

东北大学 理学院,辽宁 沈阳 110819
收稿日期:2022-05-09
作者简介:周娟(1981-),女,辽宁沈阳人,东北大学副教授。
摘要:研究了具有不确定转移速率的广义马尔可夫跳变系统的耗散模糊控制问题.首先,建立了一个新的李雅普诺夫函数,进而得到了能够保证系统随机可容许并且具有给定耗散性能指标α的有界实引理.利用时滞分割方法和新的不等式去处理函数,从而在一定程度上减少了结论的保守性.其次,基于这些因素,得到了可以利用严格的线性矩阵不等式求解的期望控制器的显式表达式.在设计控制器的过程中,将不确定转移速率分为两种情况,进而得到了两种不同情况下的线性矩阵不等式.最后,一些数值算例反映出本文方法具有较小的保守性和有效性.
关键词:广义系统马尔可夫跳变系统耗散性模糊控制不确定转移速率
Dissipative Fuzzy Control for Singular Markovian Jump Systems with Generally Uncertain Transition Rates
ZHOU Juan, BAI Li-ping
School of Sciences, Northeastern University, Shenyang 110819, China
Corresponding author: BAI Li-ping, E-mail: 2000098@stu.neu.edu.cn.
Abstract: The problem of dissipative fuzzy control for singular Markovian jump systems is studied with generally uncertain transition rates. Firstly, a new Lyapunov-Krasovskii functional is established to develop the new bounded real lemma (BRL) which guarantee the system to be stochastically admissible with given dissipative performance α. Delay decomposition approach and new inequality to deal with functional are used, which can reduce the conservatism to a certain extent. Secondly, based on these ingredients, the explicit expression of the desired controller is obtained by solving a set of strict linear matrix inequalities (LMIs). In the design process of the controller, the generally uncertain transition rates are divided into two cases, and then obtain the LMIs in two different cases. Finally, some numerical examples reflect the less conservatism and effectiveness of the method in this article.
Key words: singular systemsMarkovian jump systemsdissipativityfuzzy controlgenerally uncertain transition rates
广义系统,也称为隐式系统、半状态系统,在生物系统和其他实际系统中都有着广泛的应用[1].在实际的工业生产过程中,系统的状态在一定程度上会发生突变,在这种情况下很难利用一般系统进行描述.因此,马尔可夫跳变系统近些年受到越来越多的关注.
作为一种特殊的混合系统,马尔可夫跳变系统常常应用于网络控制系统[2]、经济系统[3]等实际系统中.但是在解决实际问题时,获取转移速率可能需要花费大量的精力,那么不确定转移速率就有了研究的意义.文献[4]研究了具有不确定转移速率的广义马尔可夫跳变系统的耗散滤波器设计的相关问题.同时,时滞是在建模时不可忽略的因素.通常情况下,时滞是系统不稳定和性能下降的根源,尤其是考虑了时变时滞,会在分析稳定性、设计控制器、设计滤波器等方面增加一定的难度.文献[5]考虑具有时变时滞和参数不确定的广义马尔可夫跳变系统,通过构造一个更全面的李雅普诺夫泛函,建立了新的时滞相关条件,然后通过求解一组严格的线性矩阵不等式,得到所需的滤波器参数.
近年来,由于T-S模糊模型能够代表一类广泛的非线性系统,因此涌现了大量的研究.尤其对于广义T-S模糊模型,得到很多有价值的稳定性分析和控制综合结果.文献[6]研究了具有执行器饱和的马尔可夫跳变系统的非脆弱模糊耗散静态输出反馈控制问题,基于李雅普诺夫理论和凸组合引理,得到了闭环系统随机稳定和耗散的充分条件,最后设计出非脆弱模糊静态输出反馈控制器.文献[7]研究了具有时变时滞和随机增益变化的不确定T-S模糊系统的非脆弱动态输出反馈控制.考虑到T-S模糊模型和模糊控制器不具有相同的隶属度函数这一前提,通过调整扩展耗散概念中的自由权矩阵,进而在一个统一的框架内求解.
耗散性作为无源性和H∞的推广,具有重要意义.文献[8]研究了一类在T-S模糊规则下的连续时间非线性广义Markov跳变系统的严格异步耗散控制问题.文献[6]考虑了执行器饱和损坏和部分未知转移速率的影响,研究了广义T-S模糊马尔可夫跳变系统的静态输出反馈控制问题.得到了闭环系统不仅是有限时间有界的,而且是耗散的充分条件.控制器增益和吸引域的估计可以通过求解基于线性矩阵不等式的优化问题来解决.基于上述讨论,本文研究具有参数不确定、且转移速率不确定的广义马尔可夫跳变系统的模糊耗散控制问题.
本文主要通过时滞分割法建立了一个新的李雅普诺夫函数,不同于詹森不等式,用保守性较小的新的不等式去处理函数,得到了使系统随机可容许并且具有给定的耗散性能指标α的有界实引理,与文献[9]相比,本文方法能够得到更大的时滞上界.在此基础上,基于两种不同情况下不确定转移速率设计了模糊控制器,此时本文方法同样适用于转移速率完全已知的情况.还考虑了控制器的弹性,并以严格线性矩阵不等式的形式给出.最后,一些例子验证了本文方法较小的保守性和有效性.
1 问题描述符号表示:Rn为n维欧几里得空间;AT为矩阵A的转置;A-1为矩阵A的逆;rank(A)为矩阵A的秩;det A为矩阵A的行列式;A>0表示A是正定矩阵;diag{·}表示对角矩阵;||·||表示向量的欧几里得范数;E{·}表示向量或随机过程的数学期望;L2[0, ∞)表示n维平方可积的函数空间;I是适当维数的单位矩阵;λmax(A)表示矩阵的最大特征值;*代表对称矩阵中的对称项;定义

