HTML
--> --> -->Previous studies have considered the predictability of warm and cold events from both qualitative and quantitative perspectives (e.g. Leith, 1978; Chen et al., 1995; Dambacher et al., 2003; Tang et al., 2008; Li and Ding, 2011). Quantitative estimations of the predictabilities of warm and cold events are at the frontier of climate science. Some early studies employed an error doubling-time method to determine the limit of atmospheric predictability. In this method, the predictability limit is defined as the time required for small initial errors to double in size (Leith, 1965; Charney, 1966; Mintz, 1968; Smagorinsky, 1969; Lorenz, 1982). However, some researchers have pointed out that this method is affected by the numerical model being assessed (e.g., Lorenz, 1996), and the error doubling time decreases for numerical models with greater complexity and higher resolution. Dalcher and Kalnay (1987) proposed the saturation of the root-mean-square error as an indicator of predictability. However, this method also depends on the numerical model being employed. Model deficiencies have limited the widespread application of the above methods. In addition to these methods, the global Lyapunov exponent (Eckmann and Ruelle, 1985; Wolf et al., 1985; Fraedrich, 1986, 1987) and local Lyapunov exponent methods (Nese, 1989; Yoden and Nomura, 1993; Ziehmann et al., 2000) have been used to quantitatively estimate the limit of atmospheric predictability. However, these two methods assume linear error growth, whereas the atmosphere is a chaotic system for which error growth is affected by nonlinear processes. This makes existing methods less-than-ideal for predictability assessments (Mu et al., 2003). Ding and Li (2007) introduced the nonlinear local Lyapunov exponent (NLLE) method to estimate the predictability limits of the atmosphere. This method accounts for nonlinearity and provides more accurate estimates of predictability limits than methods based on the theory of linear error growth. However, this method cannot provide the maximum prediction lead time for specific states. Following the work of Ding et al. (2008), Li et al. (2019) proposed the backward nonlinear local Lyapunov exponent (BNLLE) method to estimate the maximum prediction lead time of specific states. The BNLLE method differs from traditional methods, which quantify the prediction time from a given initial state to a future state. It can estimate the prediction lead time of a specific state. Hence, the BNLLE method is particularly suited to investigations of the predictability of extreme events. The BNLLE method introduces a new means by which modelers who employ general circulation models can study the predictability of extreme events. Apart from the BNLLE method, previous studies (Mu et al., 2002; Duan and Mu, 2005; Duan and Luo, 2010) have estimated the maximum prediction lead time of events based on the conditional nonlinear optimal perturbation (CNOP) method.
This work applies the BNLLE method to an estimation of the maximum prediction lead times of warm and cold events. The relative difficulties in predicting warm and cold events are explored by comparing the predictability limits obtained using the BNLLE method. The remainder of this paper is organized as follows. Section 2 introduces the model and the BNLLE method. A quantitative estimation and comparison of the predictabilities of warm and cold events are presented in section 3. Finally, section 4 provides a summary of the results.
