽϺ���, $ S $ȡֵ�������㷨��ȫ����������,Խ���ȡֵȫ����������Խǿ; $x_{best} $Ϊ����ֵ������ȷ���ĵ������ŵĸ���,DE/*/*�� DE �㷨����ı��﷽ʽ, ����*���α�ʾ������Ͳ������.���������õ���Ⱥ$V=\left\{ {V_{1} ,V_{2} ,...,V_{NP} } \right\}$��ԭ��Ⱥ$X$�������, �õ�����Ⱥ$U$. ��������
$\begin{eqnarray*} U_{ij} =\left\{ {\begin{array}{ll} V_{ij} , & \mbox{, } r<CR\ {or}\ j=rand \\ x_{ij} , & \mbox{, } {others} \\ \end{array}} \right. \end{eqnarray*}$
����$r$Ϊ[0, 1]������ȷֲ��������, $rand$ Ϊ$[1,D]$�Ͼ��ȷֲ����������,$CR$Ϊ�������. �˲���ʹ��$U_{i} $��һ�����ʽ��ܱ������ķ���,��ȷ��������һ���������Ա������, $CR$��������Ⱥ�Ķ�����,�����н���$CR$ȡ0.1��0.9[27-30]��Ϊ��ʼ����ֵ. ������ѡ�����,DE�㷨������̰������, ����¸������ڳ�ʼ����, ��ȡ����֮,�����ʼ���屣������, ������һ�εĽ���
$\begin{eqnarray*} x_{i} (k+1)=\left\{ {\begin{array}{ll} U_{i}, &\mbox{, } F\left( {U_{i} } \right)<F\left( {x_{i} } \right) \\ x_{i} (k), & \mbox{, } {others} \\ \end{array}} \right. \end{eqnarray*}$
���� $k $��ʾ��������, ��ʾ$x_{i} (k)$�������� $k$ ���ĸ���, ����$F\left( \cdot \right)$��ʾ���������ֵ. ��ѡ��ʽ�ɿ������Ÿ���һ���������һ��,ÿһ����Ⱥ��������ǰһ��.
ͨ�������������������һ����Ⱥ�Ľ���, ��ͨ�����ϵ����������Ž�.�㷨���ò����е�ѡ��ͽ��������ֻ��һ�ַ�ʽ, ���������ѡ��Ҳ�Ƚ���,�һ�����ʽ����ͬ��.
3 $(a,e,M)$��ѡ��
3.1 ����ѡ��
�����Ż�����, �Ż������������������ѵ�����,��ʹ���������������˴���ȵ�����. ��˱��IJ�����3��Kepler����,����Ԫʱ��$t_{0} $��$(a,e,M_{0} )$��Ϊ�Ż�����, ��Ansalone ��Curti[18]������β�۲�ʱ�̵�б����Ϊ�Ż������ķ�����ͬ, ��ֻ����һά�������, ʹ���Ż����������Ҫ�����۲����Ϳ��Եõ������Ľ�, �������ϴ���.3.2 ��ʼ��Ⱥ�������ɺ���ֹ����
����������Ϣ������ѡ������ֵ��, ���ڽ����㷨�Գ�ֵҪ��ϵ�,��ȷ����Ϣʱ�ɽ���Χȡ�Ĵ�һЩ: $a\in [a_{l} ,a_{u} ]$, $e\in [e_{l} ,e_{u}]$, $M_{0} \in [M_{l} ,M_{u} ]$.��ʼ��Ⱥ��ÿ�������ÿ����������ȡֵ��Χ�����ѡȡ,�ظ�$NP$�μ��õ�������Ⱥ$\left\{ {x_{NP} } \right\}$.��ֹ����ѡȡ��Ϊ��ͨ�ĵ�������������������$G$��ֹ������$C$��û�н���.3.3 ��ֵ����
����֪һ��۲���$\left\{ {t_{i} ,\alpha_{i} ,\delta _{i} ,i=1,2,..., n}\right\}$, $(\alpha_{i} ,\delta _{i} )$����$t_{i} $ʱ�̵ijྭ�ͳ�γ,������Ԫʱ��$t_{0} $��$(a,e,M_{0} )$�ɵ�$t_{i} $ʱ�̻Ƶ������µĽ����$M_{i}$, $f_{i} $��$E_{i} $, ��һ���ɵ�$\left.\begin{array}{l}r_{i}=a\left(1-e \cos E_{i}\right) \\\rho_{i}=\pm \sqrt{r_{i}^{2}-R_{i}^{2}+\left(L_{i} \cdot \boldsymbol{R}_{i}\right)^{2}}-\boldsymbol{L}_{i} \cdot \boldsymbol{R}_{i} \\\boldsymbol{r}_{i}=\rho_{i} \boldsymbol{L}_{i}+\boldsymbol{R}_{i} \\\boldsymbol{R}_{i}=\boldsymbol{R}_{\mathrm{S}}+\boldsymbol{R}_{\mathrm{e}}\end{array}\right\}$
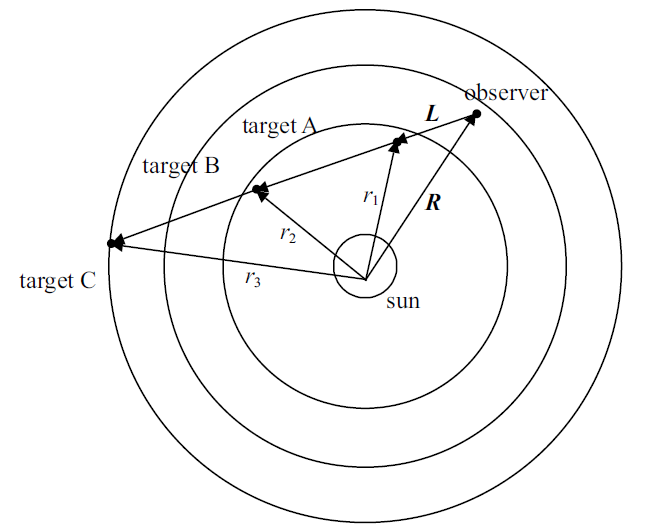
���� $L_{i} =\left( {\cos \delta _{i} \cos \alpha_{i} ,\cos \delta _{i}\sin \alpha_{i} ,\sin \delta _{i} } \right)^{T}$, $r_{i} $Ϊ$t_{i}$ʱ��Ŀ�������λ��ʸ��, $r_{i} =\left| {r_{i} } \right|$, $\rho _{i}$ΪĿ��б��, $R_{i} $Ϊ��վ������λ��ʸ�����ɲ�վ����λ��ʸ��$R_{e}$�͵���λ��ʸ��$R_{S} $�õ�.���ڵ�����С���ǵ�Ϊ���λ�÷ֵ��ں͵����������,�������$R$��$L$�ļнǶԹ۲⼸�ν��з�������.
��$R\cdot L<0$ʱ, ��ͼ2��ʾ, ��ʱ�۲�Ŀ�������λ����A, B, C�������:
ͼ2
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ2$R\cdot L<0$ʱ������С���ǵ�λ��
Fig. 2The locations of Earth and asteroid when $R\cdot L<0$
(1) ��$\left| r \right|<\sqrt {R^{2}-(L\cdot R)^{2}} $ʱ,���۲�Ŀ������ĵ�������С�ڹ۲�·���������ĵĴ�ֱ����, ����Ȼ�Dz����ܵ�,���ֱ�����������;
(2) ��$\left| r \right|>\left| R \right|$ʱ, ��С���ǵĹ�����ڵ���, ����λ��C;
(3) ����, ��ʱĿ��λ�������ֿ���A��B, ��������������ȷ�������λ��, ��ֱ����. ����һ����dz�����, ������ɹ��ฺ��.
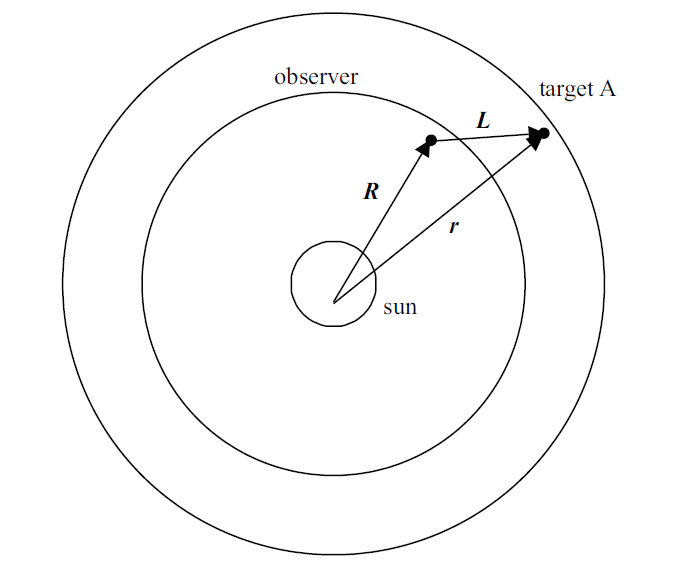
��$R\cdot L>0$ʱ, ��ͼ3��ʾ, ��2�����.
ͼ3
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ3$R\cdot L>0$ʱ������С���ǵ�λ��
Fig. 3Locations of Earth and asteroid when $R\cdot L>0$
(1) $\left| r \right|<\left| R \right|$ʱ, Ŀ�������ڵ���, �����ǵ�$R$��$L$�ļн�, ����������ܷ���;
(2) ����, ��ʱĿ��ֻ����λ��A, ������ڵ���֮��.
������������, ��ɵ�ʽ(1). ��Ŀ��λ��ͼ2λ��B��C, ��ͼ3λ��Aʱ, ʽ��ȡ��$+$��, �������ȡ��-��,������һ�Թ۲�ʱ��$(t_{k} ,t_{j} )$��$t_{k} >t_{j} $, �ɵö�Ӧ��$(r_{k},r_{j} )$��$(f_{k} ,f_{j} )$, ��ʱ����ֵ����
$\begin{eqnarray*} \varDelta_{jk} =f_{k} -f_{j} -\cos^{-1}\left( {\frac{r_{k} \cdot r_{j} }{r_{k} r_{j} }} \right), \\F\left( {x_{i} } \right)=F\left( {(a,e,M)_{i} } \right)=\left( {\frac{2}{N(N-1)}\sum\limits_{j=1}^{N-1} {\sum\limits_{k=j+1}^N {\left( {\Delta _{jk} } \right)^{2}} } } \right)^{\frac{1}{2}} \end{eqnarray*}$
���Կ���, ��ֵԽС��ʾ����Խ��.
3.4$(i,\varOmega ,\omega )$�����
ͨ�����ϼ����ѿɵ�$t_{0} $��$(a,e,M_{0} )$, �Ӷ��õ�ÿ���۲�ʱ�̵�λ��ʸ��$r_{i} $, �Ӷ��ɵ�$(i,\varOmega ,\omega )$, ���ǵ����㾫��, ����ÿ��$(r_{i} ,r_{j} )$�õ���$(i,\varOmega ,\omega )$ȡ����������ֵ��Ϊ�����.4 ��ֵ����
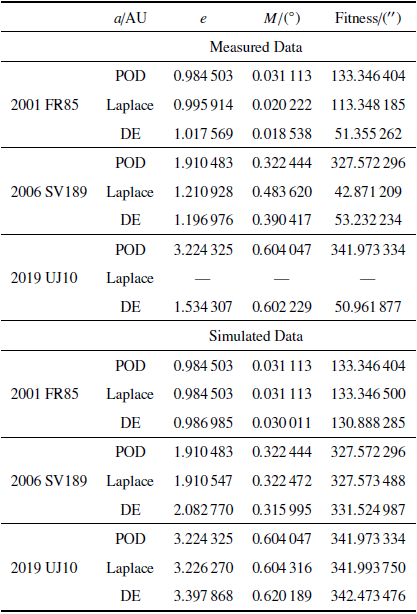
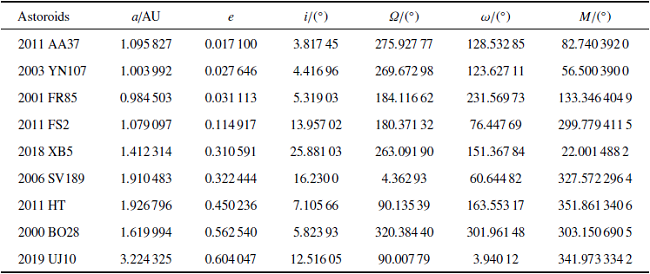
����DE�㷨����MATLAB��д����, �㷨����ѡ��$NP=300$, $S=1.0$, $CR=0.9$,���췽��ѡ��DE/rand/1,����������$G=200$,������������$C=30$������ֵ����Ա仯С��10$^{-12}$����ǰ��������.���ǵ�����С����, ��ֵ��ѡ��ΧΪ$a\in [0.8,4.0],M\in [0,2\pi ]$.ѡȡ����ƫ���ʲ�ͬ�Ĺ��, �ֱ������������, ���봫ͳ��Laplace�������бȽ�.��1������ʵ��������ģ�����ݵĶ�����,ģ�����ݻ�����۲����ݵij�ʼʱ�̡��۲�ʱ�̺Ͳ�վ��������,ͬʱ�����˹۲�ļ��ι���, ����POD�����ѻ�õĹ������, ��Ϊ�ο���.
