RESEARCH ON OBLIQUE IMPACT OF ROTATING OF FLEXIBLE BEAM BASED ON CONTACT CONSTRAINT METHOD OF LUGRE FRICTION MODEL1)
Fan Jihua,*,†,2), Gu Tongshun*, Wang Mingqiang*, Shen Hong†, Chen Liwei***School of Mechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, Jiangsu, China †Suzhou Institute of Technology, Jiangsu University of Science and Technology, Zhangjiagang 215600, Jiangsu, China **School of Mechanical Engineering, Wuxi Institute of Communications Technology, Wuxi 214000, Jiangsu, China
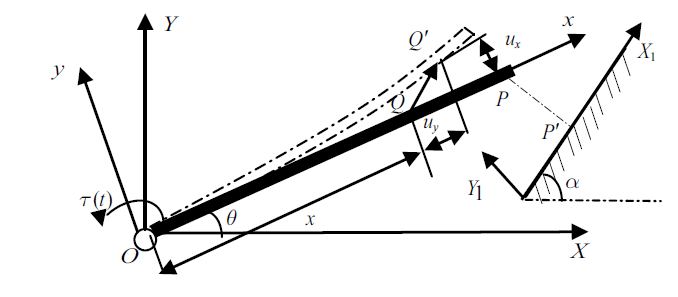
Abstract Based on the contact constraint method and LuGre friction model, the dynamic problem of oblique impact with friction between a flexible beam system and a slope is studied. The rigid-flexible coupling multi-body system dynamics theory is used to discretize and model the flexible beam with large overall motion, at the beginning of the impact, the impulse-momentum method is used to calculate the jumping velocity, and then the contact constraint is introduced in the normal direction to solve the impact force, in tangential direction, LuGre friction model is used to solve the friction force in two ways, the first is that the friction force is calculated by friction coefficient and collision force when sliding, and introducing tangential constraint to calculate Lagrange multiplier response actual friction force, according to the stick / slip switching judgment, the friction force in the impact process is calculated (which is consistent with that calculated by Coulomb friction model); the second method is to calculate the friction force according to friction coefficient of LuGre friction model and normal collision force, so there is no need to switch between stick and slip during impact, and the same friction calculation formula is used. Compared with Coulomb friction model, LuGre friction model is more accurate in describing the tangential friction process. There is no difference between the two LuGre friction model modeling methods to describe the impact dynamics. Therefore, it shows that the establishment of normal contact constraint and LuGre friction model can meet the collision un-embedding situation to avoid stick slip switching and to describe the relatively accurate advantages of friction. Keywords:flexible beam;oblique impact with friction;contact constraint;stick/slip;LuGre friction model
PDF (1003KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 范纪华, 谷通顺, 王明强, 谌宏, 陈立威. 基于LuGre摩擦模型的接触约束法旋转柔性梁斜碰撞研究1). 力学学报[J], 2021, 53(4): 1156-1169 DOI:10.6052/0459-1879-20-350 Fan Jihua, Gu Tongshun, Wang Mingqiang, Shen Hong, Chen Liwei. RESEARCH ON OBLIQUE IMPACT OF ROTATING OF FLEXIBLE BEAM BASED ON CONTACT CONSTRAINT METHOD OF LUGRE FRICTION MODEL1). Chinese Journal of Theoretical and Applied Mechanics[J], 2021, 53(4): 1156-1169 DOI:10.6052/0459-1879-20-350
StolfiA, GasbarriP, SabatiniM, et al. A parametric analysis of a controlled deployable space manipulator for capturing a non-cooperative flexible satellite Acta Astronautica2018: 317-326 DOIURLPMID [本文引用: 1]
(LiHaiquan, LiangJianxun, WuShuang, et al. Dynamics modeling and experiment of a flexible capturing mechanism in a space manipulator Chinese Journal of Theoretical and Applied Mechanics, 2020,52(5):1465-1474 (in Chinese))
