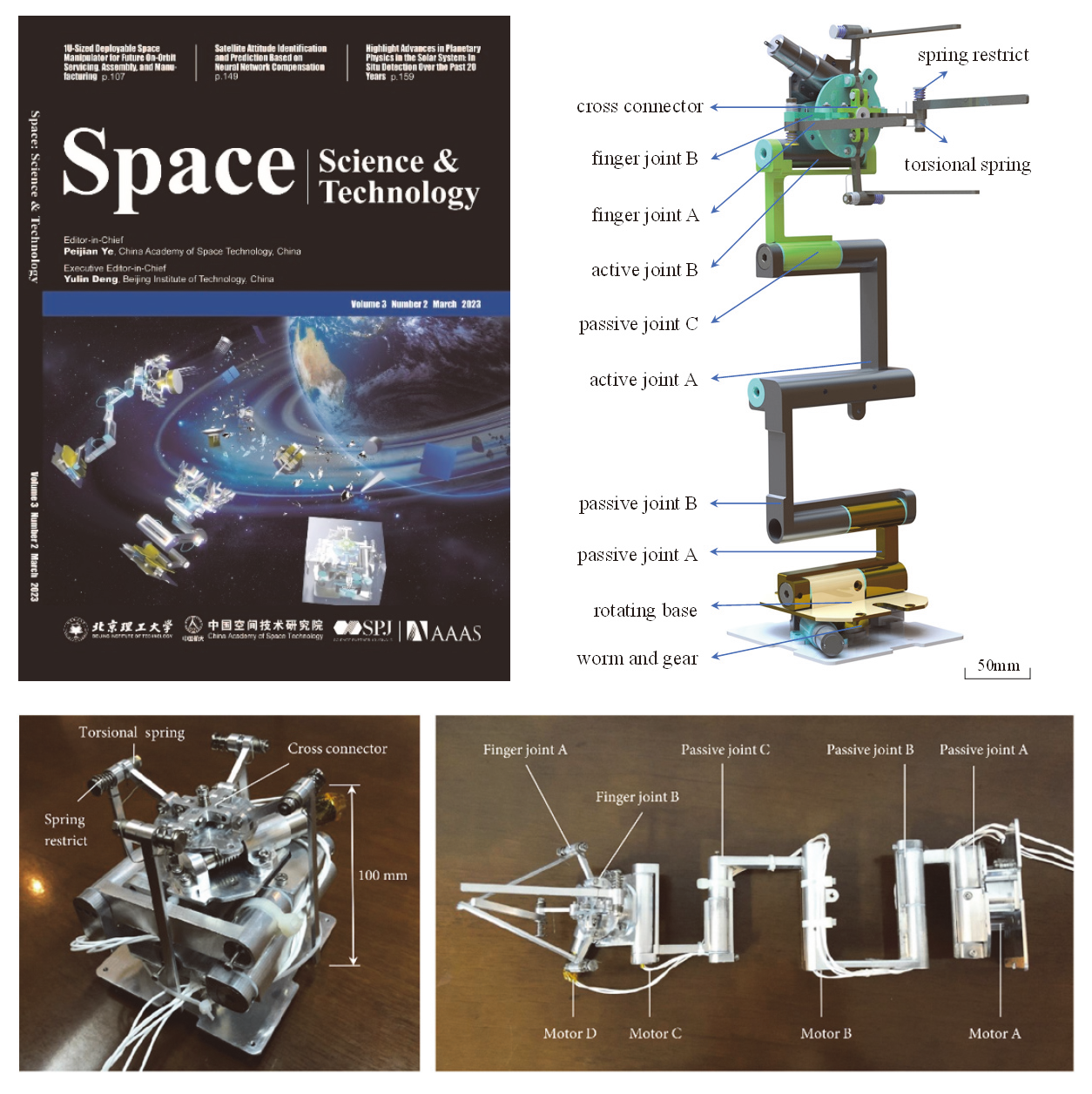
Space期刊封面与Cubot机械臂
近日,中国科学院沈阳自动化研究所在空间机械臂领域研究取得了新进展。为应对碎片清除、在轨组装和制造等复杂空间任务,科研团队创新性地研制出一种1U尺寸(10cm*10cm*10cm)的可展开空间机器臂Cubot。相关论文以封面形式发表于Space:Science&Technology期刊(DOI:10.34133/2022/9894604)。
科研团队已完成Cubot原理样机的研制,并进行了展开与抓取实验,验证了Cubot的可行性。Cubot由主动关节、被动关节、臂杆和末端执行器等组成,折叠时可收拢于1U的空间尺寸内,展开后为一个带末端执行器的多自由度机械臂,折展比达1比7。Cubot具有两种工作模式:A模式主要用于航天器的在轨维护,而B模式则面向空间碎片的主动清除。
在构型设计方面,Cubot可根据具体在轨任务,灵活调节或定制杆长、被动关节数、末端执行器尺寸等设计参数。在展开过程中,Cubot是一个7自由度机械臂;完全展开后,被动关节自锁,Cubot变成了一个3自由度机械臂外加一个单自由度的末端机械手爪。在工作区域设置方面,Cubot在展开过程和展开后拥有不同的工作区域。
Cubot 实现了空间机械臂的模块化、微型化设计,在轨展开后可以完成对小型空间碎片的抓取,辅助空间站舱外结构维护等作业任务。
该研究得到了国家重点研发计划等项目的支持。(空间自动化研究室)
附件下载:
