
 , 李道京1, 周建卫1,2
, 李道京1, 周建卫1,21. 中国科学院电子学研究所微波成像技术国家重点实验室, 北京 100190;
2. 中国科学院大学, 北京 100049
2016年03月04日 收稿; 2016年04月05日 收修改稿
基金项目: 中国科学院电子学研究所创新项目(Y3Z0120247)资助
通信作者: 胡烜 E-mail: 18700476546@163.com
摘要: 将低采样率数字去斜技术用于合成孔径激光雷达(SAL),大幅度降低了系统的AD采样率.在此基础上,分析线性调频连续波(LFMCW)体制SAL系统的信号采样和成像处理问题.为降低回波延时误差带来的影响,给出一种延时估计方法.该方法通过截取单个扫频周期信号的回波进行去斜脉压,得到场景对应的延时;针对线性调频(LFM)信号的非线性失真,使用剩余视频相位(RVP)滤波法进行信号校正,保证去斜脉压质量.仿真实验验证了将低采样率数字去斜应用于SAL的可行性.
关键词: 数字去斜合成孔径激光雷达AD采样延时误差信号校正成像处理
Image processing of SAL based on low sampling rate digital dechirp
HU Xuan1,2
, LI Daojing1, ZHOU Jianwei1,2 1. National Key Lab of Microwave Imaging Technology, Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China;
2. University of Chinese Academy of Sciences, Beijing 100049, China
Abstract: In this study, low sampling rate digital dechirp is used in SAL to decrease AD sampling rate of the system. On this basis, signal sampling and imaging processing are analyzed. To depress the influence of time delay error, a method for time delay error estimation is proposed. This method estimates time delay through dechirp with part of echo signal. To ensure the quality of pulse compression, a method based on RVP filtering is used to correct nonlinear distortion of the LFM signal. The feasibility of applying the low sampling rate digital dechirp in SAL is verified by simulations.
Key words: digital dechirpSALAD samplingtime delay errorsignal correctingimage processing
合成孔径激光雷达(SAL)结合合成孔径技术和激光波长短的特点,在超高分辨率观测领域发展前景广阔[1],但也存在数据量巨大的问题.文献[2]给出机载SAL系统参数:快时间采样率4 GHz,重复频率大于80 kHz.如此高的二维采样率导致的大数据量,给回波存储和成像处理都带来了困难.
由于激光波束窄,SAL成像场景幅宽小,使用LFM信号时,去斜接收可降低AD采样率和成像数据量[3].模拟去斜需要复杂的延时控制电路,且采样率受延时误差影响,为简化系统并进一步降低采样率,本文将低采样率数字去斜技术[4]应用于SAL.
1 采样率分析为降低峰值功率,机载SAL通常采用线性调频连续波(LFMCW)体制,这为使用数字去斜提供了条件,依据文献[2],本文确定的机载SAL系统参数如表 1所示.为避免方位多普勒模糊,本文采用100 kHz的高重频,对应10 μs的扫频周期;由于激光距离向波束较窄,场景幅宽远小于扫频周期对应的宽度,在3 km范围,存在的距离模糊可自动去除.
Table 1
| 表 1 机载SAL系统参数Table 1 System parameters of airborne SAL |
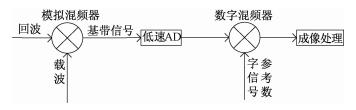
图 1给出低采样率数字去斜的原理框图.文献[4]从原理上证明并仿真验证了,若采样率大于模拟去斜时场景幅宽对应的谱宽,使用低采样率数字去斜技术,可获得全分辨率的脉压结果.
