 ,1, 王桂峰2, 丛津桥3, 王向锋4, 魏学文2
,1, 王桂峰2, 丛津桥3, 王向锋4, 魏学文2Salinity Inversion of Severe Saline Soil in the Yellow River Estuary Based on UAV Multi-Spectra
WANG DanYang1, CHEN HongYan,1, WANG GuiFeng2, CONG JinQiao3, WANG XiangFeng4, WEI XueWen2通讯作者:
编委: 杨鑫浩
收稿日期:2018-12-28接受日期:2019-03-5网络出版日期:2019-05-16
| 基金资助: |
Received:2018-12-28Accepted:2019-03-5Online:2019-05-16
作者简介 About authors
王丹阳,E-mail:

摘要
关键词:
Abstract
Keywords:
PDF (5470KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
王丹阳, 陈红艳, 王桂峰, 丛津桥, 王向锋, 魏学文. 无人机多光谱反演黄河口重度盐渍土盐分的研究[J]. 中国农业科学, 2019, 52(10): 1698-1709 doi:10.3864/j.issn.0578-1752.2019.10.004
WANG DanYang, CHEN HongYan, WANG GuiFeng, CONG JinQiao, WANG XiangFeng, WEI XueWen.
0 引言
【研究意义】随着全球气候的变化以及人类活动的干扰,土壤盐渍化仍是全球性最为常见和影响最为广泛的土地退化现象之一[1,2]。据估计,盐渍土占全球整个陆地面积的7.263%,严重影响着当地生态、经济的可持续发展[3]。因此,对盐渍土实施定量、准确监测,对其治理及生态农业建设具有重要意义。【前人研究进展】遥感尤其是高光谱的出现为盐渍土的定量、快速分析提供了一种科学有效的方法。许多****开展了基于地面高光谱进行土壤盐分定量分析的研究,取得了一系列较为理想的研究成果,表明了土壤盐分定量光谱分析的可行性,为土壤盐分定量反演奠定了基础[4,5,6,7,8,9,10,11]。但由于地面光谱数据获得的是点状信息,难以实现大面积区域性土壤盐分含量的及时监测,因此越来越多的****利用卫星遥感数据对土壤盐分信息进行定量反演,基于不同平台的卫星遥感数据源建立了土壤盐分反演模型,在一定程度上实现了土壤盐分的区域定量反演[12,13,14,15,16,17,18,19,20]。但由于卫星影像受时相、天气等因素影响,数据分辨率以及成像质量往往不能够满足地区盐渍土信息准确分析的要求,而且卫星影像的尺度较大、精度较低,尺度内利用同一个反演模型无法满足不同盐渍化程度的精确监测[21]。同时,无人机技术因其成本低、飞行高度可控、不易受天气和地形等环境因素影响等优点已开始被国内外****应用于农业科技中,****们尝试利用无人机携带光谱仪采集近地图像,获取小区域高精度遥感图像,进而准确分析地面监测指标。如HASSANESFAHANI等[22]利用无人机获取可见光、近红外等图像,构建了表层土壤湿度的人工神经网络模型,相关系数可达0.88;王海峰等[23]利用无人机搭载多光谱相机获取土壤水分反射率,建立了不同深度土壤水分的一元回归模型,拟合度均在0.81以上;陈硕博[24]等利用无人机搭载六波段多光谱相机获取小麦冠层反射率,利用其光谱差值反射率与不同深度的土壤差值含水率建立了回归模型,证明了该方法可大面积快速获取田间土壤水分。【本研究切入点】目前无人机技术已较广泛地应用于土壤水分的定量准确遥感分析中[25,26,27,28,29],但应用于盐渍土信息提取的研究较为薄弱,基于无人机多光谱的土壤盐分特征光谱有待探明,土壤盐分的无人机多光谱定量反演模型和技术路线有待分析研究。【拟解决的关键问题】为探明基于无人机多光谱的土壤盐分特征光谱及定量反演模型、技术路线,本文针对重度盐渍土,尝试利用无人机多光谱图像,分别采用相关性分析、灰色关联度分析探明土壤盐分的特征光谱信息,运用多元线性回归(multivariable linear regression,MLR)、支持向量机(support vector machine,SVM)及偏最小二乘(partial least square,PLS)方法构建土壤盐分反演模型,并进行评价、优选,进而实现小区域土壤盐分定量反演,一方面可为土壤定量、准确遥感反演奠定基础,另一方面可为盐渍土治理利用提供数据支持。1 材料与方法
1.1 试验区概况
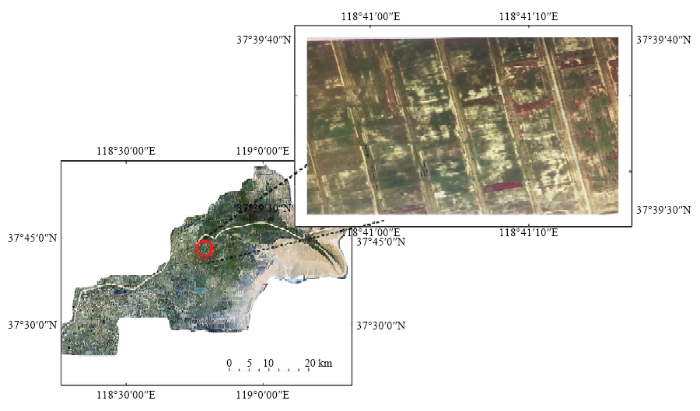
本文以东营市垦利区黄河口镇为试验区域。黄河口镇位于山东省东营市垦利区中部,毗邻黄河口生态旅游区,是黄河的入海口,因“黄河之水天上来,奔流到海不复回”而得名。土壤盐渍化程度较高且土壤季节性返盐与积盐现象较为严重,为中重度盐渍土典型区域。根据黄河口镇土壤类型图、土地利用现状图、土壤盐渍化情况以及无人机实际飞行条件,选择黄河口镇西宋村中心幼儿园以南的重度盐渍土区域为试验区。试验区位于东经118°40′50"—118°50′00",北纬37°39′29"—37°39′40",面积约为24.675 hm2,地形平坦,砂壤土且土质松软,盐渍化程度较为严重(图1)。图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1黄河口镇及试验区空间位置示意图
