
ʽ��,Ik(tn)��
 k(tn)�ֱ��ʾtnʱ�̵�k���źŵķ��Ⱥ���λ;nm(tn)��ʾtnʱ�̵�m����Ԫ���ĸ�������,n=1,2,��,N��ʾ������,m=1,2,��,M��ʾ��Ԫ��.���ĵ�Ŀ���ǹ����źŵķ�λ��=(��1,��2,��,��k)T,�����źŵİ���A={Ak(tn),∀ k,n}�������ķ������Ȥ.��Bayesian���ۿ�֪,�źŷ�λ��=(��1,��2,��,��k)T�ĺ�������ܶȺ���Ϊ
k(tn)�ֱ��ʾtnʱ�̵�k���źŵķ��Ⱥ���λ;nm(tn)��ʾtnʱ�̵�m����Ԫ���ĸ�������,n=1,2,��,N��ʾ������,m=1,2,��,M��ʾ��Ԫ��.���ĵ�Ŀ���ǹ����źŵķ�λ��=(��1,��2,��,��k)T,�����źŵİ���A={Ak(tn),∀ k,n}�������ķ������Ȥ.��Bayesian���ۿ�֪,�źŷ�λ��=(��1,��2,��,��k)T�ĺ�������ܶȺ���Ϊ
����[5]������������������㷨���ʽ(2)�Ļ�������,���Ƚ�N�ο������ݷֳ�Nb��,ÿ����N/Nb=nb����������.��ÿһ�����ݿ����������,���ڵ�s�����ݿ���

ʽ��
��k��ek=[e1k,e2k,��,eKk]T���ֱ��Ǿ���F������ֵ������������F��K��Kά�ľ���,��Ԫ�ض���Ϊ

�ֱ�ȡ��������������Jeffrey����ֲ�
 �;�������ֲ�p(��)=1,���ɵõ���������ܶ�Ϊ
�;�������ֲ�p(��)=1,���ɵõ���������ܶ�Ϊ
ʽ��

��ʽ(5)���Կ���,����һ���������ĸ�ά�����ԵĶ��ֵ����,Ҫ������ȫ�����ֵ��Ӧ�ķ�λ��,ͨ���Ժ�������ܶȽ���Kά���������õ�ȫ������ֵ,�������dz���,�������һ�������ĺ�������ܶȵļ�����Ϊ��,��ôKά�ļ�����Ϊ��K.���Ծ���Bayesian��λ���Ʒ����Ĺ��ƾ��Ⱥܸ�,�������ļ���������ʵ��Ӧ�õ�����ϰ�.2 ������Ⱥ�㷨��Bayesian�������ȸ���ACO-Bayesian����������ͼ��ͼ 1��ʾ.
 |
| ͼ 1 ACO-Bayesian��������ͼFig. 1 Flow chart of ACO-Bayesian method |
| ͼѡ�� |
����������[15]���Ѷ���Ⱥ�㷨�IJ���������ϸ�Ľ���,�������ԭ���Բ���.1) ��ʼ��.���ȸ��ݾ��ȷֲ�UK[��a,��b]��Kά�����ռ�õ�һ�����������ռ�(��1��2����L),�������������ռ䰴��ACO-Bayesian������Ŀ�꺯��ֵ(��ʽ(5))�Ӵ�С��������.Ȼ���ն�����˹�ֲ�N(1,q2L2)���������ռ��Ӧ��Ȩֵ����,ÿ����Ӧһ��Ȩֵ,��������ռ估���Ӧ��Ŀ�꺯��ֵ��Ȩֵ�������뵵������.2) ����ת�Ƹ��ʸ��º�ѡ��.�������ѭ������ʱ,ÿֻ������ת�Ƹ���p(��ʽ(6)����)�����������ռ���ѡ��һ�����l(ÿ�ε���ÿֻ����ֻ��ѡ��һ��),Ȼ������ѡ�н�Ϊ��ֵ,�����������н���ѡ�н��ƽ������Ϊ����(����Ϣ�ػӷ�ϵ�������������)�ĸ�˹�˺�����ʽ(7),���øø�˹�˺����Ե������е����н���и�˹�˳����õ���ѡ��.