2.1. Model setup
Lorenz (1963) introduced a simplified model (hereafter referred to as Lorenz63) that applies three ordinary differential equations [Eq. (1)] to study atmospheric predictability:where




2
2.2. Backward nonlinear local Lyapunov exponent method
In an n-dimensional nonlinear dynamical system, the growth of infinitesimal initial errors
where






The NLLE captures the nonlinear growth of initial errors, which represents an advantage over traditional methods used to study the predictability of the atmosphere, which consider only linear error growth. To quantify the predictability of state x(t0) in a chaotic system, several error vectors (Fig. 1) are first superimposed onto x(t0). Then, the error vectors are allowed to evolve in each direction over time


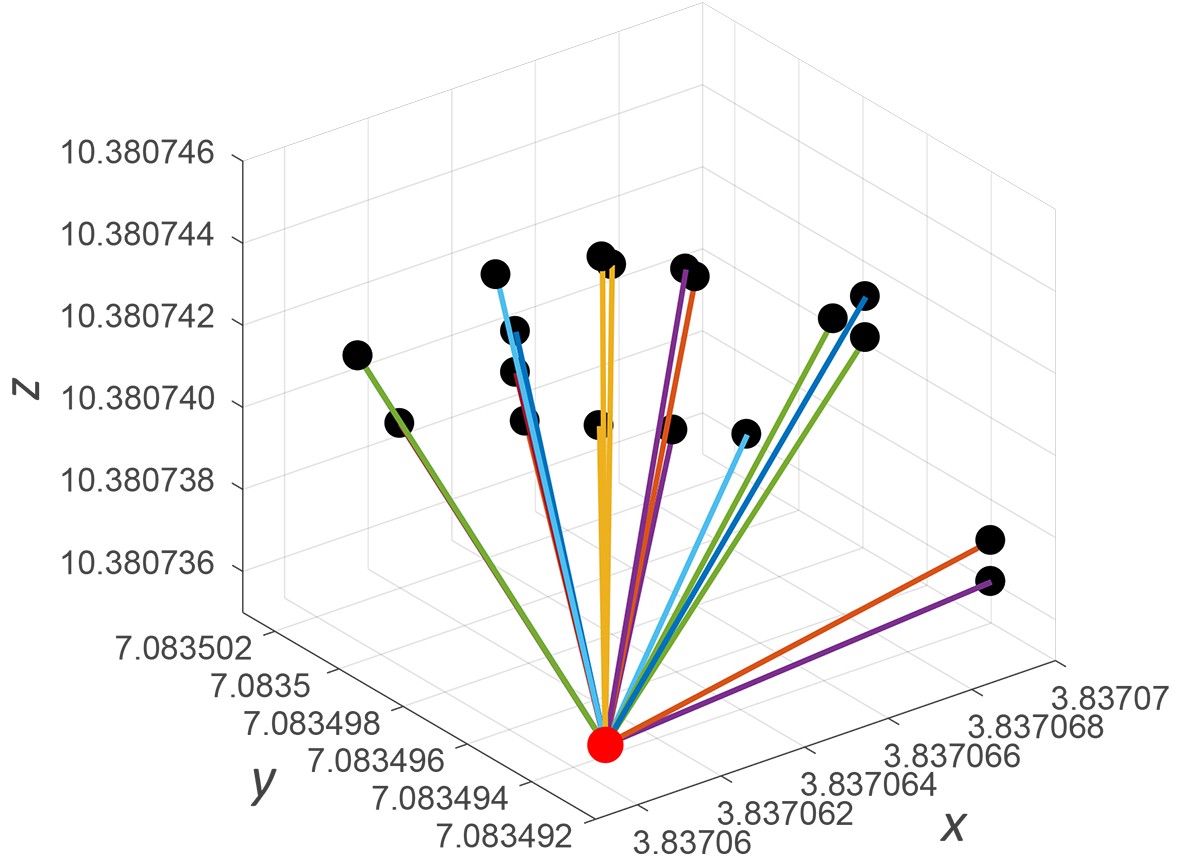 Figure1. Example of 20 error vectors superimposed on the initial state
Figure1. Example of 20 error vectors superimposed on the initial state 

where

In climate science, the local predictability limit of a single state x(t0) can be represented by the time taken by initial errors to reach saturation. When the error saturates, all information of the initial state x(t0), along with predictability, is lost. Thus, the local predictability limit can be determined once

To estimate the maximum prediction lead time for specific final states, Li et al. (2019) proposed the BNLLE method, which is based on the NLLE method. Assume a set of time series data [ x(










