
����,
 Ϊ��nʱ��״̬�۲�ʸ��;
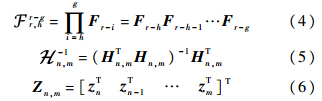
Ϊ��nʱ��״̬�۲�ʸ��; Ϊ��nʱ�̵�״̬ת�ƾ������������������������.�ٶ���nʱ�̹�������ʸ��wn��RP,��������ʸ��vn��RM�ֲ���Ϊ���ֵ��˹������,��E{wn}=0,E{vn}=0;���ٶ���������ʸ���������,�����������i,j����E{wivjT}=0.Qn=E[wnwnT]Ϊ��������Э�������,Rn=E[vnvnT]Ϊ��������Э�������.����ʱ�������,״̬�ռ�ģ�͵�״̬ת�ƾ���۲�����ΪF��H.2 ����UFIR�˲����ٶ�UFIR�˲�������ΪN,��ô���õ���nʱ�̵�����ʱ,��ʱ��m=n��N+1��ʱ��n֮���N������Ϊ��������.Ϊ�˱�֤�˲����������,��������m��0,��n��N��1.������[10]������[13]�ɵ�nʱ��Ŀ��״̬�Ĺ���ֵ���Ա�ʾΪ
Ϊ��nʱ�̵�״̬ת�ƾ������������������������.�ٶ���nʱ�̹�������ʸ��wn��RP,��������ʸ��vn��RM�ֲ���Ϊ���ֵ��˹������,��E{wn}=0,E{vn}=0;���ٶ���������ʸ���������,�����������i,j����E{wivjT}=0.Qn=E[wnwnT]Ϊ��������Э�������,Rn=E[vnvnT]Ϊ��������Э�������.����ʱ�������,״̬�ռ�ģ�͵�״̬ת�ƾ���۲�����ΪF��H.2 ����UFIR�˲����ٶ�UFIR�˲�������ΪN,��ô���õ���nʱ�̵�����ʱ,��ʱ��m=n��N+1��ʱ��n֮���N������Ϊ��������.Ϊ�˱�֤�˲����������,��������m��0,��n��N��1.������[10]������[13]�ɵ�nʱ��Ŀ��״̬�Ĺ���ֵ���Ա�ʾΪ
����
��
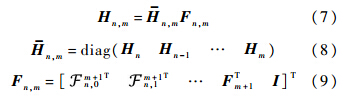
����ʱ����ϵͳ����,��ʱ����ʽ��Ϊ

����

��
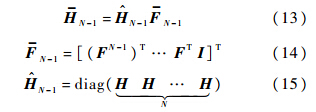
������Ľ��ܿ��Կ���,������UFIR�˲����ܹ��ں�������ͳ�����Ե�����¶��źŽ����˲�.����Ҫ���ǵ�N��1ʱ,UFIR�˲����ǽ������ŵ�.����һ����,N������������������ά�������Ӷ����¼�������������.����UFIR�˲����ܺõؽ������һ����,������[14]�ɵõ���UFIR����ʽΪ

����

����GlΪ��lʱ�̵Ĺ���������������(GNPG)[15].��ʼ����
 ��Gsͨ��������UFIR�˲������õ�:
��Gsͨ��������UFIR�˲������õ�:
��ʱ����������K<<N.����s=m+K��1����������l��m+K��n.��l=nʱ,�õ��˲����Ĺ���ֵ
 n.����ʱ����ϵͳ��ʽ��Ϊ
n.����ʱ����ϵͳ��ʽ��Ϊ
����

��ʼ����
��Gsͬ�����ɴ���ΪK��ʱ����������UFIR�˲����õ�:
����s=m+K��1,��������l��m+K��n.3 �Ľ�����UFIR�˲����ڻ���Ŀ�������,�����ij��ֻ�ʹ�������������˲����ݲ����ϴ�ƫ��.����ƫ��Ĵ�С�ܹ���ӳ�����������.����ʽ(18)��ʽ(23)���Կ���GNPGֻ��״̬ת�ƾ���۲�����й�.���ҵ���UFIR�˲���ÿһ����˲����������֮ǰN��K��������������õ���.������ͬʱ���˲������е�GNPG����һ���Ķ�����,��ʹ�ö���GNPG�ĸı��������.���Ա���ͨ�������������˲����ݵ�ƫ���������������������ϵ��(��)������Ӧ����GNPG��ֵ,�Խ�һ�����UFIR�˲������˲�Ч��.���ȣ����ڻ���ֻ���������˲����ƫ��Ĵ�С�йض��������,���Ա���ѡȡ�������˲����ƫ��ľ�������Ϊ���������Ļ�����Ϣ,��iʱ��ƫ��ľ�������ʾΪ