Table 1
��1
��1С����ʵ��������ģ�����ݶ�����
Table 1
 |
�´��ڴ�|����CSV
���Կ���, ģ�����������ַ������ɵõ�������, Laplace�������ӽ�ȷֵ.����ʵ������ʱ, ��ƫ���ʽ�С, DE�㷨�Ľ��ƫ���Դ�, ��ƫ����������ʱ,Laplace�����Ľ��ƫ��̶�����, ��$e>0.6$ʱ, �ѵò�����Ч���,��DE�㷨��Ȼ����ƫ��, ��Ȼ���Եõ���Ч��Ϊ���������ṩ�����Χ�IJο���Ϣ.��һ����, Laplace����ֻ���ɵ�һ���жϹ����Ϣ, �������������ʱ,�õ��Ľ����ȫ��Ч, ��ָ����������. �������㷨�Ľ�����������ǵ�һ�Ľ�,��Ч��Χ�ڵĽⶼ����Ч��, �ɸ��ݶ����ķֲ��жϽ������Ч��,����ʾ����ڷ�Χ. ���ڴ�ƫ���ʼ��̻����, DE�㷨�������Ը���.
���̻��������Ȿ����������, ��ƫ��������ʱ��ø�Ϊ����,ϡ�������е����Ҳ���ܶԼ�������ܴ�Ӱ��, ���, Ϊ���ص��ע�㷨�ļ������,����ģ�����ݶ�������м�, ��Ҫ̽��DE�㷨�ڼ��̻��½������.���Ӳ�ͬƫ���ʵ�С���ǽ��бȽ�, ѡȡMPC��С���ǹ�9��, �Ѿ�ȷ���Ĺ������2,ƫ���ʸ���[0, 0.7]�ķ�Χ, ÿ�����ݵ�ʱ����Ϊ1-3��, ���ݵ㲻��10��.
Table 2
��2
��2С���ǹ������
Table 2
 |
�´��ڴ�|����CSV
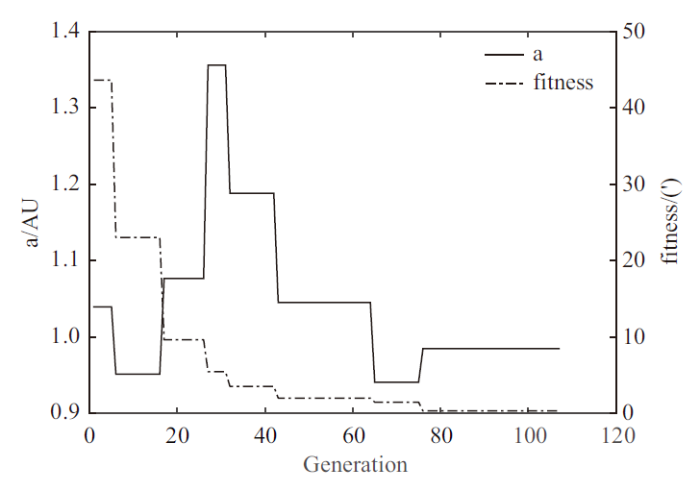
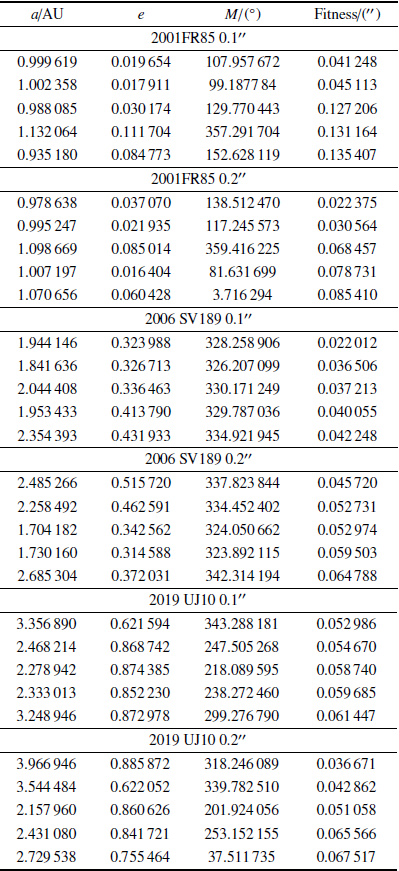
ͼ4������С����2001 FR85��һ��������������й���볤��$a$����ֵ�ı仯.