(ShenTao, ZhangChongfeng, WangWeijun, et al. Dynamic simulation analysis of capture and buffer system based on claw-type docking mechanism Chinese Journal of Theoretical and Applied Mechanics, 2020,52(6):1590-1598 (in Chinese)) [本文引用: 1]
LiH, YuZ, GuoS, et al. Investigation of joint clearances in a large-scale flexible solar array system Multibody System Dynamics, 2018,44(3):277-292 [本文引用: 1]
(QiuXuesong, RenZhibo, GuiPeng, et al. Dynamic modeling and simulation of a flexible deployable solar array with multiple clearances Journal of Astronautics, 2018,39(7):724-731 (in Chinese)) [本文引用: 1]
TongR, QuanZ, WanQ, et al. A new impact dynamics model of a clearance joint considering the adhesive effects in space environment MATEC Web of Conferences, 2020,306:01005 [本文引用: 1]
(QinRuixian, ZhouJunxian, ChenBingzhi. One-dimensional train collision model based on flexible element and parameters calibration Journal of the China Railway Society, 2019,41(11):58-64 (in Chinese)) [本文引用: 1]
(YuanHan, WangXiaojun, ZhangHongjian, et al. Stability analysis of reusable launch vehicle landing structure Chinese Journal of Theoretical and Applied Mechanics, 2020,52(4):1007-1023 (in Chinese)) [本文引用: 1]
DocquierN, LantsoghtO, DuboisF, et al. Modelling and simulation of coupled multibody systems and granular media using the non-smooth contact dynamics approach Multibody System Dynamics, 2020,49(1):1-22 [本文引用: 1]
(DingQian, ZhaiHongmei. The advance in researches of friction dynamics in mechanics system Advances in Mechanics, 2013,43(1):112-131 (in Chinese)) [本文引用: 3]
QianZ, ZhangD, JinC, et al. A regularized approach for frictional impact dynamics of flexible multi-link manipulator arms considering the dynamic stiffening effect Multibody System Dynamics, 2018,43(3):229-255 [本文引用: 2]
ChenZQ, QianLF. Nonlinear dynamic characteristics analysis of planar flexible rotating beams with clearance joint Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2020,42(6):333
TangL, LiuJ. Frictional contact analysis of sliding joints with clearances between flexible beams and rigid holes in flexible multibody systems Multibody System Dynamics, 2020,49:155-179 [本文引用: 1]
ZhengX, ZhangF, WangQ. Modeling and simulation of planar multibody systems with revolute clearance joints considering stiction based on an LCP method Mechanism and Machine Theory, 2018,130:184-202 [本文引用: 2]
BrogliatoB, KovecsesJ, AcaryV. The contact problem in Lagrangian systems with redundant frictional bilateral and unilateral constraints and singular mass matrix. The all-sticking contacts problem Multibody System Dynamics, 2020,48(2):151-192
WangX, LvJ. Modeling and simulation of dynamics of a planar-motion rigid body with friction and surface contact International Journal of Modern Physics B, 2017,31:16-19
GholamiF, NasriM, KovecsesJ, et al. A linear complementarity formulation for contact problems with regularized friction Mechanism and Machine Theory, 2016,105:568-582 [本文引用: 1]
ZhengX, LiJ, WangQ, et al. A methodology for modeling and simulating frictional translational clearance joint in multibody systems including a flexible slider part Mechanism and Machine Theory, 2019,142:103603 [本文引用: 3]