Unlike the NLLE method, the BNLLE method is used to calculate the maximum prediction lead time of given states by backward searches for corresponding initial states. Figure 2 shows the maximum prediction time and maximum prediction lead time for state x(














 Figure2. Schematic of the maximum prediction lead time (dashed line) and maximum prediction time (solid line) for state
Figure2. Schematic of the maximum prediction lead time (dashed line) and maximum prediction time (solid line) for state 





3.1. Definition of warm and cold events
Evans et al. (2004) classified the Lorenz attractor into warm and cold regimes, and studied when regime change occurs and the time spent in one regime. Warm and cold regimes represent warm and cold weather, respectively, in the real atmosphere. Figure 3 shows the warm and cold regimes of the Lorenz attractor projected on the x?y plane. For the warm regime, x and y are both greater than zero, whereas for the cold regime x and y are both less than zero. States corresponds to weather events. Of the 40 000 states, there are 17 292 states in the warm regime (i.e., warm events) and 18 534 states in the cold regime (i.e., cold events). The other 4174 states are in the regime transition region. In this work, we generate 10 000 initial error vectors randomly superimposed on each state x(
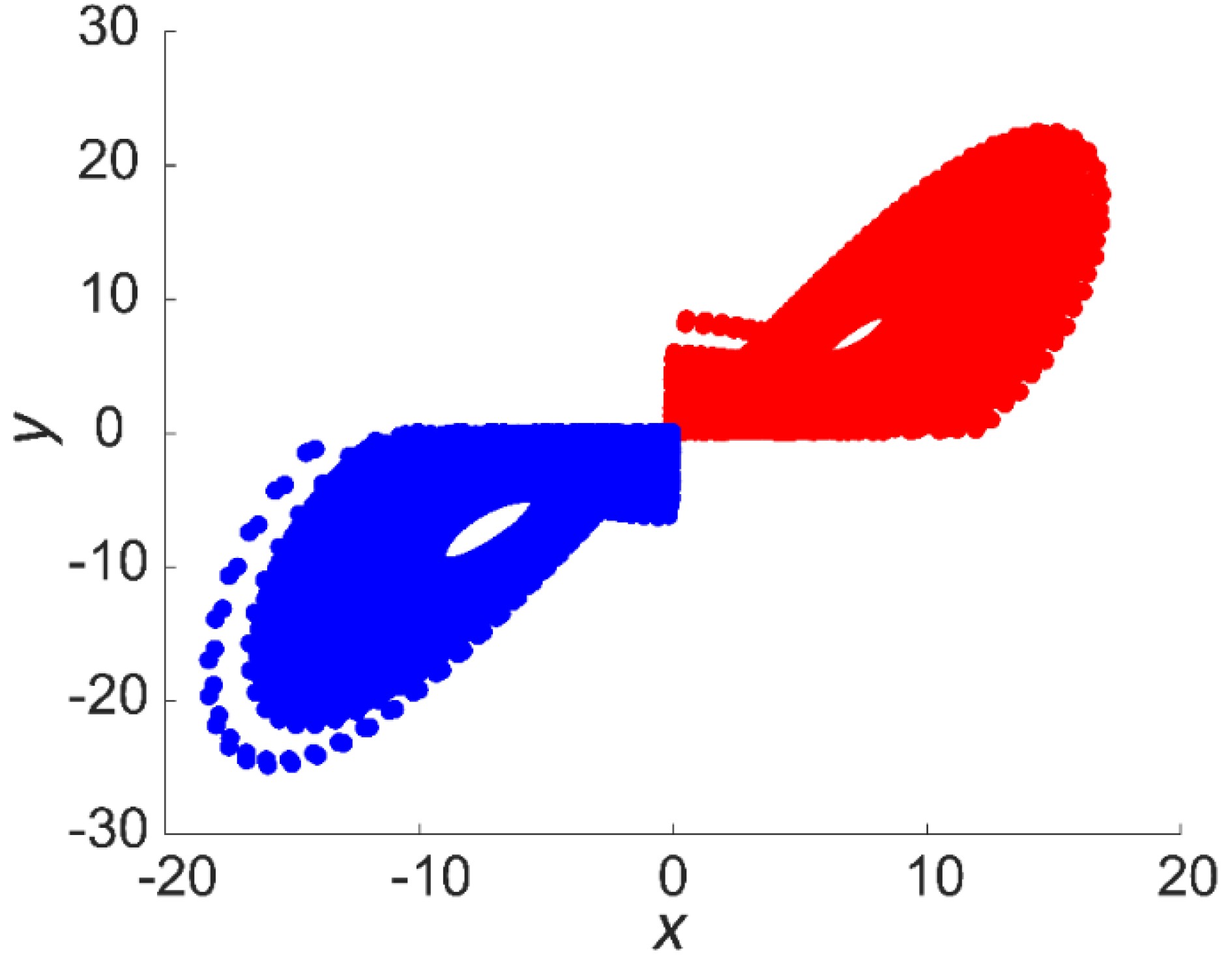 Figure3. Warm (red) and cold (blue) regimes projected on the x?y plane of a Lorenz attractor.