������ΪĿ���˶���ά��;ZiΪ��iʱ�̵���������;
iΪ��iʱ�̵��˲����;HiΪ״̬�ռ�ģ�͵Ĺ۲����.��Σ�����ֻ��ͨ����ͬʱ��ƫ��ı�ֵ���ܷ�ӳ�����������,���Ա��Ľ���һʱ��ƫ��ľ�������Ϊ��,��ʱ��ƫ��ľ���������һʱ�̵ı�ֵ����ӳ���������.���ҿ��ǵ�������ʼʱ��GNPGΪ��ʼ����������K��ʱ�̻��۵Ľ��,���������ɶ��俪K�η�.��ô��iʱ����i��1ʱ�̵ı�ֵ��ʾΪ
����ǵ�������Ϊ����ԭ�����Ұֵ������˲���ɢ.�����ڻ���һ�㶼�������������ʮ����,���Ա��IJ��öԶ�ʱ����ȡ��ֵ�ķ���������Ұֵ��Ӱ��,ͬʱ���ֲ���Ӱ��Ի���������.����ȡ��ֵ�ķ�Χ����ѡȡ������һ��.lʱ�̵Ĺ������������������ϵ����ʾΪ

����l0=l��N/2+1,N/2 ��ʾȡN/2����������.���ڱ�������l0��m+K+1,��

�Ӷ��Թ���������������ĵ���ֻ�ܴ�m+K+N/2 ʱ�̿�ʼ.ǰ���㷨�е�ʽ(18)��Ϊ

ʽ(23)��Ϊ

���㷨���Կ����˲�������ÿ����������K�η�,����Ȼ������ѵ�.��Ϊ���ŵ������̵Ľ���,��ʼ���������ȵ�Ӱ�콫���ϼ�С.����������������Ӱ��̶�������������Ӷ���С�ij̶Ⱥ��Ѷ���,�Ҹ�������1�������ܹ���֤�˲�������,����ÿ�����������η��ƺ�Ҳ��Ψһ��ѡ��.�������Ϲ��������������ϵ����Ȼ�������˲��������ٶ�,�������ڻ���Ŀ������ж�ʧĿ������ǿ��Խ��ܵ�.�������Ͽ�,���ŵ�������������,Ŀ��λ�õ�Э�������ڼ�С.���ڴ���Ŀ�����,���ԸĽ��㷨�ܹ�������Ϊ:����ʱ�̵��������˲������ƫ���ǰһʱ��Ҫ��ʱ,�����������Ŵ�ʱĿ�귢���˻���,��ô��Ӧ������GNPG������Ϣ���ߵ�Ȩ��,�Ӷ����ͻ�����ɵ��˲����.������ʱ��ƫ���ǰһʱ��Сʱ,�����˲������ȷ��,��ô�ʵ���С��Ϣ��Ȩ�ز�����Ӱ���˲�Ч��,ͬʱGNPG�ļ�С���ܹ��ӿ��˲��������ٶ�.4 ����Ŀ����ٷ��汾�ĵķ��泡��Ϊһ������Ŀ�����-ת�䳡��.����ʱ��1~ʱ��20Ϊ������,ʱ��20~ʱ��40Ϊ������,ʱ��40~ʱ��70Ϊת����,ʱ��70~ʱ��100Ϊ������,��ͼ 1��ʾ.
 |
| ͼ 1 ����Ŀ����泡��Fig. 1 Maneuvering target simulation scenario |
| ͼѡ�� |
����ϵͳ����Ϊֱ������ϵ�µİ��������ٶ�ģ��.����ʽ(1)��ʽ(2)��,״̬x����Ϊxyz�����ϵ�λ�ơ��ٶȺͼ��ٶȵ�9ά����.
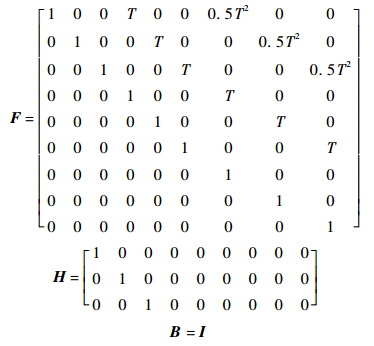
������������:

������������:
����TΪ�������,������T=0.1.���ǵ������е��κ�һ�ֻ���KF�Ļ���Ŀ������㷨(��CN,VD,IMM��),��������ԭ����ƶ�Ӧ�Ļ���UFIR�˲����ĸ����㷨,����UFIR�˲����ܹ���������ͳ�����Ե�������Ȼ����.��˷�����ֻ��KF,UFIR�˲������Ľ�UFIR�˲��������ܽ����˷���Ա�.��Ŀ��켣������һ��Э����Ϊ100�����ֵ��˹������ʱ,�������˲������ƴﵽ����.ͨ�����������ʱUFIR�˲��������Ŵ���Nopt=55[11,16],��ȡ����������K=5.100�����ؿ�������35~55 sһ�ε�λ�þ��������(RMSE)��ͼ 2��ʾ.
 |
| ͼ 2 ����������֪����µ��˲������ܶԱ�Fig. 2 Filter performances when noise statistics are known |
| ͼѡ�� |
ͨ��������Է���,������ͳ��������֪�������,KF���˲����ܱ�����UFIR�˲�������.���Ľ�UFIR�˲���������UFIR�˲��������������µ��˲�Ч�������Ƶ�.��Ҳ��֤������֪����ͳ�����Ե�������,��LMMSE����KF�����ŵ�,Ҳ����ѵ�ѡ��.��������ʵ����£�������ȷԤ֪Ŀ����˶��������ʱ�ٶ��Ĺ�������ͳ�����Կ��ܲ���ȷ.Ϊ����֤3���˲����������ֲ�ȷ�����³���ԣ�����������Э�������Ϊ16����ʱ��������ͼ 3��ʾ.
 |
| ͼ 3 ��������δ֪����µ��˲������ܶԱ�Fig. 3 Filter performances when noise statistics are unknown |
| ͼѡ�� |
�ӷ��������Կ��������ڴ�ʱ�ٶ��Ĺ�������ͳ�����Բ���ȷ��KF�Ĺ��������������.��UFIR�˲����������˲������в�����Ҫ��������ͳ�����Ե�������Ϣ���Լٶ���������ͳ�����Բ�ȷ��������ֳ��˸�ǿ��³����.���ҸĽ�UFIR�˲��������ܹ������������˲����֮���ƫ��������Ӧ������Ϣ������Ӷ����õ���Ӧ��Ŀ�����������˱�����UFIR�˲������õ��˲�����.5 �� �۱��Ľ�UFIR�˲������ڻ���Ŀ�������,���������UFIR�˲�����ȱ������˸Ľ��㷨.����������:1) ����֪��ʼ����������ͳ�Ʒֲ�������������,KF��LMMSE���±�UFIR�˲�����������.2) �������������仯������ͳ�Ʒֲ�δ֪ʱ,UFIR�˲��������KF���ֳ��˸�ǿ��³����.3) ��������ĸĽ�UFIR�˲����ܹ�����Ӧ������Ϣ�������,���ֳ������������UFIR�˲������ѵ��˲�����.4) UFIR�˲�������Щ���ƵĴ��۾��ǵ���UFIR�˲����ļ���������ΪKF��Nopt��.
�����
| [1] | Houles A,Bar-Shalom Y.Multisensor tracking of a maneuvering target in clutter[J].IEEE Transactions on Aerospace and Electronic Systems,1989,25(2):176-188. |
| Click to display the text | |
| [2] | Bar-Shalom Y,Birmiwal K.Variable dimension filter for maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,1982,18(5):621-629. |
| Click to display the text | |
| [3] | Magrill D T.Optimal adaptive estimation of sampled stochastic processes[J].IEEE Transactions on Automatic Control,1965,10(4):434-439. |
| Click to display the text | |
| [4] | Nadarajah N,Tharmarasa R,McDonald M,et al.IMM forward filtering and backward smoothing for maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(3):2673-2678. |
| Click to display the text | |
| [5] | Gibbs B.Advanced Kalman filtering,least-squares and modeling[M].New York:Wiley,2011. |
| Click to display the text | |
| [6] | Shmaliy Y S.An unbiased FIR filter for TIE model of a local clock in applications to GPS-based timekeeping[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2006,53(5):862-869. |
| Click to display the text | |
| [7] | Kwon O K,Kwon W H,Lee K S.FIR filters and recursive forms for discrete-time state-space models[J].Automatica,1989,25(5):715-728. |
| Click to display the text | |
| [8] | Kwon W H,Kim P S,Han S H.A receding horizon unbiased FIR filter for discrete-time state space models[J].Automatica,2002,38(3):545-551. |
| Click to display the text | |
| [9] | Kwon W H,Kim P S,Park P.A receding horizon Kalman FIR filter for discrete time-invariant systems[J].IEEE Transactions on Automatic Control,1999,44(9):1787-1791. |
| Click to display the text | |
| [10] | Shmaliy Y S.An iterative Kalman-like algorithm ignoring noise and initial conditions[J].IEEE Transactions on Signal Processing,2011,59(6):2465-2473. |
| Click to display the text | |
| [11] | Ramirez-Echeverria F,Sarr A,Shmaliy Y S.Optimal memory for discrete-time FIR filters in state-space[J].IEEE Transactions on Signal Processing,2014,62(3):557-561. |
| Click to display the text | |
| [12] | Song T L,Speyer J L.A stochastic analysis of a modified gain extended Kalman filter with application to estimation with bearing only measurements[J].IEEE Transactions on Automatic Control,1985,AC-30(10):940-949. |
| Click to display the text | |
| [13] | Shmaliy Y S,Ibarra-Manzano O.Time-variant linear optimal finite impulse response estimator for discrete-time state-space models[J].International Journal of Adaptive Control and Signal Processing,2012,26(2):95-104. |
| Click to display the text | |
| [14] | Shmaliy Y S.Linear optimal FIR estimation of discrete time-invariant state-space models[J].IEEE Transactions on Signal Processing,2010,58(6):3086-3096. |
| Click to display the text | |
| [15] | Shmaliy Y S,Simon D.Iterative unbiased FIR state estimation: a review of algorithms[J].Eurasip Journal on Advances in Signal Processing,2013(1):1-16. |
| Click to display the text | |
| [16] | Simon D,Shmaliy Y S.Unified forms for Kalman and finite impulse response filtering and smoothing[J].Automatica,2013,49(6):1892-1899 |
| Click to display the text |
