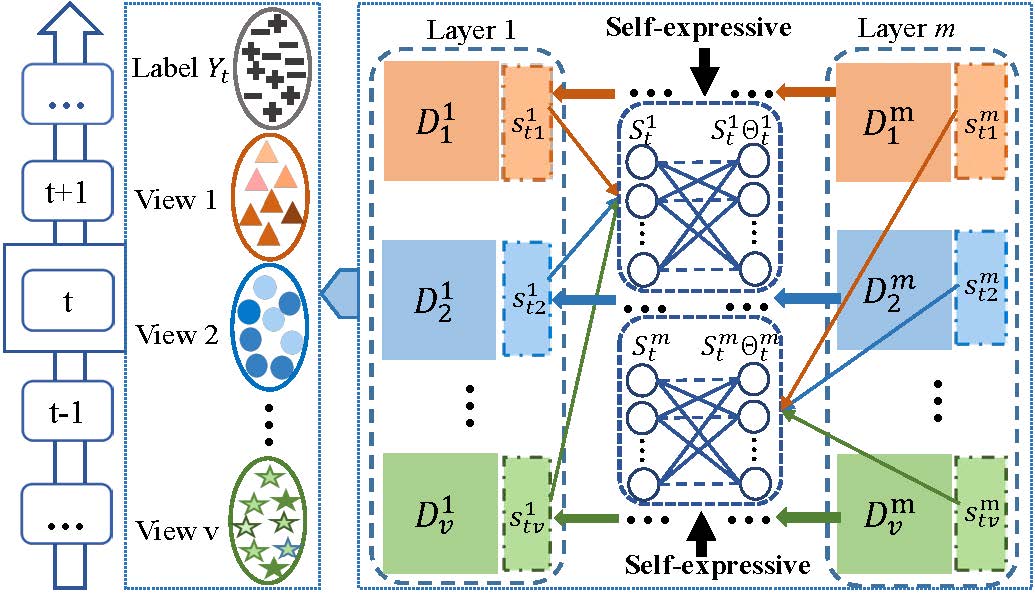
连续多视角学习模型示意图(不同颜色表示不同的视角)
为解决现存大部分的多视角任务学习模型不能快速学习新任务的问题,中国科学院沈阳自动化研究所机器人学研究室科研团队提出了一种连续多视角任务学习算法,可使机器人“更快”地认知世界。相关成果以Continual Multiview Task Learning via Deep Matrix Factorization为题发表于中科院一区期刊IEEE TRANSACTIONS ON NEURAL NETWORKS AND LEARNING SYSTEMS。
目前,基于多个任务通过多个共享视角相关联的假设,最新的多视角多任务学习在机器学习和计算机视觉领域得到了广泛的应用。然而在许多实际场景中,当多视角学习任务按序列顺序到来时,重新训练以前的任务在这种终身学习场景中会产生较高的存储需求和计算成本。为应对这一挑战,科研人员在该研究中提出了一种集成深度矩阵分解和稀疏子空间学习的连续多视角任务学习模型,称为深度连续多视角任务学习(DCMvTL)。当新的多视角任务到来时,DCMvTL首先采用深度矩阵分解技术捕捉新任务中的隐含和分层表达知识,同时以一种逐层的方式存储这些新鲜的多视角知识。在这一基础上,一种稀疏子空间学习模型应用于每一层抽取的因子矩阵上,并通过一个自表达约束捕获跨视角关联。
在基准测试数据集上的实验结果表明,深度连续多视角任务学习模型不仅能实现较高的认知准确率,同时能保持较高的学习效率,即“更快”认知不同的世界。该研究得到国家自然科学基金和机器人学重点实验室的支持。(机器人学研究室)