Fig. 1The spatial location of the Huanghekou town and the experimental area
1.2 数据获取及预处理
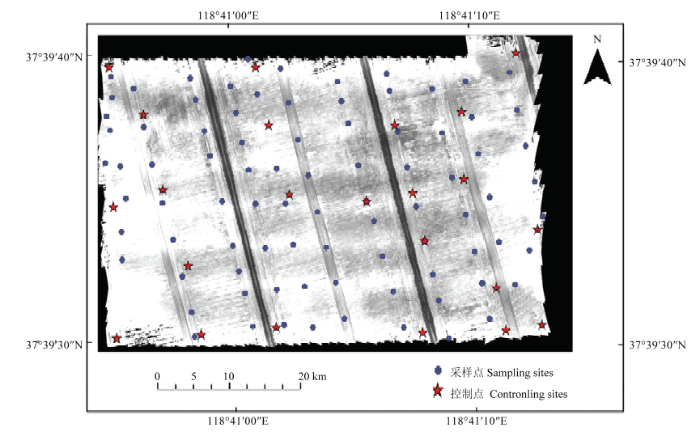
1.2.1 野外实测盐分数据 因试验区春季气候温暖干旱,降水量同比较少,土壤水分蒸发较快,地表积盐现象严重,是盐渍土和植被覆盖特征较为明显的关键时期,亦是提取土壤盐分信息的最适时相,因此本研究于2018年4月26日—28日进行野外实地采样。采样时试验区为成片裸地区域,地表无植被覆盖,均匀布设采样点85个,校正控制点22个,采用EC110便携式盐分计(仪器在使用前已经对电导率进行了温度校正)测定10 cm土壤表层的盐分值,并通过手持GPS定位仪测定各个采样点的实地坐标,同时记录方位、地形等环境因素信息。
1.2.2 无人机遥感图像获取及预处理 采样时试验区天气晴朗,光照条件充足均匀,天空状态均一。利用大疆 Matrice 600 Pro?六旋翼无人机(中国深圳市大疆创新科技有限公司生产,飞行载重为6 kg,无风环境下最大飞行水平飞行速度为65 km·h-1)搭载Parrot Sequoia 农业专用多光谱相机(含有4个120万像素窄带和同步化单色传感器)获取试验区无人机多光谱遥感图像。相机传感器含有绿光(波长550 nm,带宽40 nm)、红光(波长660 nm,带宽40 nm)、红边光(波长735 nm,带宽10 nm)和近红外光(波长790 nm,带宽40 nm)4个波段。起飞前设定飞行高度50 m,空间分辨率为2.2 cm,对传感器进行航线设定(图2),并采集白板数据用于后期的辐射校正。然后利用Pix4D mapper软件完成图像拼接、辐射校正及正射校正,在ENVI软件中通过地面控制点数据进行几何校正及地理配准,得到假彩色合成波段图像(图3)。
图2
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图2无人机飞行航线图
Fig. 2The route map of UAV flight
图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3试验区假彩色合成波段图像和样点分布图
Fig. 3Image of false color synthesis band and map of the samples in the study area
1.3 土壤盐分敏感波段和光谱参量的筛选
将野外实测的采样点按其GPS经纬度信息导入试验区的假彩色合成波段图像,确定其相应像元,并提取该像元的各波段反射率值。分别将采样点土壤盐分实测值与图像各波段反射率进行相关性分析、灰色关联度分析,筛选土壤盐分的敏感波段。灰色关联度可以将多种因素视为一个灰色系统,利用关联度辨别系统中各个因素的主次关系。因素的关联度越大,二者的相似程度越高,进而进行多波段数学运算组合如红光+近红、红光×绿光等,构建了33个光谱指数,再利用相关性分析、灰色关联度分析优选光谱参量。1.4 土壤盐分反演模型的构建与验证
将85个样本随机分为2组,其中60个用于建模,25个用于验证。1.4.1 模型构建 基于建模样本的土壤盐分含量及优选出的光谱参量,分别采用多元线性回归(multivariable linear regression, MLR)、支持向量机(support vector machine, SVM)以及偏最小二乘法(partial least square, PLS)构建土壤盐分反演模型。
运用SPSS 22软件建立土壤盐分的多元线性回归方程。利用光谱参量的共线性、方差膨胀因子以及特征根系统综合度量参量之间的多重共线性,将存在共线性的指标剔除,然后再进行回归分析,得到多元线性回归方程[30]。
支持向量机是以核函数为构成模块,隐式地将数据映射到高维空间。本文设定SVM类型为4(即v-SVR),核函数类型为2(即RBF),采用训练集交叉验证和网格搜索法(grid search)进行参数寻优,依据均方差最小原则确定惩罚参数C和核参量g的值;相关计算采用Matlab R2014a软件的Libsvm 3.11 工具箱实现[31]。
偏最小二乘法是最常用的一种光谱建模方法,相当于主成分分析、多元线性回归以及典型相关分析的组合[32],可在一定程度上有效地消除参量之间的多重共线性。采用Matlab R2014a软件相应的计算机程序实现。
1.4.2 模型验证 利用25个验证样本数据对所建模型进行验证与评价,参数如下:建模精度采用建模集的预测值和实际值的决定系数(R2)和均方根误差(root mean squares error,RMSE)进行评价;预测精度采用验证集R2、RMSE和相对分析误差(the ratio of prediction to deviation,RPD)来评价。当RPD≥2.0时,表明构建的模型预测结果较好,模型可用于土壤盐分含量的反演预测[33]。通过模型精度对比,选定最佳模型用于土壤盐分含量的空间分布反演。