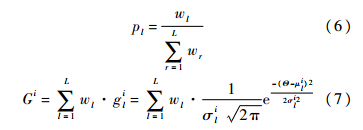
ʽ��,Gi�Ƕ����������ռ�������һ�θ�˹�˳���ֵ;wl(l=1,2,��,L)���Dz���1)�����ÿһ����Ӧ��Ȩֵ,L�������ռ�ij�������;��li����ѡ�н�;��liΪ����Ϣ�������������������ռ����н��뵱ǰѡ�н��ƽ��ƫ��.��Kά�����ռ���

������li��ʾ��ǰѡ�н�ĵ�i������.3) ���ݺ�ѡ����������ռ�.�����ѡ���Ӧ��Ŀ�꺯��ֵ,���뵵�����еĵ�1�����бȽ�,�����ڵ�1���,���ú�ѡ���滻���һ���(��Ŀ�꺯��ֵ��С�Ľ�),ͬʱ����������ӵĽ⸳Ȩֵ,�����²����������ռ䰴��Ŀ�꺯��ֵf�Ӵ�С��������;��С�ڵ�1���,��������.4) �õ���λ����ֵ.����һ��������,������5�εķ�λ����ֵ��ǰһ�ε�������IJ�ֵ��С����,���������,��λ���ƽ��Ϊ���5�εĵ�������ľ�ֵ.�����������������ת����2).3 �����������ܷ�������������в��þ���������,��Ԫ����Ϊ12,����Ƶ��Ϊ120 kHz,100�ο���,��Ŀ�����䷽λ�Ƿֱ�Ϊ��2��,��һ���н�Ϊ��=0.475 6.3.1 Ŀ��ֱ���ʺ������ܷ���1) ��Ŀ�������Ϊ0 dBʱ,Bayesian����������ʷֲ�������ͼ 2��ʾ,ͼ 3(a)��ͼ 3(b)�ֱ������ά�ȸ���ͼ�ͷ�ֵ�㸽���ķŴ�ͼ.���������ؿ���Bayesian�����ĺ�����ʷֲ�����ֻ��һ��ȫ�����ֵ��,�õ��Ӧ�������ǶȾ�����Ŀ�귽λ�Ĺ���ֵ,Bayesian������һ�������ԵĶ�ά���Ż�������.
 |
| ͼ 2 �����������Fig. 2 Curved surface of posteriori probability |
| ͼѡ�� |
 |
| ͼ 3 ��ά�ȸ���ͼ�ͷ�ֵ�㸽���Ŵ�ͼFig. 3 2-dimension contour and enlarged drawing near peak value points |
| ͼѡ�� |
2) ACO-Bayesian������λ���ƽ������������Ĺ�ϵ����(SNR=0 dB)��ͼ 4��ʾ,���Կ���,�������Ϊ0 dB��ʱ��,ACO-Bayesian������������������,�������������Ž�.
 |
| ͼ 4 �����Է���Fig. 4 Convergence analysis |
| ͼѡ�� |
3) ����ACO-Bayesian�����Ĺ�������,����Bayesian,MUSIC��MNM�������Ա�ʵ��,ʵ���в�����������:T=2,L=100,q=0.1,��=0.01,��=0.001,[��a,��b]=[��60��,60��],��100��Monte Carloʵ��,ͼ 5��4�ַ����ķֱ����,���Կ���ACO-Bayesian�����ķֱ�������Bayesian�൱,����MUSIC��MNM����;ͼ 6��ͼ 7�ֱ����ź�1���ź�2�Ĺ��ƾ��������,Ϊ�˸��õضԼ��ַ����ķֱ澫�Ƚ��жԱ�,����������ȹ���MNM��MUSIC�������ܳɹ��ֱ�ʱ�������Ϊ10,��ʱ������ָ���������Ϊ10,���Կ���ACO-Bayesian��������������������MUSIC��MNM����,����ȸ���-12 dBʱ,ACO-Bayesian��Bayesian�����Ĺ��������൱.
