1.Beijing Institute of Aerospace Control Devices, Beijing 100039, China 2.Quantum Engineering Research Center, China Aerospace Science and Corporation, Beijing 100094, China
Fund Project:Project supported by the National Defense Basic Scientific Research Program of China (Grant No. JCKY2016601C005) and the National Natural Science Foundation of China (Grant No. 61805006).
Received Date:11 December 2018
Accepted Date:10 March 2019
Available Online:01 May 2019
Published Online:05 May 2019
Abstract:Since its first experimental demonstration in 1995, ghost imaging has attracted a great deal of attention due to its potential applications. In Yanhua Shih’s paper (Meyers R E, Deacon K S, Shih Y H 2011 Appl. Phys. Lett.98 111115; Meyers R E, Deacon K S, Shih Y H 2012 Appl. Phys. Lett.100 131114), he pointed out that " one of the useful features is the turbulence insensitivity of thermal light ghost imaging, i.e., atmospheric turbulence would not have any influence on the ghost images of sunlight”. However, in Jeffrey H. Shapiro’s view (Shapiro J H 2012 arXiv:1201.4513 [quant-ph]), lens-less pseudo-thermal ghost imaging is not immune to spatial resolution loss from the presence of atmospheric turbulence along the propagation paths, unless the source diameter is less than the source-plane turbulence coherence length. In the present paper, we find that the second order self-correlation of sunlight intensity is the case that can be satisfied with both theories of Shih and Shapiro. In this paper, the second order self-correlation of sunlight intensity (the intensity variance of the images acquired by the CCD camera), rather than the total intensity correlation between images and bucket detector signals (the traditional ghost imaging method), is calculated to recover the high-quality images in turbulent atmosphere under a few hundred measurements. Inspired by Boyd’s paper, titled " thermal ghost imaging with averaged speckle patterns” (Zerom P, Shi Z, O’Sullivan M N, Chan K W C, Krogstad M, Shapiro J H, Boyd R W 2012 Phys. Rev. A86 063817), turbulence insensitivity of sunlight ghost imaging is demonstrated both theoretically and experimentally in this article. It is found that thermal ghost imaging system whose coherence time need not to be controlled to match the speed of the detectors, ghost imaging with sunlight, which has always been considered intriguing and highly desirable, now is realizable. We present theoretical and experimental results showing that a sunlight self-correlation ghost imaging system can produce high-quality images even when it uses an slow detector and passes through the turbulence near ground, as long as the signal variation is predominantly caused by the fluctuation of the sunlight intensity rather than other noise sources. Our scheme can also be used to improve the image quality in other wave bands such as infrared and ultraviolet, in the case where an poor image quality results from the turbulence or other random disturbances on the wavefront. Keywords:self-correlation/ ghost imaging/ turbulent atmosphere
大气湍流随季节和地面温度变化较大, 因此首先对开展实验的时间和地点进行说明. 实验开展时间为2017年11 月16日上午, 空气轻度污染, 实验系统距离地面高度约20 m, 目标物体为北京中央电视塔, 利用商用地图GPS定位, 可获得目标与实验地点距离为$ L = L_{2} = 17.2$ km (图2), GPS误差最大不超过$ \pm$ 20 m, 相比于实验距离L可忽略. 根据公开资料显示, 北京电视塔高度386.5 m, 成像实验的区域为塔尖最高段, 按文献[12]中给出的参数, 塔尖最后三节自下而上直径分别为2, 1和0.75 m. 由于大气湍流将随地面高度H和温度T而变化, 可按实验高度H和温度参数T查看大致的大气湍流结构常数的范围, 根据实验数据20—386.5 m高度, 温度$ T = [-4\;^{\circ}{\rm C}—8\;^{\circ}{\rm C}] $, 大气湍流强度系数数据的变化范围在文献[13]中可查. 图 2 目标物体(成像目标: 北京中央广播电视塔, 200 m附近拍摄图像, 放大区域为成像区域; 在数字地图GPS定位下目标与实验地点距离$L=L_{2}=17.2\ \rm{km}$) Figure2. Target photo is taken from about 200 m. The object is the Beijing Central Radio and TV Tower with the distance from our experimental location is about L = $L_{2}=17.2\ \rm{km}$ measured by GPS in digital map.








