
 , ����1
, ����1 1. ̫ԭ������ѧ ��е�����ع���ѧԺ��ɽ�� ̫ԭ 030024;
2. ���ִ�ѧ ������������ƹ��� �ص�ʵ���ң����� ���� 130025;
3. �廪��ѧ ����������ѧԺ������ 100084
�ո����ڣ�2022-05-01
������Ŀ�������ص��з��ƻ���Ŀ(2020YFB1314001)��������������ƹ����ص�ʵ���ҿ��Ż���������Ŀ(20210218)��ɽ��ʡ�����о��ƻ�(����̽����)��Ŀ(20210302124119)��ɽ��ʡ�ߵ�ѧУ�Ƽ����¼ƻ���Ŀ(2021L085)��
����飺����(1990-)���У�ɽ��˷���ˣ�̫ԭ������ѧ��ʦ��
ժҪ��ȷ����Ч�ij���״̬��������������ʵ�־����Ƶ�ǰ�ᣬ���������Ҫ��չ�ֿ�����״̬�����㷨�о�.Ϊ�ˣ����һ�ַּ���������չ�������˲�(graded series extended Kalman filter��GS-EKF)����״̬�������Ʒ�����ּ�ڱ�֤���ƾ��ȵ�ͬʱ�������㷨�ļ���Ч�ʺ�³����.���ȣ����ڷּ�����˼�룬��������չ�������˲����ƵĽ������Ϊ�μ�״̬���ƵĿ�������������źţ�ʵ�ַּ�����״̬���ƣ�Ȼ����3���ɶȷ����Զ���ѧ����״̬��������ģ�ͣ��Է�����ת�Ǽ���������ٶ�Ϊ��������۲�����������Ϸ�����֤ƽ̨���Աȷ���4�ֲ�ͬ�㷨�ľ��ȡ�³�����Լ�Ч��.���������������㷨�ھ��Ⱥ�³���Է���ɴﵽ�����˲���Ч������Ч�ʱ������˲�������41.2%.
�ؼ��ʣ���������״̬���Ʒּ�������չ������³����
Vehicle State Parameter Estimation Based on Graded Series Extended Kalman Filter Method
CHEN Long1,2, LIU Qiao-bin3
, TAO Lei1 1. College of Mechanical and Vehicle Engineering, Taiyuan University of Technology, Taiyuan 030024, China;
2. State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China;
3. School of Vehicle and Mobility, Tsinghua University, Beijing 100084, China
Corresponding author: LIU Qiao-bin, E-mail: liuqiaobin@tsinghua.edu.cn.
Abstract: Accurate and efficient vehicle state estimation is the prerequisite for intelligent vehicles to achieve precise control, thus there is an urgent need to carry out research on fast and accurate state estimation algorithms. To this end, a graded series extended Kalman filter (GS-EKF) method of vehicle state parameter estimation is proposed, which aims to improve the computational efficiency and robustness of the algorithm while ensuring the estimation accuracy. Firstly, based on the graded series idea, the result of the primary extended Kalman filter estimation is used as the measurable control input signal of the secondary state estimation to realize the hierarchical cascading state estimation. Then, a 3-degree-of-freedom nonlinear dynamic vehicle state parameter estimation is established which takes the steering wheel angle and longitudinal/lateral acceleration as input variables and observation variables. Finally, a joint simulation verification platform is built to compare and analyze the accuracy, robustness and efficiency of four different algorithms. The results show that the proposed algorithm can achieve the effect of particle filter in terms of accuracy and robustness, and the efficiency is 41.2% higher than that of particle filter.
Key words: intelligent vehiclestate estimationgraded seriesextended Kalmanrobustness
�������ܻ��������ʻ��ȫ�ԡ����ٽ�ͨ�¹ʡ�������ͨЧ���Լ��ٽ����ܼ��ŵȷ��涼���кܴ����ƣ��ѳ�Ϊȫ��������ҵ��չ���ȵ㷽��[1-2].���������˶���ʻ���̿ɷ�Ϊ��������֪�����߹滮���˶�����[3]�����л�����֪�����ܳ������߹滮���˶����ƵĻ������ڣ���Ҫ����������Χ������֪�ͳ�������״̬��֪.��ˣ���������״̬��֪��ȷ��ֱ��Ӱ�쳵�����ܾ��߹滮��ȷ���Լ��˶������ȶ��ԣ���չ��������״̬������֪�������������ܿ��������ȶ��Ծ�����Ҫ������[4-6].Ȼ�������ڴ��в��������ͳɱ���һЩ�����ؼ�״̬������ͨ�����д�����ֱ�Ӳ�����ȡ���߲����ɱ�̫��[7-8].Ϊ�˷������⣬���õͳɱ�������������ȡ��Ϣ�����ó���ģ�ͽ��״̬�����㷨��ʵ�ֶԳ�����ʻ״̬�Ĺ��ƣ��ѳ�Ϊ������ʻ״̬������ȡ����Ҫ�ֶΣ�Ҳ�ǵ�ǰ���о��ȵ�.
