1.School of Information and Communication Engineering, North University of China, Taiyuan 030051, China 2.Shanghai Institute of Applied Physics, Chinese Academy of Sciences, Shanghai 201800, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 11375257, 61301259, U1232205) and the Foundation of North University of China (Grant No. 2015110246).
Received Date:18 August 2018
Accepted Date:15 October 2018
Available Online:01 January 2019
Published Online:20 January 2019
Abstract:X-ray three-dimensional (3D) imaging technology is a research hotspot in the field of X-ray imaging. However, for some special imaging targets, the imaging mode of the traditional computer?tomography (CT) circular trajectory is prone to lack of projection information, and thus affects the quality of CT reconstruction images, which limites the application of CT imaging. Light field imaging technology, in which a microlens array is inserted between the sensor and main lens in a traditional camera, achieves four-dimensional (4D) light field data with sensor during imaging including both the two-dimensional (2D) directional information of the radiance propagation and 2D spatial distribution information of object radiation. Through computer calculation imaging, 3D imaging such as digital refocusing, slice in the depth direction, stereo imaging, and depth estimation is realized. This article focuses on the 3D X-ray imaging based on the theory of light field imaging in visible light. Based on the model of parallel X-ray of synchrotron radiation source, the data of the X-ray light field with many projection views are acquired by rotating the image sample. Then, the light passing through any voxel in the imaging target is acquired by a geometric projection method, and based on integral imaging theory of light field imaging, the gray value of the slice in depth dimension is reconstructed and the depth information of reconstructed target is acquired. The reconstruction results show that this method can be used to reconstruct the internal slices at any depth in any viewing direction of the imaging target. In the optical imaging, the scene beyond the depth of field is blurred, making the scene more prominent and the imaging effect better. However, for the X-ray imaging, the imaging mode that is completely transmissive, and the light passing through the foreground carry the information about the background. In the refocusing process, the object at the refocusing depth is focused, and other background information is defocused. Excessive background information overwhelms the real useful information, and makes the slice, especially the edge of the image, blurred. Consequently more severe background noise is introduced due to the defocusing phenomenon in the optical refocusing process. Referring to the reconstruction method of the X-ray 3D imaging and light field imaging, the S-L filter is applied to the original data in the article. After filtering the original data, the X-ray "light field refocusing" is processed. The reconstruction results shown that the method can effectively eliminate reconstruction artifacts and improve image reconstruction quality in the reconstruction depth slice. And in this paper, the light field data are collected by rotating the sample with low time resolution. For the fast imaging, according to the digital refocusing theory of the light field imaging, the array X-ray source and detector can be used. After being calibrated, the system can realize the 3D reconstruction of the light field of the target field with high time resolution. This research has not only the theoretical significance in algorithm, but also great application value in the rapid detection of more complicated targets such as industry and medical treatment. Keywords:X-ray imaging/ light field imaging/ sliced base on depth/ three-dimensional reconstruction
通过对每一点进行积分, 可以重建得样品空间每一个体素的值. 当固定$x'$时, 遍历$\theta $, 并按照(8)式计算积分将会得到如图2所示的$\varphi = 0$视角下, 固定深度$x'$处所对应的切片. 在重建过程中, 当初始坐标$(x',y',z')$与参考坐标系$(x,y,z)$不重合时, 即$x'$轴与$x$轴所在坐标系有一夹角$\varphi $, 首先需通过坐标变换, 将坐标系$(x',y',z')$变换到$(x,y,z)$坐标系, 然后积分遍历$\theta $将会得到$\varphi $度投影时的深度切片, 即此方法可以实现对样品不同视角的直接深度切片. 3.实验结果为了验证本文方法的准确性和正确性, 通过MATLAB模拟仿真的方式建立如图2所示的成像系统. 在系统中, 成像探测器的空间分辨率为256 × 50, 采用基于同步辐射的平行X射线束作为成像光源, 成像目标为堆叠了50层的MATLAB自带Shepp-Logan头骨模型, 在投影角度为0—180°范围内任意选取了64个角度, 各个角度及其投影数据如图3所示. 图 3 投影数据图 (a) 随机选取的64个投影角度; (b)图(a)中所有角度下的投影图中某一排像素图像组成的正弦图 Figure3. Projection data: (a) 64 random projection angles; (b) sinogram of some pixel image of projection in Fig.(a) under all angles.
图3(a)横坐标为投影编号, 纵坐标为投影所对应的角度坐标信息, 图3(b)为投影图像所对应的正弦图. 通过(8)式, 对投影数据进行重聚焦, 不同深度重聚焦结果和变视角的重聚焦结果如图4所示. 图 4 数字重聚焦结果 (a) Shepp-Logan模型; (a)中i线(b)、ii线(c)、iii线(d)和iv线(e)所在处的深度切片 Figure4. Digital refocus result: (a) Original Shepp-Logan phantom; depth slices where i line (b), ii line (c), iii line (d) and iv line (e) are located in Fig.(a).
