
 , ОәУсІ©1, АоЗпжВ1, УЪ¶ЎБҰ1,2
, ОәУсІ©1, АоЗпжВ1, УЪ¶ЎБҰ1,2 1. јӘБЦҙуС§ НЁРЕ№ӨіМС§ФәЈ¬јӘБЦ іӨҙә 130022;
2. АыОпЖЦФјәІДҰ¶ыҙуС§Ј¬АыОпЖЦ Уў№ъ L35UX
КХёеИХЖЪЈә2021-12-11
»щҪрПоДҝЈәјӘБЦКЎҝЖјјМьЧФИ»ҝЖС§»щҪрЧКЦъПоДҝ(20190201099JC); Жыіө·ВХжУлҝШЦЖ№ъјТЦШөгКөСйКТЧФУЙМҪЛчПоДҝ(ascl-zytsxm-202022)ЎЈ
ЧчХЯјтҪйЈәАоКЩМО(1975-)Ј¬ДРЈ¬јӘБЦіӨҙәИЛЈ¬јӘБЦҙуС§ёұҪМКЪЎЈ
ХӘТӘЈәХл¶ФІаПтРРК»іөБҫТЧ·ўЙъЧӘПтК§ОИЈ¬№№ҪЁБЛТ»ЦЦҝјВЗВЦМҘІаЖ«ёХ¶Иұд»ҜөДіөБҫОИ¶ЁРФҝШЦЖ·Ҫ·ЁЈ¬ТФұЬГвВЦМҘІаПтБҰұҘәНЈ¬МбёЯРРіө°ІИ«РФ.ІЙУГЗ°ЎўәуЦбВЦМҘІаЖ«ҪЗ·Ц¶ОДвәП·Ҫ·ЁҪЁБўВЦМҘІаЖ«ёХ¶ИДвәПДЈРНЈ¬Ҫ«ДвәП№эөДІаЖ«ёХ¶ИТэИлөҪіөБҫ¶ҜБҰС§ДЈРНЦРЈ¬ЧјИ·ГиКціөБҫөұЗ°өД¶ҜМ¬РФДЬ.ОӘБЛұЬГвВЦМҘІаПтБҰұҘәНТэЖрөДЧӘПтК§ОИЈ¬ұҫОДМбіцТ»ЦЦ»щУЪДЈРНФӨІвҝШЦЖ(model predictive control, MPC)Лг·ЁөДЗ°әуЦбФјКшөДВЦМҘІаЖ«ҪЗөДіөБҫОИ¶ЁРФҝШЦЖ·Ҫ·ЁЈ¬ТФУЕ»ҜіөБҫөДЧӘПтРФДЬ.·ВХжҪб№ыұнГчЈ¬іөБҫОИ¶ЁРФҝШЦЖ·Ҫ·ЁДЬ№»Ҫ«З°әуЦбөДВЦМҘІаЖ«ҪЗТЦЦЖФЪТ»¶Ё·¶О§ДЪЈ¬ёщҫЭІаЖ«ёХ¶ИөДұд»ҜЈ¬ұЬГвіөБҫІа»¬ПЦПуөД·ўЙъЈ¬МбёЯБЛіөБҫөДОИ¶ЁРФ.
№ШјьҙКЈәЦч¶Ҝ°ІИ«РФІаЖ«ёХ¶ИДвәПФјКшЗ°ЦбІаЖ«ҪЗЧоРЎ¶юіЛ·ЁДЈРНФӨІвҝШЦЖ
MPC Stability Control Method Considering the Variation of VehicleЎдs Cornering Stiffness
LI Shou-tao1
, WEI Yu-bo1, LI Qiu-yuan1, YU Ding-li1,2 1. College of Telecommunication Engineering, Jilin University, Changchun 130022, China;
2. Liverpool John Moores University, Liverpool, UK
Corresponding author: LI Shou-taoЈ¬E-mail: list@jlu.edu.cn.