考虑一个由T-S模糊模型描述的不确定时滞广义Markovian跳变系统,模型的第i条规则为: Ri: If ε1(t) is Mi1 and ε2(t) is Mi2, …, and εp (t) is Mip, then
 | (1) |

 |

 |
其中:
Ai(rt), Adi(rt), Bi(rt), Bωi(rt), Ci(rt), Cdi(rt), Di(rt), Dωi(rt)是适当维数的已知矩阵;ΔAi(rt), ΔAdi(rt)ΔBi(rt), ΔBωi(rt), ΔCi(rt), ΔCdi(rt), ΔDi(rt), ΔDωi(rt)是表示范数有界参数不确定性的未知矩阵,假设其形式为
 | (2) |
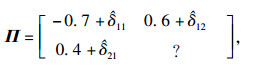
考虑不确定转移速率问题,系统(1)的转移速率矩阵可以表示为
 | (3) |

方便起见,对于



Uukp={q: 未知πpq估计值, q∈S}.
设Ukp={l1p, l2p, …, lpsp}, sp∈{1, 2, …, N}, 1≤lqp≤N·q=1, 2, …, sp是转移速率矩阵中第p行的第q个已知元素.另外,如果p∈Uukp,设其下界为πpd.
对系统(1)采用单点模糊化,乘机推理和中心加权平均解模糊方法, 则全局模糊模型可表示为
 | (4) |

设计模糊控制器:
 | (5) |

 | (6) |
根据式(4), 式(5), 得到闭环系统(7).
 | (7) |
 | (8) |
定义2[4]?? 系统(8)是随机稳定的,如果存在有限值

 |
定义4[4]?? 系统(1)是严格(Q, S, Rω)-耗散, 如果对T≥0和α>0, 在零初始条件下, 满足:
 |


引理1[6]?? 给定矩阵E, X>0, Y, 如果ETX+YΛT可逆, 则存在矩阵S>0, L, 使得

引理2[6]?? 对于矩阵N1, N2∈Rn×n, L∈Rn×p, 正定矩阵Z∈Rn×n时滞d(t),有
 |

 |

 |

引理4[6]?? 对于适当维数矩阵Q, H, E, 其中Q是对称的, Q+HFE+ETFTHT < 0成立对于FTF≤I, 当且仅当Q+εHHT+ε-1ETE < 0成立.
2 主要结论定理1 ??对于给定α>0, d, 系统(7)随机可容许并且严格(Q, S, Rω)-耗散, 如果存在对称矩阵Pp>0, P0>0, Q1>0, Q2>0, Q3>0, Q4>0和Sp使得对任意的p∈S, i∈R,
 | (9) |
 | (10) |
 |