 |
| ͼ 5 �ֱ���ʱȽ�Fig. 5 Resolution probability comparison |
| ͼѡ�� |
 |
| ͼ 6 �ź�1�ľ��������Fig. 6 RMSE (root mean squared error) of signal 1 |
| ͼѡ�� |
 |
| ͼ 7 �ź�2�ľ��������Fig. 7 RMSE (root mean squared error) of signal 2 |
| ͼѡ�� |
3.2 ���㸴�Ӷȷ����������һ�������ĺ�������ܶȵļ�����Ϊ��,��Bayesian�����ļ��㸴�Ӷ�ΪJB=[(��b����a)/s]P����,����,[��a,��b]��s�ֱ�ΪBayesian�����ĽǶ�������Χ����������;��ACO-Bayesian�����ļ��㸴�Ӷ�ԼΪJAB��(P��IP+L+CP��IP)����,����P,IP,L�ֱ�ΪACO-Bayesian�������źŸ��������������������ռ��������.�Ա�Bayesian������Pά����,ACO-Bayesian����ʹ�ø�˹�˸��ʳ�������,P��IP+LС��Bayesian����Pά�����ռ��������,��CP��ACO-Bayesianһ�ε�����˹�˸��ʳ����ļ�����,ԶԶС��P��IP+L.����ͨ�������ACO-Bayesian�����ļ��������з���,����ģ�ͺͲ����������3����ͬ,��50��Monte Carloʵ��,�� 1�����˲�ͬ�����������ACO-Bayesian������������λ��ʵֵ��������Ҫ��ƽ����������I2.�� 1 ��ͬ�����������ACO-Bayesian������ƽ���������� Table 1 Mean iteration times of ACO-Bayesian method in different SNR (signal to noise ratio) condition
| SNR/dB | -5 | 0 | 5 | 10 |
| ƽ���������� | 1 338.1 | 1 106.3 | 957.2 | 846.7 |
��ѡ��
�������Ϊ-5 dBΪ��,Bayesian������ACO-Bayesian�ļ��㸴�Ӷȷֱ�ΪJB=[(��b����a)/s]K����=57 600����,JAB��(T��IK+L+CK��IK)����=4 114.3����.�����Ϸ��������Կ���,ACO-Bayesian����������Bayesian�����Ĺ�������,�Ҽ�������Լ��Bayesian������1/14,�����������.4 ˮ��ʵ����֤����20��8��7 m3��������ˮ��(��ͼ 8��ʾ)��չ�߷ֱ淽λ����ʵ��Ա��ĵĿ��ٷ���������֤,�߷ֱ�ʵ���ͼ��ͼ 9��ʾ.
 |
| ͼ 8 ��������ˮ��Fig. 8 Noise elimination water tank |
| ͼѡ�� |
 |
| ͼ 9 �߷ֱ�ˮ��ʵ���ͼFig. 9 Diagram of high resolution water tank experiment |
| ͼѡ�� |
ʵ���в���6��Ԫ����������,ϵͳ����Ƶ��Ϊ122 880 Hz,��������ԼΪ16.9��,���õ�Դ����,����15 dB����Ⱥϳɼн�Ϊ��ͬ�������ȵ�˫Դ�ź�.������Ϊ4 000,ͳ��10��,��λ���ƽ����� 2��ʾ.���Կ���,ACO-Bayesian��������ʷ�λ���ƿ��ٷ����ľ����������ԭ�������,��������,��������ȷ���Ƴ�Ŀ��ķ�λ,������ԭ�����ĸ߷ֱ�����,����ȷ���Ƽн�Ϊ1/5�������ȵ���Ŀ��.�� 2 ��ͬ��һ���н������λ���ƽ��Table 2 DOA(direction of arrival) in different normalized angle
| Ŀ����ʵ��λ/(��) | ��һ���н� | Bayesian | ACO-Bayesian | ||
| ƽ��ֵ/(��) | RMSE/(��) | ƽ��ֵ/(��) | RMSE/(��) | ||
| 13.0,-3.6 | 1 BW | 12.91,-3.41 | 0.45,0.46 | 12.89,-3.39 | 0.59,0.63 |
| -3.6,2.0 | 1/3 BW | -3.20,1.91 | 0.51,0.40 | -3.19,1.89 | 0.62,0.59 |
| 0,3.2 | 1/5 BW | -0.22,2.90 | 0.53,0.67 | -0.21,2.89 | 0.68,0.67 |
��ѡ��
5 �� ��Bayesian�߷ֱ淽λ���Ʒ�������ʮ����Խ,���÷������۸���,������Ը÷������ڶ��ػ��ֺͶ�ά���������������µļ����������Թ���Ӧ�õ�����,��������Ⱥ�㷨��Bayesian��λ���Ʒ�������,�����һ�ֻ���������Ⱥ�㷨��Bayesian(ACO-Bayesian)��λ�����·���,���������������۹���,�������˷������ܷ�����ˮ��ʵ����֤.����������,ACO-Bayesian�����ڱ���Bayesian�����������ܵ�ͬʱ,��Bayesian�����ļ�������((��b����a)/s)K�������ٵ�(T��IK+L+CK��IK)����,���������˼��㸴�Ӷ�,ˮ��ʵ��������,ACO-Bayesian��������ȷ���Ƽн�Ϊ1/5�������ȵ���Ŀ��,�Ӷ�ΪBayesian��λ���Ʒ����Ĺ���Ӧ���ṩ��һ���·���.