Fig. 1
 | Download: JPG larger image |
图 1 低采样率数字去斜原理框图 Fig. 1 Diagram of digital dechirp with low sampling rate | |
模拟去斜时,采样率的选择应综合考虑场景幅宽、延时误差和信号非线性失真的影响,采样率应满足
| ${{f}_{s}}\ge \gamma \left( \frac{2\Delta {{R}_{w}}}{C}+\frac{2\Delta {{R}_{\varepsilon }}}{C} \right)+\Delta {{f}_{s}},$ | (1) |
低采样率数字去斜时,由于去斜操作由后续信号处理实现,生成回波矩阵前,可由回波数据估计延时范围,所以采样率的选择只需要考虑场景幅宽和信号非线性的影响,采样率应满足
| ${{f}_{s}}\ge \gamma \frac{2\Delta {{R}_{w}}}{C}+\Delta {{f}_{s}}.$ | (2) |
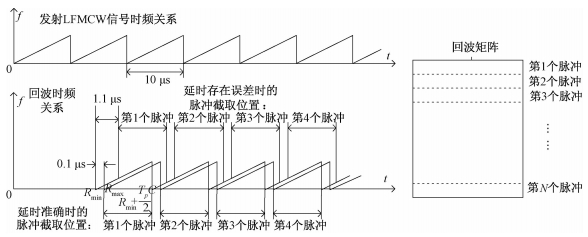
2 延时估计和回波矩阵形成LFMCW体制下,信号的收发连续进行,需要对连续的回波信号进行裁剪,获得等效的脉冲信号,然后形成二维回波矩阵以进行后续的成像处理.信号裁剪的时序关系如图 2所示,假设场景最小延时为Rmin,最大延时为Rmax,回波矩阵中每个脉冲的起止时间应为单个扫频周期信号发射后
Fig. 2
 | Download: JPG larger image |
图 2 信号时频关系和回波矩阵示意图 Fig. 2 Schematic diagram of signal time-frequency relationship and echo matrix | |
回波信号的延时范围可由载机和场景的GPS位置信息换算得到,其误差通常较小,但是由于飞机高度和横滚角变化,机载SAL获取数据时,回波延时最大可能存在150 m左右的误差,对应1 μs的时序错位.SAL重复频率高,扫频周期较短,延时误差会造成较大的能量损失.如图 2所示,由表 1给出的系统参数,若延时精确已知,能量损失仅来自场景幅宽,为0.1 μs/10 μs=1%;若存在150 m的延时误差,能量损失增大为1.1 μs/10 μs=11%.
为降低能量损失,在形成回波矩阵前,需取同一扫频周期信号的回波去斜脉压以进行延时估计.设由GPS数据换算得到的延时为[R, R+ΔRw],最大延时误差为ΔRε,考虑极限情况:若延时提前ΔRε,那么延时区间[R+ΔRε+ΔRw, R+ΔRε+
3 基于RVP滤波的信号非线性失真校正实际工程中,SAL发射的LFM信号线性度往往较差[2],本文使用基于RVP滤波的方法进行信号校正[5-6].
设点目标到雷达的距离为Ri,该目标反射的回波为
| $\begin{align} & {{s}_{r}}\left( t \right)=\text{rect}\left( \frac{t-2{{R}_{i}}/C}{{{T}_{p}}} \right)\cdot {{\text{e}}^{\text{j}2\text{ }\!\!\pi\!\!\text{ }\left\{ {{f}_{c}}\left( t-2{{R}_{i}}/C \right)+\frac{1}{2}\gamma {{\left( t-2{{R}_{i}}/C \right)}^{2}} \right\}}}\cdot \\ & {{\text{e}}^{\text{j}2\text{ }\!\!\pi\!\!\text{ }\!\!\varepsilon\!\!\text{ }\left( t-2{{R}_{i}}/C \right)}}, \\ \end{align}$ | (3) |
以Rref为参考斜距对该回波去斜,设RΔ=Ri-Rref,去斜后的差频输出为