Abstract: In view of the easy steering instability of vehicles running sideways, this paper considers the variation of tire cornering stiffness to avoid saturation of tire lateral force and improve driving safety and constructs a vehicle stability control method. The front and rear axle tire sideslip angle segmented fitting method is used to establish a tire cornering stiffness fitting model, and then the fitted cornering stiffness is introduced into the vehicle dynamics model to accurately describe the current dynamic performance of the vehicle. In order to avoid the steering instability caused by the saturation of the tire lateral force, this paper proposes a vehicle stability control method based on the model predictive control(MPC)algorithm that considers the constraints of the front and rear axle tire sideslip angles to optimize the vehicle's steering performance. Simulation results show that the proposed vehicle stability control method can suppress the tire sideslip angle of the front axles within a certain range, while taking into account the changes in the cornering stiffness, thereby avoiding the occurrence of vehicle sideslip and improving the stability performance of the vehicle.
Key words: active safetycornering stiffness fittingconstrained front axle cornering angleleast square methodmodel predictive control
іөБҫІЩЧЭОИ¶ЁРФҝШЦЖКЗТ»ЦЦМбёЯЖыіөРРК»Цч¶Ҝ°ІИ«РФөД№ШјьјјКхЈ¬ҝЙУРР§·АЦ№Іа·ӯЎўЛҰОІөИҪ»НЁКВ№КөД·ўЙъЈ¬ДҝЗ°өзЧУОИ¶ЁРФҝШЦЖ(electronic stability control, ESC)өҘФӘ¶аНЁ№эөчҪЪЦч¶Ҝәб°ЪБҰҫШТФҙпөҪОИ¶ЁРФҝШЦЖР§№ыЈ¬¶ФУЪНдөАөДРРіөОИ¶ЁРФИФОӘіөБҫОИ¶ЁРФҝШЦЖөДДСөгј°ИИөгОКМв[1].ФЪРРіө№эіМЦРЈ¬іөБҫөДРРК»ЧҙМ¬ҫЯУРЗҝ·ЗПЯРФЈ¬іөБҫөД¶ҜМ¬ІОКэ»бЛжВ·ГжЧҙҝцј°іөБҫөДРРК»ЧҙМ¬ұд»Ҝ[2].ЖдЦРЈ¬У°ПміөБҫҪб№№ІОКэІ»И·¶ЁРФөДТтЛШЦчТӘ·ЦОӘДЈРНІОКэОҙЦӘј°ОҙҪЁДЈ¶ҜМ¬[3-4].ЖдЦРВЦМҘөДҙ№ЦұФШәЙ»бЛжіөБҫЦКБҝј°РРК»№ӨҝцөДёДұд¶шұд»Ҝ[5-6]Ј¬ВЦМҘІаЖ«ёХ¶Иј«ТЧЛжіөБҫРРК»№Өҝцј°»·ҫі¶ш·ўЙъёДұдЈ¬ИфІ»ј°Кұ¶ФВЦМҘІаЖ«ёХ¶ИҪшРРФјКшәНҙҰАнЈ¬іөБҫј«ТЧ·ўЙъК§ОИөИІ»ОИ¶Ё№Өҝц.
іөБҫ·ўЙъІа»¬КЗФміЙЦШҙуҪ»НЁКВ№КөДЦчТӘФӯТтЦ®Т»Ј¬ҝјВЗөҪТтВЦМҘІа»¬¶шөјЦВөДіөБҫК§ОИ№ӨҝцЈ¬AligiaөИ[7]ЙијЖБЛТ»ЦЦ»щУЪ№ЫІвЖчөДЗЈТэБҰҝШЦЖПөНіЈ¬ТФПыіэІаПтБҰУлЧЭПтЗЈТэБҰЦ®јдөДЗЈТэР§УҰЈ¬ұЬГвіөБҫТтЗЈТэБҰЧчУГ¶шіцПЦҙт»¬әНІа·ӯ.HanөИ[8]¶ФіөБҫҪшРРәПАнҝШЦЖЈ¬СЎФсІаЖ«ёХ¶ИөДұд»ҜЗчКЖЧчОӘЦёұк¶ФіөБҫРРК»В·ГжҪшРР·ЦАа.УЙОДПЧҝЙЦӘЈ¬УЙУЪВЦМҘІаЖ«ёХ¶ИКЬ¶аЦЦТтЛШУ°Пм¶шҫЯУРІ»И·¶ЁРФЈ¬ЛщТФ»щУЪІаЖ«ёХ¶И¶ЁБҝДЈРНЛщЙијЖөДОИ¶ЁҝШЦЖЖчҝЙДЬОЮ·ЁВъЧгЖдјЭК»№эіМЦРөДОИ¶ЁРФТӘЗу.