光场成像重聚焦过程中, 通过选择不同的$x'$可以对样品进行深度切片. 如图4(b)为图4(a)中i线所在处的深度切片, 图4(c)为图4(a)中ii线所在处的深度切片, 其中在此深度切片中, 纵坐标为图像尺寸, 横坐标为成像目标堆叠的层数. 光场成像能够变换视角并在相应视角下对成像目标进行深度切片, 如图4(d)为图4(a)中iii线所在处的深度切片(视角$\varphi =45$°); 图4(e)为图4(a)中iv线所在处的深度切片(视角$\varphi = 90$°). 在光学成像的聚焦过程中, 超出景深范围的景物将会虚化, 使得准确聚焦景物更加突出, 成像效果更好, 当视场中的前后景物间存在相互遮挡时, 被遮挡的后景发出的光线将不会对成像有影响, 使得其对前景的重聚焦图像没有任何贡献. 但是X射线成像属于完全透射的成像模式, 如图2所示, 经过前景的光线必然会携带后景的信息. 在重聚焦过程中, 所在重聚焦深度的物体会被聚焦, 其他背景信息会处于离焦状态, 过多的背景信息会淹没图像中真正的有用信息, 使得切片中整个图像, 尤其是图像的边缘不再清晰, 对成像非常不利, 如图4(b)—(e)的重聚焦结果中, 虽然能从深度切片中看到样品的特征信息, 但是Shepp-Logan模型特征信息非常不清晰, 边界也很模糊. 