Real-Time Estimation of Citrus Canopy Volume Based on Laser Scanner and Irregular Triangular Prism Module Method
LI Peng1, ZHANG Ming1,2, DAI XiangSheng3, WANG Teng1, ZHENG YongQiang1, YI ShiLai1, Lü Qiang,11 Citrus Research Institute, Southwest University, Chongqing 400712 2 College of Engineering and Technology, Southwest University, Chongqing 400716 3 Jinggang Honey Pomelo Research Institute, Jinggangshan Agricultural Science and Technology Park, Ji’an 343016, Jiangxi
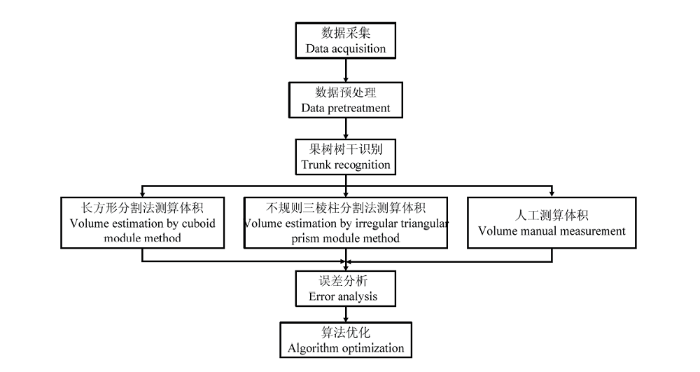
Abstract 【Objective】Accurate measurement of volume and structure of fruit tree canopy can provide important reference for variable application of pesticide and fertilizer, as well as yield estimation. In order to accurately measure the canopy volume, a scanning platform based on laser sensor (LMS111-10100, SICK) was built. Aiming at the problem of irregular canopy shape, the poor accuracy of the existing real-time measurement methods of canopy volume and difficult to measure and estimate the canopy volume, a new estimation method based on irregular triangular prism modules was proposed in this work. 【Method】Five spherical landscape trees with regular canopy and ten citrus trees with irregular canopy were scanned by the laser sensor at the speeds of 0.5, 1.0 and 1.5 m·s -1, respectively. The canopy volume was measured by two methods: cuboid module method (CMM) and irregular triangular prism module method (ITPMM), and the error analysis was conducted based on manual measurement. 【Result】 The results showed that the error ranges of CMM for measuring landscape trees at the different speeds of 0.5, 1.0 and 1.5 m·s -1were 4.17%-6.59%, 4.56%-7.42% and 4.17%-9.86%, respectively, while the error ranges of the ITPMM for measuring landscape trees were 2.37%-4.63%, 3.18%-5.00% and 4.10%-5.73%, respectively. The distance range of the relative error of the two methods for measuring citrus trees was -0.28%-4.22%%, and the average difference was 1.78%. The error ranges of CMM for measuring citrus trees at the different speeds of 0.5, 1.0 and 1.5 m·s -1 were 11.63%-31.02%, 11.88%-33.23% and 13.28%-33.30%, respectively. The error ranges by ITPMM for measuring citrus trees were 3.25%-6.69%, 4.50%-8.31% and 5.66%-11.55%, respectively. The distance range of the relative error of the two methods for measuring citrus trees was 6.43%-26.20%, and the average difference was 13.04%. 【Conclusion】 The research showed that the estimation error of the ITPMM was significantly smaller than the CMM. For the same target, when the speed was 0.5 m·s -1, both of the estimation accuracy for the two methods were the highest. As the sensor speed increased, laser scanning points on the canopy decreased. So, the relative error of volume estimation increased with increase of advance speed of the laser sensor. When scanning the regular target, the accuracy difference between the two methods