
报告现场
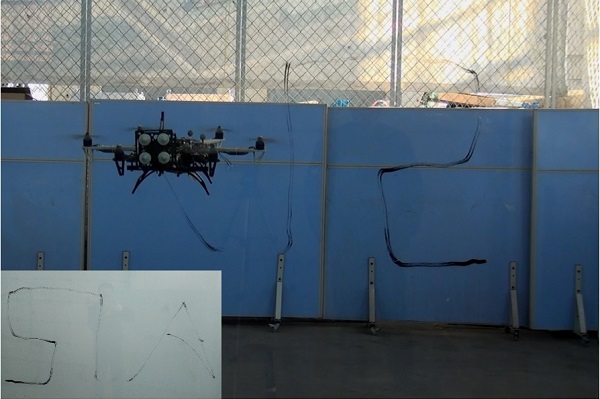
空中“写字”SIA
近年来,旋翼飞行机器人已经从空中观测型发展成为作业型空中飞行系统,其中接触环境时的力控制和移动接触作业是难点问题,中国科学院沈阳自动化研究所课题组对此展开了研究工作。相关成果已经发表在《Robotica》、《IEEETransactionsonIndustrialElectronics》等期刊,并在刚刚结束的智能机器人与系统国际会议上(2019IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems,IROS2019)上进行了宣读。
为实现接触作业时的力控制,研究所机器人学研究室自主机器人课题组科研人员,首先通过控制策略将飞行机器人变成一个类弹簧系统并进而控制其实现移动接触作业。目前,科研人员已经开发出具有多种功能的作业型飞行机器人系统,能够实现静态接触环境时的末端动态力控制,改型机器人系统可完成按键开关电灯、抓取动态目标、恒力接触滑行等演示。
作业型飞行机器人具有广泛的应用前景,能够帮助人们完成一些附着式作业任务,比如基础设施外墙检修,或高空高海拔等人类不可达区域的科考采样等任务。(机器人学研究室)