Хл¶ФТФЙПОКМвЈ¬МбіцБЛТ»ЦЦ»щУЪВЦМҘІаЖ«ҪЗәНҙ№ЦұФШәЙЧӘТЖБҝөДІаЖ«ёХ¶ИДвәПДЈРНЈ¬К№өұЗ°ІаПтБҰФЪТ»¶ЁОуІо·¶О§ДЪёъЧЩХжКөЦөЈ¬ҙЛКұіөБҫДЈРНДЬёьәГГиКціөБҫөұЗ°өДФЛ¶ҜЧҙМ¬Ј¬ұЬГвТтВЦМҘІаЖ«ҪЗ№эҙуЈ¬К№ВЦМҘБҰҪшИл·ЗПЯРФұҘәНЗшУтФміЙІ»ОИ¶Ё№ӨҝцЈ¬ІўЙијЖДЈРНФӨІвҝШЦЖЖчФЪФјКшҝЙРРУтДЪЗуҪвҝШЦЖРтБРј°ёъЧЩіөБҫАнПлөДФЛ¶ҜЧҙМ¬Ј¬МбёЯБЛіөБҫөДІЩЧЭОИ¶ЁРФУлЦч¶Ҝ°ІИ«РФ.
1 ¶юЧФУЙ¶ИіөБҫДЈРНРРК»№эіМЦРөДіөБҫКЗТ»ёцҫЯУРЗҝ·ЗПЯРФөДёҙФУПөНіЈ¬ОӘјт»ҜҝШЦЖЖчөДЗуҪв№эіМЈ¬РиТӘ¶ФіөБҫ¶ҜБҰС§ДЈРНҪшРРПЯРФ»Ҝ.¶ЁТеЧшұкФӯөгОӘЦКРДО»ЦГЈ¬x, yЦб·ЦұрұнКҫіөБҫөДЧЭПтј°ІаПтФЛ¶ҜЈ¬УЙҙЛҪЁБўИзНј 1ЛщКҫөД¶юЧФУЙ¶ИІЩЧЭДЈРНЈ¬КҪ(1)іЙБў:
 | (1) |
 | Нј 1 ¶юЧФУЙ¶ИіөБҫДЈРНFig.1 Two-degree-of-freedom vehicle model |
КҪЦРЈәmОӘіөМеЦКБҝЈ»lf, lr·ЦұрОӘіөБҫЦКРДөҪЗ°ЎўәуЦбЦ®јдөДҫаАл; ҰДfОӘЗ°ВЦЧӘҪЗЈ»Fy1, Fy2, Fy3, Fy4·ЦұрОӘЖыіөөДЧуЗ°ЎўУТЗ°ЎўЧуәуј°УТәуВЦМҘІаПтБҰЈ»Fx1, Fx2, Fx3, Fx4·ЦұрОӘЖыіөөДЧуЗ°ЎўУТЗ°ЎўЧуәуј°УТәуВЦМҘЧЭПтБҰЈ»MzОӘәб°ЪБҰҫШ.