was small; when scanning the irregular target, the error of the CMM was larger. The processing time of a frame laser data by the CMM was 2.86 ms, and the processing time by the ITPMM was 4.73 ms, which were less than the scanning period of 20 ms of the laser sensor. The data processing time could match the acquirement of real-time collection and processing of laser data. Keywords:canopy volume;laser scanning;irregular triangular prism module method;real-time detection;trunk recognition
PDF (2921KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 李鹏, 张明, 戴祥生, 王腾, 郑永强, 易时来, 吕强. 基于不规则三棱柱分割法实时测算果树冠层体积[J]. 中国农业科学, 2019, 52(24): 4493-4504 doi:10.3864/j.issn.0578-1752.2019.24.005 LI Peng, ZHANG Ming, DAI XiangSheng, WANG Teng, ZHENG YongQiang, YI ShiLai, Lü Qiang. Real-Time Estimation of Citrus Canopy Volume Based on Laser Scanner and Irregular Triangular Prism Module Method[J]. Scientia Acricultura Sinica, 2019, 52(24): 4493-4504 doi:10.3864/j.issn.0578-1752.2019.24.005
(a)景观树;(b)柑橘树;(c)景观树激光点云图;(d)柑橘树激光点云图;(e)景观树深度图;(f)柑橘树深度图 Fig. 7Color images, laser point cloud images and depth images of landscape tree and citrus tree
(a) Landscape tree; (b) Citrus tree; (c) Laser point cloud image of landscape tree; (d) Laser point cloud image of citrus tree; (e) Depth image of landscape tree; (f) Depth image of citrus tree
WANG WZ, HONG TS, LIJ, ZHANG FG, LU YC . Review of the pesticide precision orchard spraying technologies Transactions of the Chinese Society of Agricultural Engineering, 2004,20(6):98-101. (in Chinese) [本文引用: 1]
ZHOU LF, XUE XY, ZHOU LX, ZHANGL, DING SM, CHANGC, ZHANG XJ, CHENC . Research situation and progress analysis on orchard variable rate spraying technology Transactions of the Chinese Society of Agricultural Engineering, 2017,33(23):80-92. (in Chinese) [本文引用: 1]
FOX RD, DERKSEN RC, ZHUH, BRAZEE RD, SVENSSON SA . A history of air-blast sprayer development and future prospects Transactions of the ASABE, 2008,51(2):405-410. [本文引用: 1]
FENG ZK, LUOX, MA QY, HAO XY, CHEN XX, ZHAO LG . An estimation of tree canopy biomass based on 3D laser scanning imaging system Journal of Beijing Forestry University, 2007,29(S2):52-56. (in Chinese) [本文引用: 1]
QIUW, GU JB, DING WM, Lü XL, SUN CD, LUJ . Experiment on control effect of different pesticide concentration using air-assisted sprayer Transactions of the Chinese Society for Agricultural Machinery, 2015,46(1):94-99. (in Chinese) [本文引用: 1]
QIU BJ, YANR, MAJ, GUAN XP, OU MX . Research progress analysis of variable rate sprayer technology Transactions of the Chinese Society for Agricultural Machinery, 2015,46(3):59-72. (in Chinese) [本文引用: 1]
翟长远, 赵春江, WANG N, JOHN L, 王秀, PAUL W, 张海辉 . 果园风送喷雾精准控制方法研究进展 农业工程学报, 2018,34(10):1-15. [本文引用: 1]
ZHAI CY, ZHAO CJ, WANGN, JOHNL, WANGX, PUALW, ZHANG HH . Research progress on precision control methods of air-assisted spraying in orchards Transactions of the Chinese Society of Agricultural Engineering, 2018,34(10):1-15. (in Chinese) [本文引用: 1]