尤其对于图4(e)的切片, 原始数据的细节信息很丰富, 但是此切片中很模糊, 细节信息未得到很好的体现. 为提高成像效果, 增加重聚焦图像及其边缘清晰程度, 通过对原始数据进行滤波的方式, 可以消除背景的影响, 图5为添加了R-L滤波器后光场重聚焦结果. 图 5 经R-L滤波器滤波后的数字重聚焦结果 (a) Shepp-Logan模型; (a)中i线(b)、ii线(c)、iii线(d)和iv线(e)所在处的深度切片 Figure5. Digital refocus result after filtering by R-L filter: (a) Original Shepp-Logan phantom; depth slices where i line (b), ii line (c), iii line (d) and iv line (e) are located in Fig.(a).














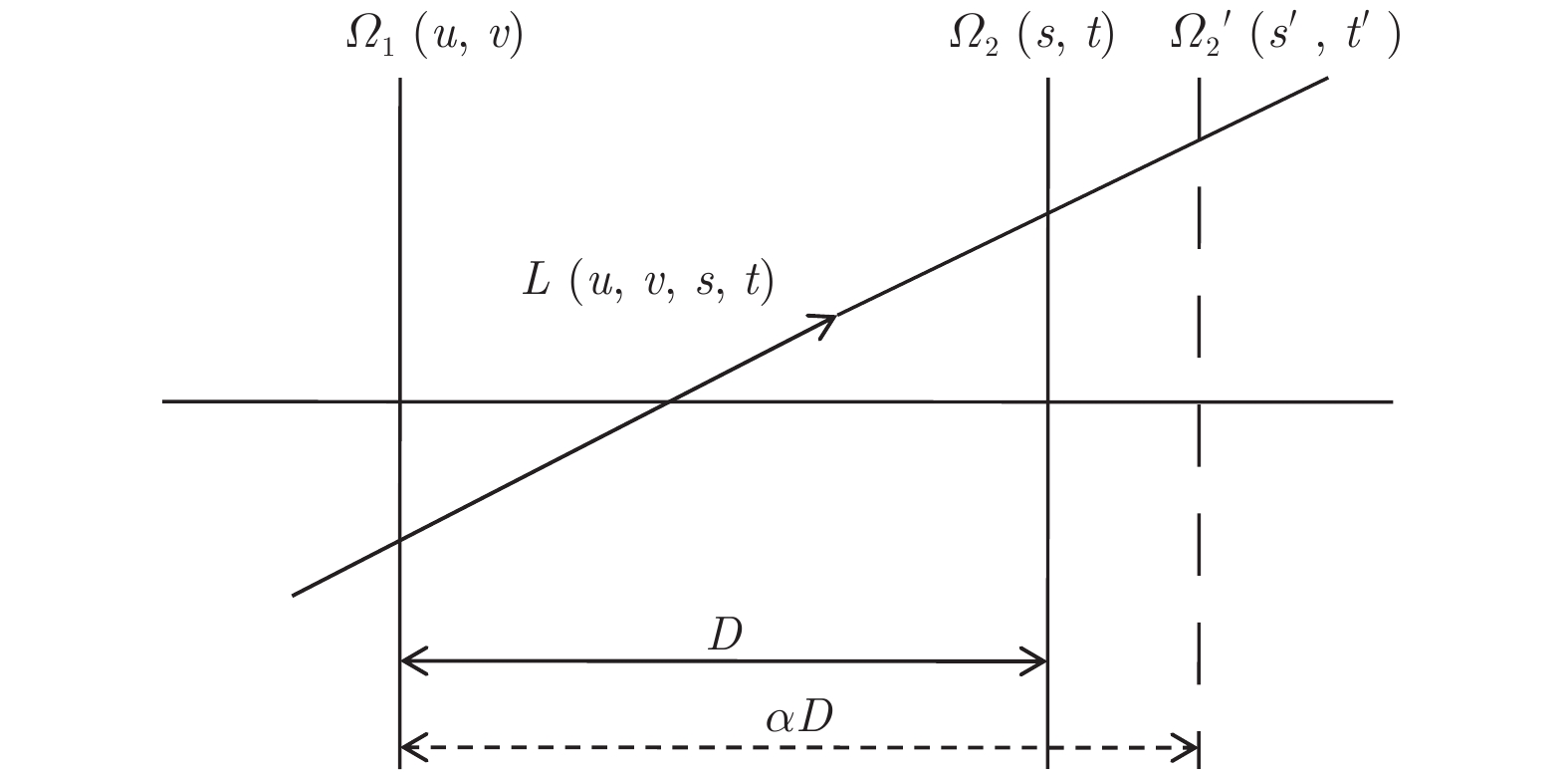 图 1 光场成像原理示意图
图 1 光场成像原理示意图







 图 2 X射线光场成像系统模型示意图
