 , ������1, ϰ����2
, ������1, ϰ����21. ���ӿƼ���ѧ��Դ�뻷��ѧԺ, �ɶ� 611731;
2. �й���ѧԺң�������ֵ����о������ֵ����ص�ʵ����, ���� 100094
2015��09��23�� �ո�; 2016��03��15�� ���ĸ�
������Ŀ: ���ҿƼ����ش��ѧ��������ר�2013YQ120343�������ص�����о���չ�ƻ���973�ƻ�����2013CB733405������
ͨ������: ����
ժҪ: ���ؼ����״\���Ѿ���Ϊ���ٻ�ȡ���н�����ά����ģ�͵���Ч�ֶΣ����������ݶ�������ȡ���ǽ�������ά����ģ���ؽ��Ĺؼ���Ϊ��Ч��ֲ����ǽ����ƣ��Լ�������������Խ���������ȡ���ȵ�Ӱ�죬���һ�ֲ��ʽ�ݶ�������ȡ���������ȶ�LiDAR���ƽ����˲����ڴ˻��������õ��ƻز����Ժ͵��Ʒ�������Ⲣɾ���ǵ�������������Ե�ֲ����ͽ�����ǽ��㣬Ȼ��������ͨ�ɷַ������Էǵ�������õ���ʼ�����㣬�����DTM�����ý���������߶���Ϣ����õ��������ݶ����ơ�����������������������Ч�شӻ��ص��������п�����ȡ�����ݶ����ƣ���Ч�ʿɴ�85%���ϡ�
�ؼ���: ����LiDAR�����˲��������ݶ���ȡ
Building roof point extraction based on airborne LiDAR data
LI Liang1,2, WANG Cheng2
, LI Shihua1, XI Xiaohuan2 1. School of Resources and Environment, University of Electronic Science and Technology of China, Chengdu 611731, China;
2. Key Lab of Digital Earth, Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, Beijing 100094, China
Abstract: Airborne LiDAR technology is an effective method for obtaining three-dimensional spatial data of buildings with high point density and accuracy, and building roof point cloud extraction is a key process in three-dimensional digital reconstruction.This study proposes a gradually advanced method to extract building roof points.Firstly, most of vegetation points and building wall points are removed by using multiple echo and normal characteristics, which are based on filtering results.Secondly, the remaining points are segmented into clusters by using Euclidean clustering method.Finally, by combining with a digital terrain model (DTM), the points on building roofs are isolated using the building area and height characteristics.The results show that the proposed method extracts roof points based on raw LiDAR data efficiently.
Key words: airborne LiDARpoint cloudfilterbuildingroof point extraction
���ų��еĿ��ٷ�չ�������������Ƴ��ʺ�������չ�ġ����ֳ��н��衱��չս�ԣ����н�������ά�����ؽ������е���Ҫ����.����LiDAR(airborne light detection and ranging)��������ֱ�ӡ����ٻ�ȡ���������߾��ȡ����ܶȵ���ά�ռ���Ϣ���ǵ�ǰ���н�����ά�����ؽ���Ҫ��������Դ.
�ӻ���LiDAR�������ݽ��н��������ؽ��Ĺؼ�����δ�ԭʼ�ĺ����������Զ������١�ȷ����ȡ��������ƣ���Ҳ���ؽ��߾�������ģ�͵Ļ���.������ܶ�****��չ�˴���������о����������[1]���ý�����������������ݵĸ߲���¶���Ϣ�������ɴֵ�ϸ�Ľ������Զ���ȡ��Rottensteiner[2]�Ե������ݲ�ֵ���Ƚ����Ƶõ����ֱ���ģ��(DSM)�����ֵ���ģ��(DTM)��Ȼ���ϵ��Ƹ̲߳������̬ѧ���ӵȷ�����ȡ��������ƣ�Sun��[3]�������õ��Ƶķ����������ֲ����Ȼ��ͨ���ֲ�ʽ����õ���������ƣ�Awrangjeb��Fraser[4]����ԭʼ���Ƶĸ̲߳���õ������ͷǵ���㣬�ٸ��ݵ�����н�����ı�������Լ��������������߶ȵ���Ϣ��ȡ���������.Richter��D��llner[5]���û���ƽ��Լ�������������㷨�Ե��ƽ��зָȻ���ۺ�������߲����ֵ�����ڶ�ͨ�������㷨�Էָ������з��࣬ʵ�ֽ�������Ƶ���ȡ.Ҳ��Щ����[6-7]��ϵ���������Ϣ(��ز�������ǿ�ȵ�)����ֲ��.����ֱ�����õ���������ϢҲ����ɽ����ݶ��Ĵ��֣����������λز����ݶ��߽�㱻����Ϊֲ����.ͬʱ����LiDARϵͳ�Ե������ɨ��ʱ����ɨ�跽�������Ӱ����ȡ�����ֽ�����ǽ����ƣ����е�һЩ��ȡ������������ǽ����ƶ��ݶ�������ȡ��Ӱ�죬�ر�����Χ��ֲ���Ľ�������ǽ����ƵĴ��ڻᵼ�½�������ֲ�����ָ�����.