1.5 土壤含盐量的空间分布反演与精度分析
基于最佳模型和试验区预处理后的遥感图像,进行土壤盐分的空间分布反演,并根据中国半湿润区土壤可溶盐类以氯化物为主的滨海盐渍土分级标准[31]进行盐渍土分级,得到试验区土壤盐分反演图。同时,将样点土壤盐分含量利用反距离加权法进行插值分析,得到试验区土壤盐分插值图,与反演图进行对比,评价基于无人机多光谱遥感的土壤盐分反演精度。2 结果
2.1 土壤样本的描述性统计特征
全部85个样本土壤盐分介于0.243—23.400 g·kg-1,平均值为7.136 g·kg-1,标准差为5.105 g·kg-1;60个建模集土壤盐分为0.243—23.400 g·kg-1,平均值为7.028 g·kg-1,标准差为5.013 g·kg-1;25个验证集土壤盐分为0.256—23.100 g·kg-1,平均值为7.395 g·kg-1,标准差为5.216 g·kg-1。可见,建模集和验证集均保持与全部样本集相似的统计分布,在确保样本具有代表性的同时,可避免在模型构建和验证中的偏差估计。2.2 土壤盐分的敏感波段及光谱参量
样本土壤盐分与波段反射率的相关性、灰色关联度分析结果见表1,可见2种分析方法中,4个波段的敏感程度略有不同,基于相关性分析选择的敏感波段为红光、绿光以及红边波段,基于灰色关联度分析选择的敏感波段为红光、绿光及近红波段。综合可见,红光和绿光波段可作为土壤盐分的敏感波段。Table 1
表1
表1敏感波段分析
Table 1
| 波段 Band | 相关系数 Correlation coefficient | 灰色关联度指数 Grey correlation index |
|---|---|---|
| 红光 (red,r) | -0.642** | -0.684** |
| 绿光 (gre,g) | -0.591** | -0.688** |
| 红边 (reg) | -0.590* | -0.665* |
| 近红 (nir) | -0.573* | -0.670* |
新窗口打开|下载CSV
33个光谱指数的相关性分析及灰色关联度分析结果见表2。可见,相关性较高的光谱指数主要是红光、绿光以及红边波段的组合,这与相关性分析选取的敏感波段结果一致,但相关系数有所提高;灰色关联度较高的光谱指数主要是红光、绿光以及近红波段的组合,亦与敏感波段的选取结果一致,关联度指数亦有所提高,说明进行波段组合形成新的光谱指数可提高与土壤盐分的关系。分别选择相关性较高的波段及光谱指数($\sqrt{r^{2}+g^{2}}$、r+nir、r+nir+g、$\sqrt{r^{2}+reg^{2}}$、red)和灰色关联度高的波段及光谱指数 (r+nir、r×nir、gre、red、r/g) 作为光谱参量参与盐分定量反演模型的构建。
Table 2
表2
表2光谱指数分析
Table 2
| 序号 Number | 光谱指数 Spcetral index | 相关系数 Correlation coefficient | 灰色关联度指数 Grey correlation index |
|---|---|---|---|
| 1 | r+nir | -0.645** | -0.720** |
| 2 | R×nir | -0.600* | -0.708** |
| 3 | r/g | -0.185 | -0.756** |
| 4 | R+nir+g | -0.641** | -0.665** |
| 5 | $\sqrt{r^{2}+reg^{2}}$ | -0.601** | -0.668** |
| 6 | g×nir | -0.562* | -0.658* |
| 7 | g+reg | -0.603* | -0.671* |
| 8 | (r+g)/(r-g) | -0.015 | -0.471* |
| 9 | g×r | -0.145 | -0.701* |
| 10 | $\sqrt{r^{2}+g^{2}}$ | -0.640** | -0.700** |
| 11 | r+nir+reg | -0.631** | -0.709** |
| 12 | r×reg | -0.591* | -0.649* |
| 13 | r+reg | -0.634** | -0.691** |
| 14 | (reg-r)/( reg+r) | 0.252 | -0.183 |
| 15 | g×nir×r | -0.556* | -0.603* |
| 16 | g+r+reg | -0.632* | -0.678* |
| 17 | g×r×reg | -0.037 | -0.576* |
| 18 | g×reg | -0.124 | -0.609* |
| 19 | (reg-g)/( reg+g) | 0.148 | -0.354 |
| 20 | r-g | -0.21 | -0.206 |
| 21 | reg-r | 0.048 | -0.079 |
| 22 | reg/r | -0.17 | -0.709* |