LIUH, XIAW, SHENY, LIN, XUH . Development overview of precision variable spraying based on real-time sensor technology Journal of Chinese Agricultural Mechanization, 2016,37(3):238-244. (in Chinese) [本文引用: 1]
YUL, HUANGJ, ZHAO ZX, ZHANGL, SUN DZ . Laser measurement and experiment of hilly fruit tree canopy volume Transactions of the Chinese Society for Agricultural Machinery, 2013,44(8):224-228. (in Chinese) [本文引用: 1]
BERKP, HO?EVARM, STAJNKOD, BELSAKA, HOCEVARM . Development of alternative plant protection product application techniques in orchards, based on measurement sensing systems: A review Computers and Electronics in Agriculture, 2016,124:273-288. [本文引用: 1]
GILE, ARNóJ, LLORENSJ, SANZR, LLOPJ, ROSELL-POLO JR, GALLARTM, ESCOLàA . Advanced technologies for the improvement of spray application techniques in Spanish viticulture: An overview Sensors, 2014,14(1):691-708. [本文引用: 1]
SOLANELLESF, ESCOLàA, PLANASS, ROSELL JR, CAMPF, GRàCIàF . An electronic control system for pesticide application proportional to the canopy width of tree crops Biosystems Engineering, 2006,95(4):473-481. [本文引用: 1]
WANG WZ, HONG TS, LU YC, YUE XJ, ZHANG ZG, JIANG GL . Performance of tree canopy diameter measurement based on ultrasonic sensor and DGPS Transactions of the Chinese Society of Agricultural Engineering, 2006,22(8):158-161. (in Chinese) [本文引用: 1]
HE XK, YAN KR, CHU JY, WANGJ, ZENG AJ, LIU YJ . Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer Transactions of the Chinese Society of Agricultural Engineering, 2003,19(6):78-80. (in Chinese) [本文引用: 1]
李丽, 李恒, 何雄奎ANDREAS H . 红外靶标自动探测器的研制及试验 农业工程学报, 2012,28(12):159-163. [本文引用: 1]
LIL, LIH, HE XK, ANDREASH . Development and experiment of automatic detection device for infrared target Transactions of the Chinese Society of Agricultural Engineering, 2012,28(12):159-163. (in Chinese) [本文引用: 1]
DING WM, ZHAO SQ, ZHAO SQ, GU JB, QIUW, GUO BB . Measurement methods of fruit tree canopy volume based on machine vision Transactions of the Chinese Society for Agricultural Machinery, 2016,47(6):1-10. (in Chinese) [本文引用: 1]
SANZR, ROSELL JR, CALVERAS JL, GILEMARTí SP , Relationship between tree row LIDAR-volume and leaf area density for fruit orchards and vineyards obtained with a LIDAR 3D dynamic measurement system Agricultural & Forest Meteorology, 2013,171/172(3):153-162. [本文引用: 1]
WEI XH, WANG YG, ZHENGJ, WANGM, FENG ZK . Tree crown volume calculation based on 3-D laser scanning point clouds data Transactions of the Chinese Society for Agricultural Machinery, 2013,44(7):235-240. (in Chinese) [本文引用: 1]
OSTERMANA, GODE?AT, HO?EVARM, ?IROKB, STOPARM . Real-time positioning algorithm for variable-geometry air-assisted orchard sprayer Computers and Electronics in Agriculture, 2013,8(7):175-182. [本文引用: 1]