����������⣬���ĴӶ���ͬ���Ժ������Գ�������Ŀ�������ռ���Ϊ����õ�������Ϣ(��ز��������ռ�ֲ�����)������Դ��ͨ���������������������Ľ�ϣ��Լ����ڵ�������������������Ľ�ϣ�����һ�ִӻ���LiDAR�����в��ʽ��ȡ�����ݶ��ķ�������������Чȥ��ֲ�����ǽ��㣬���ҿ��ǵ������Ӱ�죬����˽���������ȡ��Ч�ʺ;���.
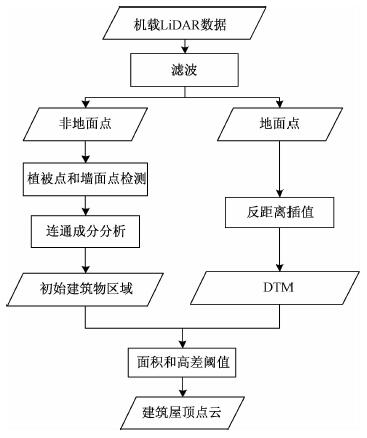
1 �������ʽ�����ݶ�������ȡ������ͼ 1��ʾ����Ҫ������ԭʼ�����еõ�������ƺͷǵ�����ơ����ֲ�����ǽ��㡢��ȡ��ʼ�������ơ��Ե�����ֵ����DTM���Լ���ʼ������������DTM�õ��������ݶ�����.
Fig. 1
 | Download: JPG larger image |
| ͼ 1 ��������ȡ����ͼFig. 1 Flow chart of building roof point extraction | |
1.1 �����˲�Ŀǰ�����˲��㷨�϶࣬�ϳ��õ����¶��˲���������������(TIN)�˲�������̬ѧ�˲���.����ѡ��ʽ��̬ѧ�˲��㷨[8]���������ƺͷǵ�����ƣ�����ÿ�����(�ȸ�ʴ������)�������ö�߶ȵ��˲����ڽ��е������㣬�㷨����Ч�����ȸߣ����һ��ܹ�ȥ��һЩ�����㣬���巽������.
���ȸ��ݵ���ƽ����࣬��ԭʼ�����������������Ϊ���ģ�����w��w��С���˲����ڣ�Ѱ�Ҵ����ڵ�����С�߳�ֵ��������ֵ��Ϊ��ʴ��ĸ߳�ֵ.Ȼ�����ɢ��ȡͬ����С���˲����ڣ����������߳�ֵ��Ϊ���ͺ�ĸ߳�ֵ���Ƚ���������ͺ�ĸ߳�ֵ�����Ӧ��ԭʼ�߳�ֵ֮��ݴ��жϸõ�Ϊ����㻹�Ƿǵ����.Ȼ��ı��˲����ڴ�С�����ж�ε������㣬�ڵ��������������ڳߴ�(�������Ի�ָ����ʽ)�����շ���������ǵ����[9].
1.2 ֲ�����ǽ����⼤����д�����������ֲ����Ϊ���ڼ�϶�������λز�����������������һ�λز����ʿ������õ���ز���������ֲ���ͽ�����.����ֱ�����õ��ƻز�����������ֲ���ͽ��������ɽ�������Ƶ�ȱʧ����Ϊ�����ڽ����ݶ���Ե���ᷢ�����䣬���²��ֱ�Ե��Ҳ���ж�λز����������ж�λز��Ľ����ݶ��߽�㱻���Ϊֲ����.��˱��о���ͬ���Գ������ڼ�����ƻز�����ʱ����������Ӱ�죬�������ڶ�λز���ı����� Ϊ��Ļز�ǿ����Ϣ���ݴ���������ֲ���������.ͬʱ������ǽ����ڿռ����뽨���ݶ��������ڣ���������õ�������(��ǿ����Ϣ�����������Ϳռ�ֲ�������)��ȡ���������ʱ��Ҳ��Ҫ�����������ڵ��ڽ��㣬����������Щ��(ǽ���)�ķ������ֲ�����������.���о�����Kd����ʵ�����ڽ�������[10].