| 23 | $\sqrt{g^{2}+reg^{2}+r^{2}}$ | -0.601* | -0.668* |
| 24 | $\sqrt{r\times reg}$ | -0.634* | -0.689* |
| 25 | $\sqrt{r\times r}$ | -0.643* | -0.702* |
| 26 | $\sqrt{g^{2}+reg^{2}}$ | -0.605* | -0.669* |
| 27 | (reg+g)/(g-reg) | 0.117 | -0.238 |
| 28 | (r+g)/(r-g) | -0.015 | -0.471* |
| 29 | $\sqrt{reg\times g}$ | -0.631* | -0.679* |
| 30 | $\sqrt{reg \times r \times g}$ | -0.613* | -0.689* |
| 31 | r+nir+g+reg | -0.631* | -0.660* |
| 32 | r+nir+g | -0.641* | -0.665* |
| 33 | nir+g+reg | -0.606* | -0.652* |
新窗口打开|下载CSV
2.3 土壤盐分定量反演模型
基于建模样本,以选取的光谱参量为自变量,土壤盐分为因变量,分别采用多元线性回归、支持向量机、偏最小二乘法构建土壤盐分定量反演模型(表3)。Table 3
表3
表3土壤盐分反演模型
Table 3
| 分析方法 Analytical methods | 建模方法 Modeling methods | 建模精度Calibration accuracy | 验证精度Verification accuracy | |||
|---|---|---|---|---|---|---|
| 决定系数 R2 | 均方根误差 RMSE | 决定系数 R2 | 均方根误差 RMSE | 相对分析误差 RPD | ||
| 相关性分析 Correlation analysis | MLR | 0.645 | 5.217 | 0.564 | 5.157 | 1.261 |
| SVM | 0.730 | 5.363 | 0.782 | 5.596 | 2.083 | |
| PLS | 0.711 | 5.545 | 0.707 | 5.362 | 1.870 | |
| 灰色关联度 Grey correlation index | MLR | 0.691 | 4.291 | 0.687 | 5.013 | 1.731 |
| SVM | 0.820 | 3.626 | 0.773 | 4.960 | 2.203 | |
| PLS | 0.722 | 4.677 | 0.724 | 4.731 | 2.210 | |
新窗口打开|下载CSV
相较于相关性分析,灰色关联度选取光谱参量构建的模型精度均有所提高,其中建模集R2提高0.011—0.090,RMSE降低0.868—1.737,验证集R2提高0.009—0.123,RMSE降低0.010—0.610,RPD提高0.120—0.340(表3)。结果表明通过灰色关联度筛选光谱参量可在一定程度上提高土壤盐分反演模型的精度。
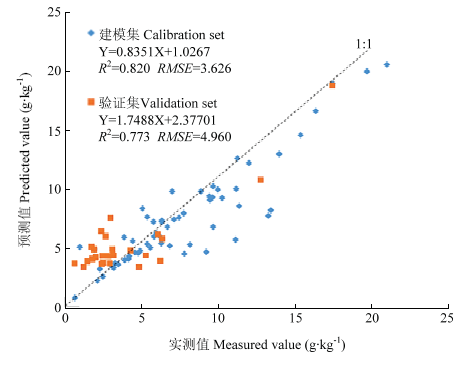
对比3种建模方法,SVM模型精度最高,PLS模型次之,MLR模型最低。其中,基于灰色关联度光谱参量的SVM模型建模R2达到0.820,验证R2为0.773,RPD达到2.210,通过对比,确定该模型为土壤盐分反演的最佳模型。
图4是最佳模型的建模、验证精度,可见预测值与实测值之间呈现良好的线性关系,大部分样本较好地分布在1:1线的两侧,表明该模型精度较高且较为稳定。
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4最佳模型散点图
Fig. 4The scatter diagram of the best model
2.4 土壤盐分空间分布反演
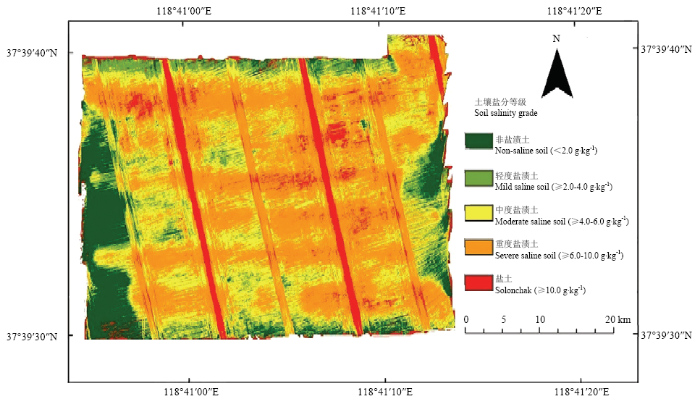
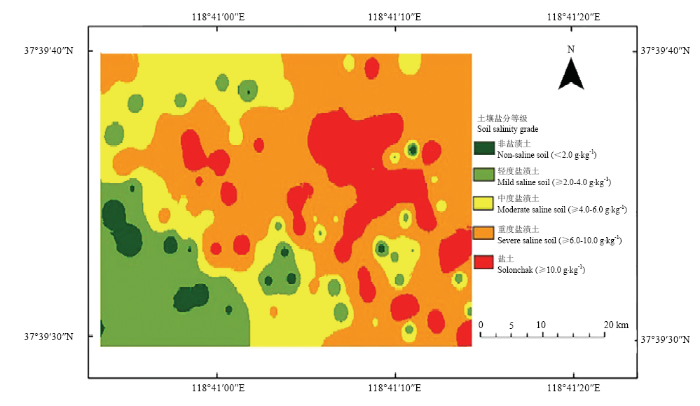
基于最佳模型,进行试验区土壤盐分反演(图5)。可见试验区土壤含盐量反演值介于0.323—21.210 g·kg-1,平均值为6.871 g·kg-1,与研究样本的描述性统计结果较为接近。根据滨海盐渍土分级标准,将试验区土壤分为5级,并进行面积统计(表4)。可见,试验区中、重度盐渍土达到83.567%,其中重度盐渍土达到58.094%,较为普遍地分布在整个区域,中部和东部更为集中连片;非盐土和轻度盐渍土只占总面积的12.511%,主要分布在区域西南部的小片区域。结果表明该区土壤盐渍化十分普遍且较为严重,整体属于重度盐渍土区,与实际情况一致。图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5土壤盐分含量反演图
Fig. 5The inversion map of soil salinity
Table 4
表4
表4试验区土壤盐分等级及其比例
Table 4