Figure3. Warm (red) and cold (blue) regimes projected on the x?y plane of a Lorenz attractor.2
3.2. Maximum prediction lead times of warm and cold states
The initial error magnitude of the Lorenz63 model is set to 10?5. We then calculate the maximum prediction lead times for all 40 000 events. Figure 4 shows the spatial distributions of maximum prediction lead times on the Lorenz attractor. Warm events are distributed over the right wing of the Lorenz attractor and cold events are distributed over the left wing. The maximum prediction lead times of warm and cold events present obvious layered structures. The maximum prediction lead times of warm (cold) events on individual circles concentric with the distribution of warm (cold) events are roughly the same. On different circles, the maximum prediction lead times are different. In addition, we find that the maximum prediction lead times of warm and cold events are similar overall, with small differences. In this work, the parameter r is 28 which is larger than 1. So the Lorenz attractor has three unstable stationary points (Mukougawa et al., 1991, Mu et al., 2002). One unstable stationary point is the origin (0, 0, 0). The other two unstable stationary points are located on (

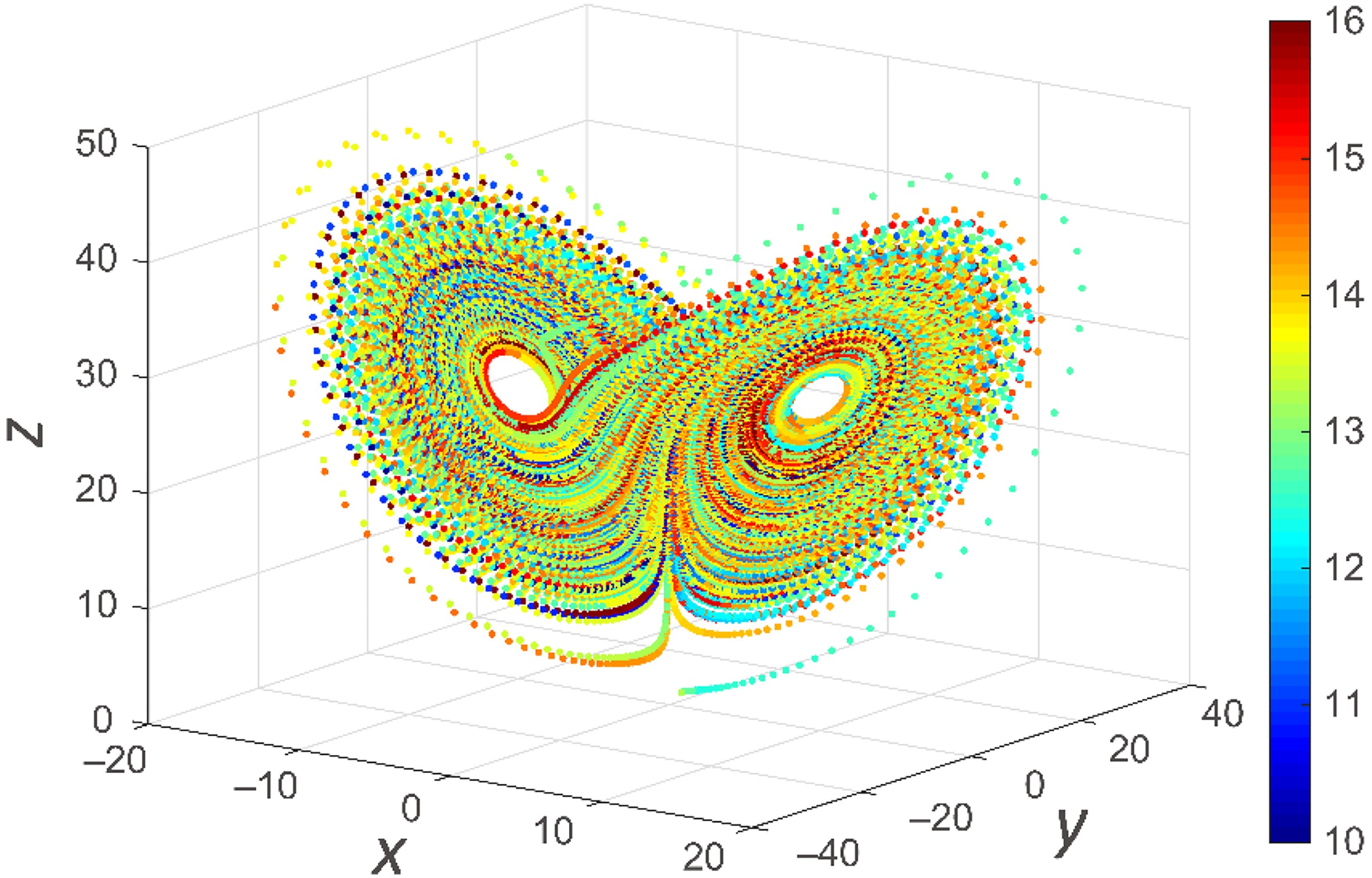 Figure4. Spatial distributions of maximum prediction lead times for warm and cold regimes with initial error magnitudes of 10?5.