������ʻ״̬�������Ƶ����ӣ������ǹ����㷨�����.��Գ�����ʻ״̬���������㷨���о���������****Ŀǰ��Ҫ�����ڿ�����(Kalman filter, KF)����չ�������˲�(extended Kalman filter, EKF)[9]���ݻ��������˲�[10]�����������˲�(unscented Kalman filter, UKF)[11]�������˲�(particle filter, PF)[12]���㷨���о�.����[9]����EKF״̬�����㷨��ͨ���ɼ�������ת�ǡ�������ٶȡ�������ٶȵ���Ϣ��ʵ�ֳ�����ʻ״̬��С������ƣ����ǹ��ƾ����Լ�����³���Խϲ�.����[11, 13]����UKF�㷨�Գ�����ʻ״̬�������й��ƣ�������ʵ���������������������ڴ�ͳEKF�㷨.����[14]�������PF�㷨���г���״̬���ƣ�������ʵ�������������÷����������õĹ��ƾ��ȣ�����PF�㷨���ڼ������ϴ�IJ���.����[15-17]�����������EKF�㷨�IJ��㣬������ָĽ���EKF״̬�����㷨.����[18]���״̬���ƹ�����������������ͳ�����Բ�ȷ�������⣬�����Ŵ��Ż��㷨��UKF�㷨�����Ż����Ӷ�����״̬��������.����[19]����һ�ָĽ��������˲��㷨������ζ�����˲��㷨������챵���綯��������״̬���ƣ���������ڸ߶ȷ�����״̬�£���ζ�����˲��㷨��������UKF��EKF�㷨��������Ȼ���ڼ������������.
�����������о������ϣ�ּ�ڲ�Ӱ��״̬���ƾ��ȵ�ǰ���£����÷ּ��������Ƶ�˼�룬�����һ�ַּ�������չ������(graded series extended Kalman filter, GS-EKF)״̬�����㷨��ʹ���ܹ����EKF�㷨�������ٺ�UKF��PF�㷨���ȸߡ�³���Ժõ��ŵ�.������3���ɶȳ��������Զ���ѧģ�ͺͷּ�������չ������״̬�����㷨������Matlab/Simulink��Carsim��˳�����ʻ״̬�����㷨���Ϸ���������֤ƽ̨���������������㷨��EKF, UKF��PF״̬�����㷨�����˶Աȣ�����֤�����㷨����Խ��.
1 ��������ѧģ�ͳ�������ѧ��ģ��������ʻ״̬���ƵĻ���������ģ���ۺϿ�����ʵ�ʳ��������ٵı仯�Ժ�ڡ���ƫ����ķ����Զ���ѧ���ԣ��Լ�����ת��ʱ��ڡ���ƫҲ���������˶�����ķ��������ԣ��������������������Լ����3���������ɶȵij��������Զ���ѧģ�ͣ���ͼ 1��ʾ[12].
ͼ 1(Fig. 1)
 | ͼ 1 ��������ѧģ��Fig.1 Vehicle dynamics model |
���ݳ�������ѧģ�ͽ����Ķ���ѧ����Ϊ
 | (1) |
 | (2) |
 | (3) |
 | (4) |
���ݳ���ģ�ͣ�����״̬����Ϊ
 | (5) |
 | (6) |
 | (7) |
 | (8) |
 |
���ڼ����ϵͳֻ�ܴ�����ɢ�źţ���Ҫ������ϵͳ���̽�����ɢ�������ò�ֱ任������������ѧ��ɢ������Ϊ
 | (9) |
2 GS-EKF״̬�����㷨2.1 ��չ�������˲��㷨��չ�������˲��㷨���ھ��俨�����˲��㷨�����ϣ�Ϊ���KF������������ϵͳ״̬���ƶ�����ĸĽ��㷨[9].EKF�Ļ���˼���ǽ�������ϵͳ����ѧ�����ڲο��㸽������Taylorչ�����������������ϵĸ߽������������ϵͳ�Ľ���������Ӷ��õ�ϵͳ�����Ի�����.����һ�����Ի����Ƶ�״̬���̺Ͳ������̽���״̬���ƣ����岽������.