| 等级 Grade | 反演图Inversion map | 插值图 Interpolation map | ||
|---|---|---|---|---|
| 像元数 Pixel count | 所占比例 Percentage (%) | 像元数 Pixel count | 所占比例 Percentage (%) | |
| 非盐渍土Non-saline soil (<2.0 g·kg-1) | 3027962 | 7.640 | 1025934 | 2.476 |
| 轻度盐渍土Mild saline soil (≥2.0-4.0 g·kg-1) | 1928771 | 4.871 | 7327621 | 17.691 |
| 中度盐渍土Moderate saline soil (≥4.0-6.0g·kg-1) | 10091297 | 25.473 | 11092173 | 26.779 |
| 重度盐渍土Severe saline soil (≥6.0-10.0 g·kg-1) | 23018069 | 58.094 | 20015014 | 48.321 |
| 盐土Solonchak (≥10.0 g·kg-1) | 1558977 | 3.932 | 1959849 | 4.731 |
新窗口打开|下载CSV
2.5 土壤盐分空间分布反演精度分析
基于反距离加权法进行土壤盐分插值分析(图6、表4),得到该区土壤盐分含量位于0.243—23.400 g·kg-1,平均值为7.136 g·kg-1。中、重度盐渍土占总面积的75.122%,而非盐渍土只占2.476%,而且在空间分布上也表现出西南部盐分较低、中东部盐分较高的趋势。可见插值分析结果与最佳反演模型和样点统计结果皆较为相近。图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6基于反距离加权的土壤盐分插值图
Fig. 6Soil salt interpolation map based on inverse distance weighting
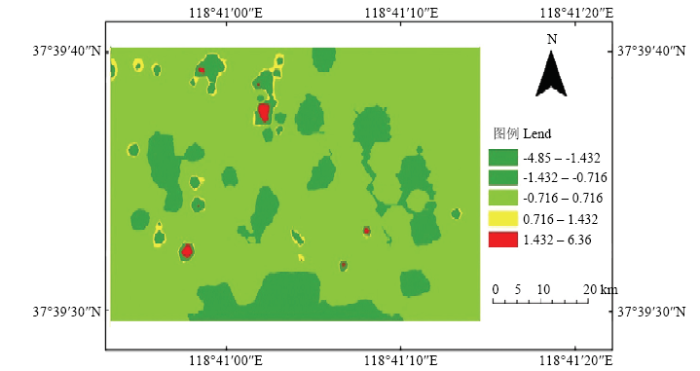
为进一步对比反演结果的差异程度,将2种分布图的土壤盐分含量进行像元相减(插值图-反演图)运算,获得土壤盐分含量差值空间分布图(图7)。可以看出,地统计结果和反演结果的差异介于-4.850—6.360;为进一步比对反演得到的土壤盐分含量空间分布的正确性,将各像元的差值进行统计分析,以实测样点土壤盐分含量平均值7.160 g·kg-1的10%(±0.716)、20%(±1.432)和30%(±2.184)作为差异等级水平,分别统计各自范围内的像元数量及其所占比例。像元反演差值在允许误差10%以内的占76.75%,在20%以内的占88.04%,表明该反演结果与插值结果的误差大多控制在20%以内,结果较为相似。可见,上述最佳模型可应用于该地区土壤盐分分布反演。
图7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图7插值结果与反演结果的差值
Fig. 7The difference between interpolation results and inversion results
3 讨论
2种光谱筛选分析方法结果均表明可见光、近红外波段与土壤盐分具有良好的关系。黄河三角洲区域主要矿物组成为岩盐、石膏,盐分组成以钠型盐氯化物为主,主要阴离子为Cl-和SO42-,主要阳离子为Na+、Ca2+[34,35]。前人研究指出虽然NaCl在可见光-近红外波段没有光谱特征,但NaCl与石膏存在相关性,石膏因在可见光-近红外波段具有吸收特性可间接显示土壤盐分的光谱信息[36,37];徐伟杰[38]的研究表明石膏在近红外波段出现分子振动吸收光谱特征,且可见光-近红外能够获取SO42-的光谱信息。因此,前人研究表明可利用可见光-近红外波段提取裸土遥感数据的光谱信息进行土壤盐分预测。而且,现有多位****的研究表明,盐碱化土壤在可见光和近红外波段较非盐碱化土壤有更强的反射率[19,38-40],且重钠质盐渍土壤的光谱反射率比一般重盐渍土的反射率高[9,40-41],如陈文娇[41]提出盐渍土在447、498、671nm附近均存在不同深度的吸收峰,与本文结论较为一致。比较2种不同的分析方法,基于相关性分析的敏感波段为红光、绿光以及红边波段,基于灰色关联度分析的敏感波段为红光、绿光及近红波段。这2种方法基于不同的系统理论,灰色关联度根据序列曲线几何形状的相似程度判断关联度,在变化趋势上理清各波段对土壤盐分的主次关系并排序[42];而相关分析仅依赖客观数据分析单一波段与土壤盐分的相关性。因此,灰色关联度分析的结果更为可靠。这也与前面所述可见-近红外光谱用来提取土壤盐渍化信息的内在机理是一致的。
本研究以垦利区黄河口镇重度盐渍土为例,以无人机多光谱遥感图像为主要数据源,利用相关性分析和灰色关联度分析筛选光谱参量,分别构建MLR、SVM和PLS模型,通过最佳模型进行空间分布反演,得到的结果与实地采样和地统计插值分析结果较为一致,表明无人机多光谱可实现重度盐渍土盐分信息的准确提取,但对于中、轻度盐渍土是否会有相同的结果需要进一步研究探索,也是下一步的工作方向。