 |
方便起见, 令
因为rankE=r < n,则一定存在非奇异矩阵G和H使得
 |



因此对于每个p∈S,矩阵对(E, Apij)是正则和无脉冲的.再分别用[I I I I 0]和[I I I I 0]T去乘式(10)的左右两侧,可得到
 |
接下来考虑随机稳定性.选择Lyapunov-Krasovakii泛函:
 |
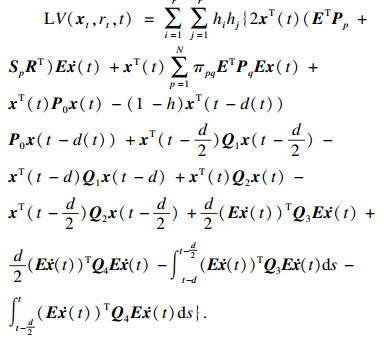 |

利用引理2, 有如下不等式成立:
 |
根据Schur补引理, 可以得到
 |




 |
 |
 |

因此,根据V(xt, rt, t)}和x(t)的定义可知总存在一个标量ρ使得
 |
 |
基于定理1设计控制器.
定理2 ??对于给定的α>0, d,存在形如式(5)的状态反馈控制器使得系统(6)随机可容许并且严格耗散的,如果存在


 | (11) |
 | (12) |
 |
 |
 |

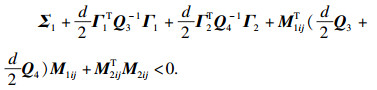
证明??根据定理1, 可以得到

其中:
 |
 |
 |
 |
 | (13) |








 |

 |

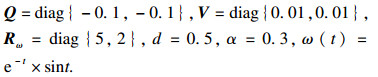
3 数值仿真例1 ??考虑一个文献[11]中的T-S马尔可夫时滞系统,其中E=I, S={1, 2}, T={1}和下列参数:
 |
表 1(Table 1)
| 表 1 对于不同π11的时滞上界 Table 1 The upper bound of time-delay for different π11 |
例2 ??考虑如下不确定广义模糊马尔可夫跳变系统,模糊规则:IF εp(t) is Mip THEN
 |
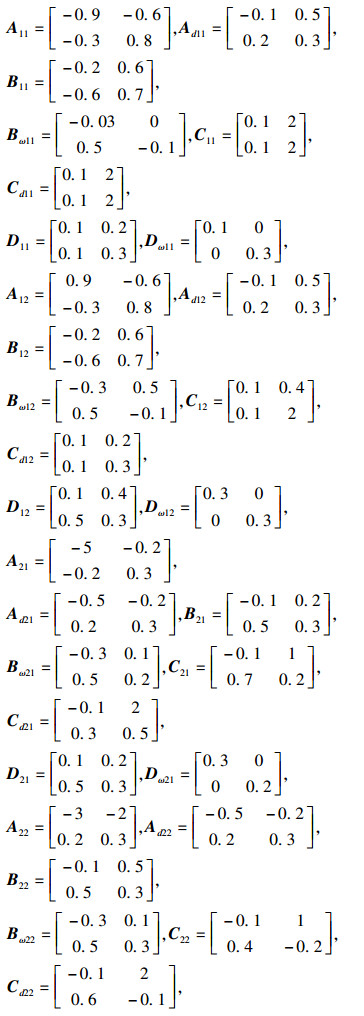 |
 |
 |