���Ƚ���ֲ����ļ��.ֲ����ز�ǿ��Eint�������£�
| ${{E}_{\operatorname{int}}}=\sum\limits_{i=1}^{N}{{{p}_{italic>1}}/\sum\limits_{i=1}^{N}{{{p}_{i}}}},$ | (1) |
��ν���ǽ���ļ��.ȷ��������ij�㷨�������������ת��Ϊ��ȡ�õ����ڵ���ƽ��ķ������⣬��˿���ͨ���Ըõ����������е���ɵ�Э��������������ֵ�ֽ�������õ�ķ���������ʵ�����Ƕ�һ�����Ƽ��Ͻ������ɷַ���[11].
���ڵ�p�������������е���ɵ�Э�������C����Ϊ
| $C=\frac{1}{k}\sumolimits_{j=1}^{k}{\left( {{p}_{j}}-\bar{p} \right){{\left( {{p}_{j}}-\bar{p} \right)}^{\text{T}}}},$ | (2) |
�����ݶ����Ƶķ�������������Z��(��������(0,0,1))��ֱ����ǽ����Ƶķ�������ͨ����ֱ��Z��.��ˣ�ͨ�������ķ�������Z��ļнǼ��ɼ�����Ե�ǽ���.���⿼�ǵ�ֲ�����Ʒֲ�������ԣ���Щֲ�����Ƶķ�����Ҳ�п��ܽ��ƴ�ֱ��Z�ᣬ������÷���������Ҳ����̽����ֵ�ֲ������������ĵ���.
1.3 ��ʼ�����������ȡ������ֲ�����ǽ����ķǵ������������ͨ�ɷַ���������ŷʽ����.����Ϊ�������ݼ�P����Kd��������Ȼ������һ������ձ�M��һ������ѯ�ĵ����Q����P��ÿ����piִ�����²��裺
1) ���ӵ�pi������Q��
2) �������pi����С��r���ڽ��㼯Pik��Ȼ����Pik��ÿ���ڽ���pik�Ƿ��Ѿ�����ѯ�����Ϊ�������ӵ�Q��
3) ��Q�����е㶼�ѱ���ѯ����Q���ӵ������M��Ȼ������QΪ��.
���P�����е�pi���ѱ�ִ�У�����ֹ�˹���.ͨ���������̵õ��ĸ�����ͨ������dz�ʼ���������.
1.4 DTM���ɶ��˲��õ��ĵ������пռ��ֵ�����ɹ��������DTM.���IJ��÷������Ȩ(IDW)��[12]������һ�ֳ��ö��Ŀռ��ֵ�����������˼���ǣ��������������������Խ���ĵ�Ը�������Ӱ��Խ��������ɢ�㸳���Ȩ�ؾ�Խ��.�ٶ�����ijһ��ֵ�������n����ɢ�������Ӱ��,�ò�ֵ�㴦��ֵ�ɱ�ʾΪ
| ${{z}_{p}}=\sumolimits_{i=1}^{n}{\left( d_{i}^{-1}\times {{z}_{i}} \right)}/\sumolimits_{i=1}^{n}{d_{i}^{-1}},$ | (3) |
1.5 �ݶ�������ȡ���ȸ��ݽ��������С����������ֵ�Գ�ʼ�������ƽ����Զ�ɸѡ������ѡ��һЩ������Ͻ����������ı�ѡĿ��Qi��ͬʱС����С����ͳ�����������Ŀ��㶼��Ϊ��ֲ����.
Ȼ�����ñ�ѡĿ��Qi������������DTM�п����ҵ������Ӧ�ĵ���̣߳��ٸ��ݸ߶���Ϣ��������Qi���Ӧ����G֮��ĸ߲�hi.��hi������С�߲�����߲�֮�䣬����Ϊ��ѡĿ��Qi�ǽ�����.�����ø߲�Ա�ѡĿ������һ����ȡʱ������DTMȷ������̵߳ķ���������ͨ�������������Ƹ��������ȷ������̵߳ķ����������ܵõ��ӽ�����ʵֵ�ĵ���̣߳�������һ���̶��ϱ��������ڵ�������ϴ������������ƵĴ�����ȡ��������������Ч��.