ͼ4
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ4�볤��$a$����ֵ$F$��������������$e\in [0.0,0.3]$, $NP=300$. ���Կ���DE�㷨��Ч�ʺܸ�, �����ٶȺܿ�.
Fig. 4The convergence process of the semi-major and fitness value
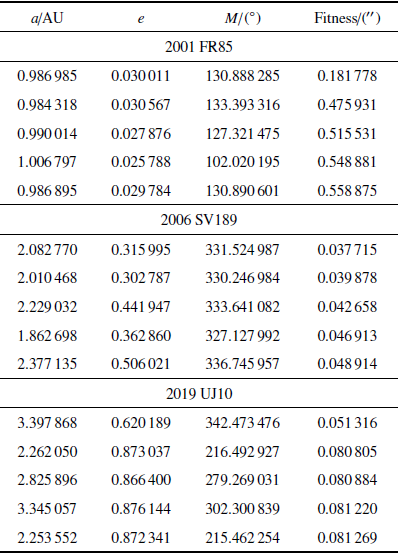
���ǵ���ƫ���ʶ�����Ͻ�Բ�����Ϊ����, �������,����ʱƫ����$e$��ȡֵ��Χ��ֱ������[0, 1], ���Ƕ�9�����ݽ��н��з������: ��$e\in [0.0,0.3]$ʱ,ֵ��ѡ��ΧΪ$e\in [0.0,0.3]$; ��$e\in [0.3,0.6]$ʱ, ֵ��ѡ��ΧΪ$e\in[0.3,0.6]$; ��$e\in [0.6,1)$ʱ, ֵ��ѡ��ΧΪ$e\in [0.6,0.9]$.Ϊ����������Խ����Ӱ��, ���ò�ͬ�������ÿ�������ظ�����300��. ���㷢��,���ڿռ���Ƭ�ļ�������ͬ, �Ż��������ֵ��������,�������Բ����Ľ������˴˽ӽ�, �����ֵ�IJ�����ͬ����Ҫ��ע. ��3 �г���2001FR85, 2006 SV189, 2019 UJ10������ֵ��С��ǰ5����ѡ���.�㷨��Ȼ��ͬ�ڿռ���Ƭ��Բ����¿���Ѹ��ȷ�ҵ������Ϣ�ı���,������ֵ��С����, ��ʵ������ֵ���Ծ��н�Ϊ���Ե�����,��Сƫ���ʵ���ֵ���Ʊȴ�ƫ���ʸ���ͻ��. ������1-3��Ĺ۲�����,�õ������Ž���MPC�и��Ĺ����������һ��.
Table 3
��3
��3����С���ǹ������
Table 3
 |
�´��ڴ�|����CSV
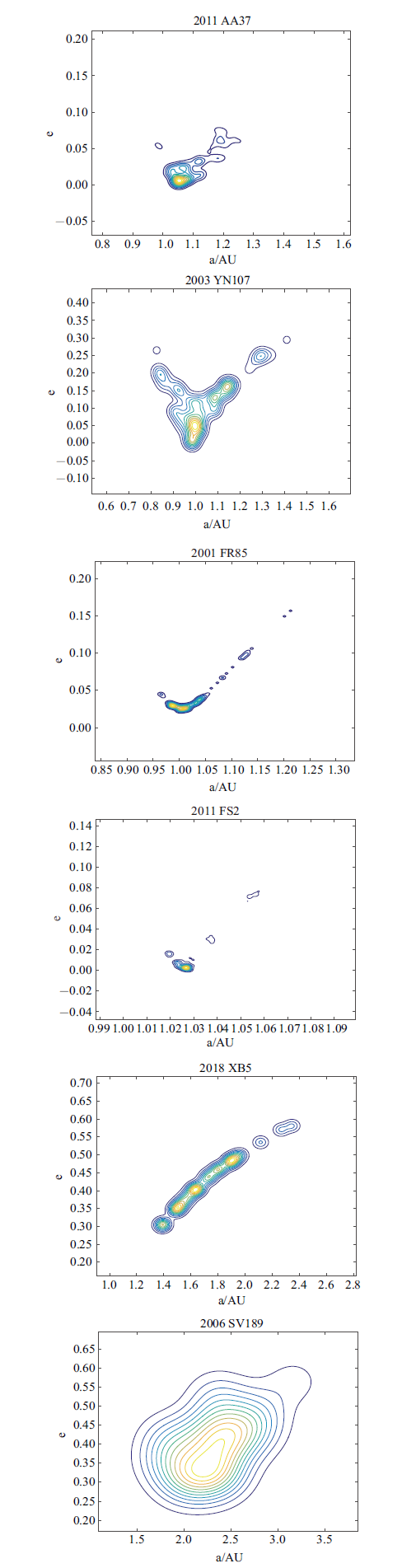
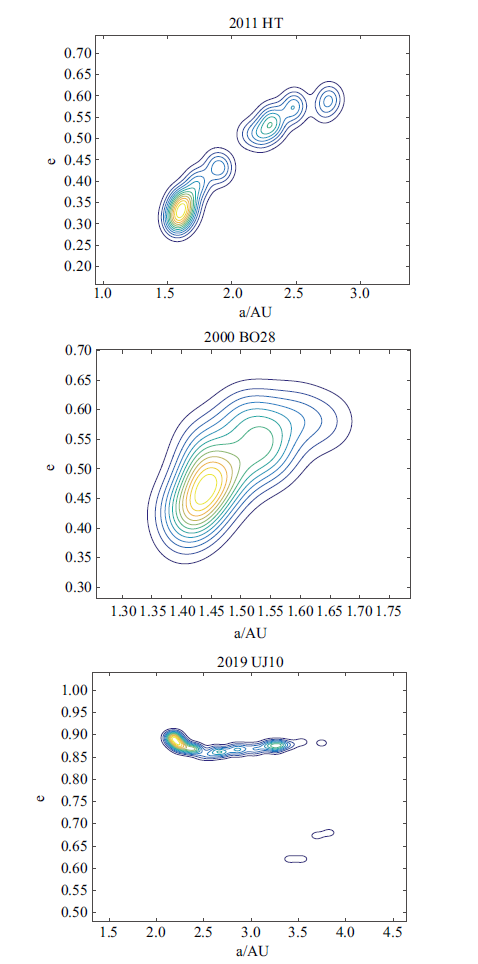
ͼ5������9�������$(a,e)$�����ܶȷֲ�ͼ, ͼ����ɫԽdz��ʾ�ۼ���Խ��.���Կ���, ��ƫ���ʽ�С($e<0.1)$ʱ, ���Ž���Ҫ���зֲ�����ʵ�������,������ֵ��С�Ľ�����Ǻ�, DE�㷨���Եõ���Ч�Ľ��.����ƫ����������($e>0.3)$ʱ, ��ý�ķֲ�������ƫ��, ����ֶ���ֲ�����,�ҷֲ���е�����Ҳ��������ʵ�����������, �ֲ��������Լ�������ʵ�������.2018 XB5��2011 HT�ж���ֲ��ۼ�������,��ʵ����������е�ij�������Ǿۼ����������Ƶ�����. ��ȻDE�㷨�����������, �����ڻ�õĶ�����в�û����������, ����ֲ�����.Сƫ���ʵĹ����Ϊ�ȶ��Ӷ����ױ������õ���, ����ƫ��������ʱ,�������̶Թ۲����ݵ������Կ��ܲ����仯.
ͼ5
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5�����ܶȷֲ�ͼ
Fig. 5Probability Density
ͼ5
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5�����ܶȷֲ�ͼ(��)
Fig. 5Probability Density (continued)
���, ����Сƫ���ʹ��, �㷨����ֱ��Ѱ�ҵ����Ž�, �����ڴ�ƫ���ʹ��,���Ϸֲ��ܶȺͽ����ֵ����ѡ��, ƫ���ʵ�����ʹ�����Ϊ����,Ҳ�����㷨����Ѱ���Ž���������������½�,����Ѱ���������������Ž���Ѱ�����ƫ��, ��Ȼ�����ҵ���ֵ���ŵĽ�,����������, ��ֵ���������ƵĽ�ᱻ����������, ��ʵ���С��Χ�ڵľۼ�����,������ֲ���û����������.