јЩЙиҙ№ЦұФШәЙәг¶ЁЗТВЦМҘІаЖ«ҪЗЧг№»РЎЈ¬ВЦМҘІаПтБҰОӘ
 | (2) |


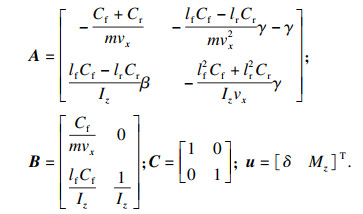
ёщҫЭКҪ(1)Ј¬КҪ(2)ХыәПЧҙМ¬ҝХјд·ҪіМЈә
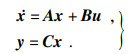 | (3) |
 |

 | (4) |
 | (5) |
 | (6) |

2 іөФШОИҝШөҘФӘҪб№№ЙијЖҝШЦЖПөНіөДХыМеҪб№№ИзНј 2ЛщКҫЈ¬ҝШЦЖЖчҪ«К№ҙҰУЪРРК»№ӨҝцөДіөБҫөДЦКРДІаЖ«ҪЗәНәб°ЪҪЗЛЩ¶ИөДКөјКЦөёъЛжЖЪНыЦөЈ¬ҙУ¶шјЖЛгіцәПККөДёҪјУәб°ЪБҰҫШ.
Нј 2(Fig. 2)
 | Нј 2 іөФШОИҝШөҘФӘЧЬМеҪб№№НјFig.2 Overall structure diagram of vehicle stability control unit |
2.1 КұұдІаЖ«ёХ¶ИДвәПІЯВФҝјВЗВЦМҘІаЖ«ёХ¶ИөДКөКұұд»ҜРФЈ¬УҰУГЧоРЎ¶юіЛ(least square, LS)ЧчОӘДвәПІЯВФЈ¬НЁ№эДвәПөұЗ°ВЦМҘІаЖ«ҪЗј°ФШәЙҙ«өЭ¶ФВЦМҘІаЖ«ёХ¶ИҪшРРКөКұҙҰАн.
ЧоРЎ¶юіЛ·ЁөДДвәП¶юҙО¶аПоКҪОӘ
 | (7) |

»щУЪCarsim·ВХжЖҪМЁҪшРРДЈДвөГөҪnЧйКөСйКэҫЭЈ¬ОӘБЛМбёЯДвәПҫ«¶ИЈ¬ТэИлІРІоЖҪ·ҪәН¶ФҰЛҰСҰШҪшРРЗуҪвЈә
 | (8) |
 | (9) |
 |
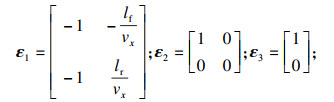
2.2 MPCОИ¶ЁРФҝШЦЖДЈҝйІЙУГДЈРНФӨІвҝШЦЖ(MPC)Лг·ЁЈ¬ЗуҪвЧоУЕёҪјУЗ°ВЦЧӘҪЗј°әб°ЪБҰҫШ.ёщҫЭКҪ(3)СЎИЎЧҙМ¬ұдБҝx=[ҰВ ҰГ]TЈ¬ҝШЦЖБҝy=[ҰД Mz]TЈ¬Ҫ«НЁ№эДвәПөГөҪөДКұұдІаЖ«ёХ¶И

 | (10) |
 |
 | (11) |

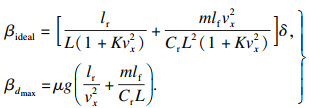
іөБҫФЪФӨІвКұУтДЪСЎИЎәб°ЪҪЗЛЩ¶Иј°ЦКРДІаЖ«ҪЗөДГыТеЦөЧчОӘёъЧЩПоЈә
 | (12) |
 | (13) |
ОӘұЈЦӨіөБҫФЪРРК»№эіМЦРөД°ІИ«РФЈ¬¶ФҝШЦЖБҝЎўҝШЦЖФцБҝј°КдіцБҝҪшРРФјКшөД»щҙЎЙПЈ¬¶ФВЦМҘІаЖ«ҪЗҪшРРФјКшЈ¬ёчФјКшөДұнҙпРОКҪ·ЦұрОӘ