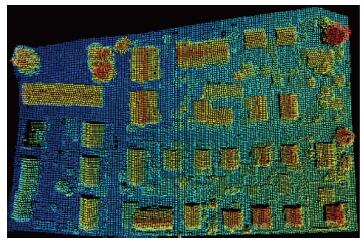
2 ������ʵ������ѡ��ISPRS����ίԱ���ṩ�ĵ¹�Vaihingenʵ������еľ���סլ��Area 3.�ò����ĵ���������Leica��˾��ALS50ϵͳ��ȡ�����������ܶ�Ϊ4 pts/m2��ƽ������Ϊ0.5 m.ͼ 2Ϊ�����������õ�ԭʼ���ư��߳���ʾ��Ч��.
Fig. 2
 | Download: JPG larger image |
| ͼ 2 ������ԭʼ����Fig. 2 Raw data of the test area | |
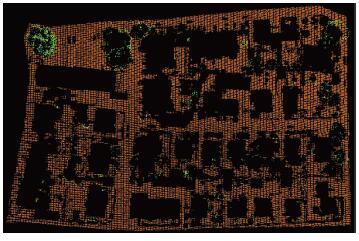
���ȶ�ԭʼ��������̬ѧ�˲��㷨�õ��ǵ�����ƣ�Ȼ����м��ֲ������(��ɫ)�ͽ�����ǽ�����(��ɫ)�������ͼ 3��ͼ 4��ʾ.���н�������Ϣ�������������Ƚ����Ե�ǽ��㶼����������Ҳ��������ֲ�����ƣ���Ҫԭ��������ֲ�����Ʒֲ��������ԣ����²���ֲ�����Ʒ�����Ҳ��ֱ��Z��.���о���������ز�ǿ����ֵΪ0.3�����Ʒ�������Z��н���ֵΪ60�㣬��ʱ�����ݶ���Ϣ���������.
Fig. 3
 | Download: JPG larger image |
| ͼ 3 ֲ������(��ɫ��)�͵����(��ɫ��)Fig. 3 Vegetation points (yellow points) and ground points (brown points) | |
Fig. 4
 | Download: JPG larger image |
| ͼ 4 ǽ�����(��ɫ��)Fig. 4 Wall points (yellow points) | |
����ֲ�����ǽ����ƺԷǵ�����ƽ�����ͨ�ɷַ��������ݾ��������н����ݶ�������ȡ.���������˲��õ��ĵ�����ƣ�����IDW�������ֵ����DTM��Ϊ����������ȷ�ԣ����IJ��õķֱ��ʺ��˲�ʱ�������ౣ��һ��.Ȼ����������߲���ֵ���о���ȡ����ز�������Ϊ�����������Ϊ1.0 m����С�������Ϊ100�����������С���������ֱ�Ϊ50 m2��600 m2���߲���ֵ���ʵ�ʵ����������Ϊ2.0 m.�����ȡ�Ľ����ݶ�������ͼ 5��ʾ.
Fig. 5
 | Download: JPG larger image |
| ͼ 5 ���������Fig. 5 Building roof points by the proposed method | |
3 ����������ͼ 3��ͼ 4���������ûز���Ϣֻ�ܼ��ز��������Եĵ㣬�����ڳ���ï�ܵ�ֲ�������ز�����������.���ڽ����ݶ����ƣ���߽���Ϣ������������˵�����ûز�ǿ����Ϣ���ֲ�������ڽ������ݶ����Ƶ�������.ͬʱ��ͼ 4Ҳ�������õ��Ʒ���������ǽ������кܶ�ʵ��Ϊֲ���㣬�ر��ǹڲ㴹ֱ�ֲ��Ƚ����Ե�ֲ��.��ͼ 5Ҳ���Կ���������סլ�������彨���������������ȡ��������������������߲����ֵ�����ã����ɱ������������С���߾������߲�С����ֵ�Ľ�����㱻©�������.������������56�����������48������ȷ��ȡ����©�Ľ�����Ϊ8������ȷ��ȡ��Ϊ85.7%������ 1.Niemeyer J��[13]�Ը�ʵ�����Ľ�����Ҳ��������ȡ������ȷ��ȡ��Ϊ81.7%.����ȡ������ԣ���ȡ���ĵ��ƾ�Ϊ��������ƣ�û�д���Ľ�������ƣ�˵����������ķ����ܹ���Ч��ʵ�ֽ�������ֲ���ķ���.�����������Ҫ�������С�Ľ����ﱻ©�������£������ֵ����©��Ľ���������࣬��С��ᵼ�´����ʱ��.ͬʱ�����������С�Ľ�������ǵͰ��Ľ�����ھ���ȡ������һЩ��������ֵ�Ľ��������Ҳ�ᱻ©��.