| $\begin{align} & {{s}_{if}}\left( t \right)={{s}_{r}}\left( t \right)\cdot s_{\text{ref}}^{*}\left( t \right) \\ & =\text{rect}\left( \frac{t-2{{R}_{i}}/C}{{{T}_{p}}} \right)\cdot {{\text{e}}^{-\text{j}\frac{4\text{ }\!\!\pi\!\!\text{ }}{C}\gamma \left( t-\frac{2{{R}_{\text{ref}}}}{C} \right)R\Delta }}\cdot \\ & {{\text{e}}^{-\text{j}\frac{4\text{ }\!\!\pi\!\!\text{ }}{C}{{f}_{c}}R\Delta }}\cdot {{\text{e}}^{\text{j}\frac{4\text{ }\!\!\pi\!\!\text{ }}{{{C}^{2}}}R_{\Delta }^{2}}}\cdot {{\text{e}}^{j2\text{ }\!\!\pi\!\!\text{ }\varepsilon \left( t-2{{R}_{i}}/C \right)}}. \\ \end{align}$ | (4) |
| $\begin{align} & {{S}_{if}}\left( f \right)=\left\{ {{T}_{p}}\sin c\left[ {{T}_{p}}\left( f+2\frac{\gamma }{C}R\Delta \right) \right]\cdot \right. \\ & \left. {{\text{e}}^{-\text{j}\left( \frac{4\text{ }\!\!\pi\!\!\text{ }fc}{C}R\Delta +\frac{4\text{ }\!\!\pi\!\!\text{ }\gamma }{{{C}^{2}}}R_{\Delta }^{2}+\frac{4\text{ }\!\!\pi\!\!\text{ }f}{C}R\Delta \right)}} \right\}\otimes FT\left\{ {{\text{e}}^{\text{j2 }\!\!\pi\!\!\text{ }\varepsilon \left( t-\frac{2R\Delta }{C} \right)}} \right\}, \\ \end{align}$ | (5) |
| $\begin{align} & {{S}_{if}}\left( f \right)={{T}_{p}}\cdot {{\varphi }_{\varepsilon }}\left( f+2\frac{\gamma }{C}R\Delta \right)\cdot \\ & {{\text{e}}^{\text{j}\frac{\text{ }\!\!\pi\!\!\text{ }}{\gamma }{{f}^{2}}}}\cdot {{\text{e}}^{\text{-j}\frac{\text{4 }\!\!\pi\!\!\text{ }{{f}_{c}}}{C}R\Delta }}, \\ \end{align}$ | (6) |
| ${{S}_{if}}\left( t \right)={{T}_{p}}\cdot {{\text{e}}^{\text{j2 }\!\!\pi\!\!\text{ }\varepsilon \left( t \right)}}\cdot {{\text{e}}^{\text{-j}\frac{\text{4 }\!\!\pi\!\!\text{ }{{f}_{c}}}{C}R\Delta }}\cdot {{\text{e}}^{\text{-j2 }\!\!\pi\!\!\text{ }\frac{2\gamma R\Delta }{C}t}}.$ | (7) |
| ${{s}_{if}}\left( t \right)={{T}_{p}}\cdot \sin c\left( f+\frac{2\gamma {{R}_{\Delta }}}{C} \right)\cdot {{\text{e}}^{\text{-j}\frac{4\text{ }\!\!\pi\!\!\text{ }{{f}_{c}}}{C}{{R}_{\Delta }}}}.$ | (8) |