Figure4. Spatial distributions of maximum prediction lead times for warm and cold regimes with initial error magnitudes of 10?5.2
3.3. Comparison of maximum prediction lead times of warm and cold states
To further investigate which type of event is more predictable, we apply statistical information for the maximum prediction lead times of warm and cold events (Table 1). Figure 5 is a boxplot of maximum prediction lead times for warm and cold events. The largest of the maximum prediction lead times of the 17 292 warm events is slightly lower than that of the 18 534 cold events. The other four statistical variables [the first quartile (Q1), median value (Q2), the third quartile (Q3), and minimum value] of warm events are all higher than those of the cold events, indicating that warm events are more predictable than cold events.| Minimum | Q1 | Median | Q3 | Maximum | |
| Warm | 10.99 | 12.94 | 13.61 | 14.24 | 16.19 |
| Cold | 10.02 | 12.42 | 13.29 | 14.02 | 16.42 |
Table1. Statistical information for the maximum prediction lead times of warm and cold events.
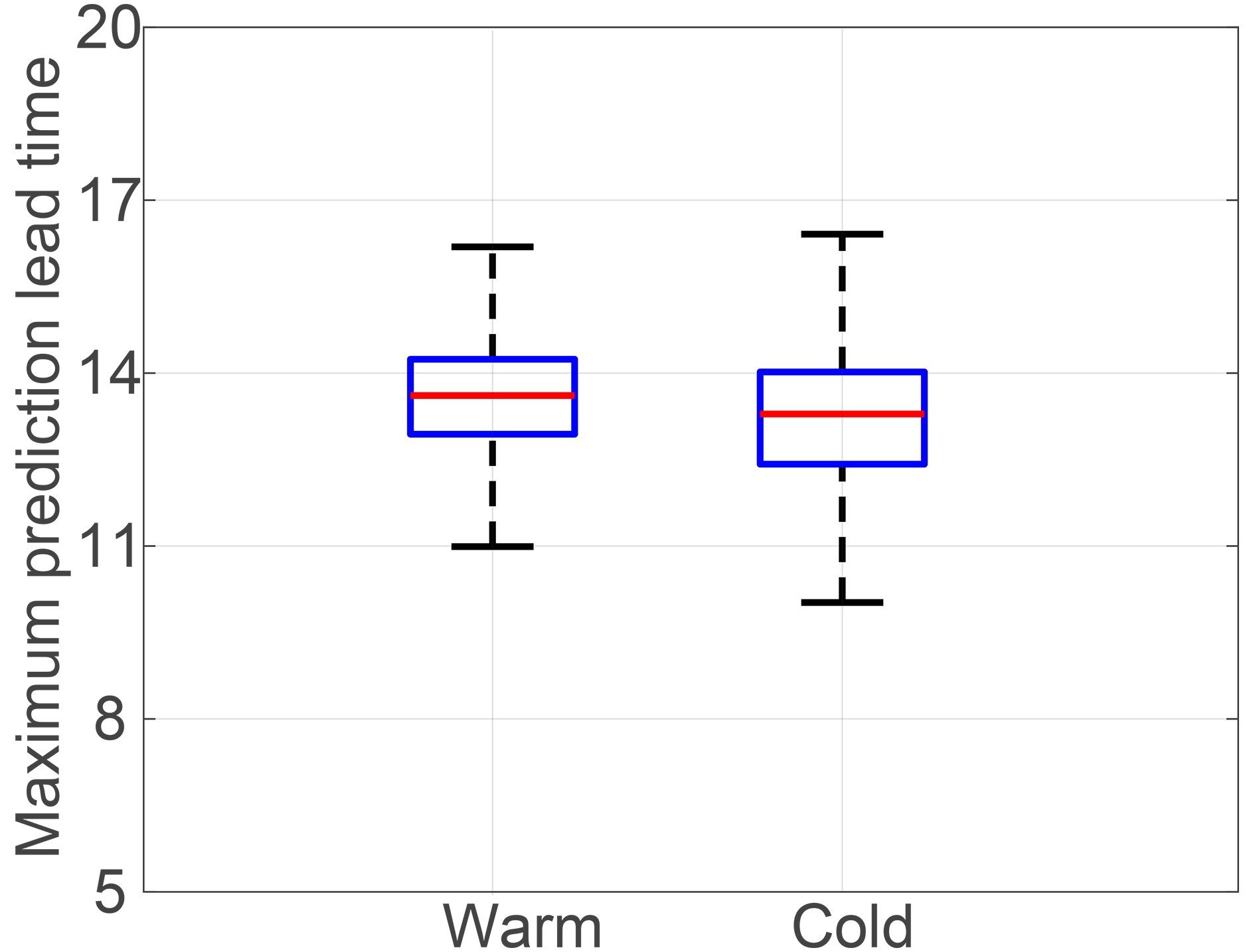 Figure5. Boxplot of the maximum prediction lead time of warm and cold events with initial error magnitudes of 10?5. Red solid lines indicate the median value (Q2). The bottoms and tops of the boxes denote the first quartile (Q1) and third quartile (Q3), respectively. The lower and upper solid horizontal lines represent the minimum value (Q1 ? 1.5IQR) and maximum value (Q3 + 1.5IQR) of the maximum prediction lead times of warm (cold) events, respectively, and IQR = Q3 ? Q1.
Figure5. Boxplot of the maximum prediction lead time of warm and cold events with initial error magnitudes of 10?5. Red solid lines indicate the median value (Q2). The bottoms and tops of the boxes denote the first quartile (Q1) and third quartile (Q3), respectively. The lower and upper solid horizontal lines represent the minimum value (Q1 ? 1.5IQR) and maximum value (Q3 + 1.5IQR) of the maximum prediction lead times of warm (cold) events, respectively, and IQR = Q3 ? Q1.Figure 6 shows probability histograms of maximum prediction lead times of the two types of event under two scenarios with different initial error magnitudes. The maximum prediction lead times of warm and cold events both form Gaussian distributions. Extreme warm and cold events occur with low frequency, and thus extreme maximum prediction lead times are of low probability. For non-extreme events, the probabilities of maximum prediction lead times for warm events are generally higher than those of cold events.
