香港中文大學(中大)工程學院領導的研究團隊最近成功研發嶄新的軟體機械人組裝技術,利用數片膠紙和磁性顆粒,通過簡單的黏貼及裁剪,就可以製作出靈活變形、擁有不同功能的小型摺紙式軟體機械人結構。配合不同感測元件模組,這些小型軟體機械人日後將可執行環境感測和醫療等任務,技術亦進一步為發展智能軟體機械人提供組裝基礎。
簡單轉印磁性圖案 摺出立體靈活的軟體機械人
軟體機械人以靈巧、結構多變取勝,能夠抓握物件、輸送靶向藥物等,未來有極大的應用潛力。不過,要解決的問題包括如何將不同功能的元件和物料,與尺寸細小的軟體機械人結合,實現模組化設計,按需要加入及調整其功能;此外,為了達到軟體機械人在磁控下的變形多樣性,磁性顆粒往往需要排列成複雜形狀,對於只有數厘米大的軟體機械人,組裝難度特別大。
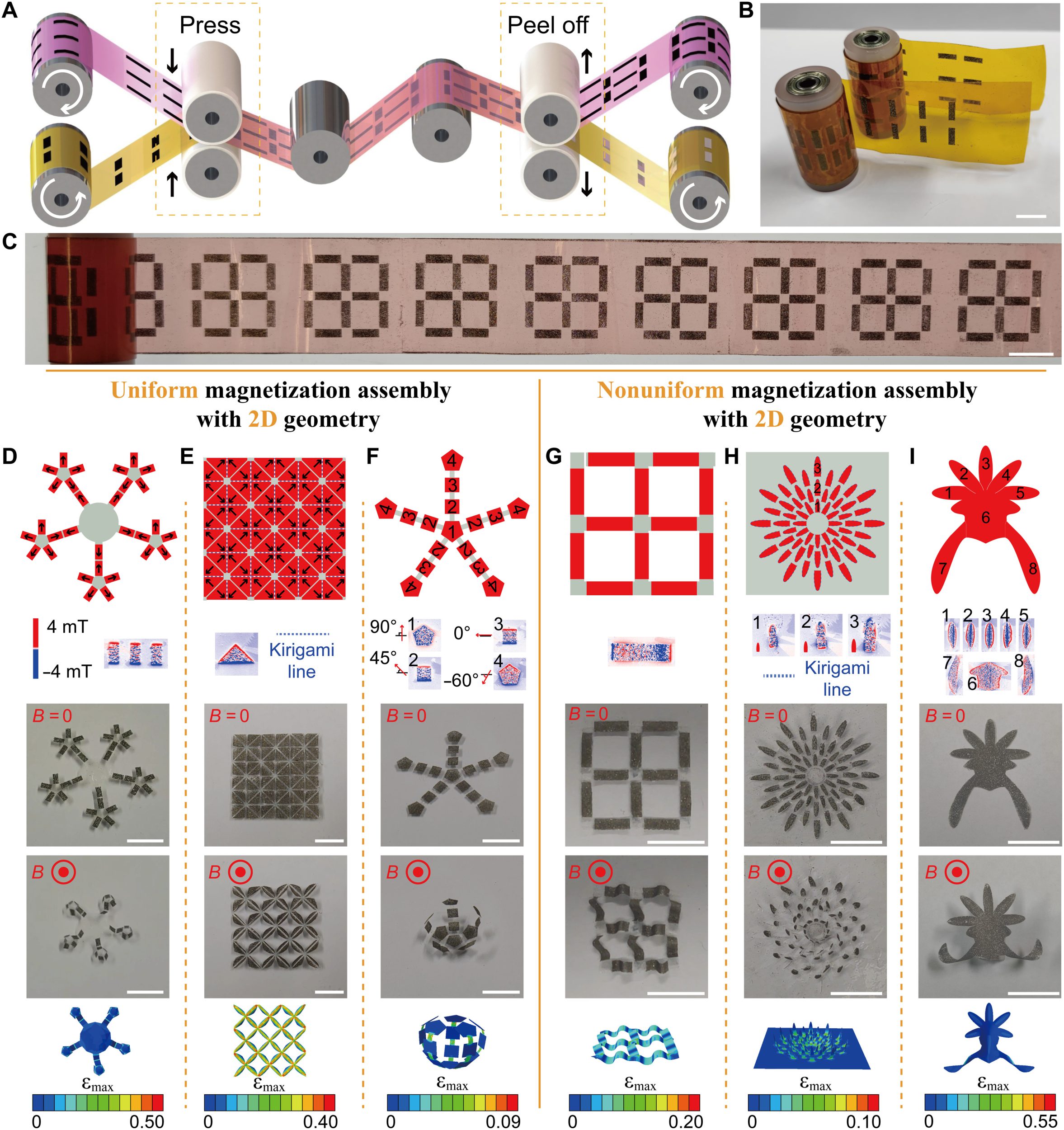
中大機械與自動化工程學系張立教授的研究團隊參考了「紋身貼紙」將膠片上的圖案轉印到皮膚表面的概念,通過多重黏貼去組裝磁性顆粒圖案,完成軟體機械人的編製。他們先將磁性顆粒鋪上生活常見的標籤貼紙(不乾膠),形成模板,再利用黏貼力較強的雙面膠膜,逐層轉移模板上的磁性顆粒圖案,最後利用鐳射將印上完整圖案的雙面膠膜切割。
在磁化作用下,雙面膠膜上的平面圖形可如摺紙般轉換成不同的立體結構,通過調整磁場讓軟體機械人做出折疊、抓取或其他連續性動作。
無縫整合多功能於一身 具醫療工業潛能
由於雙面膠膜具強力黏韌性,有利於將不同性質的物料黏合,無須任何連接工序將不同模組組合起來。研究團隊成功將不同功能的傳感元件無縫合成到小型軟體機械人身上,進行溫度、紫外光、酸鹼值、導電、吸油等感應工作,亦可用於電路修復及治療胃潰瘍。
*模擬實驗在豬肚上進行
張立教授表示:「我們在實驗中示範了小型軟體機械人在體內複雜環境進行特別任務,例如在凹凸不平的胃壁內移動到潰瘍位置,模擬在胃部貼上膠布的動作,若日後能配合藥物使用,或可治療胃部受損情況。此外,軟體機械人未來會進一步整合更多的電子元件,例如矽紅外線LED、電晶體或近場通訊等,提升機械人多功能及智能化水平。」
研究團隊成員包括香港城市大學生物醫學工程學系張甲晨教授及卡尼基美隆大學機械工程系Carmel Majidi教授。他們表示,是次研究成果實現以低成本的方式整合多種功能性組件,並通過新穎的模組化程式設計解決小型軟體機械人研發挑戰,從而實現廣泛性應用。
此研究獲香港研究資助局(RGC)、香港創新科技署(ITC)、裘槎基金會、中大周毓浩創新醫學技術中心、中大天石機器人研究所、中大—中國科學院深圳先進技術研究院機器人與智慧系統聯合實驗室及創新香港研發平台(InnoHK)的醫療機器人創新技術中心(MRC)大力支持。結果已刊登於國際學術期刊《Science Advances》。
研究論文全文:“Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules”
https://www.science.org/doi/10.1126/sciadv.abn8932