ҝШЦЖБҝФјКшЈә
 | (14) |
 | (15) |
 | (16) |
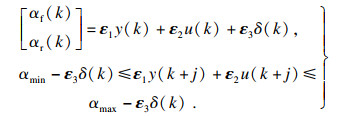 | (17) |
 |
Ҫ«КҪ(13)ҙъИлКҪ(17)Ј¬ҝЙөГ
 | (18) |
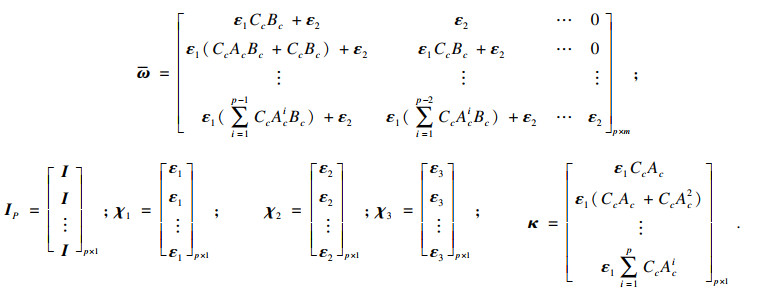 |
3 ·ВХжҪб№ыУл·ЦОцНЁ№э·ВХжКөСйҫЯМе·ЦОцБЛҝШЦЖЖчөДҝШЦЖР§№ы.»щУЪCarsimәНMatlab/SimulinkЙъіЙБӘәП·ВХжЖҪМЁЈ¬ЖдЦР·ВХжіөБҫөДПа№ШІОКэИзұн 1ЛщКҫЈ¬ФЪөҘТЖПЯ№ӨҝцПВҪшРР·ВХж·ЦОц.
ұн 1(Table 1)
| ұн 1 іөБҫөД·ВХжІОКэ Table 1 Vehicle simulation parameters |
ЙиЦГВ·ГжДҰІБПөКэҰМ=0.4Ј¬іөЛЩОӘ100 km/h.УЙНј 3ҝЙЦӘЈ¬іөБҫФЪРРК»№эіМЦРВЦМҘөДІаЖ«ёХ¶ИЛжҙ№ЦұФШәЙІ»¶Пұд»Ҝ¶шҫЯУРІ»И·¶ЁРФЈ¬ЧоРЎ¶юіЛ·ЁУлТЖ¶ҜЧоРЎ¶юіЛ·Ё(moving least squaresЈ¬MLS)¶јДЬ¶ФКұұдІаЖ«ёХ¶ИҪшРРТ»¶ЁөДұнҙпЈ¬ө«LSөДОЗәПРФДЬёьәГ.ДвәПЛщөГөҪөДЗ°ВЦМҘІаЖ«ёХ¶И¶ФХжКөЦөДЬҪшРРУРР§ёъЧЩ.УЙНј 4ҝЙЦӘЈ¬НЁ№эІ№іҘВЦМҘІаЖ«ёХ¶ИҝЙТФФЪТ»¶ЁОуІоДЪЧјИ·Ч·ЧЩКөјКІаПтБҰ.
Нј 3(Fig. 3)
 | Нј 3 З°ЦбВЦМҘІаЖ«ёХ¶ИFig.3 Front axle tire cornering stiffness |
Нј 4(Fig. 4)
 | Нј 4 З°ЦбІаПтБҰFig.4 Front axle lateral force |
УЙНј 5ҝЙЦӘЈ¬ҙЛКұіөБҫөДВЦМҘІаЖ«ҪЗ№эҙуЈ¬ВЦМҘБҰҙҰУЪ·ЗПЯРФұҘәНЗшЈ¬іөБҫИЭТЧіцПЦЧӘНдК§ОИПЦПу.ФЪҪшРРФјКшЗуҪвј°ОИ¶ЁРФҝШЦЖәуөДЗ°ЦбВЦМҘІаЖ«ҪЗФЪ3~5 s·ВХжКұіӨЦРГчПФјхРЎ.УЙНј 6ЎўНј 7ҝЙЦӘЈ¬У뻬ģЧФККУҰҝШЦЖЖч(sliding mode controller, SMC)ПаұИЈ¬»щУЪMPCөДОИ¶ЁРФҝШЦЖ·Ҫ·ЁДЬК№іөБҫФЪҪПРЎОуІоДЪҪ«ЧҙМ¬ІОБҝҝШЦЖФЪДҝұкЦөёҪҪьЈ¬ІўДЬУРР§ТЦЦЖВЦМҘІа»¬ҪЗЈ¬ёьәГёДЙЖіөБҫөД¶ҜМ¬РФДЬ.