1) ʱ�����.״̬һ��Ԥ�ⷽ��Ϊ
 | (10) |
 | (11) |


 |
�������˲��������Ϊ
 | (12) |
 |
 | (13) |
 | (14) |
2.2 GS-EKF״̬�����㷨EKF�㷨�����UKF��PF״̬�����㷨���ԣ����м�����С���ŵ㣬������״̬���ƾ��Ⱥ�³���Է�����ڲ���.�����ڶ�EKF״̬�����㷨�Ķ�̬���ܼ�³�����о��з��֣��ڳ�����ʻ״̬���ƹ����У���ͬ��״̬���������������г̶Ȳ�ͬ.��״̬������ڽ��ٶ��������IJ�ƫ�����ͳ���������vx�У���ڽ��ٶȵĹ��ƽ��ȷ�Ժ�³������ã�����������������ƾ���Ӱ���С�������IJ�ƫ�Ǻͳ���������vx�Ĺ����߱������ŵ�.���ڴˣ��������GS-EKF״̬�����㷨��������ʵ�ֲ�����ͼ 2��ʾ.
ͼ 2(Fig. 2)
 | ͼ 2 GS-EKF״̬�����㷨Fig.2 GS-EKF state estimation algorithm |
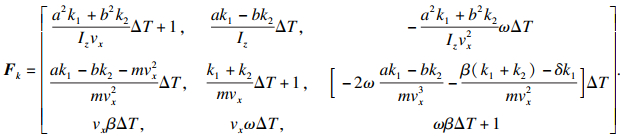
���ڷּ��������Ʋ��ԣ�����״̬������ڽ��ٶ������ƾ��ȸߡ�³���Ժõ��ŵ㣬������EKF���ƽ���е�����Ϊ�μ�EKF״̬���ƵĿ�������������źţ��Ӷ���ߴμ�EKF״̬���Ƶľ���.���Ҵμ�EKF����ģ����ԭ��3��״̬��������Ϊ2��״̬�����������˴μ�EKF״̬���Ƶļ�����.�μ�EKF��״̬������Ϊx��=[��vx]T����������Ϊu��=[�� �� ax]T������״̬���̺۲ⷽ����������Ϊ
 |
 |
 |
ͼ 3(Fig. 3)
 | ͼ 3 ״̬�����㷨�Աȷ���ṹԭ��ͼFig.3 Schematic diagram of state estimation algorithm comparison simulation structure |
�� 1(Table 1)
| �� 1 �������� Table 1 Parameters of vehicle |
ͼ 4(Fig. 4)
 | ͼ 4 ��Ϲ���������ת�Ǻͳ���Fig.4 Steering angle and speed under combined conditions |
Ϊ��������״̬�����㷨������ܲ��죬�ֱ����״̬���ƽ�������ʵ��ֵ�ķ�ֵ������(peak of relative error, PRE)��ƽ���������(mean absolute error, MAE)�;��������(root-mean-square error, RMSE)�������㷨�Ĺ�������С�����㹫ʽ�ֱ�Ϊ[15]
 | (15) |
 | (16) |
 | (17) |
3.2 ����������״̬�����㷨����ѡȡx0=[0, 0, 0]T�����Э��������ʼֵP0=eye(3)����������Э��������ʼֵQ=diag(0.1��0.1��0.1)����������Э��������ʼֵΪR=0.001��PF�㷨����������ȡ100.�����Ǵ���������Ӱ�죬��Ϲ�����4��״̬�����㷨��������ͼ 5��ʾ.
ͼ 5(Fig. 5)
 | ͼ 5 ��Ϲ���״̬���ƽ��Fig.5 State estimation results under combined conditions (a)����ڽ��ٶȣ�(b)�����IJ�ƫ�ǣ�(c)��������. |
��ͼ 5��֪�������Ǵ������������ŵ�����£�4��״̬�����㷨����������ʵֵһ���ԽϺã�������40~50 s���������ڣ���ʱ����Ϊ���ٳ��ڣ����ٽϸߣ�ͬʱ���ι���ת��������º�ڽ��ٶ��������IJ�ƫ�������ƽ����ֵ�������.��˵��ͼ 5a��ڽ��ٶ�û�л���GS-EKF��״̬�������ߣ�������Ϊ�ּ������г���EKF�Ժ�ڽ��ٶȵĹ��ƽ����ΪGS-EKF�����չ��ƽ�������GS-EKF�Ժ�ڽ��ٶȵĹ��ƽ���봫ͳEKF���һ��������û�е�����������.�����Ա�4��״̬�����㷨���������ͼ 6��ʾ.