Table 1
| �� 1 �������ݶ���ȡ���ȷ���Table 1 Building roof extraction precision analysis |
Ӱ�챾�Ľ���������ȡ���ȵ����ػ����˲�������ռ��ȷ��.���˲������У���������ֵ���ò������ᵼ�µ������ǵ����Ĺ��ȷ���.��ȷ������㼯ʱ����������Ͱ뾶���ù�����С�����ή��ֲ�����ǽ������ȷ�ԣ���Щ���ػ����ٻ�Ӱ�������������ȡ�������Ժ;���.��������ʵ����������֪ʶ��������߽�������Ƶ���ȡ����.
4 �����ﱾ�Ŀ��ǵ���������ռ�Ե��������������Ҫ���Լ�������ǽ����ƶԺ���������ȡ��Ӱ�죬���LiDAR�������ݵ��ص㣬������һ�ֲ��ʽ�Ľ����ݶ������Զ���ȡ����.����������ڽ���ֲ�����ǽ�������ֽ����ݶ����ƶ��ܱ�ȷ����ȡ�����ܹ���Ч����ֲ�������������һ�ִӻ���LiDAR���������п�����ȡ��������Ƶ���Ч����.
�����
| [1] | ����, ʷ����, �Ż�. һ�ֻ���LiDAR���ݵĽ������Զ���ȡ����[J].���ͨ��, 2014(4):82�C85. |
| [2] | Rottensteiner F. A new method for building extraction in urban areas from high-resolution LiDAR data[J].International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences, 2002, 34(3/A):295�C301. |
| [3] | Sun S, Member S, Salvaggio C. Aerial 3D building detection and modeling from airborne LiDAR point clouds[J].IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing, 2013, 6(3):1440�C1449. |
| [4] | Awrangjeb M, Fraser C. Automatic segmentation of raw LiDAR data for extraction of building roofs[J].Remote Sensing, 2014, 6(5):3716�C3751.DOI:10.3390/rs6053716 |
| [5] | Richter R, D?llner M B J. Object class segmentation of massive 3D point clouds of urban areas using point cloud topology[J].International Journal of Remote Sensing, 2013, 34(23):8408�C8424.DOI:10.1080/01431161.2013.838710 |
| [6] | Zhang W, Wang H, Chen Y, et al. 3D building roof modeling by optimizing primitive's parameters using constraints from LiDAR data and aerial imagery[J].Remote Sensing, 2014, 6(9):8107�C8133.DOI:10.3390/rs6098107 |
| [7] | Zhang J, Lin X, Ning X. SVM-based classification of segmented airborne LiDAR point clouds in urban areas[J].Remote Sensing, 2013, 5(8):3749�C3775.DOI:10.3390/rs5083749 |
| [8] | Zhang K Q, Cjen S, Whiteman D, et al. A progressive morphological filter for removing nonground measurements from airborne LiDAR data[J].IEEE Transactions on Geoscience & Remote Sensing, 2003, 41(4):872�C882. |
| [9] | ������, ���ڱ�, ����, ��. ���ڸĽ�����ѧ��̬ѧ�㷨��LiDAR���������˲�[J].���ѧ��, 2010, 39(4):390�C396. |
| [10] | Arya S, Mount D M, Netanyhu N S, et al. An optimal algorithm for approximate nearest neighbors searching fixed dimensions[J].Journal of the ACM, 1998, 45(6):891�C923.DOI:10.1145/293347.293348 |
| [11] | ������, ���ܹ�, ����, ��. �������ɷַ����ĵ���ƽ����ϼ����о�[J].��湤��, 2014, 23(4):20�C23. |
| [12] | ��С��, ��Ө, ����÷. �������Ȩ����ֵ�㷨�ĸĽ����Ƚ�[J].���̵�������ѧ��, 2013, 10(6):900�C904. |
| [13] | Niemeyer J, Rottensteiner F, Soergel U.Classification of urban LiDAR data using conditional random field and random forests //Urban Remote Sensing Event (JURSE), 2013 Joint.Sao Paulo: IEEE, 2013:139-142. |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}