基于地面高光谱的土壤盐分定量估测是遥感反演的基础,而基于无人机近地遥感的土壤盐分反演是由地面高光谱定量分析到卫星遥感反演的桥梁。现有普遍高光谱盐分监测的研究已表明,可见光-近红外波段光谱用于分析土壤盐分的可行性,本研究初步尝试了基于无人机多光谱的重度盐渍土盐分定量反演,但盐渍土的光谱响应特征又与土壤水分以及地理环境因素都存在相关关系,且土壤水分是土壤盐分定量遥感分析的主要影响因素之一。因此,下一步将结合地面高光谱、无人机多光谱/高光谱数据,探讨机地光谱融合及土壤水分因素的影响去除,以提高无人机反演土壤盐分精度。
4 结论
(1)对比2种波段筛选方法,基于相关性分析确定的敏感波段为红光、绿光以及红边波段,而基于灰色关联度确定的敏感波段为红光、绿光及近红波段;进而,基于相关性分析选取的光谱参量为$\sqrt{r^{2}+g^{2}}$、r+nir、r+n+g、$\sqrt{r^{2}+reg^{2}}$、red,基于灰色关联度选取的光谱参量为r+nir、r×nir、g、red、r/g。(2)相对于相关性分析,基于灰色关联度分析的模型建模R2提高了0.011—0.090,RMSE降低0.868—1.737,验证R2提高了0.009—0.123,RMSE降低了0.010—0.610,RPD提高0.120—0.340,通过灰色关联度筛选光谱参量可在一定程度上提高土壤盐分反演模型的精度。
(3)对比3种建模方法,支持向量机(SVM)建模精度最佳,偏最小二乘法(PLS)次之,多元线性回归方程(MLR)最低;土壤盐分定量反演的最佳模型为基于灰色关联度筛选光谱参量的支持向量机模型,其建模集R2、RMSE分别为0.820、3.626,验证集的R2、RMSE、RPD分别为0.773、4.960、2.200。
(4)据此模型反演得到该区土壤盐分含量为0.323—21.210 g·kg-1,平均值为6.871 g·kg-1,重度盐渍土占58.094%,与实地调查较为一致。反演结果与反距离加权插值结果的误差80%控制在样本盐分含量平均值的20%以内,亦较为相近。
因此,基于无人机多光谱,先采用灰色关联度分析筛选光谱参量,进而采用支持向量机构建反演模型可实现土壤盐分信息的准确提取。
(责任编辑 杨鑫浩)
参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.ecolind.2018.05.069URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1007/s12524-016-0587-0URL [本文引用: 1]
DOI:10.1080/01431160801930248URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.3390/rs8010042URL [本文引用: 2]
DOI:10.1080/01431169208904205URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.rse.2015.08.026URL [本文引用: 1]
URL [本文引用: 1]

选择黄河三角洲垦利县代表性盐碱化区域为研究区, 以2011年3月15日HJ-1A卫星HSI高光谱影像和2011年3月22日TM影像为信息源, 经几何纠正、 图像裁剪、 大气校正等预处理, 分析不同盐渍化程度土地、 水体、 滩涂等主要地类的光谱特征, 确定地类信息提取特征波段。 结合土壤盐分含量, 采用定量与定性相结合规则, 构建地类信息提取模型, 以决策树分类方法进行图像分类, 提取土地盐渍化信息。 利用地表点位土壤含盐量数据对地表土地盐渍化程度的化学分析结果, 对遥感解译数据进行精度验证, 并对高光谱和多光谱影像的分类精度进行比较分析。 结果表明: HSI图像的总体分类精度达96.43%, Kappa系数为95.59%, 而TM图像的总体分类精度为89.17%, Kappa系数为86.74%, 说明相比多光谱TM数据, 基于高光谱图像可以更为准确有效地提取土地盐渍化信息; 由分类结果图可以看出, 高光谱影像土地盐渍化的区分度高于多光谱影像。 该研究探索了高光谱图像土地盐渍化信息的提取技术方法, 提供了不同盐渍化土地的分布比例数据, 可为黄河三角洲滨海盐碱土地资源的科学利用与管理提供决策依据。
URL [本文引用: 1]
选择黄河三角洲垦利县代表性盐碱化区域为研究区, 以2011年3月15日HJ-1A卫星HSI高光谱影像和2011年3月22日TM影像为信息源, 经几何纠正、 图像裁剪、 大气校正等预处理, 分析不同盐渍化程度土地、 水体、 滩涂等主要地类的光谱特征, 确定地类信息提取特征波段。 结合土壤盐分含量, 采用定量与定性相结合规则, 构建地类信息提取模型, 以决策树分类方法进行图像分类, 提取土地盐渍化信息。 利用地表点位土壤含盐量数据对地表土地盐渍化程度的化学分析结果, 对遥感解译数据进行精度验证, 并对高光谱和多光谱影像的分类精度进行比较分析。 结果表明: HSI图像的总体分类精度达96.43%, Kappa系数为95.59%, 而TM图像的总体分类精度为89.17%, Kappa系数为86.74%, 说明相比多光谱TM数据, 基于高光谱图像可以更为准确有效地提取土地盐渍化信息; 由分类结果图可以看出, 高光谱影像土地盐渍化的区分度高于多光谱影像。 该研究探索了高光谱图像土地盐渍化信息的提取技术方法, 提供了不同盐渍化土地的分布比例数据, 可为黄河三角洲滨海盐碱土地资源的科学利用与管理提供决策依据。