图 2 X射线光场成像系统模型示意图
































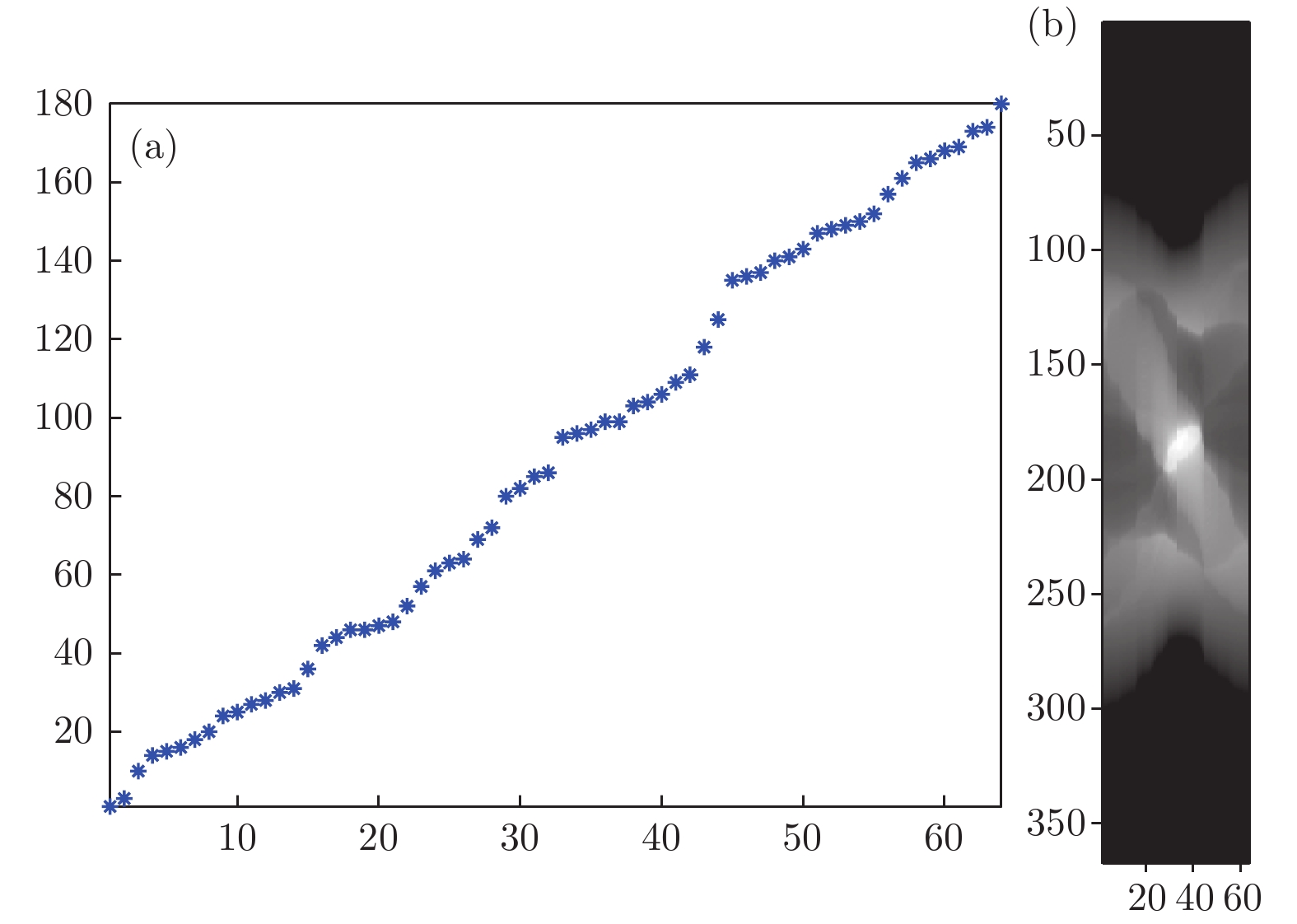 图 3 投影数据图 (a) 随机选取的64个投影角度; (b)图(a)中所有角度下的投影图中某一排像素图像组成的正弦图
图 3 投影数据图 (a) 随机选取的64个投影角度; (b)图(a)中所有角度下的投影图中某一排像素图像组成的正弦图 图 4 数字重聚焦结果 (a) Shepp-Logan模型; (a)中i线(b)、ii线(c)、iii线(d)和iv线(e)所在处的深度切片
图 4 数字重聚焦结果 (a) Shepp-Logan模型; (a)中i线(b)、ii线(c)、iii线(d)和iv线(e)所在处的深度切片


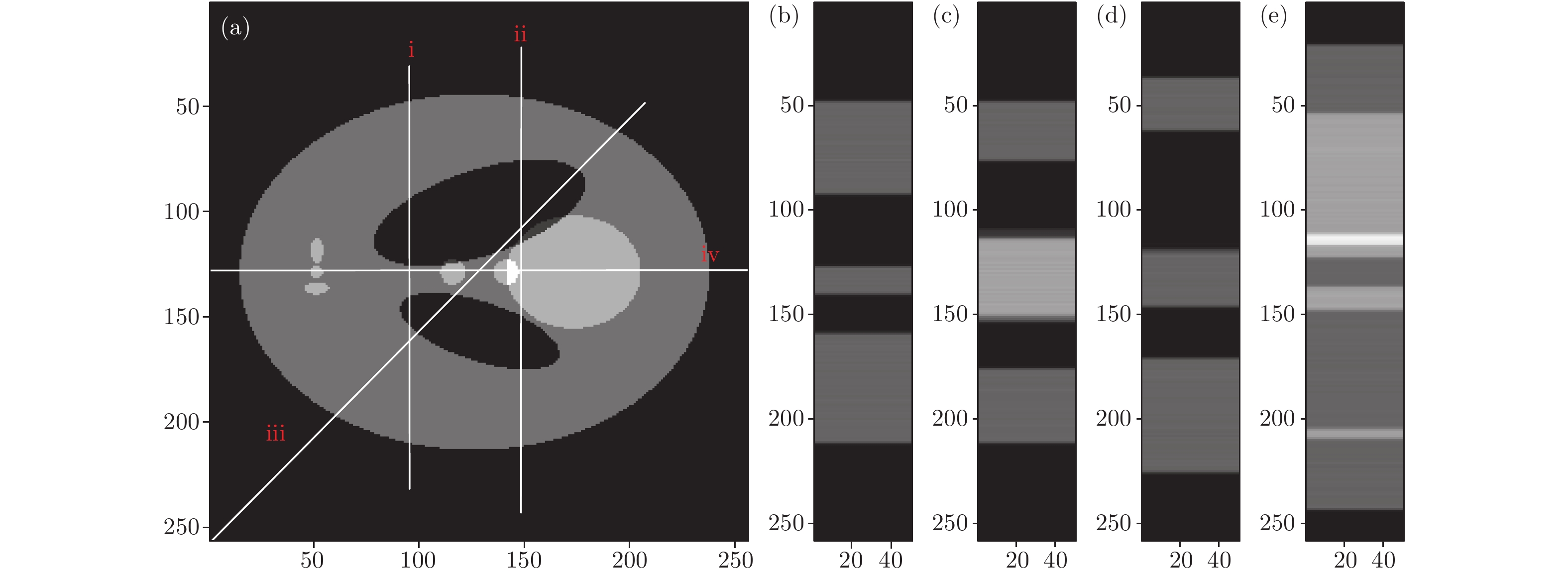 图 5 经R-L滤波器滤波后的数字重聚焦结果 (a) Shepp-Logan模型; (a)中i线(b)、ii线(c)、iii线(d)和iv线(e)所在处的深度切片
图 5 经R-L滤波器滤波后的数字重聚焦结果 (a) Shepp-Logan模型; (a)中i线(b)、ii线(c)、iii线(d)和iv线(e)所在处的深度切片