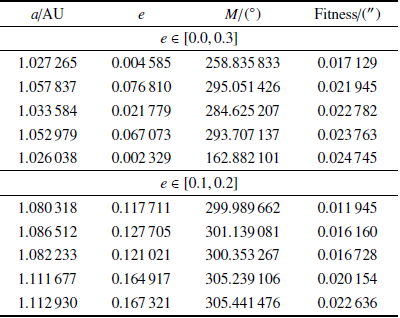
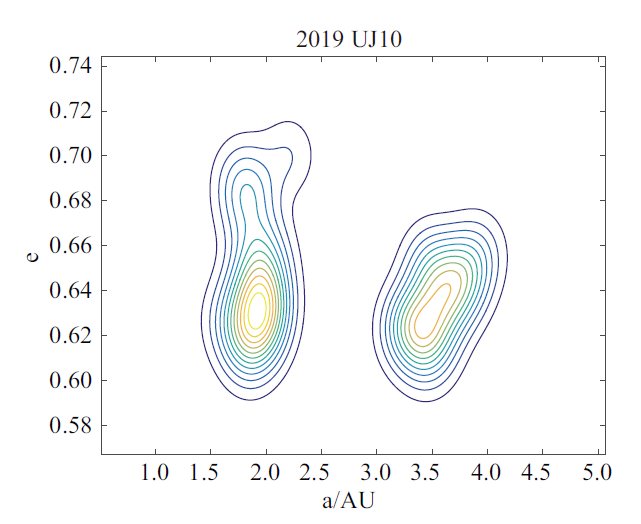
2011 FS2����������Ĺ۲�����, ��2019 UJ10ƫ���ʽϴ�,���ڸ����ܶȷֲ�ͼ�ϵľۼ�������������. ��˽������Ľ�ռ������С,����㷨��������, �ٴν�������. ��4���г���2011 FS2�ֱ���$e\in[0.0,0.3]$��$e\in [0.1,0.2]$����Ѱ�Ľ��, ��Ϊ��ֵ��С��5����.���Կ������������������С, ����Ч�ʵõ����, ���Ž�Ĵ��ڱ��Գ���. ��2019UJ10�������ռ���С��$e\in [0.6,0.7]$�õ���ͼ6�ĸ����ܶȷֲ�ͼ. ��֪,��Ȼ������һ�����Ž�Ĵ���, ���㷨������������ʵ��Ĵ�������,�����ڴ˷�Χ�ڳ��־ۼ�״. ����㷨�ڼ����ƫ���ʼ����̻��εĹ��ʱ,�����ռ�����ʵ���Ǵ��ڵ�, ֻ���ڴ�Χ�����в����ѵ�, �ۼ��ֲ�������.����ʱ����ͨ�����������Լ������, �ֶμ������Ž�,������㷨�������ȼ���������, �����ۼ��̶�, ͬʱ, ������Ͻ�ķֲ��ۼ��������ֵ���ŵĸ��忼��.
Table 4
��4
��4����2011 FS2�������
Table 4
 |
�´��ڴ�|����CSV
ͼ6
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ6$e\in [0.6,0.7]$�����ܶȷֲ�ͼ
Fig. 6Probability density of $e\in [0.6,0.7]$
��ͬ�����������Ӱ�첻ͬ,�Զ���ģ�����ݼ�������۲������DE�㷨�½��бȽ�. ��5�����˷ֱ����$0.{1}��$, $0.{2}��$����2001FR85, 2006SV189��2019UJ10�Ķ�����. ���Կ�����$0.{1}��$�������,�Կɵõ���Ч�Ķ�����. ���������$0.{2}��$ʱ, ��ķֲ��Ժ�����ʵ��,����ʾ�����Ϣ�IJο���Χ, ������ƫ��������, �����Ӱ��Ҳ������,��ƫ���ʵĹ�����������ܵ�����Ӱ��.ͼ7������Լ����ռ�����$0.{2}��$����2011 FS2�ĸ����ܶȷֲ�ͼ,�Ǻű�ʾ��ʵ������λ��, �ڼ��������ķֲ��Ը�����ʵ��.