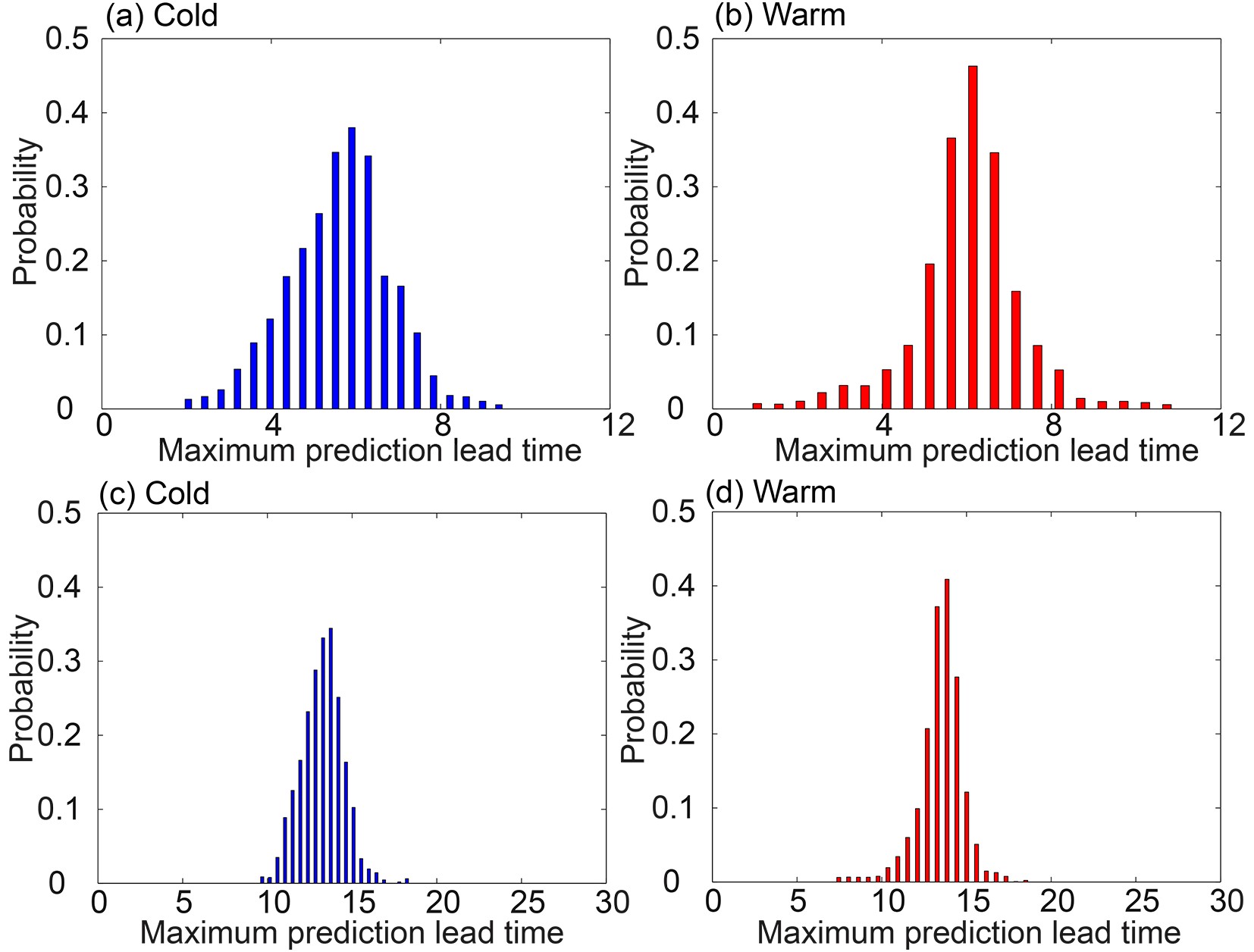 Figure6. Probability histograms for maximum prediction lead times of (a, c) cold and (b, d) warm events with initial error magnitudes of (a, b) 10?2 and (c, d) 10?5.
Figure6. Probability histograms for maximum prediction lead times of (a, c) cold and (b, d) warm events with initial error magnitudes of (a, b) 10?2 and (c, d) 10?5.Figure 7 shows probability distribution function (PDF) curves of maximum prediction lead times for warm and cold events. For both magnitudes of initial error, the probability distributions of maximum prediction lead times for warm events are shifted to longer times compared with those for cold events. The maximum prediction lead times of warm events are thus greater than those of cold events with the same probability. This demonstrates that warm events are more predictable than cold events.
 Figure7. PDF curves of maximum prediction lead times for warm and cold events with initial error magnitudes of (a) 10?2 and (b) 10?5. Blue and red lines represent cold and warm states, respectively.
Figure7. PDF curves of maximum prediction lead times for warm and cold events with initial error magnitudes of (a) 10?2 and (b) 10?5. Blue and red lines represent cold and warm states, respectively.The atmosphere is a complex chaotic system. Warm and cold weather and climate events in the real atmosphere are more complex than those in the Lorenz63 model. In future work, we will apply the BNLLE method to the real atmosphere and further explore the relative difficulty of forecasts of warm and cold weather and climate events.
Acknowledgements. This work was jointly supported by the National Natural Science Foundation of China (Grant No. 41790474) and the National Program on Global Change and Air?Sea Interaction (GASI-IPOVAI-03 GASI-IPOVAI-06).