�����
| [1] | ������.ˮ��Ŀ��߷ֱ淽λ���Ƽ����о�[D].����:������ҵ��ѧ,2004.Feng X A.Study on the high resolution DOA estimation techniques of underwater targets[D].Xi'an:Northwestern Polytechnical University,2004(in Chinese). |
| Cited By in Cnki (14) | |
| [2] | Tadaion A A,Derakhtian M,Gazor S,et al.A fast multiple-source detection and localization array signal processing algorithm using the spatial filtering and ML approach[J].IEEE Transactions on Signal Processing,2007,55(5):1815-1827. |
| Click to display the text | |
| [3] | Chen C E,Lorenzelli F,Hudson R E,et al.Stochastic maximum-likelihood DOA estimation in the presence of unknown nonuniform noise[J].IEEE Transactions on Signal Processing,2008,56(7):3038-3044. |
| Click to display the text | |
| [4] | Vorobyov S A,Gershman A B,Wong K M.Maximum likelihood direction-of-arrival estimation in unknown noise fields using sparse sensor arrays[J].IEEE Transactions on Signal Processing,2005,53(1):34-43. |
| Click to display the text | |
| [5] | Huang J G,Chen J F,Liu C M,et al.Bayesian approach to high resolution direction-of-arrival estimation[C]//Proceeding of the Fourth International Conference on Signal Processing.Piscataway,NJ:IEEE,1998:377-380. |
| Click to display the text | |
| [6] | Li X,Huang J G.Bayesian high resolution DOA estimator based on importance sampling[C]//Proceeding of Oceans 2005-Europe.Brest,France:Institute of Electrical and Electronics Engineers Computer Society,2005:611-615. |
| Click to display the text | |
| [7] | Djuric P M,Li H T.Bayesian spectrum estimation of harmonic signals[J].IEEE Signal Processing Letters,1995,2(11):213-215. |
| Click to display the text | |
| [8] | Viberg M,Swindlehurst A L.A Bayesian approach to auto-calibration for parametric array signal processing[J].IEEE Transactions on Signal Processing,1994,42(12):3495-3507. |
| Click to display the text | |
| [9] | Dorigo M.Optimization,learning and natural algorithms[D].Italy:Dipartimento di Elettronica,Politecnico di Milano,1992. |
| Click to display the text | |
| [10] | Socha K,Dorigo M.Ant colony optimization for continuous domains[J].European Journal of Operational Research,2008,185(3):1155-1173. |
| Click to display the text | |
| [11] | Dorigo M,Gambardella L M.Ant colony system:a cooperative learning approach to the traveling salesman problem[J].IEEE Transactions on Evolutionary Computation,1997,1(1):53-66. |
| Click to display the text | |
| [12] | Costa D,Hertz A.Ants can colour graphs[J].Journal of the Operational Research Society,1997,48(3):295-305. |
| Click to display the text | |
| [13] | Gagne C,Price W L,Gravel M.Comparing an ACO algorithm with other heuristics for the single machine scheduling problem with sequence-dependent setup times[J].Journal of the Operational Research Society,2002,53:895-906. |
| Click to display the text | |
| [14] | Corne D,Dorigo M,Glover F.New ideas in optimization[M].London,UK:McGraw-Hill,1999:63-76. |
| Click to display the text | |
| [15] | ������,�ƽ���,����.����������Ⱥ�Ż��㷨��С���ļ�Ȩ�ӿռ���Ͽ����㷨[J].��������Ϣѧ��,2011,33(4):972-976.Jiao Y M,Huang J G,Han J.Continuous ant colony optimization based weighted subspace fitting fast algorithm for DOA estimation with few snapshots[J].Journal of Electronics & Information Technology,2011,33(4):972-976(in Chinese) |
| Cited By in Cnki (8) |