Table 5
��5
��5�������Ķ�����
Table 5
 |
�´��ڴ�|����CSV
ͼ7
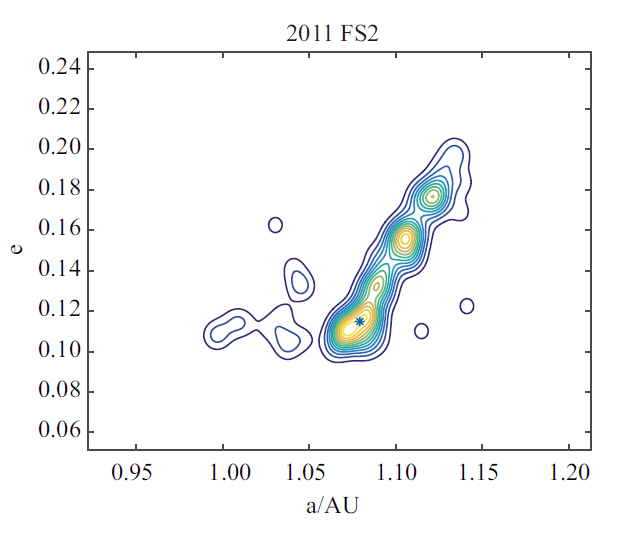 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ7����$0.{2}��$���2011 FS2�ĸ����ܶȷֲ�ͼ
Fig. 7Probability Density of 2011 FS2 with $0.{2}��$ error
5 ����
���̻�����������þ��䷽�����ںܴ�����, �������õ���Ч��,����DE�㷨���ڵĽ����㷨����һ������������, �����˾��䷽�����еIJ�̬��,����DE�㷨��������, �������, ����ʵ��. �����㷨�����ܻ���һ��,ֻ�ǽ������ƺͲ��ز�ͬ, ���ڲ�ͬ�����������ò�ͬ�����㷨ʱ������Ϊ���,��EDA������ע����������, DE�㷨��ע�ؾֲ�����,���ò�ͬ�����㷨ʱ�����ܿɱ��ֲ���.���ݽ����㷨���ص�, ����Ӧ���ڽ���С���ǵļ��̻��������̽��.����Сƫ���ʹ��,DE�㷨��������3����������ݵõ��Ĺ����Ϣ�����ö����վ�����µ���Ϣһ��,��Ϊ���������ṩ�ɲο�����Ϣ. ���ڸ��ӵĴ�ƫ���ʹ���ͻ��θ��̵Ĺ��,�����㷨�ı��ֲ���Сƫ���ʹ��������, ���������Ƚ���, �������������Ž�,���ھֲ��������Ž�ۼ�������. ���, ��Ҫ��С�����ռ�����㷨������,����Ϸֲ��������ֵ���Ž�������. ��������, ��С�����Զ�����Ӱ���С,�����������, ������ֵ���Ž��ܵ�����, �����ƫ���ʹ���Ķ�����Ӱ��ϴ�,��ķֲ��Ժ�����ʵ����������.
С���ǹ����Ϊ����, ��ƫ���ʹ�������϶�,����ʵ�ʹ۲��й۲�λ�ò�ͬ�����������λ�ò�ͬ, Ҳ����㷨����Ӱ��,������ڼ��̻���������, ����������, �۲����ݲ��������Ӱ������ɺ���.��ģ�����ݵ��о�������, δ����Թ۲�λ�ú�ʱ������һ���о�,�ڲ�ͬ����·������, ����㷨�ڴ�ƫ�����µ�����Ч��,���ƽ����㷨��С���Ǽ��̻����췽���Ӧ��.
�ο����� ԭ��˳��
������ȵ���
������������
�����ڿ�Ӱ������
DOIURLPMID [��������: 1]

The Cretaceous-Paleogene boundary approximately 65.5 million years ago marks one of the three largest mass extinctions in the past 500 million years. The extinction event coincided with a large asteroid impact at Chicxulub, Mexico, and occurred within the time of Deccan flood basalt volcanism in India. Here, we synthesize records of the global stratigraphy across this boundary to assess the proposed causes of the mass extinction. Notably, a single ejecta-rich deposit compositionally linked to the Chicxulub impact is globally distributed at the Cretaceous-Paleogene boundary. The temporal match between the ejecta layer and the onset of the extinctions and the agreement of ecological patterns in the fossil record with modeled environmental perturbations (for example, darkness and cooling) lead us to conclude that the Chicxulub impact triggered the mass extinction.
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 3]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 3]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
ϡ����������µ��������ȷ��������Ҫ��Ӧ�ü�ֵ����Եػ�Laplace��Gauss��������� ϡ�����������д��ڵIJ�������ƽ�������⣬�����һ���µ�ģ�͡���˫���Ѫ�����ģ�� ���о����Ż��㷨�еı�߶ȷ������Ŵ��㷨��Ϊ�����㷨���������˷��档��������� ˫���Ѫ�����ģ�Ϳ��ԽϺõؽ���ػ�������������������Ӧ���е��������⣬���ñ�� �ȷ���˫���Ѫ�����ģ�;���90�����ϵĽ���ɹ��ʣ��Ҿ������õĽ����ٶȺ������ԣ� �����øĽ����Ŵ��㷨���Խ����������������߽��ʹ�ÿ��Դﵽ�Ϻõij�����Ч����
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 2]
//
[��������: 1]
[��������: 3]
[��������: 1]
[��������: 1]
[��������: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}