NanG, LouJ, SongC, et al. A new approach for solving rub-impact dynamic characteristics of shrouded blades based on macroslip friction model Shock and Vibration2020(8):1-9
XuZ, WangQ, WangQ. Numerical method for dynamics of multi-body systems with two-dimensional Coulomb dry friction and nonholonomic constraints Applied Mathematics and Mechanics $($English Edition$)$, 2017,38(12):1733-1752
AghiliF. Energetically consistent model of slipping and sticking frictional impacts in multibody systems Multibody System Dynamics, 2020,48(2):193-209 [本文引用: 2]
KaneTR, LevinsonDA. Dynamics Theory and Applications New York: Mcgraw Hill, 1985 [本文引用: 1]
(LiuZhansheng, ZhangMin, ZhangGuanghui, et al. Characteristics of impact-contact and friction between tips of blades based on LuGre model Journal of Vibration and Shock, 2012,31(12):172-178 (in Chinese)) [本文引用: 1]
MuvengeiO, KihiuJ, Ikua BW, et al. Dynamic analysis of planar rigid-body mechanical systems with two-clearance revolute joints Nonlinear Dynamics, 2013,73(1):259-273
(WangXiaojun, LvJing, WangQi. A numerical method for dynamics of planar multi-rigid-body system with frictional translational joints based on LuGre friction model Chinese Journal of Theoretical and Applied Mechanics, 2019,51(1):209-217 (in Chinese))
(ZhengPeng, WangQi, LüJing, et al. Study on the influence of friction and rolling resistance on the gait of passive dynamic walker Chinese Journal of Theoretical and Applied Mechanics, 2020,52(1):162-170 (in Chinese))
(YangYuwei, LiBin, ZhouHaibo, et al. Dynamic Analysis of a Mobile Parallel Manipulator with Imperfect Kinematic Joints Journal of Mechanical Engineering, 2019,55(15):208-216 (in Chinese)) [本文引用: 1]
QianZ, JinC, ZhangD, et al. Multiple frictional impact dynamics of threshing process between flexible tooth and grain kernel Computers and Electronics in Agriculture, 2017,141:276-285 [本文引用: 1]
DongFX, HongJZ, ZhuK, et al. Numerical and experimental studies on impact dynamics of a planar flexible multibody system Acta Mechanica Sinica, 2010,26(4):635-642 [本文引用: 1]
(DuanYuechen, ZhangDingguo, HongJiazhen. Method for solving the impact problem of a flexible beam with large overall motion Journal of Mechanical Engineering, 2012,48(19):95-102 (in Chinese)) [本文引用: 2]
(QianZhenjie, ZhangDingguo, JinChengqian. Dynamic simulation for flexible multibody systems containing frictional impact and stick- slip processes Journal of Vibration and Shock, 2017,36(23):32-37 (in Chinese))
YuanW, LiL, ZhangDG, et al. New method for oblique impact dynamics research of a flexible beam with large overall motion considering impact friction force Acta Mechanica Sinica, 2016,32(4):720-730 [本文引用: 3]
JohnsonKL. Contact Mechanics. Cambridge: Cambridge University Press, 1985 [本文引用: 1]
LewisAD, RogersRJ. Experimental and numerical study of forces during oblique impact Journal of Sound & Vibration, 1988,125(3):403-412 [本文引用: 1]
 ,*,†,2), 谷通顺*, 王明强*, 谌宏†, 陈立威**
,*,†,2), 谷通顺*, 王明强*, 谌宏†, 陈立威**
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT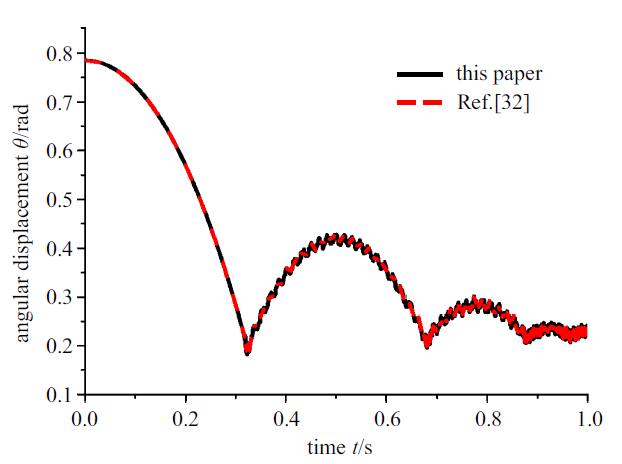 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT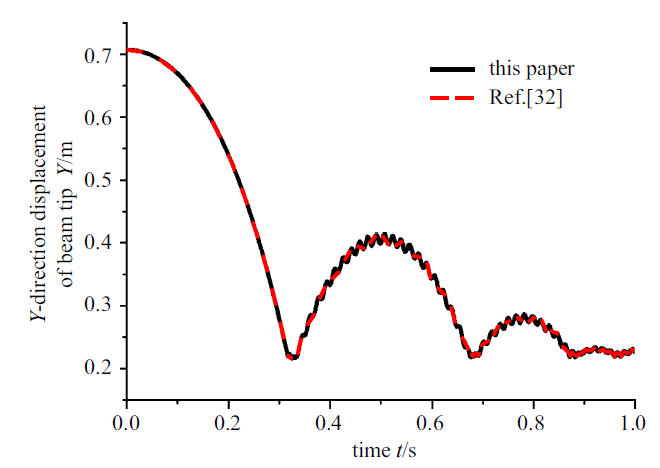 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT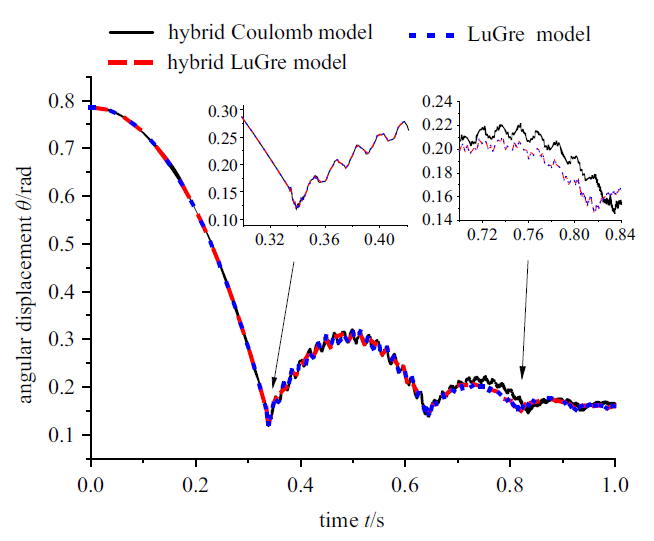 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}