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.jag.2013.06.002URL [本文引用: 1]
DOI:10.1007/s12517-014-1580-yURL [本文引用: 1]
DOI:10.1016/j.compag.2016.02.016URL [本文引用: 1]
Magsci [本文引用: 1]
土壤盐碱化是干旱、半干旱农业区主要的土地退化问题,同时也是一个重要的环境问题。遥感技术能够快速、实时地提供盐碱地的性质、范围、盐碱程度等方面的信息。该文以河北省黄骅市为研究区,通过对实测的土壤光谱的分析,发现植被严重干扰了土壤对盐分含量光谱响应关系,同时,在451.42~593.79 nm波长范围内的土壤反射率对土壤盐分含量较为敏感,在土壤光谱分析的基础上,建立了土壤盐分含量反演的相关统计模型。但由于遥感影像特征与土壤盐分含量之间存在较复杂的非线性关系,因此统计模型反演精度不够理想。因而,又尝试运用BP人工神经网络方法来反演土壤盐分含量。研究表明,BP人工神经网络模型具有很强的非线性拟合能力,与统计模型相比,其土壤盐分含量的反演精度有显著提高。
Magsci [本文引用: 1]
土壤盐碱化是干旱、半干旱农业区主要的土地退化问题,同时也是一个重要的环境问题。遥感技术能够快速、实时地提供盐碱地的性质、范围、盐碱程度等方面的信息。该文以河北省黄骅市为研究区,通过对实测的土壤光谱的分析,发现植被严重干扰了土壤对盐分含量光谱响应关系,同时,在451.42~593.79 nm波长范围内的土壤反射率对土壤盐分含量较为敏感,在土壤光谱分析的基础上,建立了土壤盐分含量反演的相关统计模型。但由于遥感影像特征与土壤盐分含量之间存在较复杂的非线性关系,因此统计模型反演精度不够理想。因而,又尝试运用BP人工神经网络方法来反演土壤盐分含量。研究表明,BP人工神经网络模型具有很强的非线性拟合能力,与统计模型相比,其土壤盐分含量的反演精度有显著提高。
[本文引用: 2]
[本文引用: 2]
DOI:10.1016/j.rse.2017.05.026URL [本文引用: 1]
Magsci [本文引用: 1]
无人机遥感具有使用成本低、操作简单、获取影像速度快、地面分辨率高等传统遥感无法比拟的优势。该文通过分析仅含红光、绿光和蓝光3个可见光波段的无人机影像中植被与非植被的光谱特性,同时结合健康绿色植被的光谱特征,借鉴归一化植被指数NDVI的构造原理及形式,提出了一种综合利用红、绿、蓝3个可见光波段的归一化植被指数--可见光波段差异植被指数VDVI(visible-band difference vegetation index)。与其他基于可见光波段的植被指数,如过绿指数EXG(excess green)、归一化绿红差值指数NGRDI(normalized green-red difference index)、归一化绿蓝差值指数NGBDI(normalized green-blue difference index)和红绿比值指数RGRI(red-green ratio index)以及仅用绿光波段的提取结果进行对比分析,结果表明:VDVI植被提取精度高于其他可见光波段植被指数,且阈值在0附近,较易确定。为了验证VDVI的适用性与可靠性,选取与试验影像同一时期拍摄但不同区域的另一影像使用同样的方法提取植被信息。结果表明:VDVI对于仅含可见光波段无人机遥感影像的健康绿色植被信息具有较好的提取效果,提取精度可达90%以上,适用于仅含可见光波段无人机遥感影像的健康绿色植被信息提取。
Magsci [本文引用: 1]
无人机遥感具有使用成本低、操作简单、获取影像速度快、地面分辨率高等传统遥感无法比拟的优势。该文通过分析仅含红光、绿光和蓝光3个可见光波段的无人机影像中植被与非植被的光谱特性,同时结合健康绿色植被的光谱特征,借鉴归一化植被指数NDVI的构造原理及形式,提出了一种综合利用红、绿、蓝3个可见光波段的归一化植被指数--可见光波段差异植被指数VDVI(visible-band difference vegetation index)。与其他基于可见光波段的植被指数,如过绿指数EXG(excess green)、归一化绿红差值指数NGRDI(normalized green-red difference index)、归一化绿蓝差值指数NGBDI(normalized green-blue difference index)和红绿比值指数RGRI(red-green ratio index)以及仅用绿光波段的提取结果进行对比分析,结果表明:VDVI植被提取精度高于其他可见光波段植被指数,且阈值在0附近,较易确定。为了验证VDVI的适用性与可靠性,选取与试验影像同一时期拍摄但不同区域的另一影像使用同样的方法提取植被信息。结果表明:VDVI对于仅含可见光波段无人机遥感影像的健康绿色植被信息具有较好的提取效果,提取精度可达90%以上,适用于仅含可见光波段无人机遥感影像的健康绿色植被信息提取。