ͼ 6(Fig. 6)
 | ͼ 6 ��Ϲ���״̬�������Fig.6 State estimation errors under combined conditions (a)����ڽ��ٶ���(b)�����IJ�ƫ����(c)�����������. |
��ͼ 6��֪���ڲ����Ǵ�����������ǰ���£�4��״̬�����㷨�Ĺ���������������dz��ӽ�ʵ��ֵ����ͼ 6b���IJ�ƫ�����Ĺ��ƽ����֪��GS-EKF�㷨�Ĺ��������С������ͼ 6c������vx�Ĺ��ƽ����֪��GS-EKF�㷨�Ĺ����������EKF�㷨�����Dz���UKF�㷨��PF�㷨.
��һ������״̬�����㷨�ļ���Ч�ʣ����÷����ʱ�������㷨�ļ���Ч��.���ķ�����ʹ�õļ����CPUΪAMD R7 5800H��ƵΪ3.2 GHz���ڴ�16 GB��ģ�ͷ���ʱ������Ϊ60 s�����沽��Ϊ0.001 s.����õ�4��״̬�����㷨�����ʱ��ͼ 7��ʾ.
ͼ 7(Fig. 7)
 | ͼ 7 ��Ϲ��������ʱFig.7 Simulation time of combined conditions |
��ͼ 7��֪GS-EKF�㷨��ȴ�ͳEKF��ʱ����11 s���������UKF��PF�㷨�������ʱ�ֱ�����42��113 s������Ч�ʷֱ�����18.7%��41.2%.���ڶԷ��澫�Ȳ�����СӰ��ǰ���£�GS-EKF�㷨��Ч������״̬�����㷨����Ч�ʣ������㷨�������������ڽ��ͳ�������оƬ������.
3.3 ״̬�����㷨³���Է���ʵ�ʹ���Ӧ���У��������ź��������ſ�����㷨�IJ��ȶ���������.������״̬�����㷨��³���Կ�չ�о�������Ҫ�Ĺ���ʵ������.���ĶԴ����������źŵ��Ӳ�ͬ����ȵĸ�˹���������ֱ��趨�����SNRΪ80��40 dB����ģ������źŴ����е��������ź�ǿ����״̬���������ź�������Ұֵ��ģ��ʵ�������п��ܴ��ڵ�Ұֵ�źŸ��ţ����տɻ�ñ���³���Է�����4��������� 2��ʾ.
�� 2(Table 2)
| �� 2 ���湤������ Table 2 Simulation condition types |
�����SNR���㹫ʽΪ
 | (18) |
ͼ 8(Fig. 8)
 | ͼ 8 �����40 dB+Ұֵ������Fig.8 Simulation results of SNR 40 dB+outlier (a)����ڽ��ٶȣ�(b)�����IJ�ƫ�ǣ�(c)��������. |
��ͼ 8��֪��������������Ϣ�����Ĵ��ڣ�4���㷨�Ĺ��ƾ��ȶ�����һ���̶��½������жԺ�ڽ��ٶ�������ȷ�Ե�Ӱ���С�������IJ�ƫ�����Ĺ�������ֽ�Ϊ���Ե��������Ų���������EKF�㷨��������Ӱ����Ϊ����.ͬʱ������ҰֵҲ�Թ��ƾ�����Ӱ�죬�������IJ�ƫ�Ǻ������ٵĹ��ƽ������Ұֵ����ʱ��EKF��UKF�㷨��ҰֵӰ����ƽ�������쳣����GS-EKF�㷨��PF�㷨��Ч������Ұֵ�Թ��ƽ���ĸ��ţ�˵���俹���ŵ�³����Ҫ����EKF��UKF�㷨.
��һ�����㲻ͬ������µĹ������������ 3��ʾ.
�� 3(Table 3)
| �� 3 ��ͬ����ȸ�����״̬�����㷨��� Table 3 State estimation algorithm errors under different SNR interference | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
���� 3��֪������ȵļ�С�Ժ�ڽ��ٶȵĹ��ƾ���Ӱ���С������4��״̬�����㷨��Ĺ����������һ��֤����״̬�ȶ��Ҳ����ܸ��ţ����������μ�EKF����������.�����IJ�ƫ������������vx�Ĺ������������ȵ�Ӱ���Ϊ����.