 |
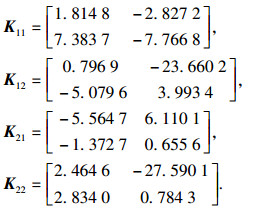 |
图 1(Fig. 1)
 | 图 1 马尔可夫跳变模式Fig.1 Markovian jump modes |
图 2(Fig. 2)
 | 图 2 开环系统状态响应Fig.2 State response of open-loop system |
图 3(Fig. 3)
 | 图 3 闭环系统状态响应Fig.3 State response of close-loop system |
4 结语本文提出了新的具有不确定转移速率的广义不确定马尔可夫跳变系统的模糊耗散控制的充分条件.其中通过时滞分割方法以及新的积分不等式处理函数,在一定程度上减小了保守性.然后在此基础上,得到了两种不同的不确定转移速率情形下的满足给定指标α耗散控制器,同时考虑了控制器的不确定性,且以严格的线性矩阵不等式的形式给出.数值仿真验证了本文的结果具有较小的保守性和有效性.未来,作者将尝试广义模糊系统的非脆弱输出反馈、记忆反馈控制等方面的研究.
参考文献
| [1] | Shen A Y, Li L, Li C Y. H∞ filtering for discrete time singular Markovian jump systems with generally uncertain transition rates[J]. Circuits, Systems, and Signal Processing, 2021, 40(7): 3204-3226. DOI:10.1007/s00034-020-01626-0 |
| [2] | Cao Y, Samidurai R, Sriraman R. Stability and dissipativity analysis for neutral type stochastic Markovian jump static neural networks with time delays[J]. Journal of Artificial Intelligence and Soft Computing Research, 2019, 9(3): 189-204. DOI:10.2478/jaiscr-2019-0003 |
| [3] | Song Y, Zhang Y, Yang S, et al. Investigation on stability and controller design for singular bio-economic systems with stochastic fluctuations[J]. Mathematical Biosciences and Engineering, 2021, 18(3): 2991-3005. DOI:10.3934/mbe.2021150 |
| [4] | Fu L, Ma Y C. Dissipative filtering for singular Markov jump systems with generally uncertain transition rates via newintegral inequality approach[J]. Journal of the Franklin Institute, 2018, 355(15): 7354-7383. DOI:10.1016/j.jfranklin.2018.07.023 |
| [5] | Zhuang G M, Xu S Y, Zhang B Y, et al. Robust H∞deconvolution filtering for uncertain singular Markovian jump systems with time-varying delays[J]. International Journal of Robust and Nonlinear Control, 2016, 26(12): 2564-2585. DOI:10.1002/rnc.3461 |
| [6] | 管巍. 饱和受限T-S模糊Makov跳变系统的稳定性分析与控制器设计[D]. 秦皇岛: 燕山大学, 2018. (Guan Wei. Analysis and controller design for T-S fuzzy Markovian jump systems with saturation constraints[D]. Qinhuangdao: Yanshan University, 2018. ) |
| [7] | Yu H, Ma Y C, Liu J W. Extended dissipative analysis for uncertain T-S fuzzy system with time-varying delay and randomly occurring gain variations[J]. Journal of the Franklin Institute, 2019, 356: 8542-8568. DOI:10.1016/j.jfranklin.2019.08.025 |
| [8] | 杨冬梅, 李达. 非线性广义Markov跳变系统的异步耗散控制[J]. 东北大学学报(自然科学版), 2021, 42(9): 1226-1230. (Yang Dong-mei, Li Da. Asynchronous dissipative control for nonlinear generalized Markov jump systems[J]. Journal of Northeastern University (Natural Science, 2021, 42(9): 1226-1230.) |
| [9] | Ma Y C, Chen M H. Non-fragile H∞ state feedback control for singular Markovian jump fuzzy systems with interval time-delay[J]. International Journal of Machine Learning and Cybernetics, 2017, 8: 1223-1233. DOI:10.1007/s13042-016-0495-1 |
| [10] | Park I S, Park C, Park P G. Output-feedback stabilization for descriptor Markovian jump systems with generally uncertain transition rates[C]//21st IFAC World Congress on Automatic Control-Meeting Societal Challenges. Berlin, 2020: 2045-2050. |
| [11] | 李丽. 广义Markovian跳变系统的控制问题研究[D]. 沈阳: 东北大学, 2015. (Li Li. Study of control problems for singular Markovian jump systems[D]. Shenyang: Northeastern University, 2015. ) |
| [12] | Wu Z G, Su H Y, Chu J. Delay-dependent filtering for singular Markovian jump time-delay systems[J]. Signal Processing, 2010, 90: 1815-1824. DOI:10.1016/j.sigpro.2009.11.029 |