LLORENSJ, GILE, LLOPJ, ESCOLàA . Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: Advances to improve pesticide application methods Sensors, 2011,1(12):2177-2194. [本文引用: 1]
FAN ZM, FENG ZK, ZHENJ, FAN JC, YANF, QIU ZX . Tree crown volume calculation and prediction model establishment using cubic lattice method Transactions of the Chinese Society for Agricultural Machinery, 2015,46(3):320-327. (in Chinese) [本文引用: 2]
CHENY, ZHUH, OZKAN HE . Development of a variable-rate sprayer with laser scanning sensor to synchronize spray outputs to tree structures Transactions of the ASABE, 2012,55(3):773-781. [本文引用: 3]
LI LL, HE XK, SONG JL, WANG XN, JIA XM, LIU CH . Design and experiment of automatic profiling orchard sprayer based on variable air volume and flow rate Transactions of the Chinese Society of Agricultural Engineering, 2017,33(1):70-76. (in Chinese) [本文引用: 1]
CAI JC, WANGX, SONGJ, WANG SL, YANGS, ZHAO CJ . Development of real-time laser-scanning system to detect tree canopy characteristics for variable-rate pesticide application International Journal of Agricultural & Biological Engineering, 2017,10(6):155-163. [本文引用: 3]
LIU JB, LIANG XL, HYYPP?J, YU XW, LEHTOM?KIM, PY?R?L?J, ZHU LL, WANG YS, CHEN RZ . Automated matching of multiple terrestrial laser scans for stem mapping without the use of artificial references International Journal of Applied Earth Observation & Geoinformation, 2017,56:13-23. [本文引用: 1]
LI QJ, ZHANG JQ, ZHOU HP, ZHANGH, SHU YP, XUB . Online measurement of tree canopy volume using vehicle-borne 2-D laser scanning Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):309-314. (in Chinese) [本文引用: 3]
RAHMAN M ZA, GORTE B GH, HILLR . Tree filtering for high density airborne LiDAR data//HILL R, ROSETTE J, SUAREZ J. International Conference on Lidar Applications in Forest Assessment and Inventory. Edinburgh:Heriot-Watt University, 2008: 544-553. [本文引用: 1]
MéNDEZV, ROSELL-POLO JR, SANZR, ESCOLàA, CATALáNH . Deciduous tree reconstruction algorithm based on cylinder fitting from mobile terrestrial laser scanned point clouds Biosystems Engineering, 2014,124(4):78-88. [本文引用: 1]
CHEN YZ, ZHAO LX .Accurate calculation of stack volume based on irregular triangular prism cutting and repairing model. Mine Surveying, 2015(4):29-31. (in Chinese) [本文引用: 1]
LEE KH, EHSANIR . A laser scanner based measurement system for quantification of citrus tree geometric characteristics Applied Engineering in Agriculture, 2009,25(5):777-788. [本文引用: 1]
LIUF, FENG ZK, YANG LY, XU WH, HUANG XD, FENG HY . Estimation of tree crown volume based on 3D laser point clouds data Transactions of the Chinese Society for Agricultural Machinery, 2016,47(3):328-334. (in Chinese) [本文引用: 1]
 ,1
,1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT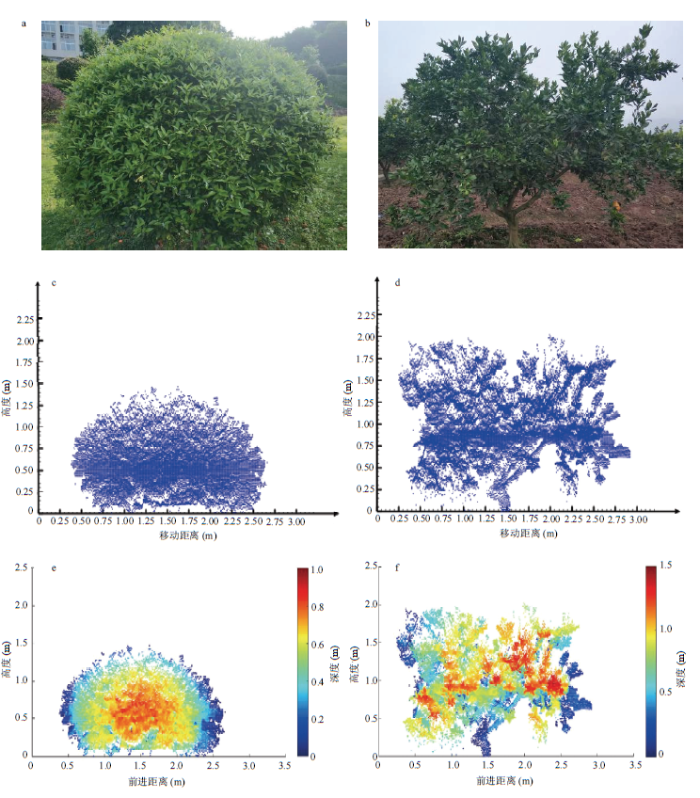 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT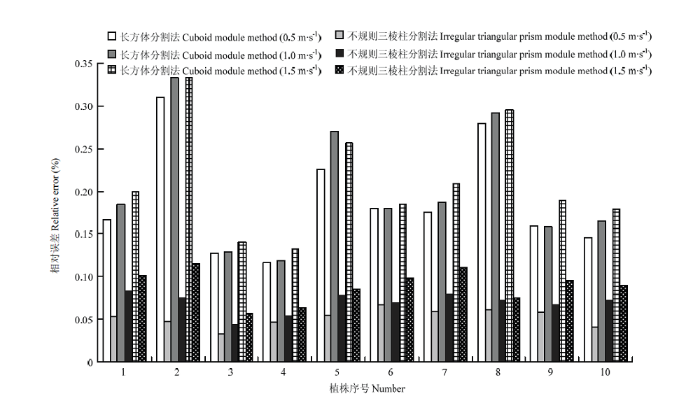 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}