 图 1 实验原理示意图
图 1 实验原理示意图






 图 2 目标物体(成像目标: 北京中央广播电视塔, 200 m附近拍摄图像, 放大区域为成像区域; 在数字地图GPS定位下目标与实验地点距离
图 2 目标物体(成像目标: 北京中央广播电视塔, 200 m附近拍摄图像, 放大区域为成像区域; 在数字地图GPS定位下目标与实验地点距离







































































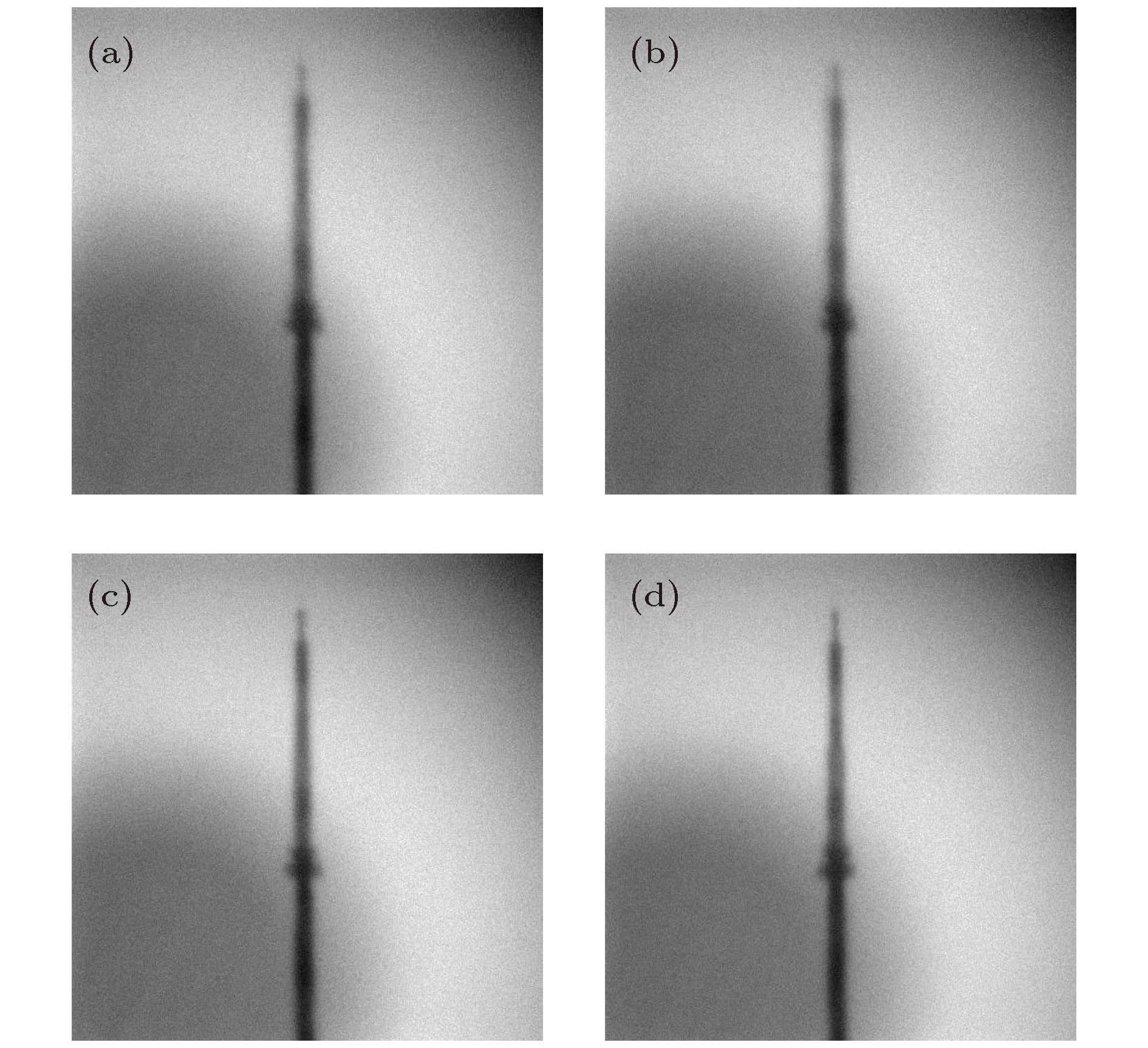 图 3 实验系统中CCD相机拍摄图像 (a), (b), (c)和(d)为不同时间连续拍摄获得
图 3 实验系统中CCD相机拍摄图像 (a), (b), (c)和(d)为不同时间连续拍摄获得
 图 4 实验测试结果 (a) CCD单次曝光成像; (b)测量次数
图 4 实验测试结果 (a) CCD单次曝光成像; (b)测量次数

















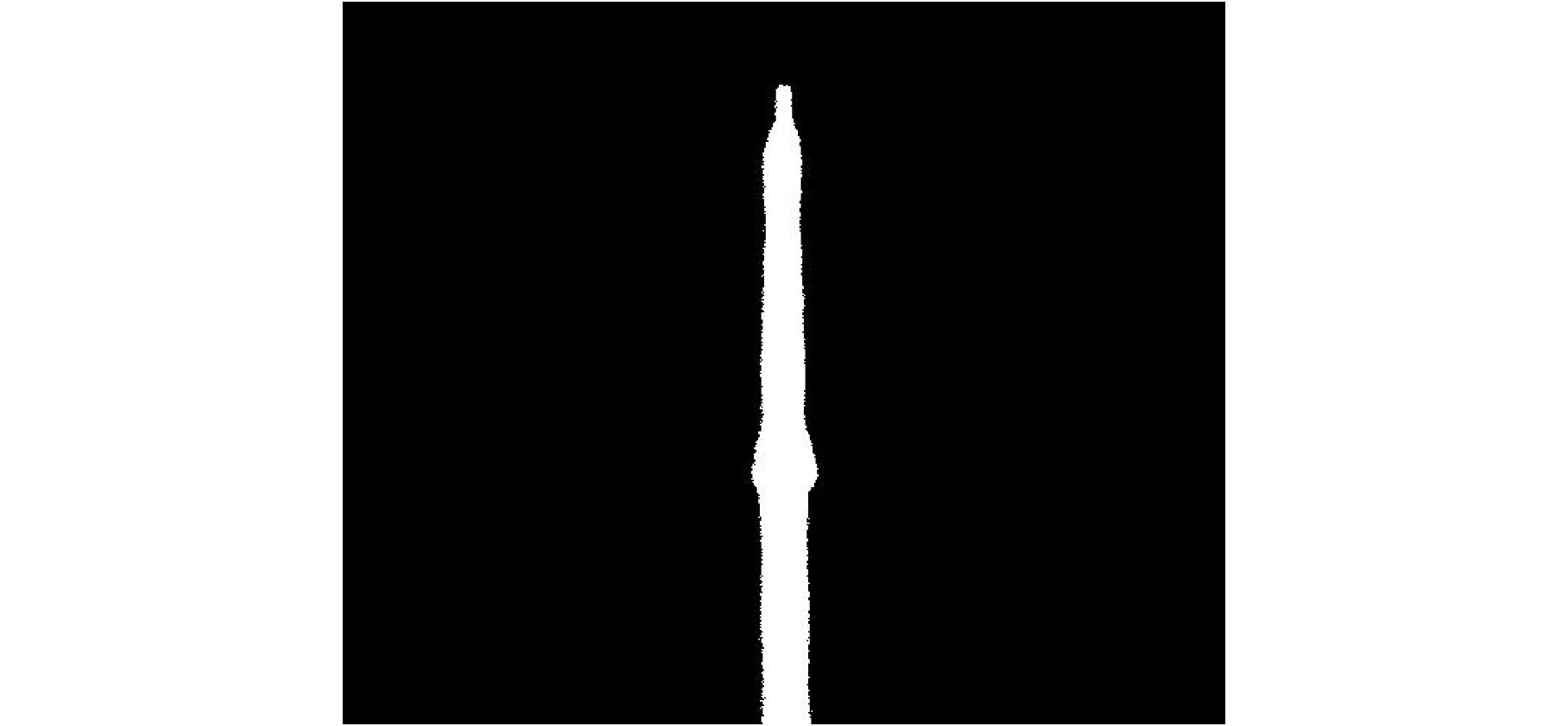 图 5 分离物体与背景的掩模(白色为物体区域, 黑色为背景区域)
图 5 分离物体与背景的掩模(白色为物体区域, 黑色为背景区域)