DOI:10.3390/rs70302627URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.14358/PERS.80.8.785URL [本文引用: 1]
DOI:10.1016/j.biosystemseng.2016.04.018URL [本文引用: 1]
DOI:10.5194/bg-13-6545-2016URL [本文引用: 1]
DOI:10.3390/rs70303184URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
Magsci [本文引用: 2]
快速获取土壤盐分的含量、特征及空间分布信息是盐渍土治理、利用的客观需求。该文针对黄河三角洲盐渍土,以垦利县为例,基于Landsat 8 OLI 多光谱影像,在传统植被指数的基础上引入短波红外波段进行扩展,提出了改进植被指数;然后基于改进前后对应的植被指数,分别采用多元逐步回归(multivariable linear regression,MLR)、反向传播神经网络(back propagation neural networks,BPNN)和支持向量机(support vector machine,SVM)方法构建土壤盐分含量的遥感反演模型,并进行模型验证、对比和优选;最后基于最佳模型进行研究区土壤盐分含量的空间分布反演和分析。结果显示:相对传统植被指数,扩展后植被指数可增强与土壤盐分的相关性,大幅降低指数间的多重共线性;采用上述3种方法建模,改进后模型的精度比改进前都有提高,验证集决定系数R2提高0.04~0.10,均方根误差RMSE降低0.13~0.73,相对分析误差RPD提高0.25~0.34,改进后模型RPD均大于2.0,普遍达到性能良好;对比3种建模方法,SVM建模精度最高,BPNN模型次之,MLR分析精度最低,最佳模型为基于改进植被指数的土壤盐分含量支持向量机反演模型,建模集R2和RMSE为0.75、3.48,验证集R2、RMSE和RPD为0.78、3.02和2.56,模型较为准确、可靠;基于该模型反演的研究区土壤盐分含量整体较高,盐渍化程度空间分布表现为自西南部农业生产区至东北沿海区域逐渐加重,与实地调查一致。研究表明基于Landsat 8 OLI多光谱影像,引入第7波段对植被指数进行改进,从而构建土壤盐分含量的支持向量机模型,可获得较好的土壤盐分空间分布反演结果。
Magsci [本文引用: 2]
快速获取土壤盐分的含量、特征及空间分布信息是盐渍土治理、利用的客观需求。该文针对黄河三角洲盐渍土,以垦利县为例,基于Landsat 8 OLI 多光谱影像,在传统植被指数的基础上引入短波红外波段进行扩展,提出了改进植被指数;然后基于改进前后对应的植被指数,分别采用多元逐步回归(multivariable linear regression,MLR)、反向传播神经网络(back propagation neural networks,BPNN)和支持向量机(support vector machine,SVM)方法构建土壤盐分含量的遥感反演模型,并进行模型验证、对比和优选;最后基于最佳模型进行研究区土壤盐分含量的空间分布反演和分析。结果显示:相对传统植被指数,扩展后植被指数可增强与土壤盐分的相关性,大幅降低指数间的多重共线性;采用上述3种方法建模,改进后模型的精度比改进前都有提高,验证集决定系数R2提高0.04~0.10,均方根误差RMSE降低0.13~0.73,相对分析误差RPD提高0.25~0.34,改进后模型RPD均大于2.0,普遍达到性能良好;对比3种建模方法,SVM建模精度最高,BPNN模型次之,MLR分析精度最低,最佳模型为基于改进植被指数的土壤盐分含量支持向量机反演模型,建模集R2和RMSE为0.75、3.48,验证集R2、RMSE和RPD为0.78、3.02和2.56,模型较为准确、可靠;基于该模型反演的研究区土壤盐分含量整体较高,盐渍化程度空间分布表现为自西南部农业生产区至东北沿海区域逐渐加重,与实地调查一致。研究表明基于Landsat 8 OLI多光谱影像,引入第7波段对植被指数进行改进,从而构建土壤盐分含量的支持向量机模型,可获得较好的土壤盐分空间分布反演结果。
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.soilbio.2007.12.011URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.2136/sssaj2009.0351URL [本文引用: 1]
[D].
[本文引用: 2]
[D].
[本文引用: 2]
DOI:10.3390/rs70100488URL
[本文引用: 2]
[本文引用: 2]
[D].
[本文引用: 2]
[D].
[本文引用: 2]
[本文引用: 1]
[本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}