ͼ 9Ϊ��ͬ������µ�״̬�������Ա�ͼ.��ͼ 9��֪������ȼ�С�Ժ�ڽ��ٶ����Ĺ���Ӱ���С���������IJ�ƫ������������vx�Ĺ������Ӱ��ϴ�, �����Ƕ�EKF�㷨�����ΪUKF�㷨�������������GS-EKF��PF�㷨�Ŀ�����³��������.
ͼ 9(Fig. 9)
 | ͼ 9 ��ͬ������µ�״̬�������Fig.9 State estimation errors under different SNR (a)����ڽ��ٶȣ�(b)�����IJ�ƫ�ǣ�(c)�����������. |
��������ȵļ�С��4�ֹ����㷨�Ĺ�����������������.��ͬ������£�GS-EKF�㷨�����IJ�ƫ�����Ĺ��������С��UKF�㷨��������vx�Ĺ��������С.�����������GS-EKF�㷨��Ч�ؿ˷��˴�ͳEKF�㷨���ƾ��Ⱥ�³���Բ����ȱ�㣬ͬʱ�������������С���ŵ�.������ۺϿ���״̬���ƾ��ȡ�����Ч���Լ��������ź�����³���Ե������£�GS-EKF�㷨��������.
4 ����1) ͨ����EKF, UKF��PF�㷨�ķ���Աȣ�GS-EKF״̬���ƾ��ȺͿ���³������PF�㷨�൱�����ж����IJ�ƫ�ǵĹ��ƾ������������㷨���Ҽ���Ч�ʱ�UKF��PF�㷨�ֱ�����18.7%��41.2%.
2) ���������GS-EKF�㷨�ڼ̳д�ͳEKF�㷨�Ļ����ϣ���Ч�ؿ˷��˴�ͳEKF�㷨���ƾ��ȺͿ���³���Բ����ȱ��.
3) GS-EKF�㷨���EKF�㷨�������ٺ�PF�㷨���ȸߡ�³���Ժõ��ŵ㣬��˸��㷨���нϺõ�ʵ�ʹ���Ӧ��ǰ��.
�����
| [1] | Yang D G, Jiang K, Zhao D, et al. Intelligent and connected vehicles: current status and future perspectives[J]. Science China (Technological Sciences), 2018, 61(10): 1446-1471. DOI:10.1007/s11431-017-9338-1 |
| [2] | ���ҳ�, �Ż�, �Ծ�, ��. ��������ӦMPC�����˼�ʻ�����켣���ٿ���[J]. ������ѧѧ��(��Ȼ��ѧ��), 2020, 41(6): 835-840. (Liang Zhong-chao, Zhang Huan, Zhao Jing, et al. Trajectory tracking control of unmanned vehicles based on adaptive MPC[J]. Journal of Northeastern University(Natural Science), 2020, 41(6): 835-840.) |
| [3] | ��ǿ, �̺�, ����, ��. �����������˹������㷨Ӧ�ü��䰲ȫ����[J]. ���ӿƼ���ѧѧ��, 2020, 49(4): 490-498, 510. (Zhai Qiang, Cheng Hong, Huang Rui, et al. A survey: artificial intelligence and its security in intelligent vehicle[J]. Journal of University of Electronic Science and Technology of China, 2020, 49(4): 490-498, 510.) |
| [4] | Viehweger M, Vaseur C, van Aalst S, et al. Vehicle state and tyre force estimation: demonstrations and guidelines[J]. Vehicle System Dynamics, 2021, 59(5): 675-702. DOI:10.1080/00423114.2020.1714672 |
| [5] | ��־��, ֣��, ����ũ, ��. ����³������ӦSCKF����������Ŀ��״̬�����о�[J]. ��е����ѧ��, 2021, 57(20): 181-193. (Zhang Zhi-da, Zheng Ling, Li Yi-nong, et al. State estimation of distributed electric vehicle based on robust adaptive UKF[J]. Journal of Mechanical Engineering, 2020, 50: 1461-1473.) |
| [6] | ����, ����, ��Ӣ��, ��. ����״̬���Ƶ����˳�ǰ��ת�������ȶ�Э������[J]. ����������ѧѧ��, 2021, 41(10): 1050-1057. (Chen Te, Xu Xing, Cai Ying-feng, et al. Coordinated control of front-wheel steering angle and yaw stability for unmanned ground vehicle based on state estimation[J]. Transactions of Beijing Institute of Technology, 2021, 41(10): 1050-1057.) |
| [7] | Song R, Fang Y. Vehicle state estimation for INS/GPS aided by sensors fusion and SCKF-based algorithm[J]. Mechanical Systems and Signal Processing, 2021, 150: 107315. DOI:10.1016/j.ymssp.2020.107315 |
| [8] | Liao Y W, Borrelli F. An adaptive approach to real-time estimation of vehicle sideslip, road bank angles, and sensor bias[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7443-7454. DOI:10.1109/TVT.2019.2919129 |
| [9] | �ڳ���, ����, ����, ��. ������չ�������˲�����Ϣ�ںϼ����ڳ���״̬�����е�Ӧ��[J]. ��е����ѧ��, 2009, 45(10): 272-277. (Zong Chang-fu, Pan Zhao, Hu Dan, et al. Information fusion algorithm for vehicle state estimation based on extended Kalman filtering[J]. Journal of Mechanical Engineering, 2009, 45(10): 272-277.) |
| [10] | ����ѫ, �����, ��ͯ, ��. ���������綯�������IJ�ƫ������̥������������³���ںϹ���[J]. �й���е����, 2022, 33(22): 2673-2683. (Wang Fan-xun, Yin Guo-dong, Shen Tong, et al. Nonlinear robust fusion estimation of sideslip angle and tire lateral forces for four-wheel-drive vehicles[J]. China Mechanical Engineering, 2022, 33(22): 2673-2673.) |
| [11] | Antonov S, Fehn A, Kugi A. Unscented Kalman filter for vehicle state estimation[J]. Vehicle System Dynamics, 2011, 49(9): 1497-1520. |
| [12] | Wang F S, Lu M Y, Zhao Q J. Particle filtering algorithm[J]. Chinese Journal of Computers, 2016, 37(8): 1679-1694. |
| [13] | ����ͮ, �����, ���ɱ�, ��. �ֲ�ʽ�綯����״̬��������������˲�����[J]. ��е����ѧ��, 2020, 56(16): 204-213. (Song Yi-tong, Shu Hong-yu, Chen Xian-bao, et al. State and parameters estimation for distributed drive electric vehicle based on unscented Kalman filter[J]. Journal of Mechanical Engineering, 2020, 56(16): 204-213.) |
| [14] | �֗�, ����Ⱥ, ��˷��. ���������˲��㷨������״̬���Ƽ���[J]. ũҵ��еѧ��, 2011, 42(2): 23-27. (Lin Fen, Zhao You-qun, Xu Shuo-nan. Vehicle states estimation technology based on particle filter algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 23-27.) |
| [15] | �� ��, κ����, ������, ��. ���ڵ�����С���˷���ģ������Ӧ��չ�������˲����ϵij���״̬����[J]. �й���е����, 2017, 28(6): 750-755. (Wang Yan, Wei Min-xiang, Zhao Wan-zhong, et al. Vehicle state estimation based on combined RLS and FAEKF[J]. China Mechanical Engineering, 2017, 28(6): 750-755.) |
| [16] | Katriniok A, Abel D. Adaptive EKF-based vehicle state estimation with online assessment of local observability[J]. IEEE Transactions on Control Systems Technology A Publication of the IEEE Control Systems Society, 2016, 24(4): 1368-1381. |
| [17] | ��־��, ����֥, �Ʋ�ϼ, ��. ��������Ӧ��չ�������˲��ķֲ�ʽ�����綯����״̬����[J]. ��е����ѧ��, 2019, 55(6): 156-165. (Zhang Zhi-yong, Zhang Shu-zhi, Huang Cai-xia, et al. State estimation of distributed drive electric vehicle based on adaptive extended Kalman filter[J]. Journal of Mechanical Engineering, 2019, 55(6): 156-165.) |
| [18] | ������, ����, ����, ��. �������������˲����Ŵ��㷨���ϵij���״̬����[J]. ��������, 2019, 41(2): 198-205. (Zhou Wei-qi, Qi Xiang, Chen Long, et al. Vehicle state estimation based on the combination of unscented Kalman filtering and genetic algorithm[J]. Automotive Engineering, 2019, 41(2): 198-205.) |
| [19] | Chu W, Luo Y, Dai Y, et al. In-wheel motor electric vehicle state estimation by using unscented particle filter[J]. International Journal of Vehicle Design, 2015, 67(2): 115-136. |