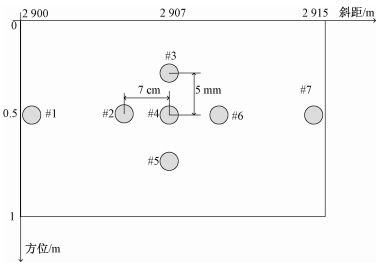
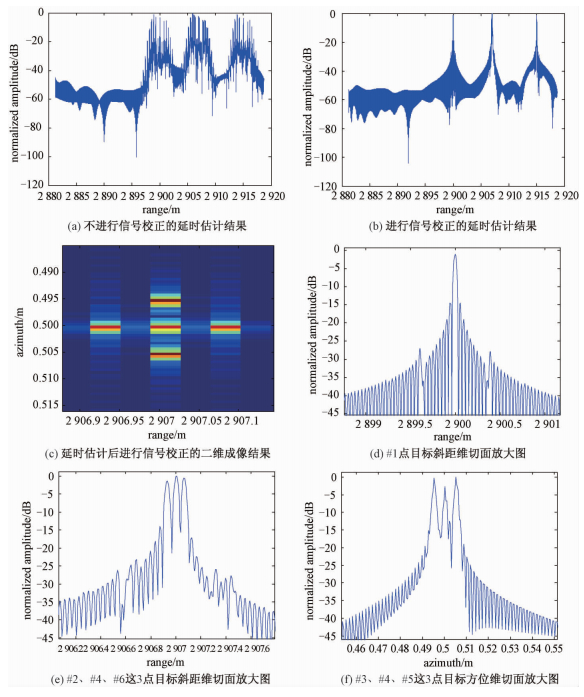
表 2给出本文的仿真参数,点目标位置及编号如图 3所示,场景中心的5个点目标斜距间隔7 cm,方位间隔5 mm.对比图 4(a)和图 4(b),RVP滤波法对信号进行了有效的非线性失真校正.校正后,延时估计精度有所提高;图 4(c)是场景中心的成像结果,可以看出5个点目标得到了清楚分辨;图 4(d)给出斜距最近的#1点目标的斜距维切面放大图(斜距最远的#7点目标与之基本相同,不再给出);图 4(e)给出#2、#4、#6这3点目标的斜距维切面放大图;图 4(f)给出#2、#4、#6这3点目标的方位切面放大图;可以看出,数字去斜并进行非线性失真校正后,脉冲压缩的主副瓣分布情况和高速采样下LFM信号脉压情况基本一致,斜距向和方位向均达到了预期分辨率.低采样率数字去斜应用于SAL的可行性得到验证.
Fig. 3
 | Download: JPG larger image |
图 3 点目标位置示意图 Fig. 3 Schematic diagram of target location | |
Table 2
| 表 2 仿真参数Table 2 Simulation parameters |
Fig. 4
 | Download: JPG larger image |
图 4 采样和成像仿真结果 Fig. 4 Simulation results of sampling and imaging | |
5 结束语本文将低采样率数字去斜技术应用于SAL;分析系统的快时间采样率;给出成像处理流程.仿真验证了低采样率数字去斜应用于SAL的可行性.在本文参数下,对带宽4 GHz,线性度1/1 000的信号,快时间采样率设置为100 MHz即可满足要求,大幅度降低了SAL系统的数据量;若将快时间采样率设置为200 MHz,可使用单路AD实施采样,进一步简化系统.本文的研究工作对SAL的工程研制具有一定的参考价值.
参考文献
| [1] | Brian W K, Joe B, Chris R. Synthetic aperture ladar flight demonstration[C].OSA/CLEO 2011:1-2. |
| [2] | 李道京, 张清娟, 刘波, 等. 机载合成孔径激光雷达关键技术和实现方案分析[J].雷达学报, 2013, 2(2):143–151. |
| [3] | 杜剑波, 李道京, 马萌. 激光雷达宽带信号产生方法研究[J].中国激光, 2015, 42(11):1–10. |
| [4] | 詹学丽, 王岩飞, 王超. 一种用于合成孔径雷达的数字去斜方法[J].雷达学报, 2015, 4(4):474–480. |
| [5] | 梁毅. 调频连续波SAR信号处理[D]. 西安:西安电子科技大学, 2009. |
| [6] | 于雯, 赵思伟, 宋小全. 一种适用于合成孔径激光雷达非线性啁啾校正的频率变标成像方法[J].激光与光电子学进展, 2013, 50(7):1–6. |
| [7] | 梁淮宁, 金廷满, 赵毅. SAR内定标技术和内定标精度分析[J].电子学报, 2007, 35(12):2294–2297. |
| [8] | 杨震, 杨汝良. HJ-1-C卫星SAR系统的内定标[J].雷达学报, 2014, 3(3):314–319. |
| [9] | 潘舟浩, 刘波, 李道京. 毫米波三基线InSAR系统误差校正和信号分析[J].电子与信息学报, 2011, 33(10):2464–2470. |
| [10] | 邢孟道, 保铮, 李真芳, 等. 雷达成像算法进展[M].北京: 电子工业出版社, 2014: 24-30. |
| [11] | 陆必应, 梁甸农. 调频线性度对线性调频信号性能影响分析[J].系统工程与电子技术, 2005, 27(8):1384–1386. |

{kind=link}
{kind=link}
{kind=link}
{kind=link}