Нј 5(Fig. 5)
 | Нј 5 З°ЦбВЦМҘІаЖ«ҪЗFig.5 Front axle tire slip angle |
Нј 6(Fig. 6)
 | Нј 6 әб°ЪҪЗЛЩ¶ИFig.6 Yaw rate |
Нј 7(Fig. 7)
 | Нј 7 ЦКРДІаЖ«ҪЗFig.7 Sideslip angle of mass centre |
4 ҪбВЫ1) ¶ФІаЖ«ёХ¶ИҪшРРДвәПЈ¬МбёЯБЛІаЖ«ёХ¶ИөДұнҙпҫ«¶ИЈ¬ҙУ¶шёьәГГиКціөБҫөұЗ°өДФЛ¶ҜЧҙМ¬.
2) ЙијЖБЛОИ¶ЁРФҝШЦЖ·Ҫ·ЁЈ¬ТэИлВЦМҘІаЖ«ҪЗЧчОӘҝШЦЖЖчөДФјКшМхјюЈ¬К№іөБҫөДҝШЦЖБҝКөјКЦөёъЧЩГыТеЦөЈ¬К№ЛщМбіцөДҝШЦЖ·Ҫ·ЁУРР§јхРЎі¬өчЈ¬ІўДЬФЪҪПРЎОуІоДЪҪ«ЧҙМ¬ІОБҝҝШЦЖФЪДҝұкЦөёҪҪьЈ¬ҙУ¶шұЈЦӨРРК»№эіМЦРөДОИ¶ЁРФУл°ІИ«РФ.
ІОҝјОДПЧ
| [1] | Ma X B, Wong P K, Zhao J, et al. Cornering stability control for vehicles with active front steering system using T-S fuzzy based sliding mode control strategy[J]. Mechanical Systems and Signal Processing, 2018, 3: 347-364. |
| [2] | Sun H, Zhao H, Huang K, et al. A new approach for vehicle lateral velocity and yaw rate control with uncertainty[J]. Asian Journal of Control, 2018, 20(1): 216-227. DOI:10.1002/asjc.1531 |
| [3] | Mehdizadeh M, Soleymani M, Abolmasoumi A H. Stability control of a road vehicle considering model and parametric uncertainties[J]. International Journal of Vehicle Autonomous Systems, 2017, 13(3): 203-220. DOI:10.1504/IJVAS.2017.10004252 |
| [4] | Guo N, Zhang Y, Zou B, et al. A computationally efficient path-following control strategy of autonomous electric vehicles with yaw motion stabilization[J]. IEEE Transactions on Transportation Electrification, 2020, 6(2): 728-739. DOI:10.1109/TTE.2020.2993862 |
| [5] | Biase F D, Timpone L F. Vehicle sideslip angle estimation for a heavy-duty vehicle via extended Kalman filter using a rational tyre model[J]. IEEE Access, 2020, 8: 142120-142130. DOI:10.1109/ACCESS.2020.3012770 |
| [6] | Kim J. Estimation of tire forces using vehicle linear accelerations and yaw rate[J]. Transactions of the Korean Society of Automotive Engineers, 2019, 27(10): 747-753. DOI:10.7467/KSAE.2019.27.10.747 |
| [7] | Aligia D A, Magallan G A, Angelo C H. EV traction control based on nonlinear observers considering longitudinal and lateral tire forces[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2558-2571. DOI:10.1109/TITS.2017.2758343 |
| [8] | Han K, Choi M, Choi S. Estimation of tire cornering stiffness as a road surface classification indicator using under steering characteristics[J]. IEEE Transactions on Vehicular Technology, 2018, 2: 13-21. |
